ОГЭ по информатике. Решение заданий 20.1 с помощью алгоритмического языка в среде Кумир. Исполнитель Робот презентация
- ОГЭ по информатике. Решение заданий 20.1 с помощью алгоритмического языка в среде Кумир. Исполнитель Робот

Содержание
- 2. Исполнитель Робот Исполнитель Робот умеет перемещаться по лабиринту, начерченному на плоскости, разбитой на клетки. Между соседними
- 3. Исполнитель Робот Также у Робота есть команда закрасить, при которой закрашивается клетка, в которой Робот находится
- 4. Исполнитель Робот Условие «если» имеет следующий вид: если условие то последовательность команд все Здесь условие –
- 5. Исполнитель Робот Например, для передвижения на одну клетку вправо, если справа нет стенки и закрашивания клетки,
- 6. Исполнитель Робот Для повторения последовательности команд можно использовать цикл «пока», имеющий следующий вид: нц пока условие
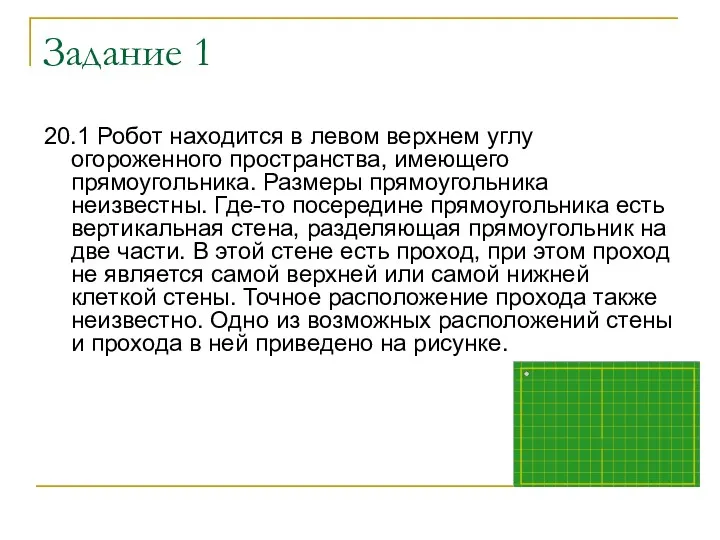
- 7. Задание 1 20.1 Робот находится в левом верхнем углу огороженного пространства, имеющего прямоугольника. Размеры прямоугольника неизвестны.
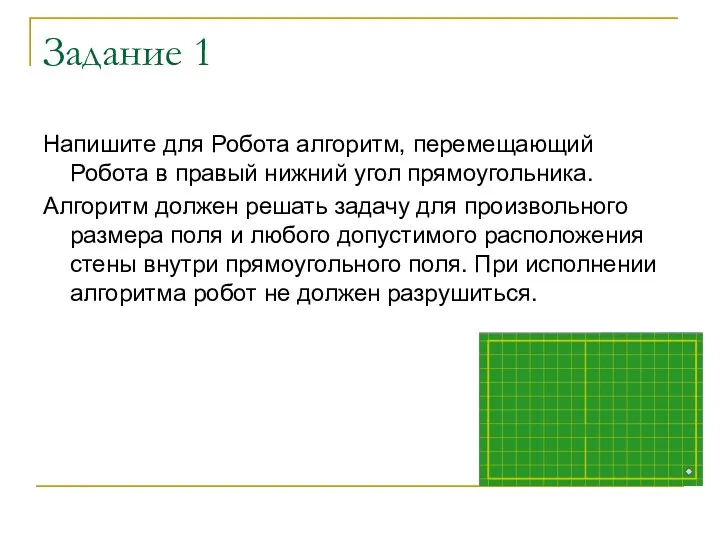
- 8. Задание 1 Напишите для Робота алгоритм, перемещающий Робота в правый нижний угол прямоугольника. Алгоритм должен решать
- 9. Задание 1 использовать Робот алг задание 1 нач нц пока справа свободно вправо кц нц пока
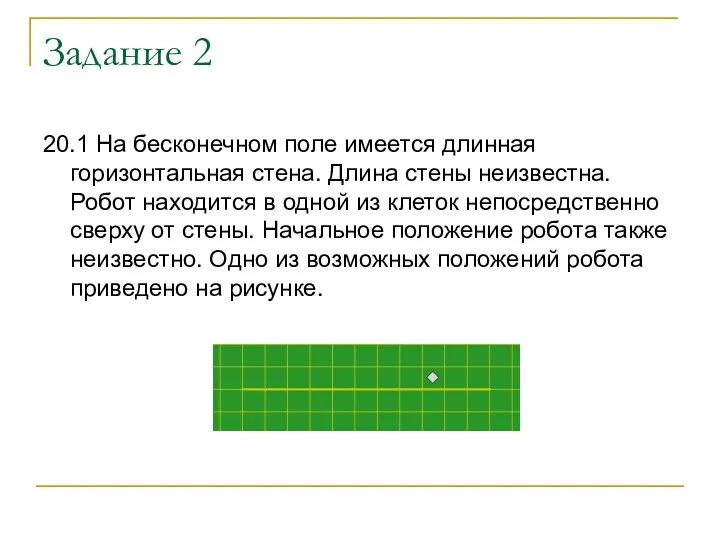
- 10. Задание 2 20.1 На бесконечном поле имеется длинная горизонтальная стена. Длина стены неизвестна. Робот находится в
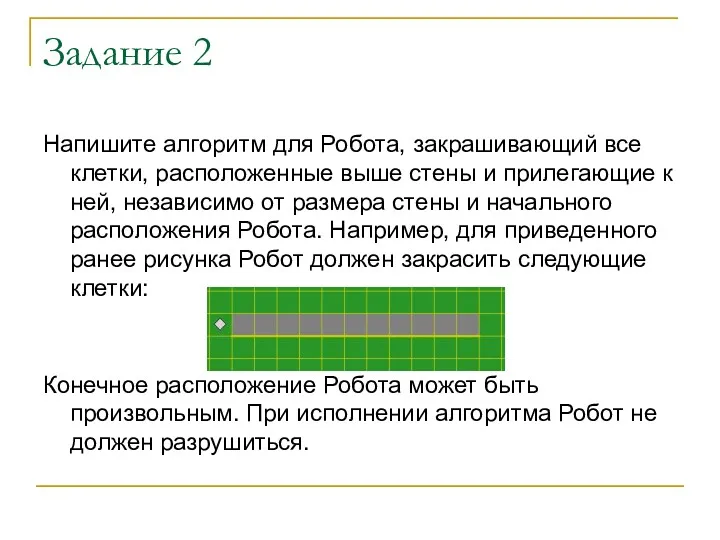
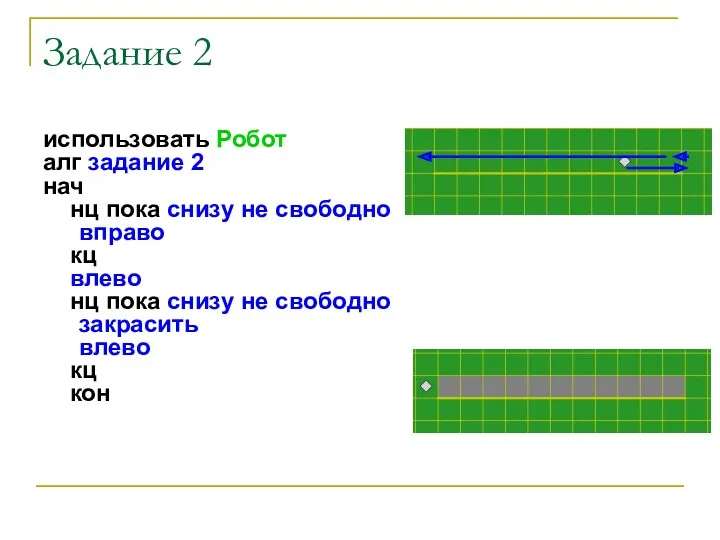
- 11. Задание 2 Напишите алгоритм для Робота, закрашивающий все клетки, расположенные выше стены и прилегающие к ней,
- 12. Задание 2 использовать Робот алг задание 2 нач нц пока снизу не свободно вправо кц влево
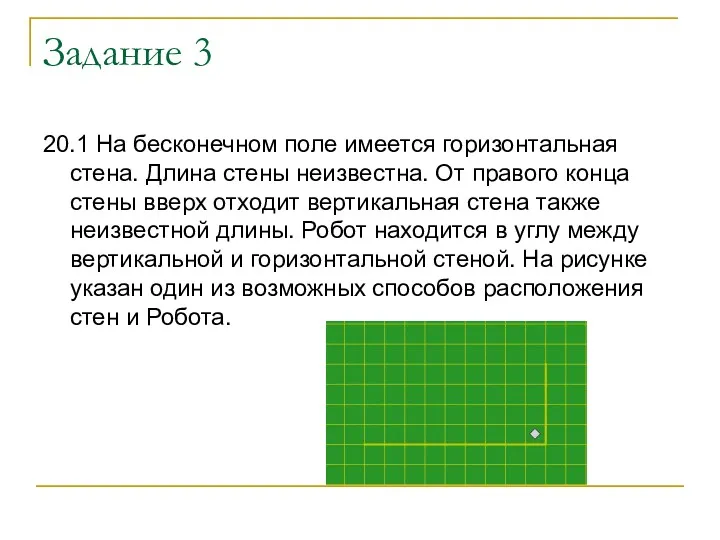
- 13. Задание 3 20.1 На бесконечном поле имеется горизонтальная стена. Длина стены неизвестна. От правого конца стены
- 14. Задание 3 Напишите алгоритм для Робота, закрашивающий все клетки, расположенные выше горизонтальной стены и левее вертикальной
- 16. Скачать презентацию
Исполнитель Робот
Исполнитель Робот умеет перемещаться по лабиринту, начерченному на плоскости, разбитой
Исполнитель Робот
Исполнитель Робот умеет перемещаться по лабиринту, начерченному на плоскости, разбитой
Исполнитель Робот
Также у Робота есть команда закрасить, при которой закрашивается клетка,
Исполнитель Робот
Также у Робота есть команда закрасить, при которой закрашивается клетка,

Исполнитель Робот
Условие «если» имеет следующий вид:
если условие то
последовательность команд
Исполнитель Робот
Условие «если» имеет следующий вид:
если условие то
последовательность команд
Исполнитель Робот
Например, для передвижения на одну клетку вправо, если справа нет
Исполнитель Робот
Например, для передвижения на одну клетку вправо, если справа нет
Исполнитель Робот
Для повторения последовательности команд можно использовать цикл «пока», имеющий следующий
Исполнитель Робот
Для повторения последовательности команд можно использовать цикл «пока», имеющий следующий
Задание 1
20.1 Робот находится в левом верхнем углу огороженного пространства, имеющего
Задание 1
20.1 Робот находится в левом верхнем углу огороженного пространства, имеющего
Задание 1
Напишите для Робота алгоритм, перемещающий Робота в правый нижний угол
Задание 1
Напишите для Робота алгоритм, перемещающий Робота в правый нижний угол

Задание 1
использовать Робот
алг задание 1
нач
нц пока справа свободно
вправо
кц
нц пока справа не
Задание 1
использовать Робот
алг задание 1
нач
нц пока справа свободно
вправо
кц
нц пока справа не
Задание 2
20.1 На бесконечном поле имеется длинная горизонтальная стена. Длина стены
Задание 2
20.1 На бесконечном поле имеется длинная горизонтальная стена. Длина стены
Задание 2
Напишите алгоритм для Робота, закрашивающий все клетки, расположенные выше стены
Задание 2
Напишите алгоритм для Робота, закрашивающий все клетки, расположенные выше стены
Задание 2
использовать Робот
алг задание 2
нач
нц пока снизу не свободно
вправо
кц
влево
нц пока снизу
Задание 2
использовать Робот
алг задание 2
нач
нц пока снизу не свободно
вправо
кц
влево
нц пока снизу
Задание 3
20.1 На бесконечном поле имеется горизонтальная стена. Длина стены неизвестна.
Задание 3
20.1 На бесконечном поле имеется горизонтальная стена. Длина стены неизвестна.

Задание 3
Напишите алгоритм для Робота, закрашивающий все клетки, расположенные выше горизонтальной
Задание 3
Напишите алгоритм для Робота, закрашивающий все клетки, расположенные выше горизонтальной
 Основы программирования в среде delphi. Сборник упражнений
Основы программирования в среде delphi. Сборник упражнений Локальная сеть
Локальная сеть Элементы криптографического анализа
Элементы криптографического анализа Дорогу осилит идущий, а информатику – мыслящий
Дорогу осилит идущий, а информатику – мыслящий Разведка Бараша. Эпизод 6
Разведка Бараша. Эпизод 6 Сложность алгоритма
Сложность алгоритма Комп’ютерна дискретна математика. Відношення та їх властивості. (Лекція 3)
Комп’ютерна дискретна математика. Відношення та їх властивості. (Лекція 3) ARM-процесори
ARM-процесори Ripple Maker
Ripple Maker Кодирование и обработка числовой информации 9 класс урок №4-5
Кодирование и обработка числовой информации 9 класс урок №4-5 Выбор расположения клиентской точки Wi Fi для лучшего покрытия сети
Выбор расположения клиентской точки Wi Fi для лучшего покрытия сети Введение в базы данных
Введение в базы данных Виды системного программного обеспечения
Виды системного программного обеспечения Таблицы. Базы данных
Таблицы. Базы данных Основные понятия информационной безопасности
Основные понятия информационной безопасности Алгоритм, свойства алгоритма, графическое описания и виды алгоритмов. Тема 1
Алгоритм, свойства алгоритма, графическое описания и виды алгоритмов. Тема 1 Создание презентаций в Microsoft PowerPoint
Создание презентаций в Microsoft PowerPoint Обработка информации. Информация и информационные процессы. Информатика. 10 класс
Обработка информации. Информация и информационные процессы. Информатика. 10 класс Электронная библиотека Национальной библиотеки Республики Саха (Якутия)
Электронная библиотека Национальной библиотеки Республики Саха (Якутия) Использование ИКТ на уроках истории и обществознания как средство повышения качества знаний учащихся
Использование ИКТ на уроках истории и обществознания как средство повышения качества знаний учащихся Цикл с параметром в языке Pascal
Цикл с параметром в языке Pascal Актуальные проблемы компьютерной безопасности и защиты информации
Актуальные проблемы компьютерной безопасности и защиты информации Методические рекомендации по запуску системы управления колледжем с использованием программного продукта 1С:Колледж
Методические рекомендации по запуску системы управления колледжем с использованием программного продукта 1С:Колледж Двумерные массивы
Двумерные массивы Системы счисления
Системы счисления Самодельный робот-манипулятор с дистанционным управлением
Самодельный робот-манипулятор с дистанционным управлением Основы Transact-SQL
Основы Transact-SQL Нейронные сети глубокого обучения
Нейронные сети глубокого обучения