- Интеллектуальные системы автоматического управления

Содержание
- 2. Направления развития САУ В настоящее время в мировой практике существует устойчивая тенденция, наряду с совершенствованием традиционных
- 3. Направления развития САУ На практике задачи таких областей, как биосинтез, многофазные химико-технологические процессы, управление в условиях
- 4. Особенности интеллектуальных САУ Интеллектуальная САУ способна в той или иной степени воспроизводить определенные интеллектуальные действия человека,
- 5. Требования к ИСАУ В 1989 г. создатель теории интеллектуальных машин Дж. Саридис разработал структурную организацию интеллектуальных
- 6. Принципы организации ИСАУ 1. Наличие взаимодействия управляющих систем с реальным внешним миром с использованием информационных каналов
- 7. Принципы организации ИСАУ 2. Принципиальная открытость систем с целью повышения интеллектуальности и совершенствования собственного поведения. Открытость
- 8. Принципы организации ИСАУ 3. Наличие механизмов прогноза изменения внешнего мира и собственного поведения системы в динамически
- 9. Принципы организации ИСАУ 5 Постоянство функционирования (возможно, с определенной степенью деградации) при разрыве связей или потере
- 10. Различия ИСАУ Под интеллектуальной в большем системой будет пониматься система, соответствующая всем перечисленным принципам. Под интеллектуальной
- 11. Непрерывная адаптация системы Повышение интеллектуальности системы может быть решением известной проблемы актуальности базы знаний - к
- 12. Нечеткая ИСАУ Любая ИСАУ изначально должна иметь некоторый базовый набор знаний о предметной области функционирования, заданный
- 13. Типы нечетких ИСАУ 1. ИСАУ с нечетким контроллером (прямой контроль). Обычная замкнутая система управления с обратной
- 14. Типы нечетких ИСАУ 2. Гибридные нечеткие ИСАУ. ИСАУ, использующая в качестве регулятора гибридный нечеткий контроллер. Гибридный
- 15. Архитектура гибридной нечеткой САУ *
- 16. Типы нечетких ИСАУ 3. Адаптивные нечеткие ИСАУ. В качестве регуляторов используются адаптивные контроллеры. Это тоже двухуровневые
- 17. Особенности практической реализации нечеткого контроллера Для реализации нечеткого алгоритма на микроконтроллерах существует два пути. Первый -
- 18. Особенности практической реализации нечеткого контроллера 2.1. Применение программной реализация на основе микроконтроллеров общего назначения (AVR, PIC,
- 19. Общая структура нечеткой САУ, интеллектуальной в малом * Здесь X - входные параметры системы, Y -
- 20. Блоки в нечетком аппаратном МК * При аппаратной реализации перечисленные блоки реализуются в виде независимых микроэлектронных
- 21. Блоки в нечетком программном МК *
- 22. DFD-диаграмма взаимодействия модулей *
- 23. Структура системы фаззи-регулирования * БН - блок нормирования (сигнал ошибки регулирования ε умножается на масштабный коэффициент
- 24. Унифицированная система функций принадлежности *
- 25. База продукционных правил * Управление осуществляется по двум переменным: отклонению e и скорости изменения отклонения de/dt
- 26. Наименования отдельных термов *
- 27. Нечеткие логические операции * Можно применять арифметические преобразования:
- 28. Операции в бинарной логике *
- 29. Операции в фаззи-логике *
- 30. Пример использования фаззи-логики «Инженеры, обладающие знаниями технологии И экономики производства, имеют хорошие профессиональные перспективы в области
- 31. Решение задачи *
- 32. Пример схемной реализации фази-регулятора *
- 33. Структура системы фаззи-регулирования уровня жидкости *
- 34. Структура адаптивной нечеткой САУ *
- 36. Скачать презентацию
Направления развития САУ
В настоящее время в мировой практике существует устойчивая тенденция,
Направления развития САУ
В настоящее время в мировой практике существует устойчивая тенденция,
Направления развития САУ
На практике задачи таких областей, как биосинтез, многофазные
Направления развития САУ
На практике задачи таких областей, как биосинтез, многофазные
Особенности интеллектуальных САУ
Интеллектуальная САУ способна в той или иной степени
Особенности интеллектуальных САУ
Интеллектуальная САУ способна в той или иной степени
Требования к ИСАУ
В 1989 г. создатель теории интеллектуальных машин Дж. Саридис
Требования к ИСАУ
В 1989 г. создатель теории интеллектуальных машин Дж. Саридис
Принципы организации ИСАУ
1. Наличие взаимодействия управляющих систем с реальным внешним миром с
Принципы организации ИСАУ
1. Наличие взаимодействия управляющих систем с реальным внешним миром с
Принципы организации ИСАУ
2. Принципиальная открытость систем с целью повышения интеллектуальности и совершенствования
Принципы организации ИСАУ
2. Принципиальная открытость систем с целью повышения интеллектуальности и совершенствования
Принципы организации ИСАУ
3. Наличие механизмов прогноза изменения внешнего мира и собственного поведения
Принципы организации ИСАУ
3. Наличие механизмов прогноза изменения внешнего мира и собственного поведения
Принципы организации ИСАУ
5 Постоянство функционирования (возможно, с определенной степенью деградации) при разрыве
Принципы организации ИСАУ
5 Постоянство функционирования (возможно, с определенной степенью деградации) при разрыве
Различия ИСАУ
Под интеллектуальной в большем системой будет пониматься система, соответствующая
Различия ИСАУ
Под интеллектуальной в большем системой будет пониматься система, соответствующая
Непрерывная адаптация системы
Повышение интеллектуальности системы может быть решением известной проблемы
Непрерывная адаптация системы
Повышение интеллектуальности системы может быть решением известной проблемы
Нечеткая ИСАУ
Любая ИСАУ изначально должна иметь некоторый базовый набор знаний о
Нечеткая ИСАУ
Любая ИСАУ изначально должна иметь некоторый базовый набор знаний о
Типы нечетких ИСАУ
1. ИСАУ с нечетким контроллером (прямой контроль). Обычная замкнутая система
Типы нечетких ИСАУ
1. ИСАУ с нечетким контроллером (прямой контроль). Обычная замкнутая система
Типы нечетких ИСАУ
2. Гибридные нечеткие ИСАУ. ИСАУ, использующая в качестве регулятора гибридный
Типы нечетких ИСАУ
2. Гибридные нечеткие ИСАУ. ИСАУ, использующая в качестве регулятора гибридный

Архитектура гибридной нечеткой САУ
*
Архитектура гибридной нечеткой САУ
*
Типы нечетких ИСАУ
3. Адаптивные нечеткие ИСАУ. В качестве регуляторов используются адаптивные контроллеры.
Типы нечетких ИСАУ
3. Адаптивные нечеткие ИСАУ. В качестве регуляторов используются адаптивные контроллеры.
Особенности практической реализации нечеткого контроллера
Для реализации нечеткого алгоритма на микроконтроллерах существует
Особенности практической реализации нечеткого контроллера
Для реализации нечеткого алгоритма на микроконтроллерах существует
Особенности практической реализации нечеткого контроллера
2.1. Применение программной реализация на основе микроконтроллеров
Особенности практической реализации нечеткого контроллера
2.1. Применение программной реализация на основе микроконтроллеров
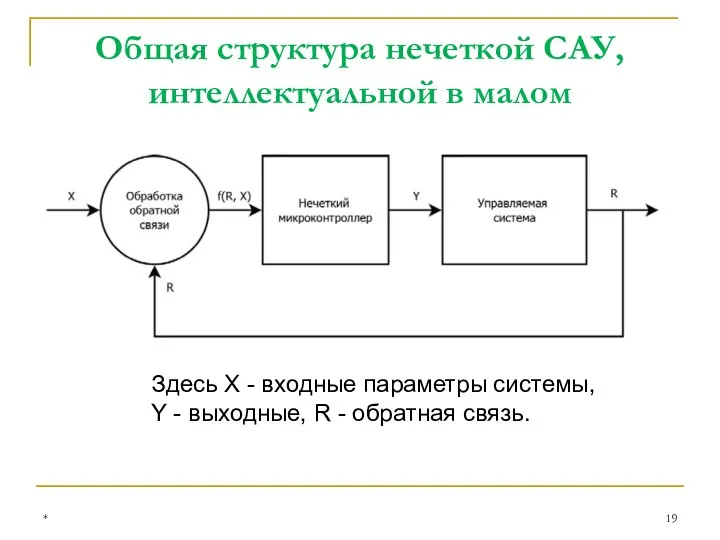
Общая структура нечеткой САУ, интеллектуальной в малом
*
Здесь X - входные параметры
Общая структура нечеткой САУ, интеллектуальной в малом
*
Здесь X - входные параметры

Блоки в нечетком аппаратном МК
*
При аппаратной реализации перечисленные блоки реализуются в
Блоки в нечетком аппаратном МК
*
При аппаратной реализации перечисленные блоки реализуются в

Блоки в нечетком программном МК
*
Блоки в нечетком программном МК
*

DFD-диаграмма взаимодействия модулей
*
DFD-диаграмма взаимодействия модулей
*
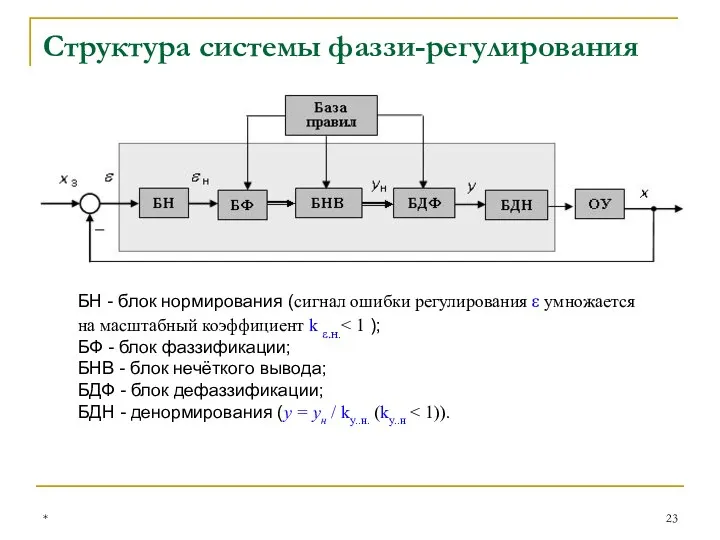
Структура системы фаззи-регулирования
*
БН - блок нормирования (сигнал ошибки регулирования ε умножается
Структура системы фаззи-регулирования
*
БН - блок нормирования (сигнал ошибки регулирования ε умножается
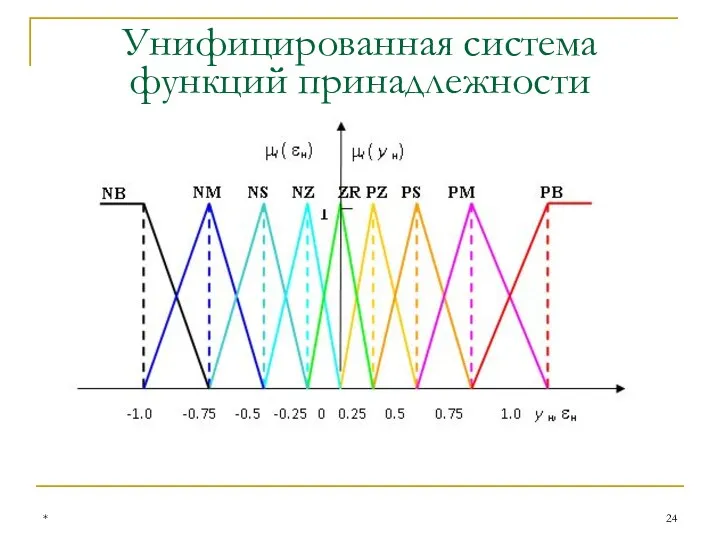
Унифицированная система функций принадлежности
*
Унифицированная система функций принадлежности
*
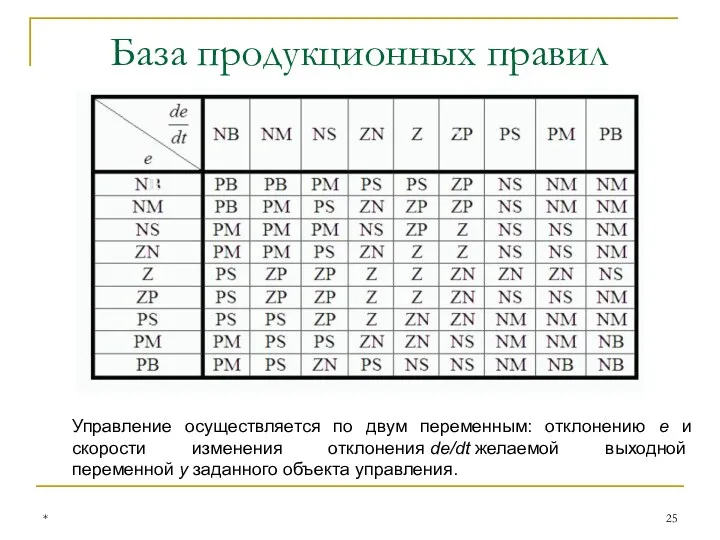
База продукционных правил
*
Управление осуществляется по двум переменным: отклонению e и скорости
База продукционных правил
*
Управление осуществляется по двум переменным: отклонению e и скорости

Наименования отдельных термов
*
Наименования отдельных термов
*
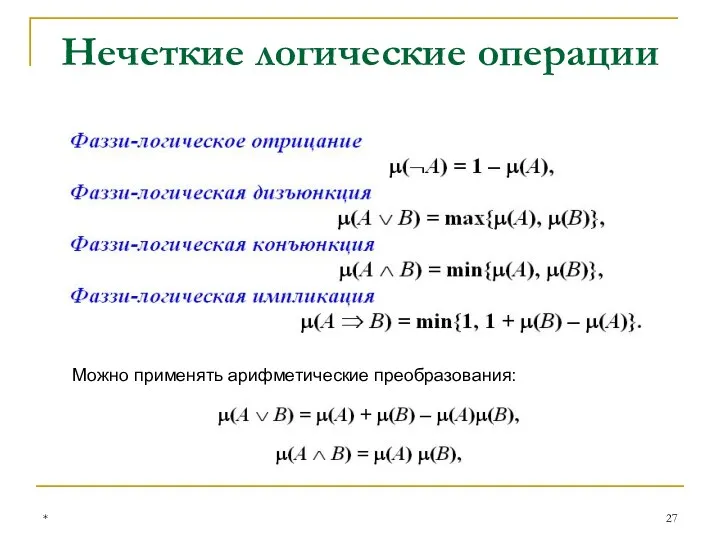
Нечеткие логические операции
*
Можно применять арифметические преобразования:
Нечеткие логические операции
*
Можно применять арифметические преобразования:

Операции в бинарной логике
*
Операции в бинарной логике
*
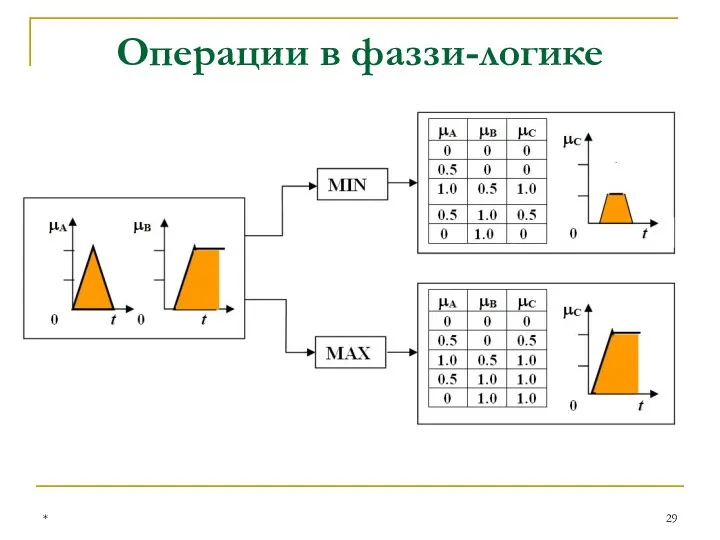
Операции в фаззи-логике
*
Операции в фаззи-логике
*
Пример использования фаззи-логики
«Инженеры, обладающие знаниями технологии И экономики производства, имеют
Пример использования фаззи-логики
«Инженеры, обладающие знаниями технологии И экономики производства, имеют
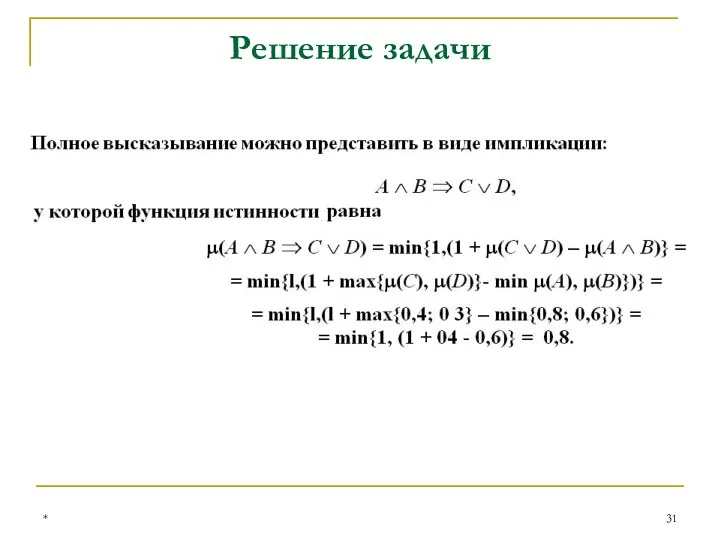
Решение задачи
*
Решение задачи
*
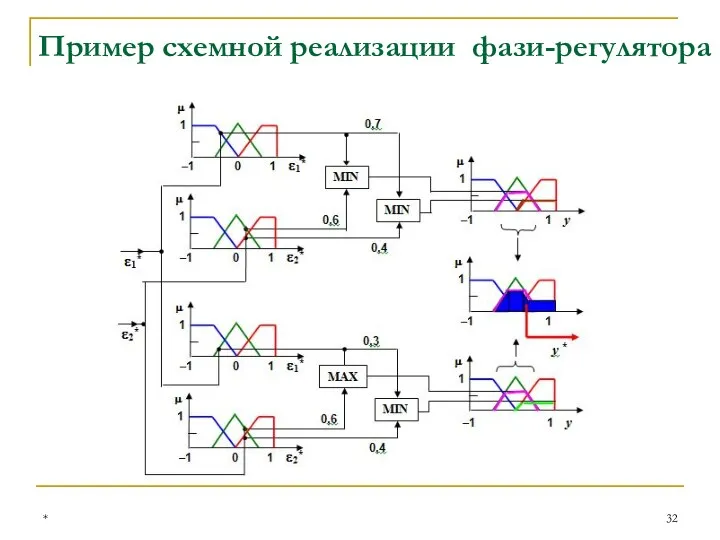
Пример схемной реализации фази-регулятора
*
Пример схемной реализации фази-регулятора
*
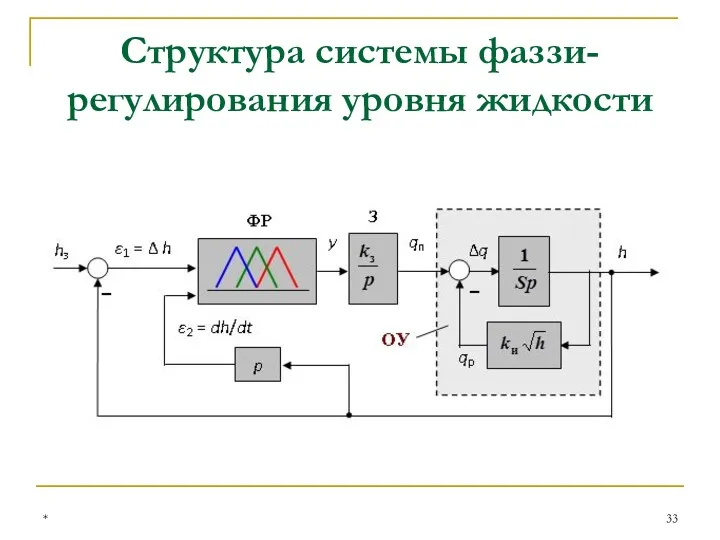
Структура системы фаззи-регулирования уровня жидкости
*
Структура системы фаззи-регулирования уровня жидкости
*

Структура адаптивной нечеткой САУ
*
Структура адаптивной нечеткой САУ
*
 Алгоритмы
Алгоритмы Глобальные сети
Глобальные сети Путешествие в страну Информатика. 8 класс
Путешествие в страну Информатика. 8 класс CISCO CCIE Program
CISCO CCIE Program Моделирование корреляционных зависимостей
Моделирование корреляционных зависимостей Интернет-зависимость
Интернет-зависимость Настройка коммутаторов Cisco
Настройка коммутаторов Cisco Конвергентные и цифровые технологии
Конвергентные и цифровые технологии Деловая графика в электронных таблицах.
Деловая графика в электронных таблицах. Инженерия программного обеспечения. Введение (модуль 1)
Инженерия программного обеспечения. Введение (модуль 1) Мобильные операционные системы
Мобильные операционные системы Рекомендации психолога
Рекомендации психолога Многоуровневые ИВС и эталонная модель взаимосвязи открытых систем. Занятие 05, 06
Многоуровневые ИВС и эталонная модель взаимосвязи открытых систем. Занятие 05, 06 Компьютерные объекты
Компьютерные объекты История развития компьютерной техники. 8 класс
История развития компьютерной техники. 8 класс Завдання: Написати програму, яка переводить числа з арабської системи в римську
Завдання: Написати програму, яка переводить числа з арабської системи в римську OSINT(Open Source Intelligency)
OSINT(Open Source Intelligency) Урок по теме Работа со шрифтами. Форматирование текста. 8 класс.
Урок по теме Работа со шрифтами. Форматирование текста. 8 класс. Регистрация в WealTcom
Регистрация в WealTcom Презентация Перевод чисел между системами счисления, основания которых являются степенями числа 2 10 класс
Презентация Перевод чисел между системами счисления, основания которых являются степенями числа 2 10 класс Информационно-логические основы ЭВМ
Информационно-логические основы ЭВМ Тораптық утелиттердің жұмысын оқып үйрену
Тораптық утелиттердің жұмысын оқып үйрену Безопасность при использовании современных гаджетов
Безопасность при использовании современных гаджетов Тестирование мобильных приложений
Тестирование мобильных приложений Текстові і графічні обʼєкти на слайдах. Урок 30
Текстові і графічні обʼєкти на слайдах. Урок 30 Ақпарат. Компьютер. Компьютер құрылғылары,ақпараттық модель
Ақпарат. Компьютер. Компьютер құрылғылары,ақпараттық модель Первый канал
Первый канал Первоначальные сведения о мониторах
Первоначальные сведения о мониторах