- Методы поиска областей открытия и закрытия в видео и способы их улучшения

Содержание
- 2. Содержание Введение Методы поиска областей открытия/закрытия Методы построения оптического потока Заключение
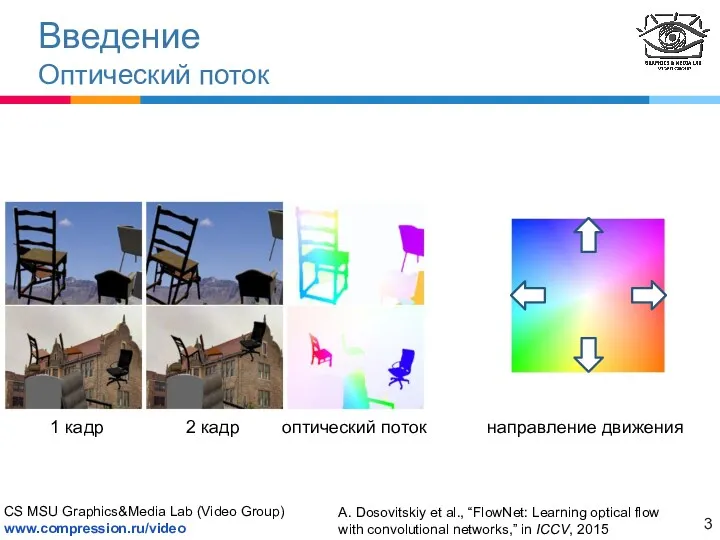
- 3. Введение Оптический поток A. Dosovitskiy et al., “FlowNet: Learning optical flow with convolutional networks,” in ICCV,
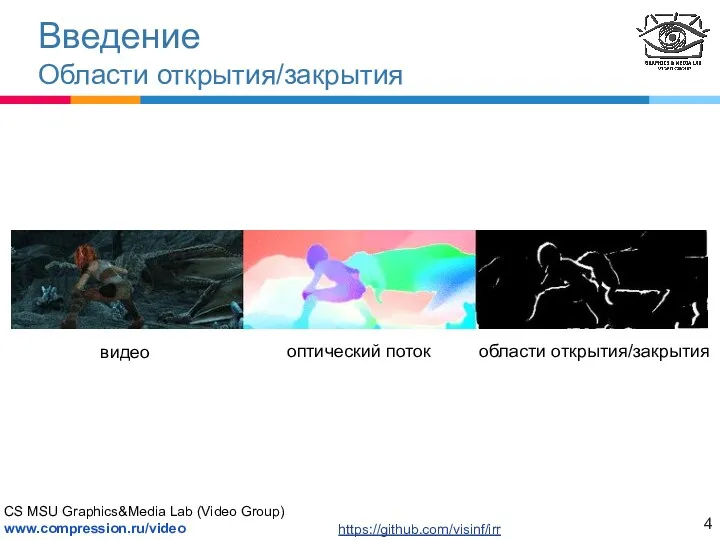
- 4. Введение Области открытия/закрытия https://github.com/visinf/irr видео оптический поток области открытия/закрытия
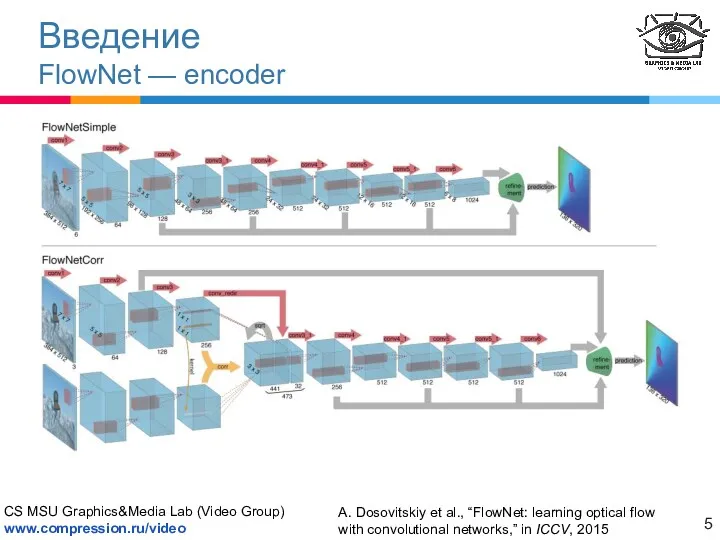
- 5. Введение FlowNet — encoder A. Dosovitskiy et al., “FlowNet: learning optical flow with convolutional networks,” in
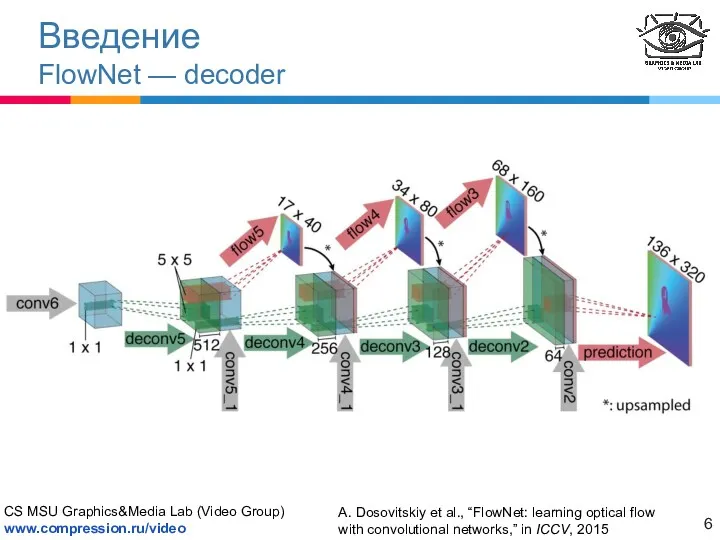
- 6. Введение FlowNet — decoder A. Dosovitskiy et al., “FlowNet: learning optical flow with convolutional networks,” in
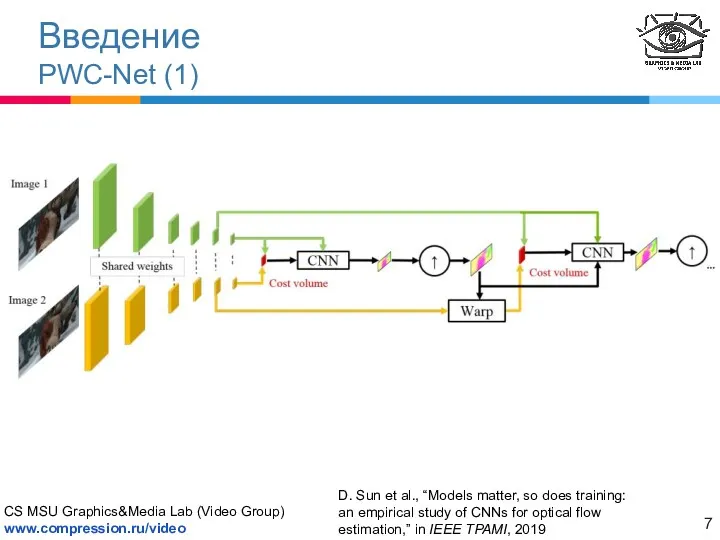
- 7. Введение PWC-Net (1) D. Sun et al., “Models matter, so does training: an empirical study of
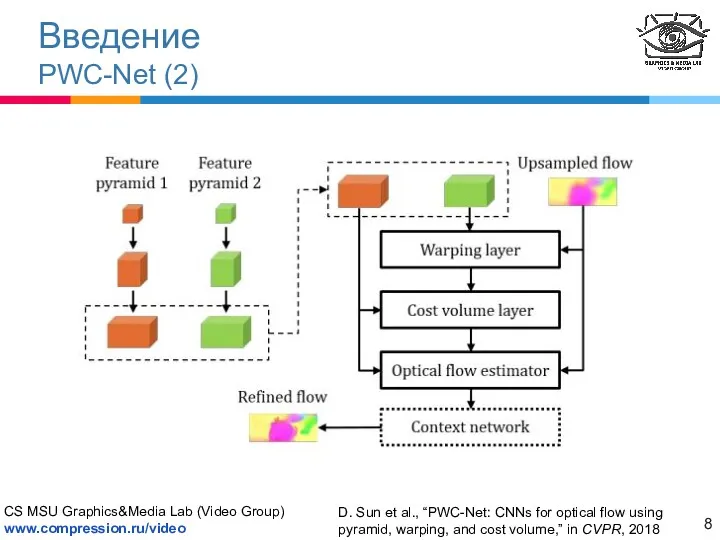
- 8. Введение PWC-Net (2) D. Sun et al., “PWC-Net: CNNs for optical flow using pyramid, warping, and
- 9. Содержание Введение Методы поиска областей открытия/закрытия IRR-PWC FlowNet-CSSR ContinualFlow Методы поиска оптического потока Заключение
- 10. IRR-PWC Суть метода Прогоняют поток через одну и ту же сеть несколько раз, в основе —
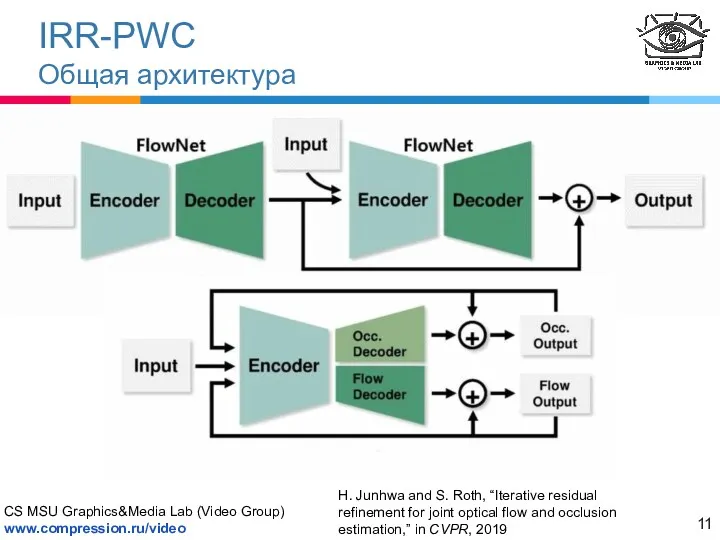
- 11. IRR-PWC Общая архитектура H. Junhwa and S. Roth, “Iterative residual refinement for joint optical flow and
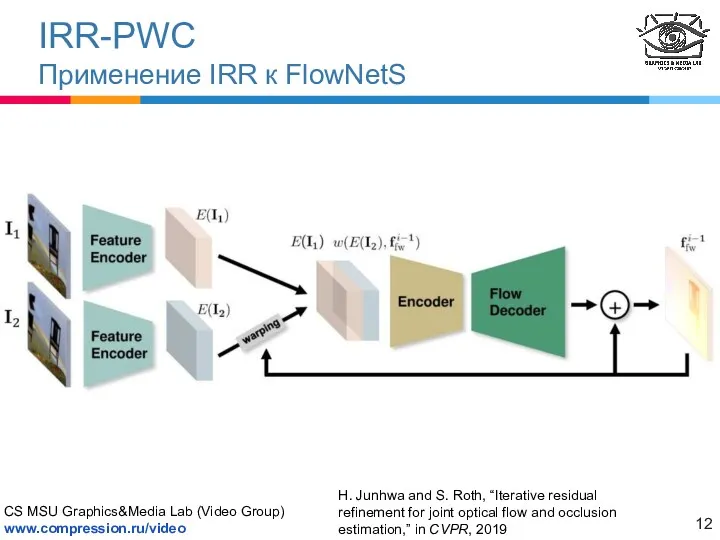
- 12. IRR-PWC Применение IRR к FlowNetS H. Junhwa and S. Roth, “Iterative residual refinement for joint optical
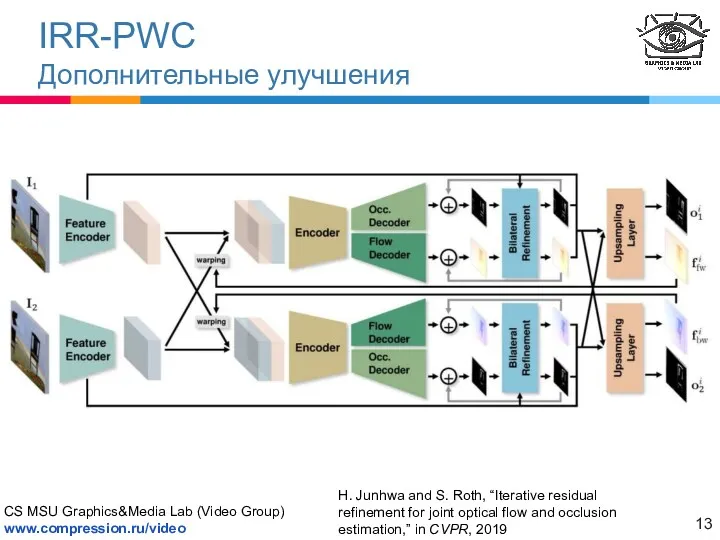
- 13. IRR-PWC Дополнительные улучшения H. Junhwa and S. Roth, “Iterative residual refinement for joint optical flow and
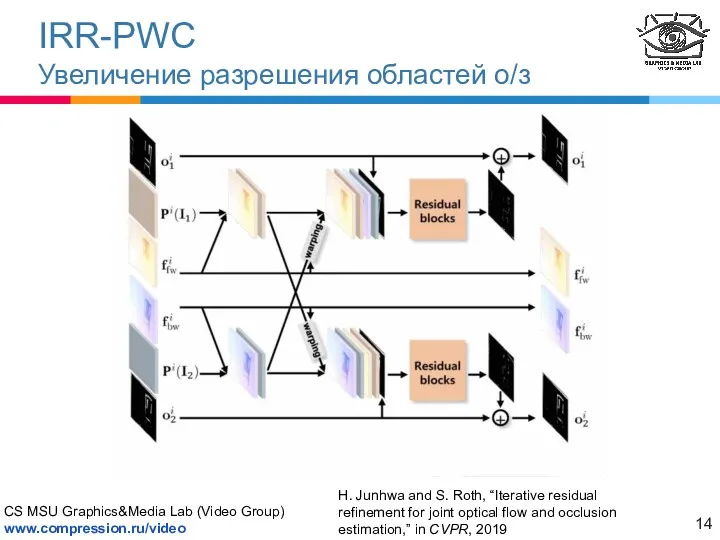
- 14. IRR-PWC Увеличение разрешения областей о/з H. Junhwa and S. Roth, “Iterative residual refinement for joint optical
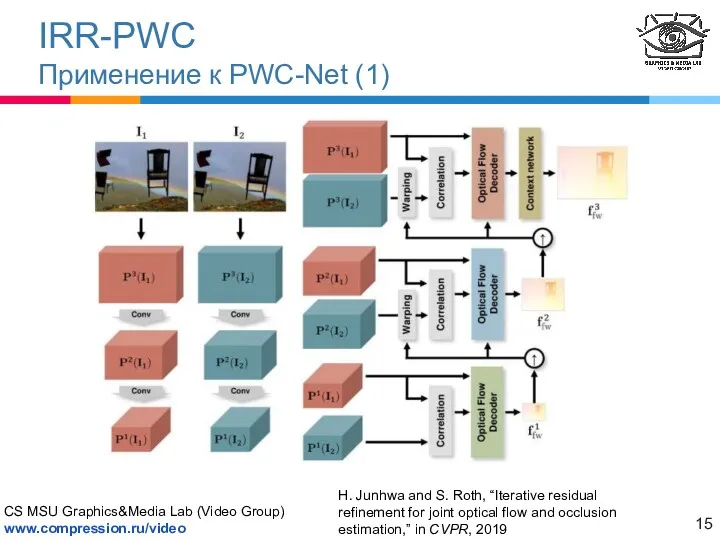
- 15. IRR-PWC Применение к PWC-Net (1) H. Junhwa and S. Roth, “Iterative residual refinement for joint optical
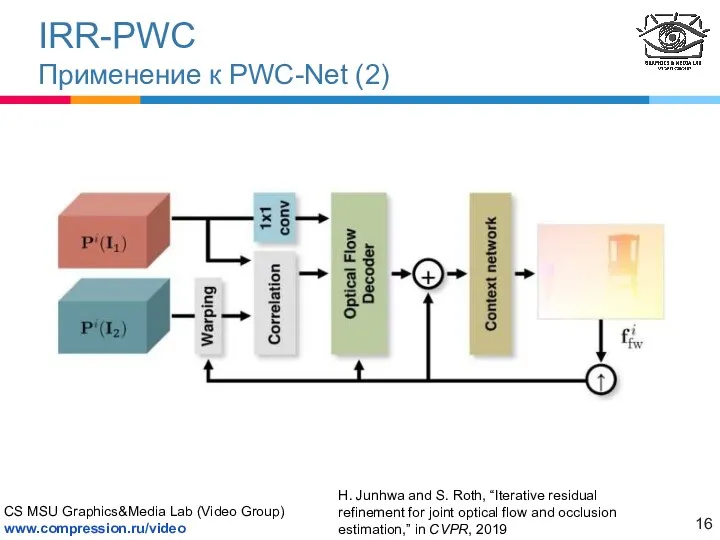
- 16. IRR-PWC Применение к PWC-Net (2) H. Junhwa and S. Roth, “Iterative residual refinement for joint optical
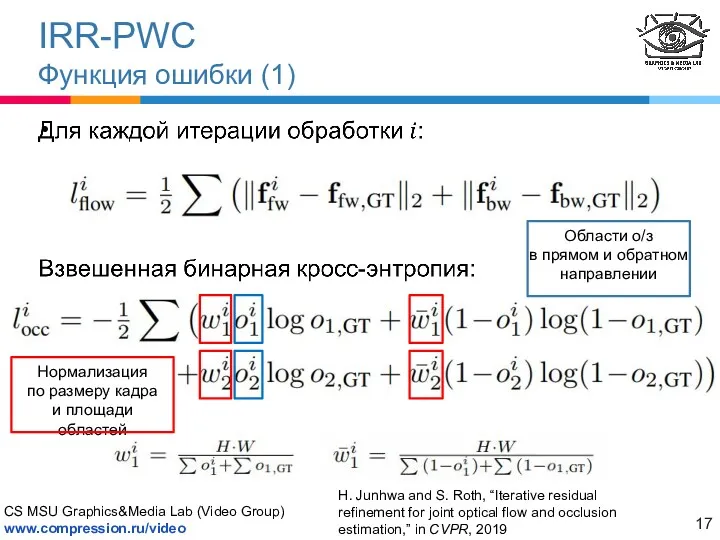
- 17. IRR-PWC Функция ошибки (1) H. Junhwa and S. Roth, “Iterative residual refinement for joint optical flow
- 18. IRR-PWC Функция ошибки (2) H. Junhwa and S. Roth, “Iterative residual refinement for joint optical flow
- 19. IRR-PWC Обучение H. Junhwa and S. Roth, “Iterative residual refinement for joint optical flow and occlusion
- 20. IRR-PWC Исследование предложенных улучшений H. Junhwa and S. Roth, “Iterative residual refinement for joint optical flow
- 21. IRR-PWC MPI-Sintel (оптический поток) H. Junhwa and S. Roth, “Iterative residual refinement for joint optical flow
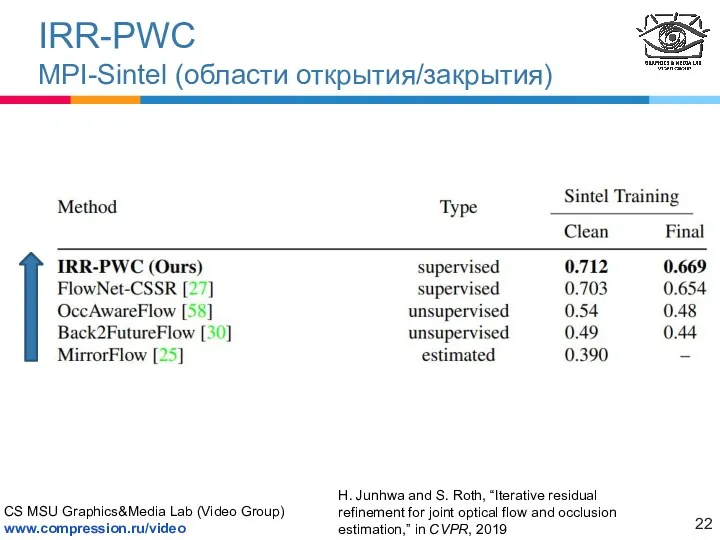
- 22. IRR-PWC MPI-Sintel (области открытия/закрытия) H. Junhwa and S. Roth, “Iterative residual refinement for joint optical flow
- 23. IRR-PWC Выводы Достоинства: Один из лучших по качеству оптического потока Лучший по качеству областей открытия/закрытия Размер
- 24. Содержание Введение Методы поиска областей открытия/закрытия IRR-PWC FlowNet-CSSR ContinualFlow Методы поиска оптического потока Заключение
- 25. FlowNet-CSSR Суть метода Построение сети аналогично FlowNet 2.0 Вычисляют: Оптический поток Области о/з Диспаритет Границы объектов
- 26. FlowNet-CSSR Архитектура (1) (a). Основная архитектура E. Ilg et al., “Occlusions, motion and depth boundaries with
- 27. FlowNet-CSSR Архитектура (2) (b). Прямое и обратное вычисление оптического потока и областей открытия/закрытия E. Ilg et
- 28. FlowNet-CSSR Архитектура (3) (c). Еще один вариант с прямым и обратным вычислением E. Ilg et al.,
- 29. FlowNet-CSSR Архитектура (4) (d). Использование диспаритета E. Ilg et al., “Occlusions, motion and depth boundaries with
- 30. FlowNet-CSSR Обучение Для каждой сети в стеке: FlyingChairs — 600 000 итераций FlyingThings3D — 250 000
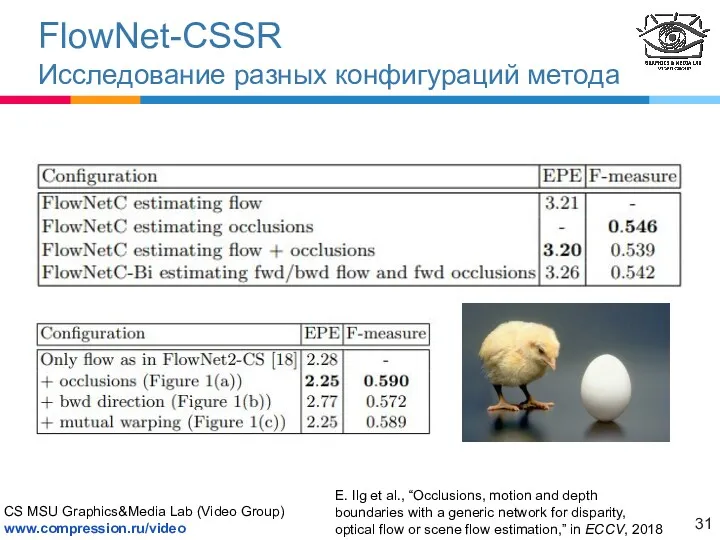
- 31. FlowNet-CSSR Исследование разных конфигураций метода E. Ilg et al., “Occlusions, motion and depth boundaries with a
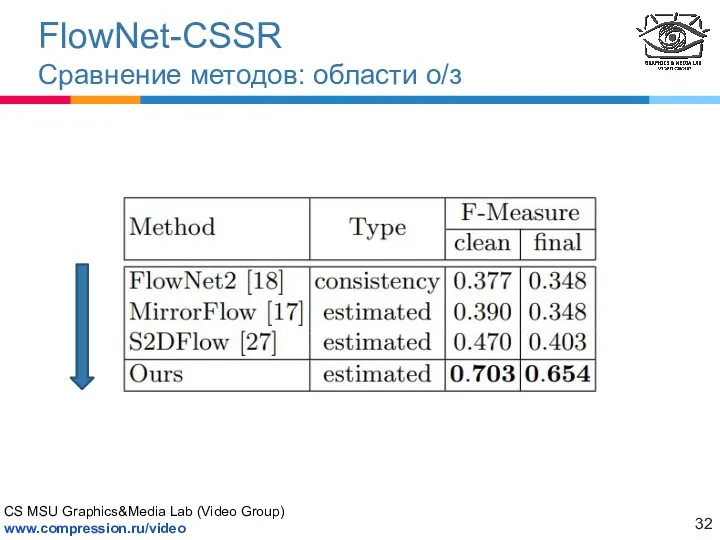
- 32. FlowNet-CSSR Сравнение методов: области о/з
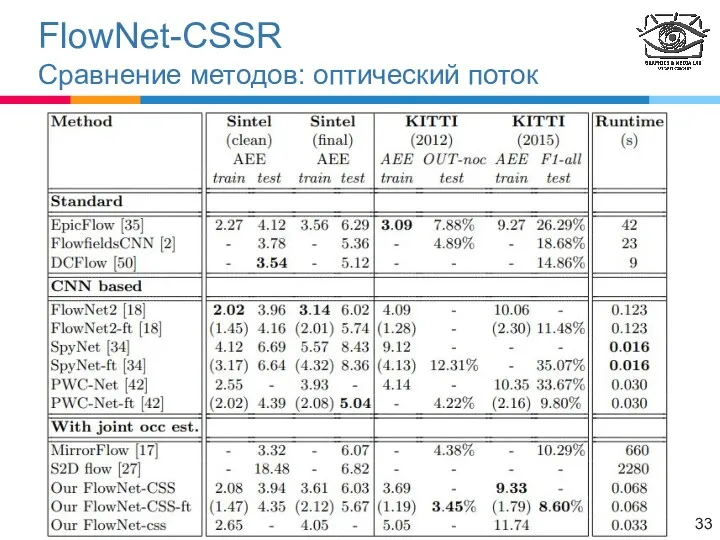
- 33. FlowNet-CSSR Сравнение методов: оптический поток E. Ilg et al., “Occlusions, motion and depth boundaries with a
- 35. FlowNet-CSSR Выводы Достоинства: Универсальное решение многих задач Лучший результат по областям о/з на момент публикации (Sintel)
- 36. Содержание Введение Методы поиска областей открытия/закрытия IRR-PWC FlowNet-CSSR ContinualFlow Методы поиска оптического потока Заключение
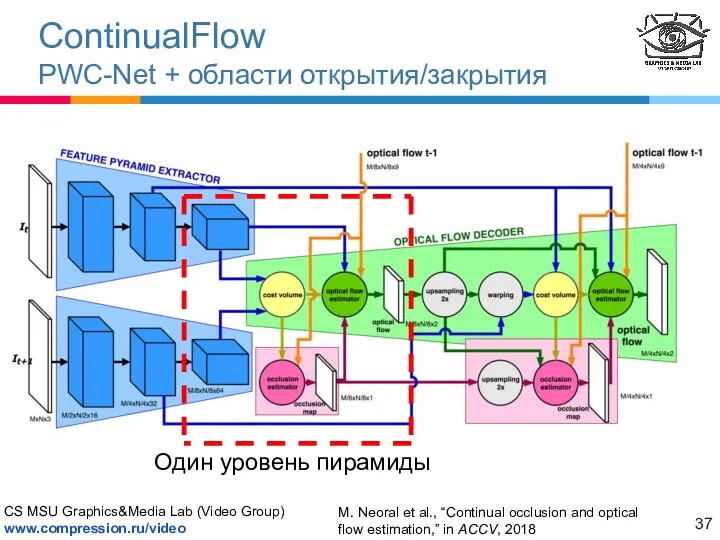
- 37. ContinualFlow PWC-Net + области открытия/закрытия M. Neoral et al., “Continual occlusion and optical flow estimation,” in
- 38. ContinualFlow Использование временного домена (1) M. Neoral et al., “Continual occlusion and optical flow estimation,” in
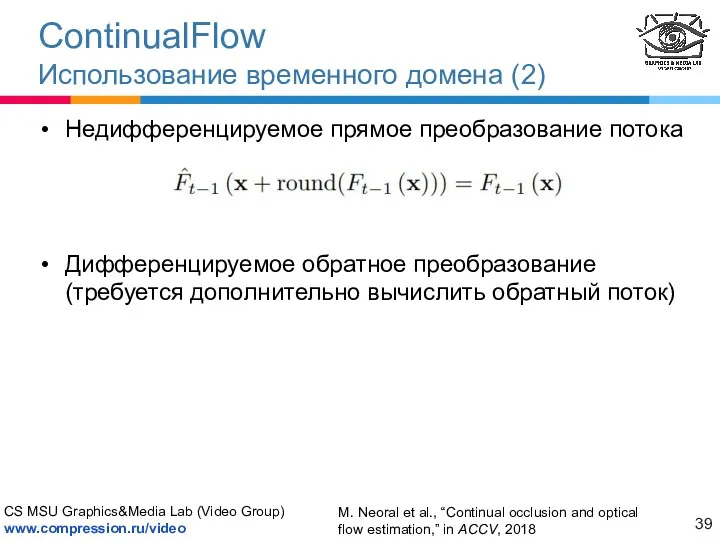
- 39. ContinualFlow Использование временного домена (2) M. Neoral et al., “Continual occlusion and optical flow estimation,” in
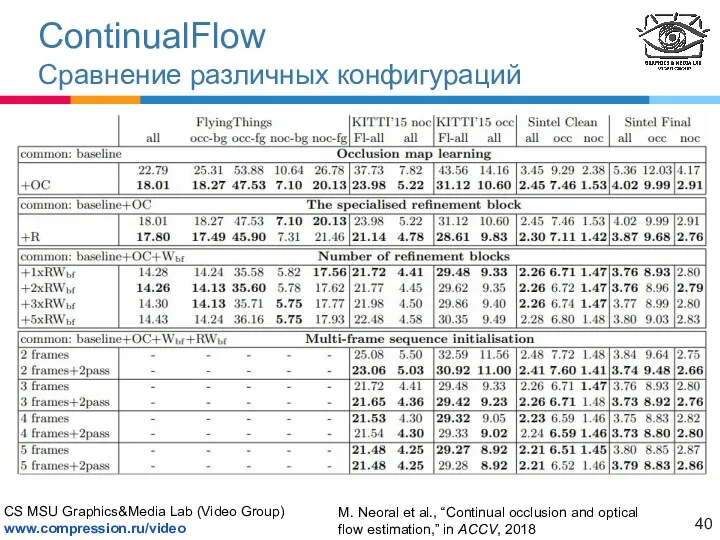
- 40. ContinualFlow Сравнение различных конфигураций M. Neoral et al., “Continual occlusion and optical flow estimation,” in ACCV,
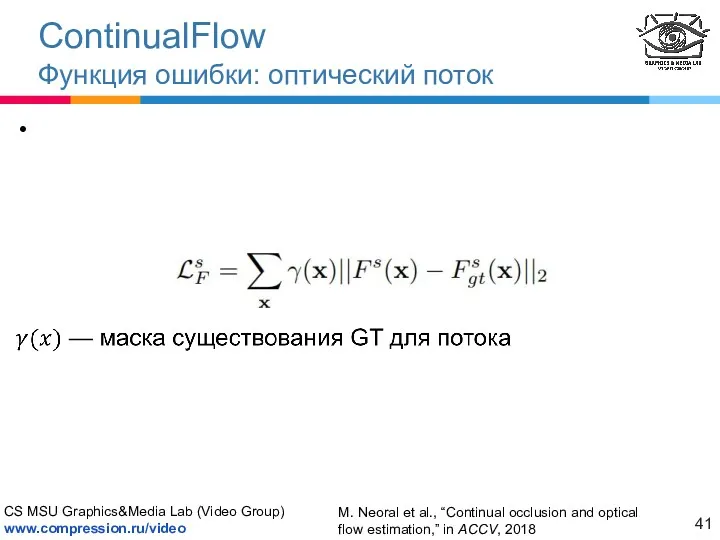
- 41. ContinualFlow Функция ошибки: оптический поток M. Neoral et al., “Continual occlusion and optical flow estimation,” in
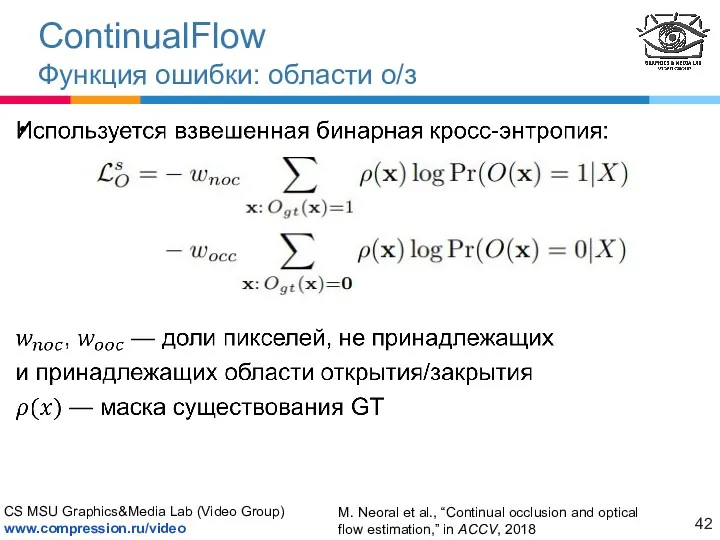
- 42. ContinualFlow Функция ошибки: области о/з M. Neoral et al., “Continual occlusion and optical flow estimation,” in
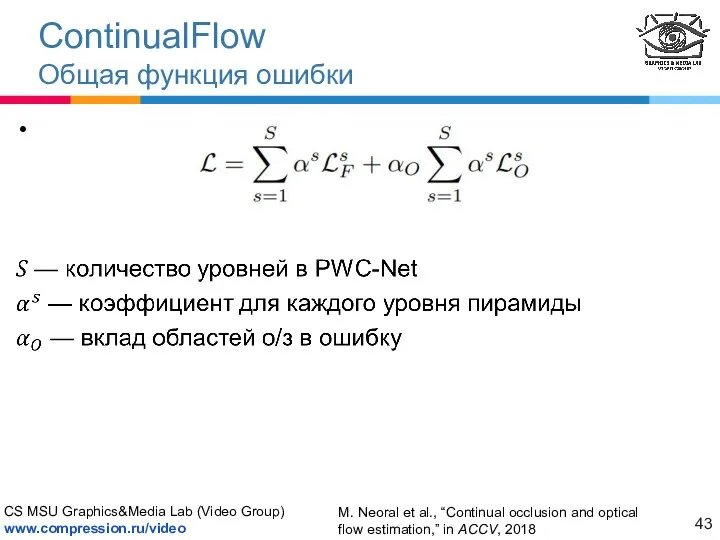
- 43. ContinualFlow Общая функция ошибки M. Neoral et al., “Continual occlusion and optical flow estimation,” in ACCV,
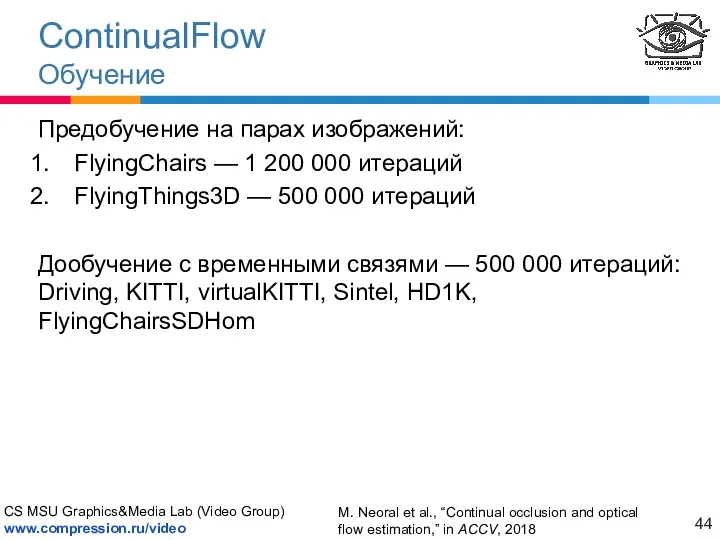
- 44. ContinualFlow Обучение M. Neoral et al., “Continual occlusion and optical flow estimation,” in ACCV, 2018 Предобучение
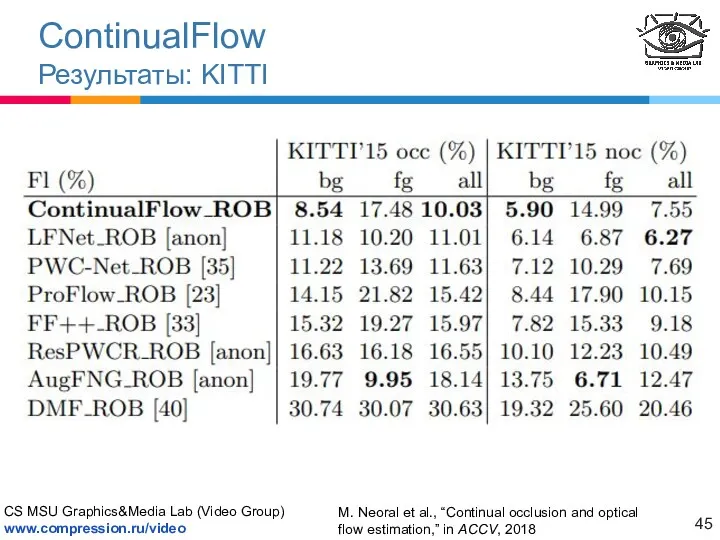
- 45. ContinualFlow Результаты: KITTI M. Neoral et al., “Continual occlusion and optical flow estimation,” in ACCV, 2018
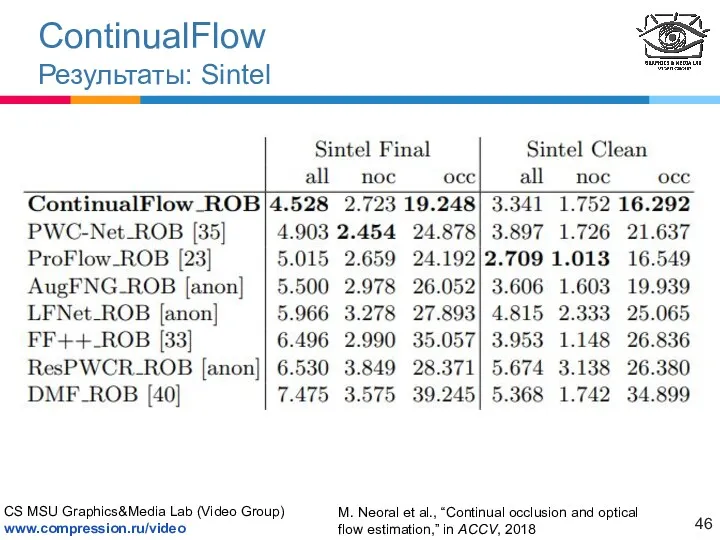
- 46. ContinualFlow Результаты: Sintel M. Neoral et al., “Continual occlusion and optical flow estimation,” in ACCV, 2018
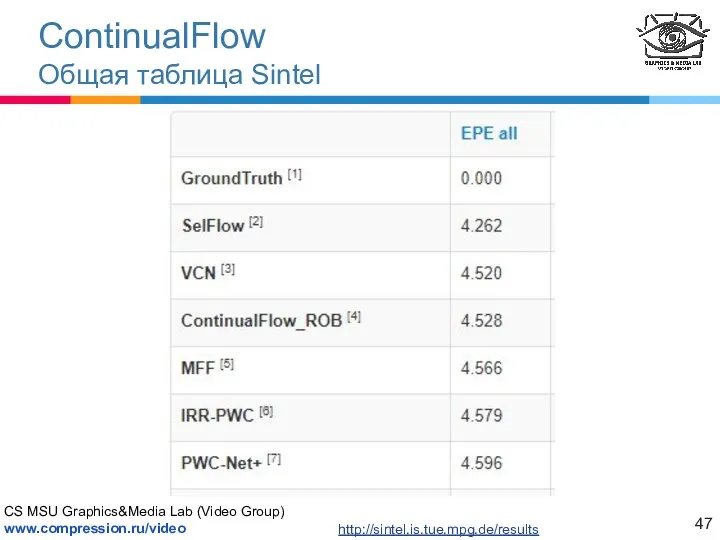
- 47. ContinualFlow Общая таблица Sintel http://sintel.is.tue.mpg.de/results
- 48. ContinualFlow Выводы Достоинства: Первый метод обучения с учителем, успешно использовавший более 2 кадров Один из лучших
- 49. Содержание Введение Методы поиска областей открытия/закрытия Методы поиска оптического потока MFF PWC-Net+ Заключение
- 50. MFF Суть метода (1) Z. Ren et al., “A fusion approach for multi-frame optical flow estimation,”
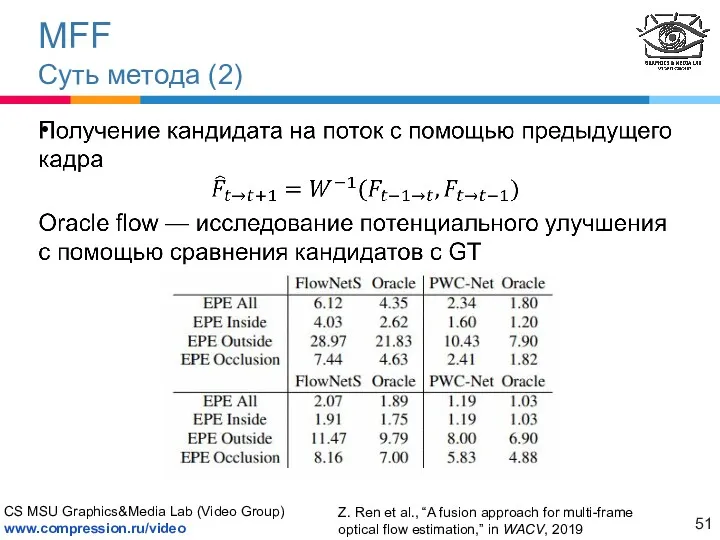
- 51. MFF Суть метода (2) Z. Ren et al., “A fusion approach for multi-frame optical flow estimation,”
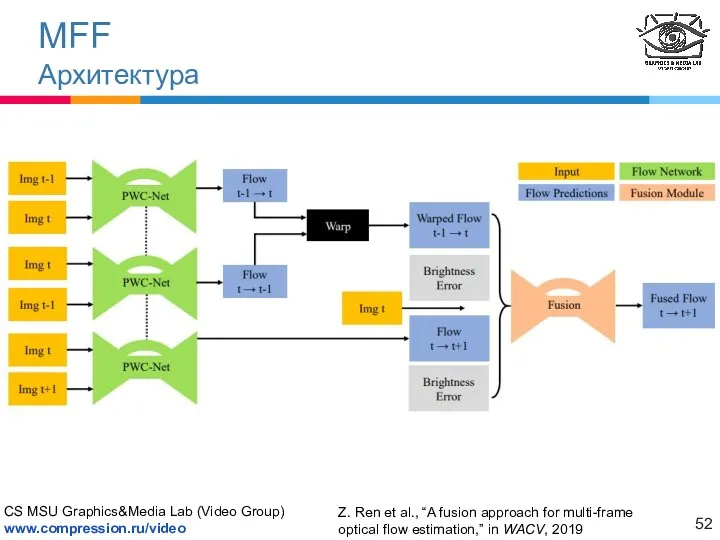
- 52. MFF Архитектура Z. Ren et al., “A fusion approach for multi-frame optical flow estimation,” in WACV,
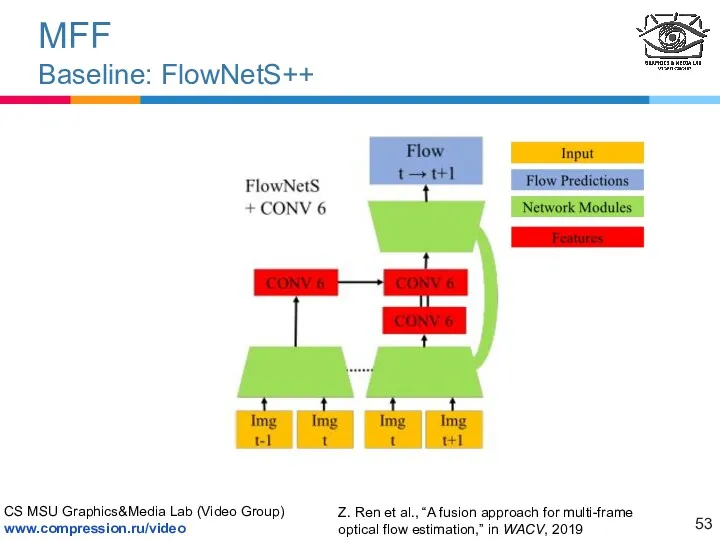
- 53. MFF Baseline: FlowNetS++ Z. Ren et al., “A fusion approach for multi-frame optical flow estimation,” in
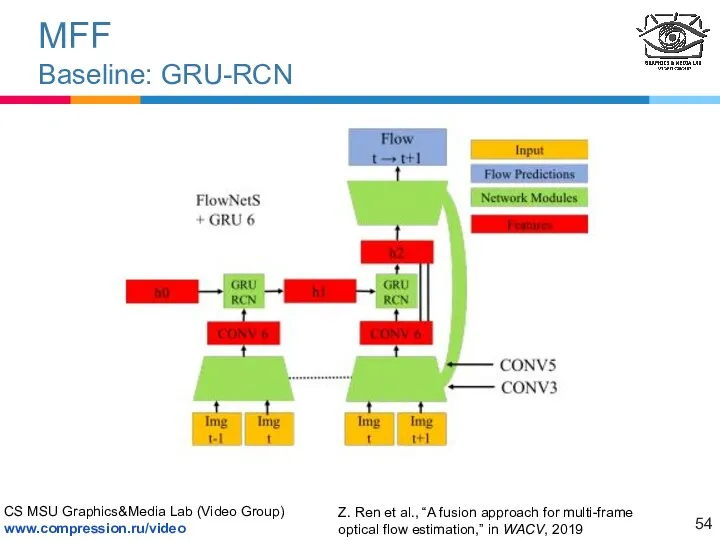
- 54. MFF Baseline: GRU-RCN Z. Ren et al., “A fusion approach for multi-frame optical flow estimation,” in
- 55. MFF Обучение Z. Ren et al., “A fusion approach for multi-frame optical flow estimation,” in WACV,
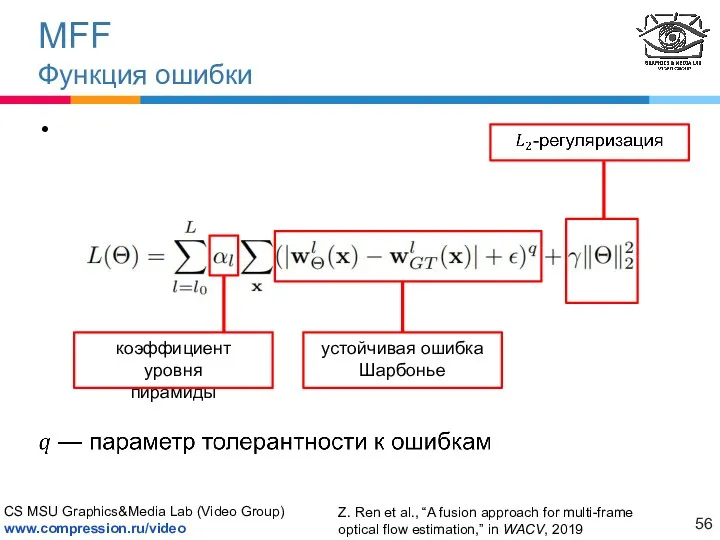
- 56. MFF Функция ошибки Z. Ren et al., “A fusion approach for multi-frame optical flow estimation,” in
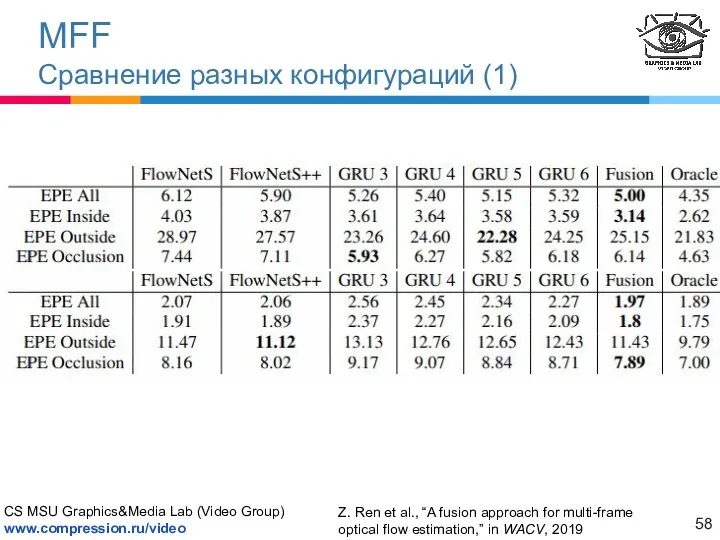
- 58. MFF Сравнение разных конфигураций (1) Z. Ren et al., “A fusion approach for multi-frame optical flow
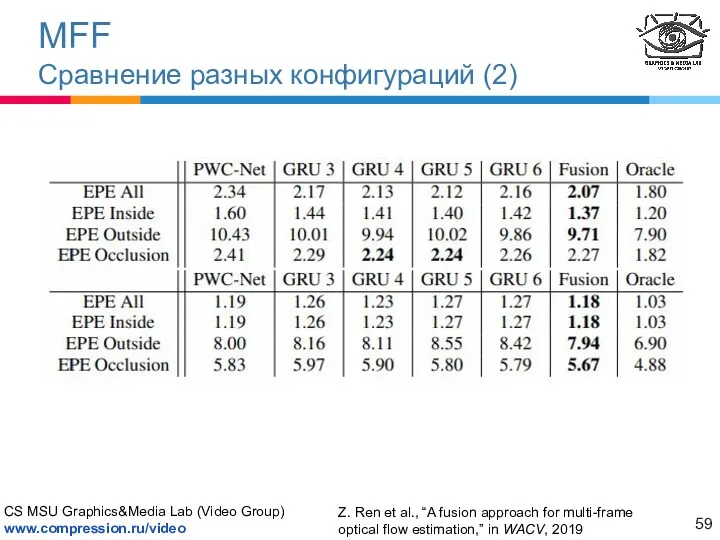
- 59. MFF Сравнение разных конфигураций (2) Z. Ren et al., “A fusion approach for multi-frame optical flow
- 60. MFF Выводы Достоинства: Один из лучших методов по оптическому потоку Простая идея, общий метод Выложены скрипты
- 61. Содержание Введение Методы поиска областей открытия/закрытия Методы поиска оптического потока MFF PWC-Net+ Заключение
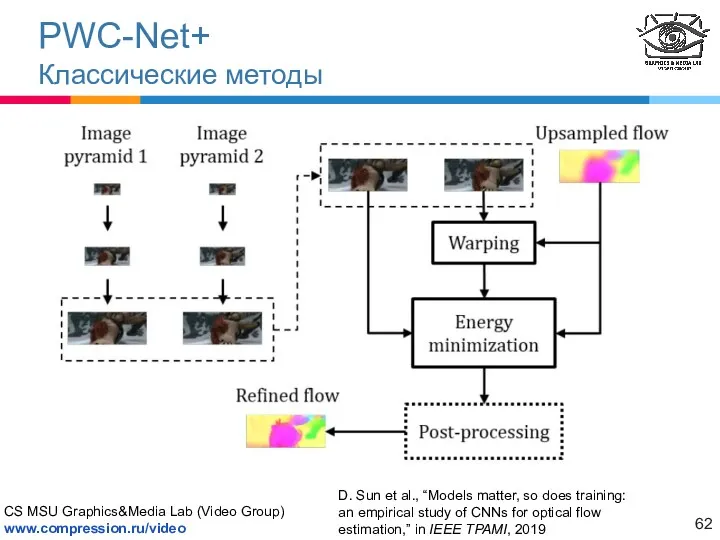
- 62. PWC-Net+ Классические методы D. Sun et al., “Models matter, so does training: an empirical study of
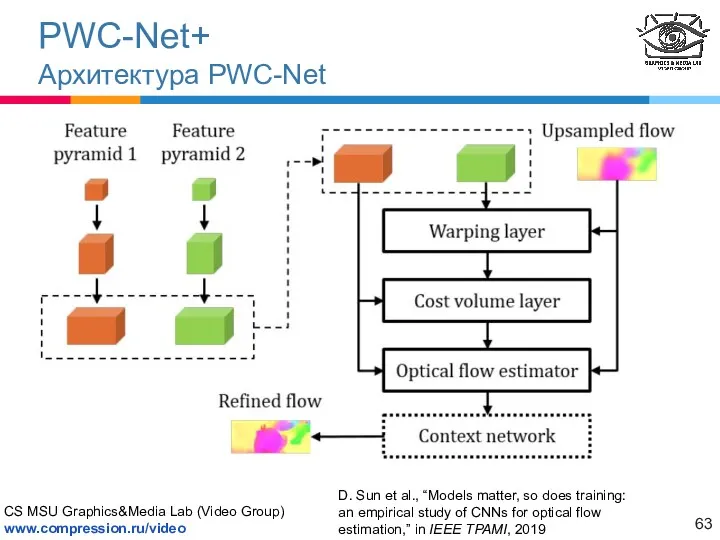
- 63. PWC-Net+ Архитектура PWC-Net D. Sun et al., “Models matter, so does training: an empirical study of
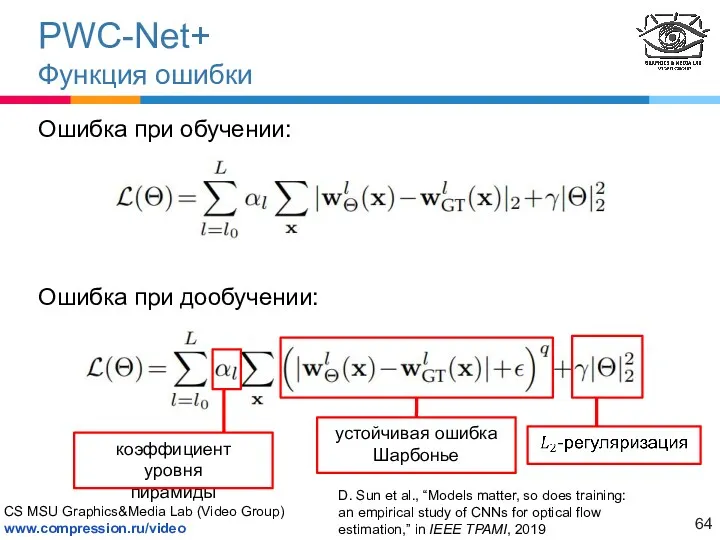
- 64. PWC-Net+ Функция ошибки D. Sun et al., “Models matter, so does training: an empirical study of
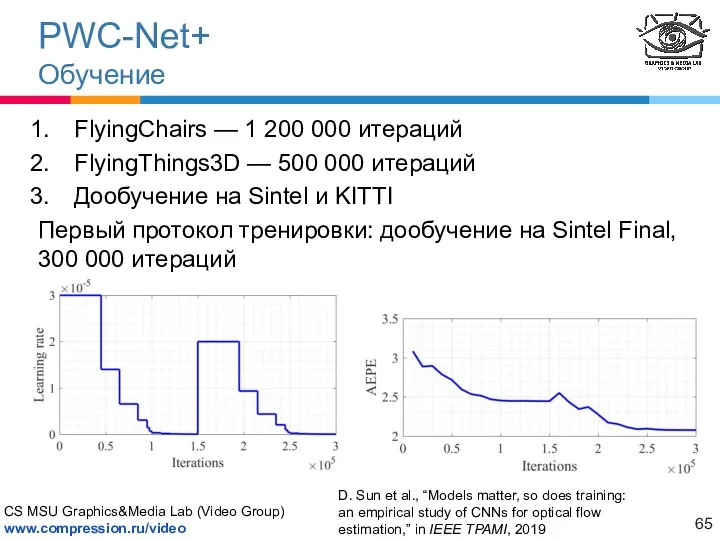
- 65. PWC-Net+ Обучение D. Sun et al., “Models matter, so does training: an empirical study of CNNs
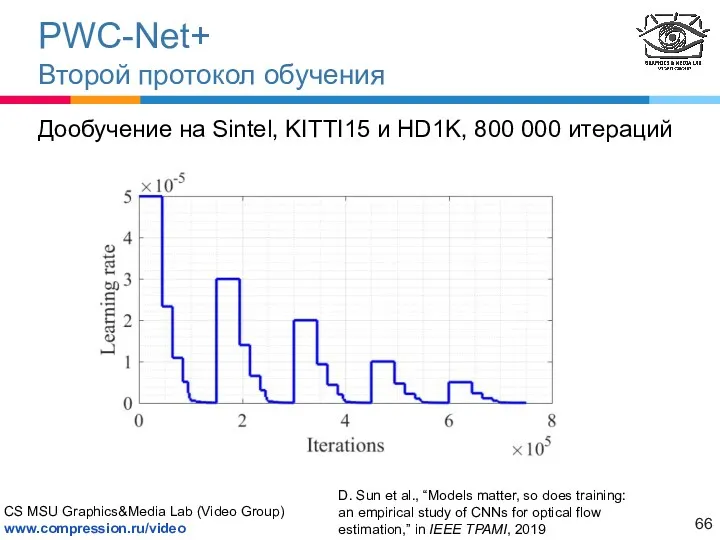
- 66. PWC-Net+ Второй протокол обучения Дообучение на Sintel, KITTI15 и HD1K, 800 000 итераций D. Sun et
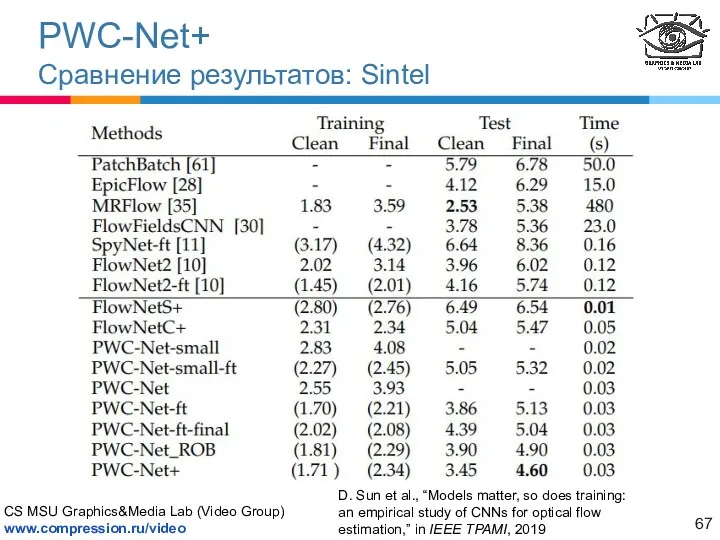
- 67. PWC-Net+ Сравнение результатов: Sintel D. Sun et al., “Models matter, so does training: an empirical study
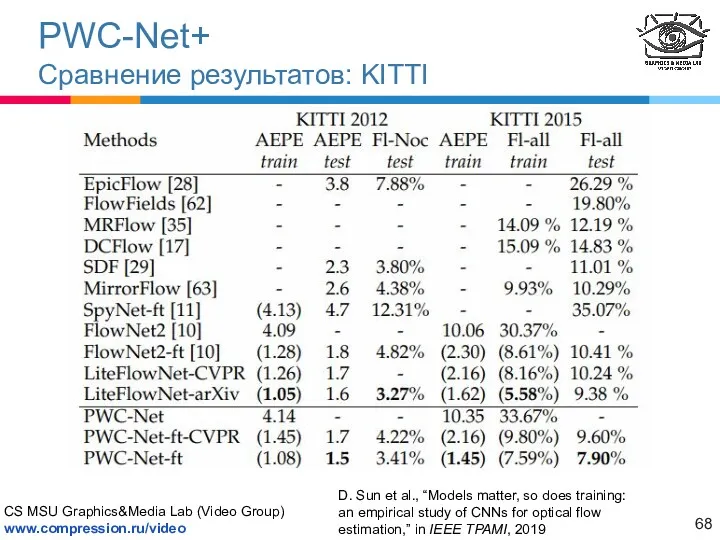
- 68. PWC-Net+ Сравнение результатов: KITTI D. Sun et al., “Models matter, so does training: an empirical study
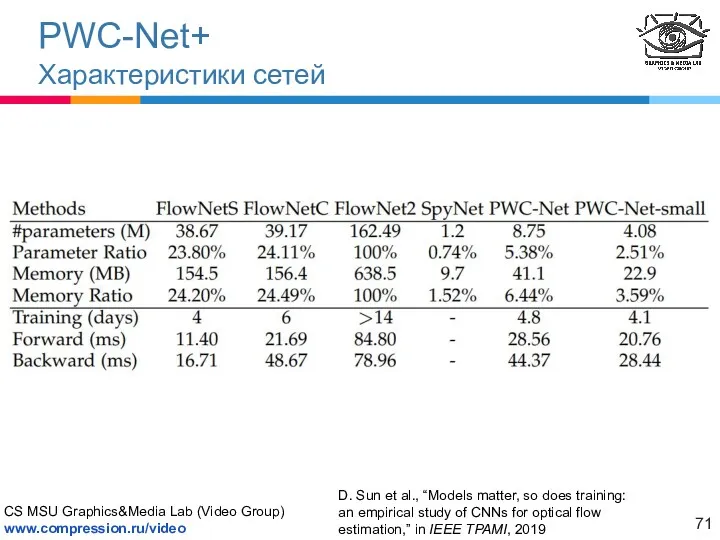
- 71. PWC-Net+ Характеристики сетей D. Sun et al., “Models matter, so does training: an empirical study of
- 72. PWC-Net+ Выводы Достоинства: Авторы провели подробное исследование производительности PWC-Net для различных способов обучения, улучшили свой предыдущий
- 73. Содержание Введение Методы поиска областей открытия/закрытия Методы поиска оптического потока Заключение
- 74. Заключение Методы поиска областей о/з
- 75. Заключение В докладе были рассмотрены: Методы одновременного вычисления областей открытия/закрытия и оптического потока Способы улучшения уже
- 76. Планы Использование методов улучшения поиска оптического потока для поиска областей открытия/закрытия Разработать метод поиска областей открытия/закрытия
- 78. Скачать презентацию
Содержание
Введение
Методы поиска областей открытия/закрытия
Методы построения оптического потока
Заключение
Содержание
Введение
Методы поиска областей открытия/закрытия
Методы построения оптического потока
Заключение
Введение
Оптический поток
A. Dosovitskiy et al., “FlowNet: Learning optical flow with convolutional
Введение
Оптический поток
A. Dosovitskiy et al., “FlowNet: Learning optical flow with convolutional
Введение
Области открытия/закрытия
https://github.com/visinf/irr
видео
оптический поток
области открытия/закрытия
Введение
Области открытия/закрытия
https://github.com/visinf/irr
видео
оптический поток
области открытия/закрытия
Введение
FlowNet — encoder
A. Dosovitskiy et al., “FlowNet: learning optical flow with
Введение
FlowNet — encoder
A. Dosovitskiy et al., “FlowNet: learning optical flow with
Введение
FlowNet — decoder
A. Dosovitskiy et al., “FlowNet: learning optical flow with
Введение
FlowNet — decoder
A. Dosovitskiy et al., “FlowNet: learning optical flow with
Введение
PWC-Net (1)
D. Sun et al., “Models matter, so does training:
an empirical
Введение
PWC-Net (1)
D. Sun et al., “Models matter, so does training: an empirical
Введение
PWC-Net (2)
D. Sun et al., “PWC-Net: CNNs for optical flow using
Введение
PWC-Net (2)
D. Sun et al., “PWC-Net: CNNs for optical flow using
Содержание
Введение
Методы поиска областей открытия/закрытия
IRR-PWC
FlowNet-CSSR
ContinualFlow
Методы поиска оптического потока
Заключение
Содержание
Введение
Методы поиска областей открытия/закрытия
IRR-PWC
FlowNet-CSSR
ContinualFlow
Методы поиска оптического потока
Заключение
IRR-PWC
Суть метода
Прогоняют поток через одну и ту же сеть несколько раз,
IRR-PWC
Суть метода
Прогоняют поток через одну и ту же сеть несколько раз,
IRR-PWC
Общая архитектура
H. Junhwa and S. Roth, “Iterative residual refinement for joint
IRR-PWC
Общая архитектура
H. Junhwa and S. Roth, “Iterative residual refinement for joint
IRR-PWC
Применение IRR к FlowNetS
H. Junhwa and S. Roth, “Iterative residual refinement
IRR-PWC
Применение IRR к FlowNetS
H. Junhwa and S. Roth, “Iterative residual refinement
IRR-PWC
Дополнительные улучшения
H. Junhwa and S. Roth, “Iterative residual refinement for joint
IRR-PWC
Дополнительные улучшения
H. Junhwa and S. Roth, “Iterative residual refinement for joint
IRR-PWC
Увеличение разрешения областей о/з
H. Junhwa and S. Roth, “Iterative residual refinement
IRR-PWC
Увеличение разрешения областей о/з
H. Junhwa and S. Roth, “Iterative residual refinement
IRR-PWC
Применение к PWC-Net (1)
H. Junhwa and S. Roth, “Iterative residual refinement
IRR-PWC
Применение к PWC-Net (1)
H. Junhwa and S. Roth, “Iterative residual refinement
IRR-PWC
Применение к PWC-Net (2)
H. Junhwa and S. Roth, “Iterative residual refinement
IRR-PWC
Применение к PWC-Net (2)
H. Junhwa and S. Roth, “Iterative residual refinement
IRR-PWC
Функция ошибки (1)
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
Функция ошибки (1)
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
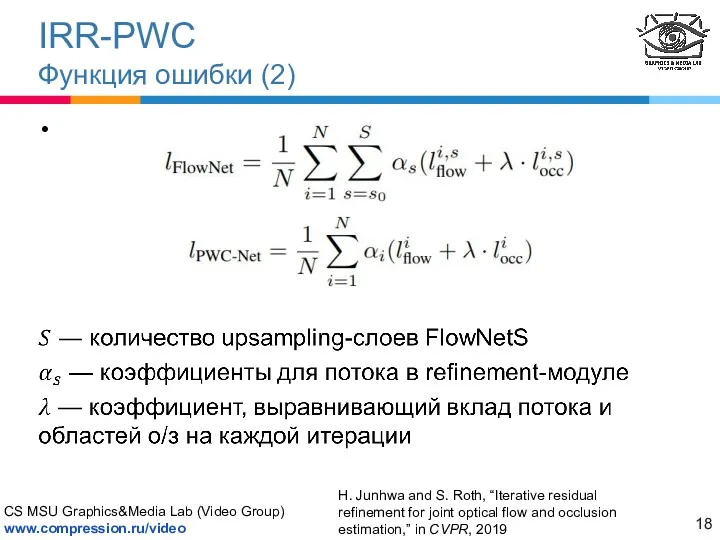
Функция ошибки (2)
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
Функция ошибки (2)
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
Обучение
H. Junhwa and S. Roth, “Iterative residual refinement for joint optical
IRR-PWC
Обучение
H. Junhwa and S. Roth, “Iterative residual refinement for joint optical
IRR-PWC
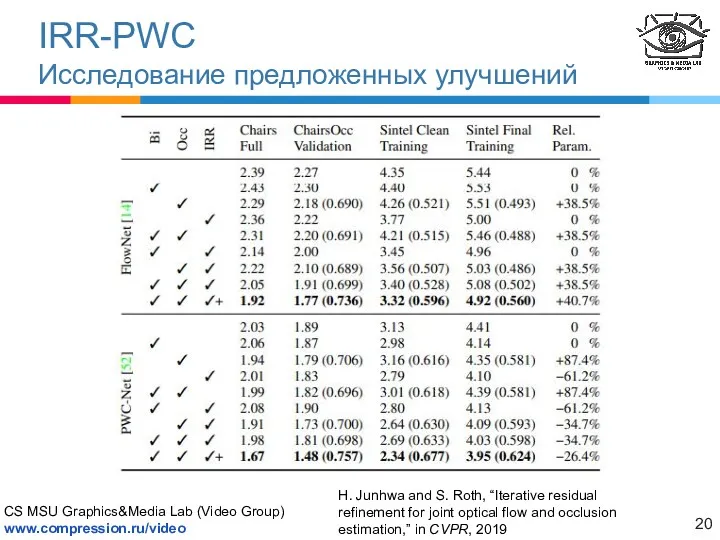
Исследование предложенных улучшений
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
Исследование предложенных улучшений
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
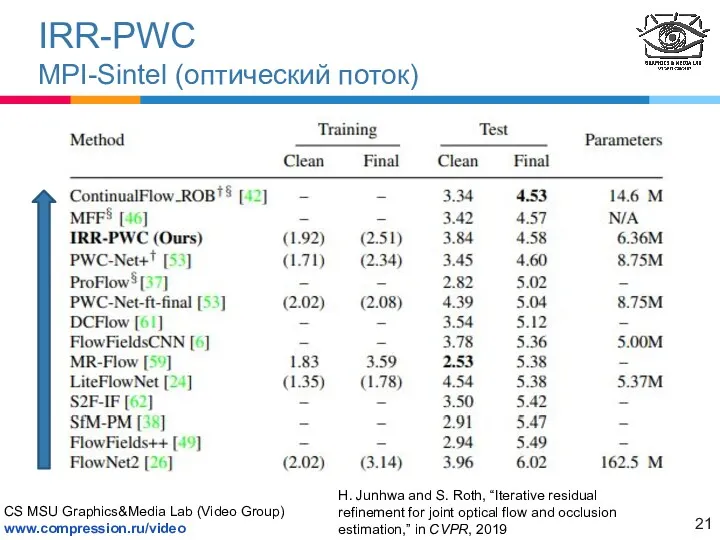
MPI-Sintel (оптический поток)
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
MPI-Sintel (оптический поток)
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
MPI-Sintel (области открытия/закрытия)
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
MPI-Sintel (области открытия/закрытия)
H. Junhwa and S. Roth, “Iterative residual refinement for
IRR-PWC
Выводы
Достоинства:
Один из лучших по качеству оптического потока
Лучший по качеству областей открытия/закрытия
Размер
IRR-PWC
Выводы
Достоинства:
Один из лучших по качеству оптического потока
Лучший по качеству областей открытия/закрытия
Размер
Содержание
Введение
Методы поиска областей открытия/закрытия
IRR-PWC
FlowNet-CSSR
ContinualFlow
Методы поиска оптического потока
Заключение
Содержание
Введение
Методы поиска областей открытия/закрытия
IRR-PWC
FlowNet-CSSR
ContinualFlow
Методы поиска оптического потока
Заключение
FlowNet-CSSR
Суть метода
Построение сети аналогично FlowNet 2.0
Вычисляют:
Оптический поток
Области о/з
Диспаритет
Границы объектов по движению
FlowNet-CSSR
Суть метода
Построение сети аналогично FlowNet 2.0
Вычисляют:
Оптический поток
Области о/з
Диспаритет
Границы объектов по движению
FlowNet-CSSR
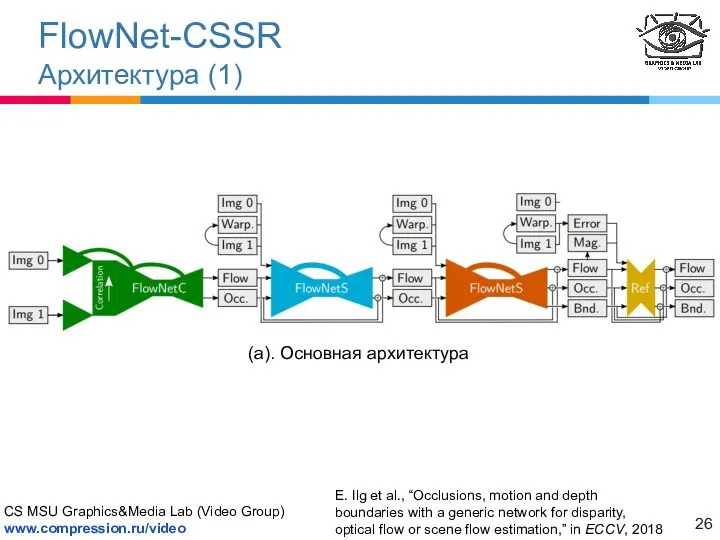
Архитектура (1)
(a). Основная архитектура
E. Ilg et al., “Occlusions, motion and depth
FlowNet-CSSR
Архитектура (1)
(a). Основная архитектура
E. Ilg et al., “Occlusions, motion and depth
FlowNet-CSSR
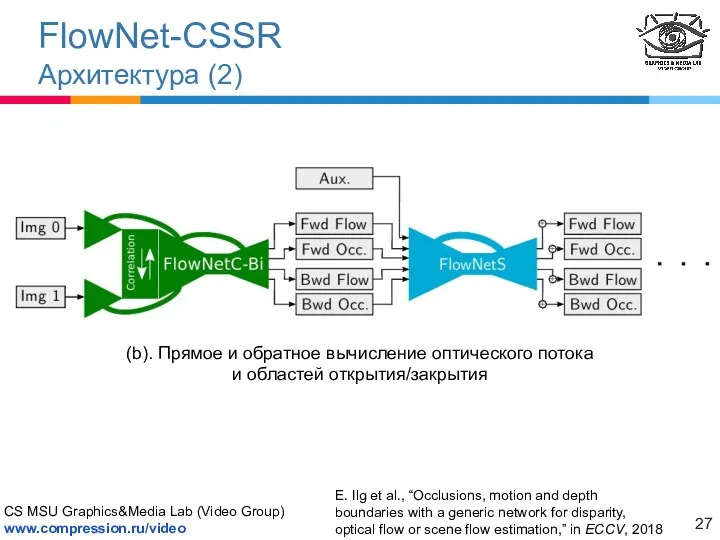
Архитектура (2)
(b). Прямое и обратное вычисление оптического потока
и областей открытия/закрытия
E. Ilg
FlowNet-CSSR
Архитектура (2)
(b). Прямое и обратное вычисление оптического потока
и областей открытия/закрытия
E. Ilg
FlowNet-CSSR
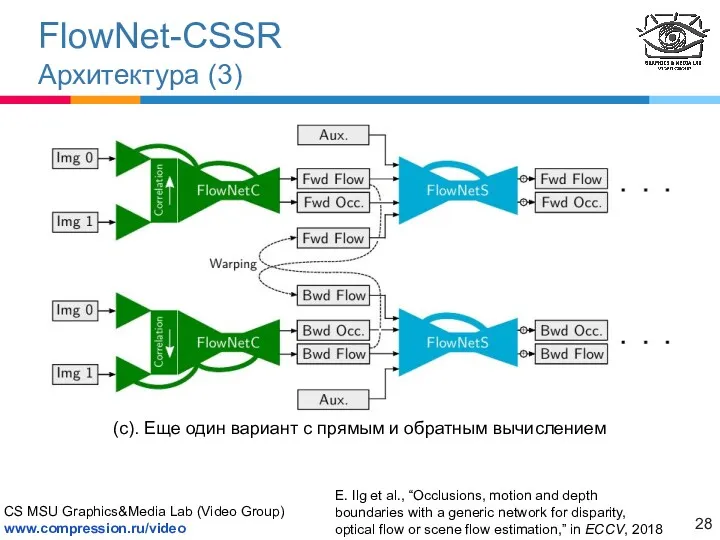
Архитектура (3)
(c). Еще один вариант с прямым и обратным вычислением
E. Ilg
FlowNet-CSSR
Архитектура (3)
(c). Еще один вариант с прямым и обратным вычислением
E. Ilg
FlowNet-CSSR
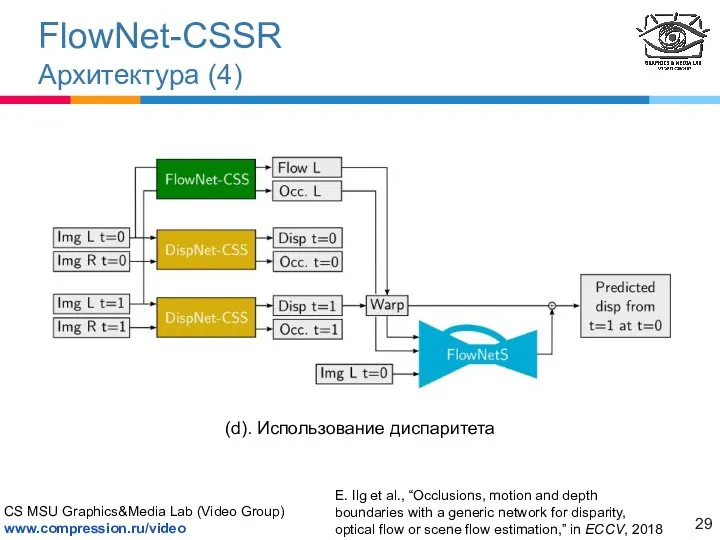
Архитектура (4)
(d). Использование диспаритета
E. Ilg et al., “Occlusions, motion and depth
FlowNet-CSSR
Архитектура (4)
(d). Использование диспаритета
E. Ilg et al., “Occlusions, motion and depth
FlowNet-CSSR
Обучение
Для каждой сети в стеке:
FlyingChairs — 600 000 итераций
FlyingThings3D — 250
FlowNet-CSSR
Обучение
Для каждой сети в стеке:
FlyingChairs — 600 000 итераций
FlyingThings3D — 250
FlowNet-CSSR
Исследование разных конфигураций метода
E. Ilg et al., “Occlusions, motion and depth
FlowNet-CSSR
Исследование разных конфигураций метода
E. Ilg et al., “Occlusions, motion and depth
FlowNet-CSSR
Сравнение методов: области о/з
FlowNet-CSSR
Сравнение методов: области о/з
FlowNet-CSSR
Сравнение методов: оптический поток
E. Ilg et al., “Occlusions, motion and depth
FlowNet-CSSR
Сравнение методов: оптический поток
E. Ilg et al., “Occlusions, motion and depth
FlowNet-CSSR
Выводы
Достоинства:
Универсальное решение многих задач
Лучший результат по областям о/з на момент публикации
FlowNet-CSSR
Выводы
Достоинства:
Универсальное решение многих задач
Лучший результат по областям о/з на момент публикации
Содержание
Введение
Методы поиска областей открытия/закрытия
IRR-PWC
FlowNet-CSSR
ContinualFlow
Методы поиска оптического потока
Заключение
Содержание
Введение
Методы поиска областей открытия/закрытия
IRR-PWC
FlowNet-CSSR
ContinualFlow
Методы поиска оптического потока
Заключение
ContinualFlow
PWC-Net + области открытия/закрытия
M. Neoral et al., “Continual occlusion and optical
ContinualFlow
PWC-Net + области открытия/закрытия
M. Neoral et al., “Continual occlusion and optical
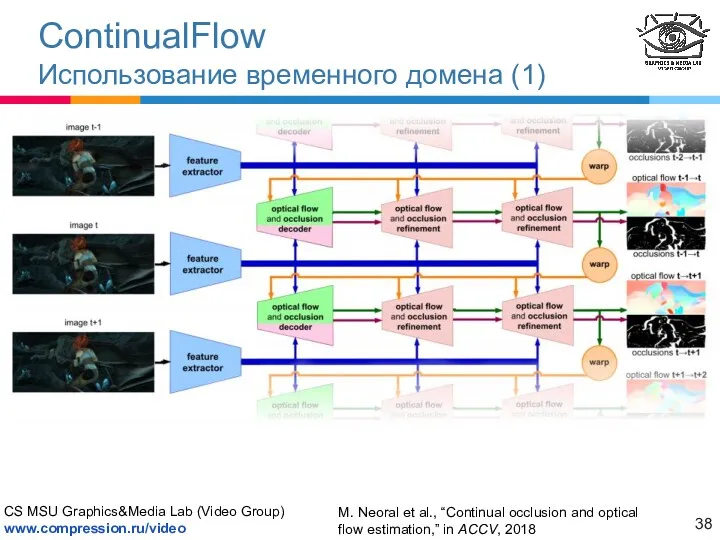
ContinualFlow
Использование временного домена (1)
M. Neoral et al., “Continual occlusion and optical
ContinualFlow
Использование временного домена (1)
M. Neoral et al., “Continual occlusion and optical
ContinualFlow
Использование временного домена (2)
M. Neoral et al., “Continual occlusion and optical
ContinualFlow
Использование временного домена (2)
M. Neoral et al., “Continual occlusion and optical
ContinualFlow
Сравнение различных конфигураций
M. Neoral et al., “Continual occlusion and optical flow
ContinualFlow
Сравнение различных конфигураций
M. Neoral et al., “Continual occlusion and optical flow
ContinualFlow
Функция ошибки: оптический поток
M. Neoral et al., “Continual occlusion and optical
ContinualFlow
Функция ошибки: оптический поток
M. Neoral et al., “Continual occlusion and optical
ContinualFlow
Функция ошибки: области о/з
M. Neoral et al., “Continual occlusion and optical
ContinualFlow
Функция ошибки: области о/з
M. Neoral et al., “Continual occlusion and optical
ContinualFlow
Общая функция ошибки
M. Neoral et al., “Continual occlusion and optical flow
ContinualFlow
Общая функция ошибки
M. Neoral et al., “Continual occlusion and optical flow
ContinualFlow
Обучение
M. Neoral et al., “Continual occlusion and optical flow estimation,” in
ContinualFlow
Обучение
M. Neoral et al., “Continual occlusion and optical flow estimation,” in
ContinualFlow
Результаты: KITTI
M. Neoral et al., “Continual occlusion and optical flow estimation,”
ContinualFlow
Результаты: KITTI
M. Neoral et al., “Continual occlusion and optical flow estimation,”
ContinualFlow
Результаты: Sintel
M. Neoral et al., “Continual occlusion and optical flow estimation,”
ContinualFlow
Результаты: Sintel
M. Neoral et al., “Continual occlusion and optical flow estimation,”
ContinualFlow
Общая таблица Sintel
http://sintel.is.tue.mpg.de/results
ContinualFlow
Общая таблица Sintel
http://sintel.is.tue.mpg.de/results
ContinualFlow
Выводы
Достоинства:
Первый метод обучения с учителем, успешно использовавший более 2 кадров
Один из
ContinualFlow
Выводы
Достоинства:
Первый метод обучения с учителем, успешно использовавший более 2 кадров
Один из
Содержание
Введение
Методы поиска областей открытия/закрытия
Методы поиска оптического потока
MFF
PWC-Net+
Заключение
Содержание
Введение
Методы поиска областей открытия/закрытия
Методы поиска оптического потока
MFF
PWC-Net+
Заключение
MFF
Суть метода (1)
Z. Ren et al., “A fusion approach for multi-frame
MFF
Суть метода (1)
Z. Ren et al., “A fusion approach for multi-frame
MFF
Суть метода (2)
Z. Ren et al., “A fusion approach for multi-frame
MFF
Суть метода (2)
Z. Ren et al., “A fusion approach for multi-frame
MFF
Архитектура
Z. Ren et al., “A fusion approach for multi-frame optical flow
MFF
Архитектура
Z. Ren et al., “A fusion approach for multi-frame optical flow
MFF
Baseline: FlowNetS++
Z. Ren et al., “A fusion approach for multi-frame optical
MFF
Baseline: FlowNetS++
Z. Ren et al., “A fusion approach for multi-frame optical
MFF
Baseline: GRU-RCN
Z. Ren et al., “A fusion approach for multi-frame optical
MFF
Baseline: GRU-RCN
Z. Ren et al., “A fusion approach for multi-frame optical
MFF
Обучение
Z. Ren et al., “A fusion approach for multi-frame optical flow
MFF
Обучение
Z. Ren et al., “A fusion approach for multi-frame optical flow
MFF
Функция ошибки
Z. Ren et al., “A fusion approach for multi-frame optical
MFF
Функция ошибки
Z. Ren et al., “A fusion approach for multi-frame optical

MFF
Сравнение разных конфигураций (1)
Z. Ren et al., “A fusion approach for
MFF
Сравнение разных конфигураций (1)
Z. Ren et al., “A fusion approach for
MFF
Сравнение разных конфигураций (2)
Z. Ren et al., “A fusion approach for
MFF
Сравнение разных конфигураций (2)
Z. Ren et al., “A fusion approach for
MFF
Выводы
Достоинства:
Один из лучших методов по оптическому потоку
Простая идея, общий метод
Выложены скрипты
MFF
Выводы
Достоинства:
Один из лучших методов по оптическому потоку
Простая идея, общий метод
Выложены скрипты
Содержание
Введение
Методы поиска областей открытия/закрытия
Методы поиска оптического потока
MFF
PWC-Net+
Заключение
Содержание
Введение
Методы поиска областей открытия/закрытия
Методы поиска оптического потока
MFF
PWC-Net+
Заключение
PWC-Net+
Классические методы
D. Sun et al., “Models matter, so does training:
an empirical
PWC-Net+
Классические методы
D. Sun et al., “Models matter, so does training: an empirical
PWC-Net+
Архитектура PWC-Net
D. Sun et al., “Models matter, so does training:
an empirical
PWC-Net+
Архитектура PWC-Net
D. Sun et al., “Models matter, so does training: an empirical
PWC-Net+
Функция ошибки
D. Sun et al., “Models matter, so does training:
an empirical
PWC-Net+
Функция ошибки
D. Sun et al., “Models matter, so does training: an empirical
PWC-Net+
Обучение
D. Sun et al., “Models matter, so does training:
an empirical study
PWC-Net+
Обучение
D. Sun et al., “Models matter, so does training: an empirical study
PWC-Net+
Второй протокол обучения
Дообучение на Sintel, KITTI15 и HD1K, 800 000 итераций
D.
PWC-Net+
Второй протокол обучения
Дообучение на Sintel, KITTI15 и HD1K, 800 000 итераций
D.
PWC-Net+
Сравнение результатов: Sintel
D. Sun et al., “Models matter, so does training:
an
PWC-Net+
Сравнение результатов: Sintel
D. Sun et al., “Models matter, so does training: an
PWC-Net+
Сравнение результатов: KITTI
D. Sun et al., “Models matter, so does training:
an
PWC-Net+
Сравнение результатов: KITTI
D. Sun et al., “Models matter, so does training: an


PWC-Net+
Характеристики сетей
D. Sun et al., “Models matter, so does training:
an empirical
PWC-Net+
Характеристики сетей
D. Sun et al., “Models matter, so does training: an empirical
PWC-Net+
Выводы
Достоинства:
Авторы провели подробное исследование производительности PWC-Net для различных способов обучения, улучшили
PWC-Net+
Выводы
Достоинства:
Авторы провели подробное исследование производительности PWC-Net для различных способов обучения, улучшили
Содержание
Введение
Методы поиска областей открытия/закрытия
Методы поиска оптического потока
Заключение
Содержание
Введение
Методы поиска областей открытия/закрытия
Методы поиска оптического потока
Заключение

Заключение
Методы поиска областей о/з
Заключение
Методы поиска областей о/з
Заключение
В докладе были рассмотрены:
Методы одновременного вычисления областей открытия/закрытия и оптического потока
Способы
Заключение
В докладе были рассмотрены:
Методы одновременного вычисления областей открытия/закрытия и оптического потока
Способы
Планы
Использование методов улучшения поиска оптического потока для поиска областей открытия/закрытия
Разработать метод
Планы
Использование методов улучшения поиска оптического потока для поиска областей открытия/закрытия
Разработать метод
 Кодирование и обработка информации
Кодирование и обработка информации Обеспечение информационной безопасности посредством управления usb портами
Обеспечение информационной безопасности посредством управления usb портами Единицы измерения количества информации
Единицы измерения количества информации Тема 2. Основные элементы языка Паскаль
Тема 2. Основные элементы языка Паскаль Кодирование звуковой информации
Кодирование звуковой информации Работа с электронными таблицами в программе Microsoft Excel
Работа с электронными таблицами в программе Microsoft Excel Информационные ресурсы
Информационные ресурсы История языков программирования
История языков программирования PHP. Функции. Функции, определяемые пользователем
PHP. Функции. Функции, определяемые пользователем Структура книги
Структура книги Деректердің реляциялық моделі
Деректердің реляциялық моделі Стандарт-Н. Эффективность автоматизации Стандарт-Н
Стандарт-Н. Эффективность автоматизации Стандарт-Н Корпоративные системы электронного документооборота. Классификация систем электронного документооборота
Корпоративные системы электронного документооборота. Классификация систем электронного документооборота Алгоритм составления и отгадывания ребусов
Алгоритм составления и отгадывания ребусов Программно-конфигурируемые сети
Программно-конфигурируемые сети Решение задач с использованием ввода-вывода из файлов
Решение задач с использованием ввода-вывода из файлов Компонент Таймер
Компонент Таймер Колизей. 3D - прототипирование
Колизей. 3D - прототипирование Средства представления и записи алгоритмов. Блок – схемы.Виды алгоритмических структур. Линейный алгоритм
Средства представления и записи алгоритмов. Блок – схемы.Виды алгоритмических структур. Линейный алгоритм IP-адресация. Сети и системы телекоммуникаций
IP-адресация. Сети и системы телекоммуникаций Игровые персонажи Dota 2
Игровые персонажи Dota 2 Виртуализация сетевых функций (NFV)
Виртуализация сетевых функций (NFV) конкурсная работа по проведению акции Час Кода
конкурсная работа по проведению акции Час Кода Информационные технологии в индустрии полимеров.. Практическое занятие 5
Информационные технологии в индустрии полимеров.. Практическое занятие 5 Проект на тему:О чём может рассказать школьная библиотека
Проект на тему:О чём может рассказать школьная библиотека Викторина. Персональный Компьютер
Викторина. Персональный Компьютер Определение жизненного цикла программных средств
Определение жизненного цикла программных средств Интернациональный центр спасения детей от киберпреступлений. Киберпреступления: мошенничество в сети
Интернациональный центр спасения детей от киберпреступлений. Киберпреступления: мошенничество в сети