- Лекция 5. Проекции

Содержание
- 2. Проекции Проекция задает способ отображения объектов на графическом устройстве Устройства, которые создают истинно объемные изображения, пока
- 3. Мировые и экранные координаты Рассмотрим две системы координат: • мировые координаты – описывают истинное положение объектов
- 4. Основные типы проекций В компьютерной графике наиболее распространены параллельная и центральная проекции Для параллельной проекции лучи
- 5. Аксонометрическая проекция Аксонометрическая проекция – это разновидность параллельной проекции Для нее все лучи проецирования располагаются под
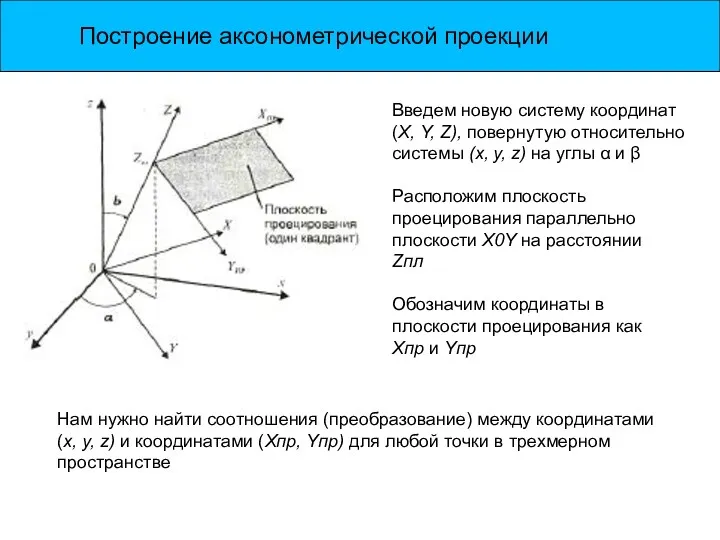
- 6. Построение аксонометрической проекции Введем новую систему координат (X, Y, Z), повернутую относительно системы (х, у, z)
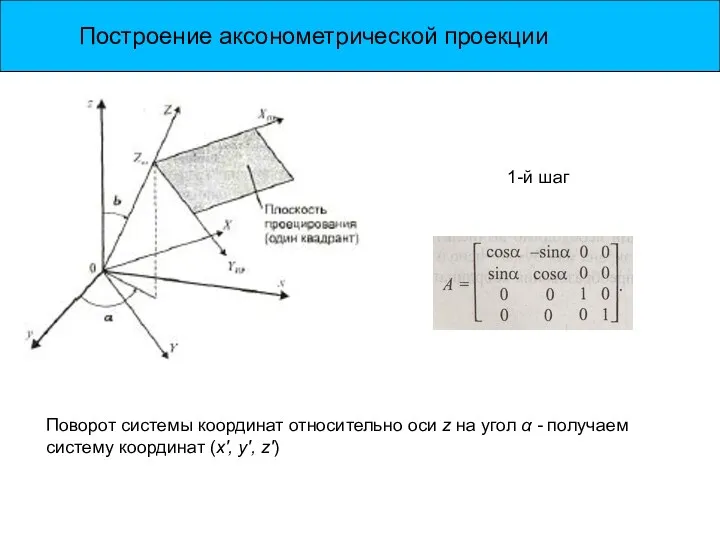
- 7. Построение аксонометрической проекции Поворот системы координат относительно оси z на угол α - получаем систему координат
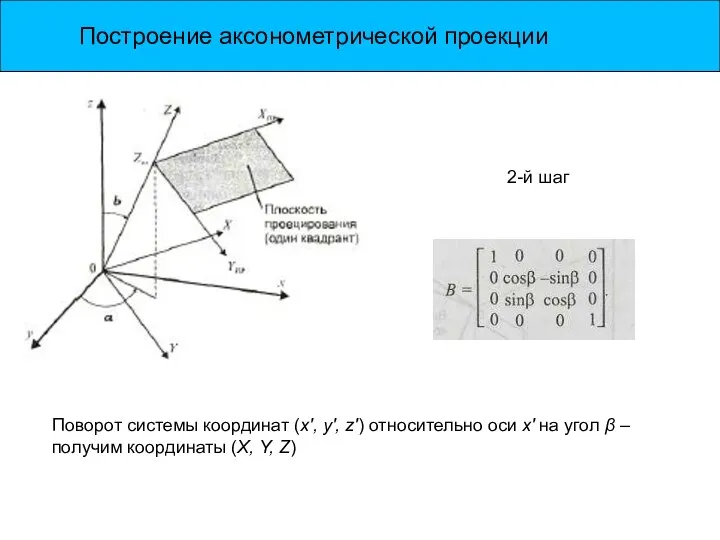
- 8. Построение аксонометрической проекции 2-й шаг Поворот системы координат (х', у', z') относительно оси х' на угол
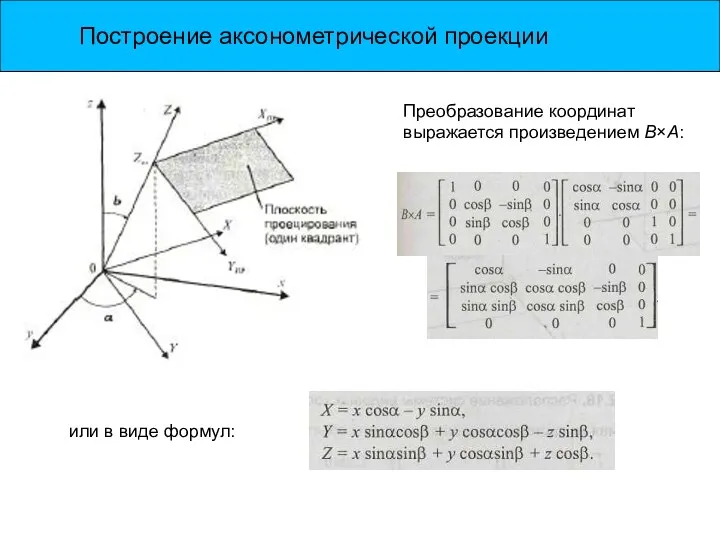
- 9. Построение аксонометрической проекции Преобразование координат выражается произведением В×А: или в виде формул:
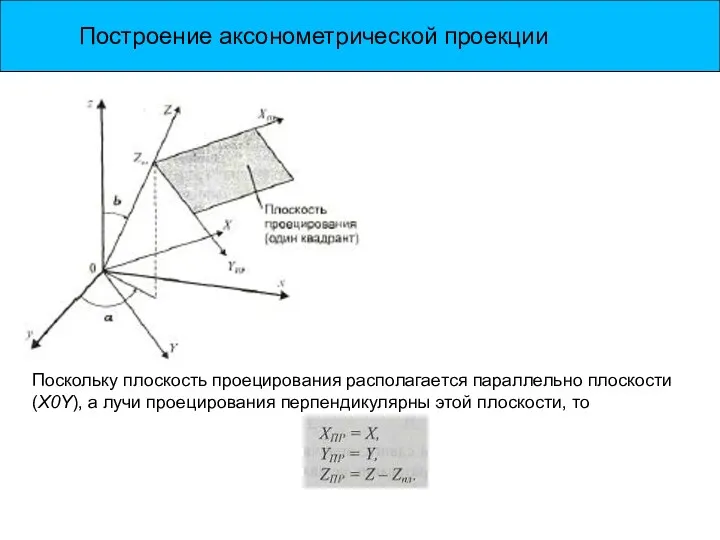
- 10. Построение аксонометрической проекции Поскольку плоскость проецирования располагается параллельно плоскости (X0Y), а лучи проецирования перпендикулярны этой плоскости,
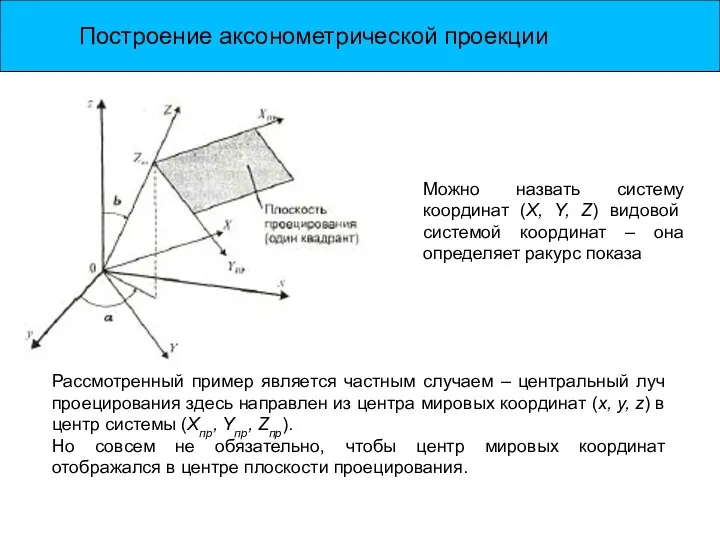
- 11. Построение аксонометрической проекции Рассмотренный пример является частным случаем – центральный луч проецирования здесь направлен из центра
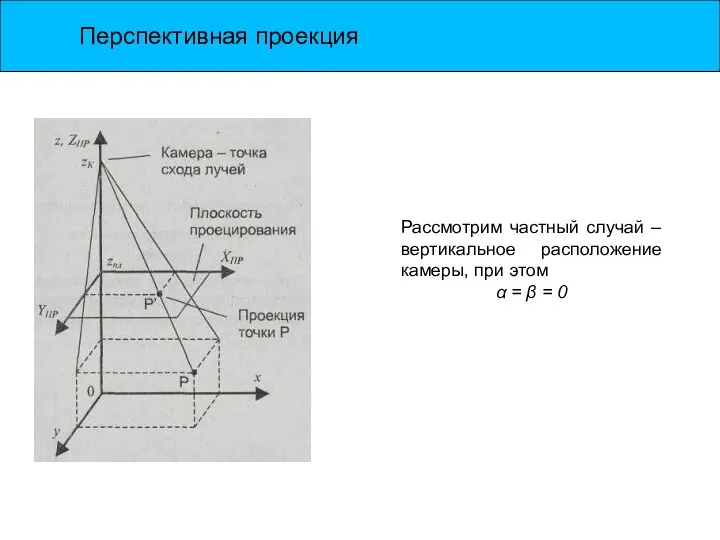
- 12. Перспективная проекция Рассмотрим частный случай – вертикальное расположение камеры, при этом α = β = 0
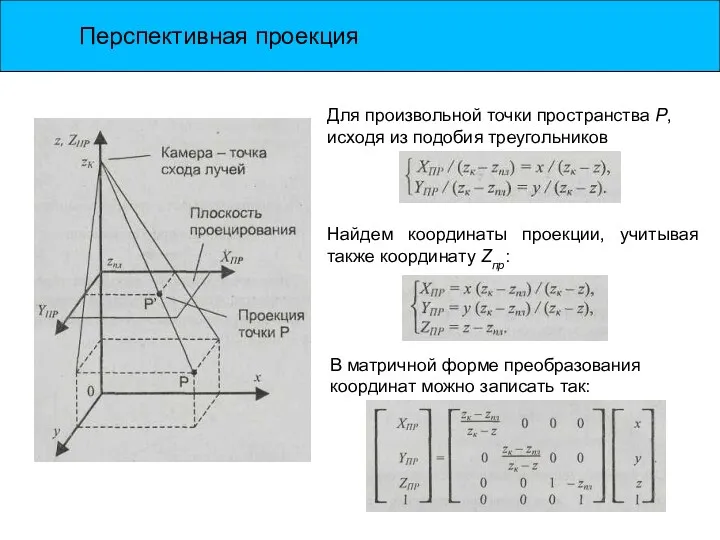
- 13. Перспективная проекция Для произвольной точки пространства Р, исходя из подобия треугольников Найдем координаты проекции, учитывая также
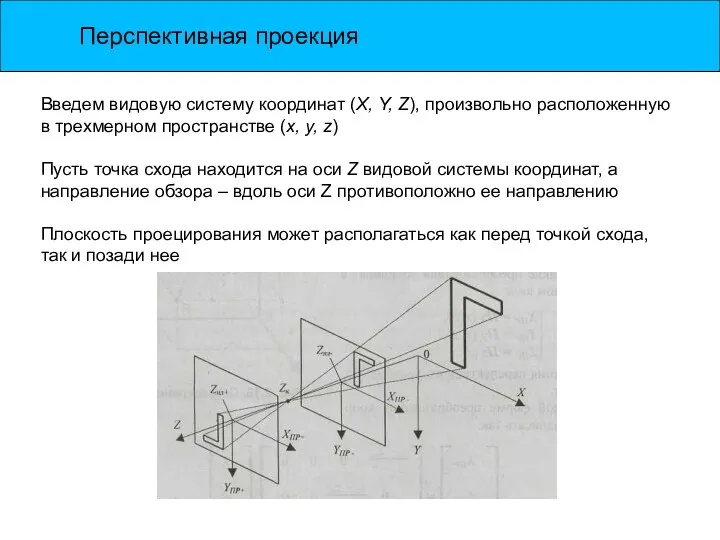
- 14. Перспективная проекция Введем видовую систему координат (X, Y, Z), произвольно расположенную в трехмерном пространстве (х, у,
- 16. Скачать презентацию
Проекции
Проекция задает способ отображения объектов на графическом устройстве
Устройства, которые создают
Проекции
Проекция задает способ отображения объектов на графическом устройстве
Устройства, которые создают
Мировые и экранные координаты
Рассмотрим две системы координат:
• мировые координаты – описывают
Мировые и экранные координаты
Рассмотрим две системы координат:
• мировые координаты – описывают
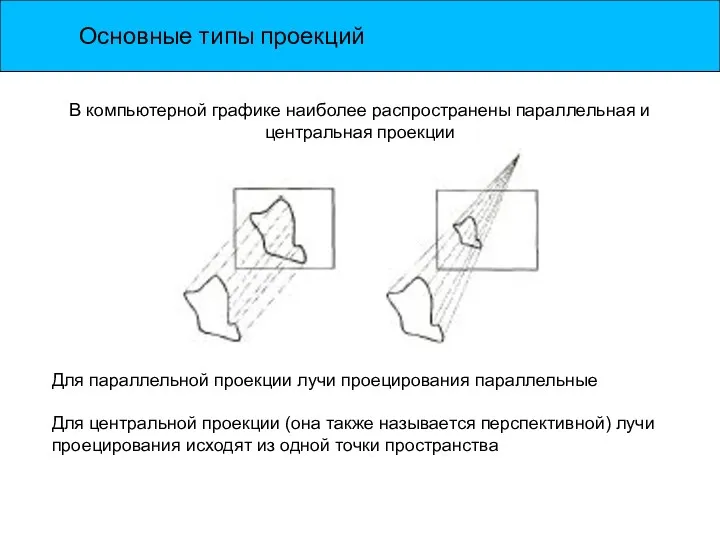
Основные типы проекций
В компьютерной графике наиболее распространены параллельная и центральная проекции
Для
Основные типы проекций
В компьютерной графике наиболее распространены параллельная и центральная проекции
Для
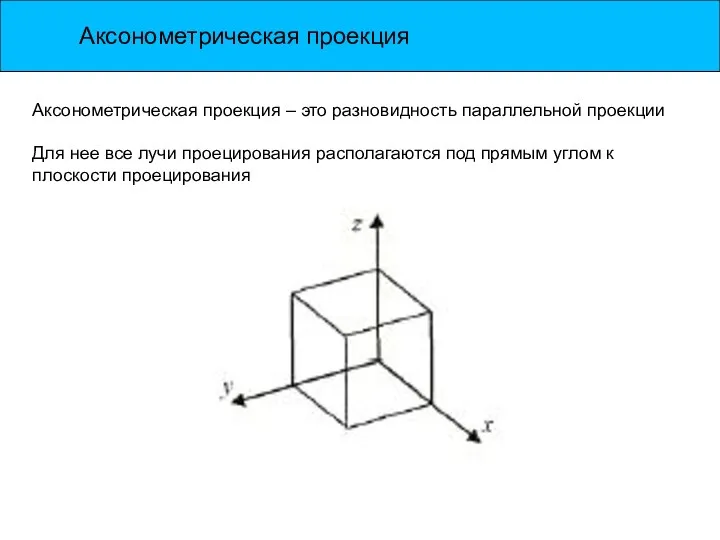
Аксонометрическая проекция
Аксонометрическая проекция – это разновидность параллельной проекции
Для нее все
Аксонометрическая проекция
Аксонометрическая проекция – это разновидность параллельной проекции
Для нее все
Построение аксонометрической проекции
Введем новую систему координат (X, Y, Z), повернутую относительно
Построение аксонометрической проекции
Введем новую систему координат (X, Y, Z), повернутую относительно
Построение аксонометрической проекции
Поворот системы координат относительно оси z на угол α
Построение аксонометрической проекции
Поворот системы координат относительно оси z на угол α
Построение аксонометрической проекции
2-й шаг
Поворот системы координат (х', у', z') относительно оси
Построение аксонометрической проекции
2-й шаг
Поворот системы координат (х', у', z') относительно оси
Построение аксонометрической проекции
Преобразование координат выражается произведением В×А:
или в виде формул:
Построение аксонометрической проекции
Преобразование координат выражается произведением В×А:
или в виде формул:
Построение аксонометрической проекции
Поскольку плоскость проецирования располагается параллельно плоскости (X0Y), а лучи
Построение аксонометрической проекции
Поскольку плоскость проецирования располагается параллельно плоскости (X0Y), а лучи
Построение аксонометрической проекции
Рассмотренный пример является частным случаем – центральный луч проецирования
Построение аксонометрической проекции
Рассмотренный пример является частным случаем – центральный луч проецирования
Перспективная проекция
Рассмотрим частный случай – вертикальное расположение камеры, при этом
α = β = 0
Перспективная проекция
Рассмотрим частный случай – вертикальное расположение камеры, при этом
α = β = 0
Перспективная проекция
Для произвольной точки пространства Р, исходя из подобия треугольников
Найдем координаты
Перспективная проекция
Для произвольной точки пространства Р, исходя из подобия треугольников
Найдем координаты
Перспективная проекция
Введем видовую систему координат (X, Y, Z), произвольно расположенную в
Перспективная проекция
Введем видовую систему координат (X, Y, Z), произвольно расположенную в
 Массивы
Массивы Безопасность баз данных
Безопасность баз данных Информация, информационные процессы и информационное общество
Информация, информационные процессы и информационное общество Алгоритмизация и программирование. Переменные
Алгоритмизация и программирование. Переменные Функции проверки
Функции проверки Преобразование информации путем рассуждений
Преобразование информации путем рассуждений Система станционной телемеханики
Система станционной телемеханики Компьютерные сети. Классификация, топология, основные понятия и термины. Лекция 7
Компьютерные сети. Классификация, топология, основные понятия и термины. Лекция 7 Автоматизированные и автоматические системы управления
Автоматизированные и автоматические системы управления Сервисы Интернет. Компьютерные телекоммуникации
Сервисы Интернет. Компьютерные телекоммуникации Молоко. Классификация молока по виду животного
Молоко. Классификация молока по виду животного Правила поведінки і БЖ в кабінеті. Поштова служба Інтернету
Правила поведінки і БЖ в кабінеті. Поштова служба Інтернету Сайт Память народа
Сайт Память народа Комбинированный алгоритм. Программирование черепашки для постройки дома. Использование инвентаряв одной программе
Комбинированный алгоритм. Программирование черепашки для постройки дома. Использование инвентаряв одной программе Интеллектуальные ценности
Интеллектуальные ценности Мікропроцесорна техніка. PSoC’s Routing Resources Цифрова частина системи
Мікропроцесорна техніка. PSoC’s Routing Resources Цифрова частина системи Web sites i recommend
Web sites i recommend Автоматизированная система учёта товара в строительном магазине
Автоматизированная система учёта товара в строительном магазине Машинные системы счисления
Машинные системы счисления Информация. Измерение количества информации
Информация. Измерение количества информации Реабилитация в эпоху цифровых технологий
Реабилитация в эпоху цифровых технологий Кодирование графической информации
Кодирование графической информации Автоматтандырылған жобалау жүйесі
Автоматтандырылған жобалау жүйесі Роль журналиста в обществе
Роль журналиста в обществе Робот-спасатель ЯМ-3
Робот-спасатель ЯМ-3 Тим Бернерс-Ли. Отец всемирной паутины
Тим Бернерс-Ли. Отец всемирной паутины IPC. Product Lines. Roadmap
IPC. Product Lines. Roadmap Software design. (Lecture10)
Software design. (Lecture10)