- Основы программирования БЛА. Дополнительные модули. Взаимодействие БЛА и модулей

Содержание
- 2. Изучаемые вопросы Дополнительные модули БЛА Взаимодействие БЛА и модулей Программирование БЛА ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ
- 3. Цель занятия ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 4. Основные модули Пионера ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 5. Основные модули Пионера ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 6. Основные модули Пионера ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 7. Основные модули Пионера ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
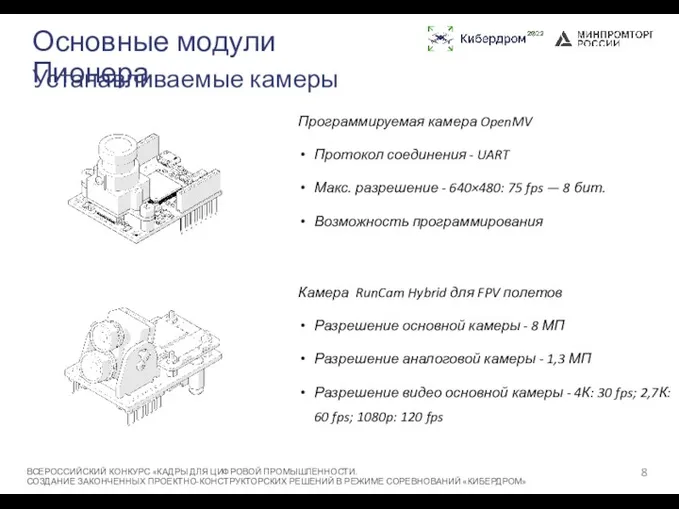
- 8. Основные модули Пионера ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
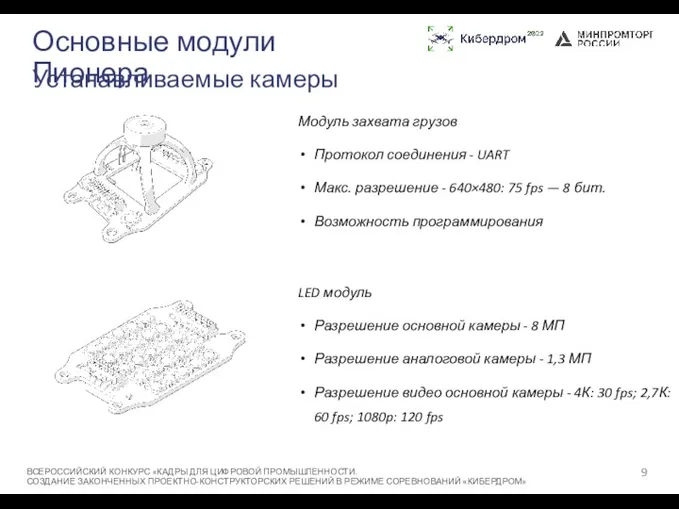
- 9. Основные модули Пионера ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 10. Программирование ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ» Для
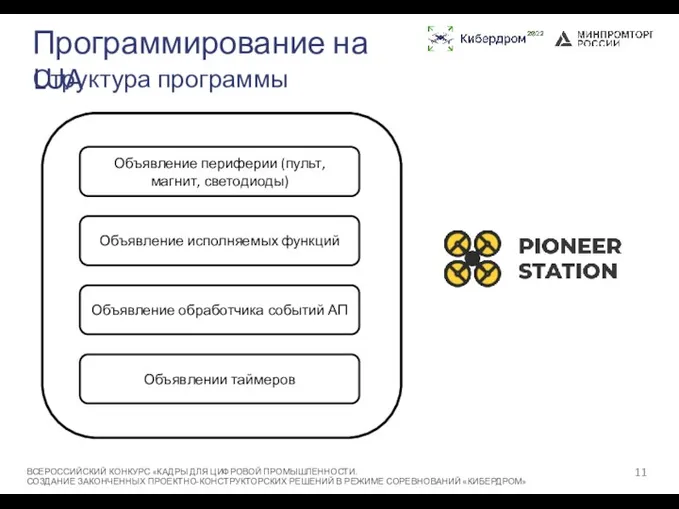
- 11. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
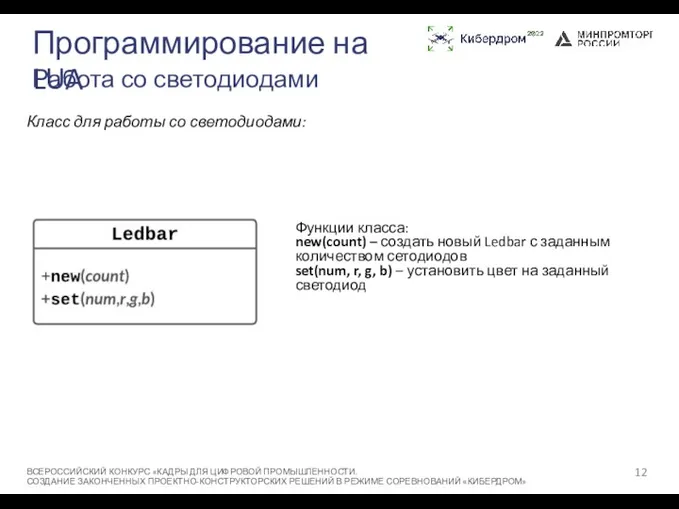
- 12. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
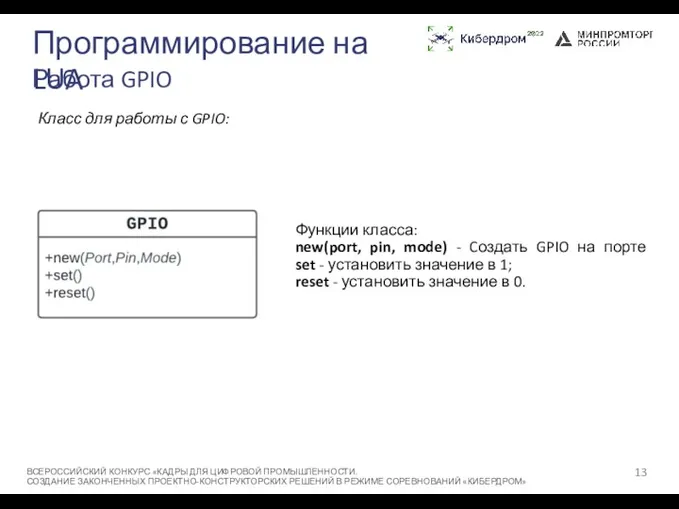
- 13. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
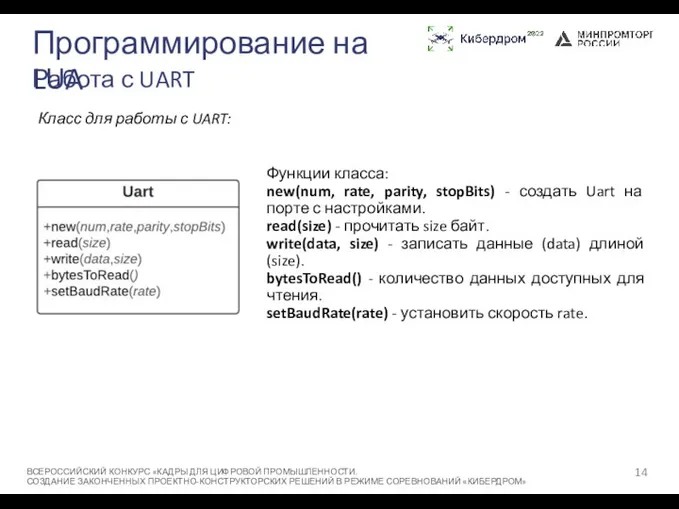
- 14. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 15. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
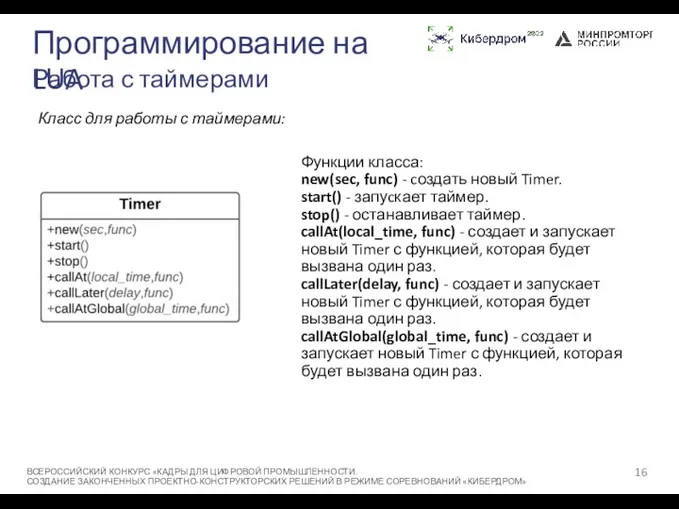
- 16. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
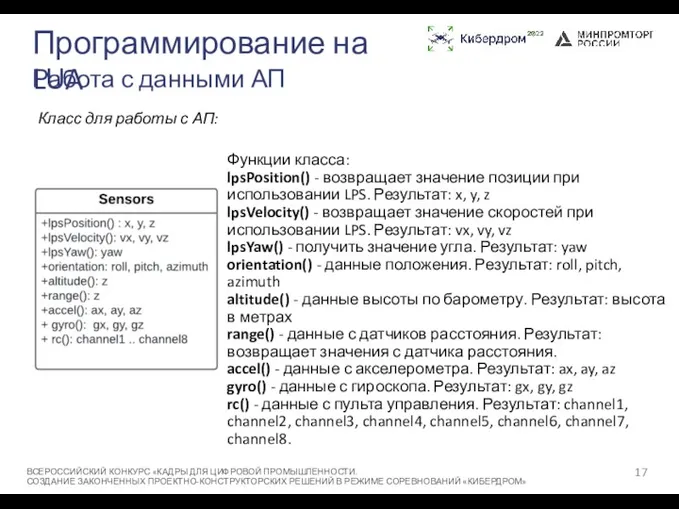
- 17. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
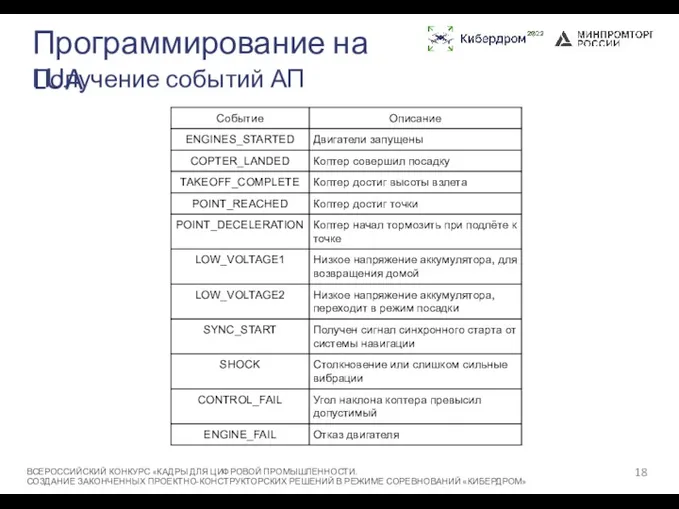
- 18. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
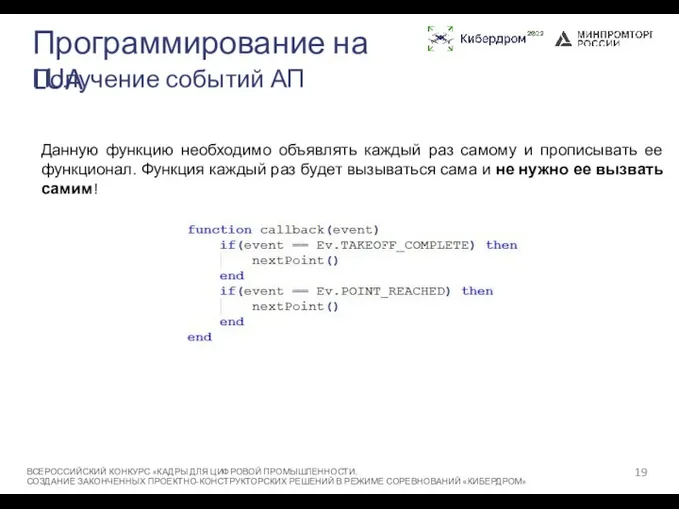
- 19. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
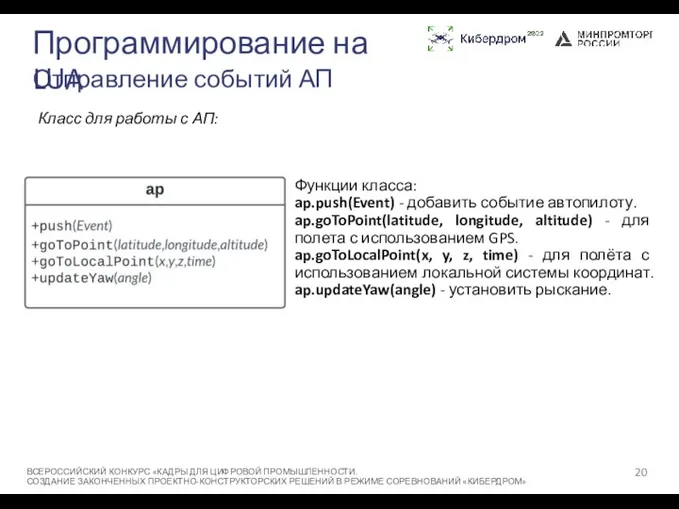
- 20. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
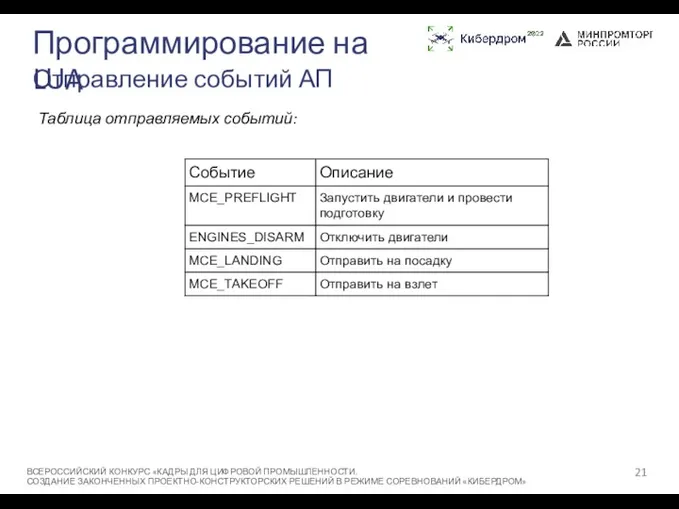
- 21. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
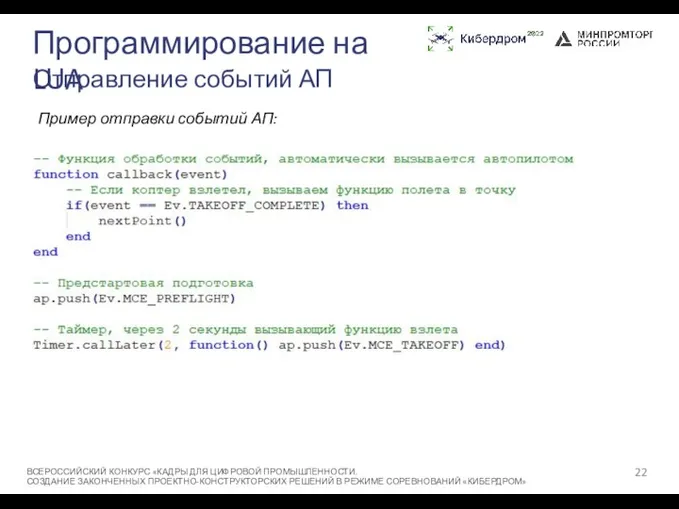
- 22. Программирование на LUA ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
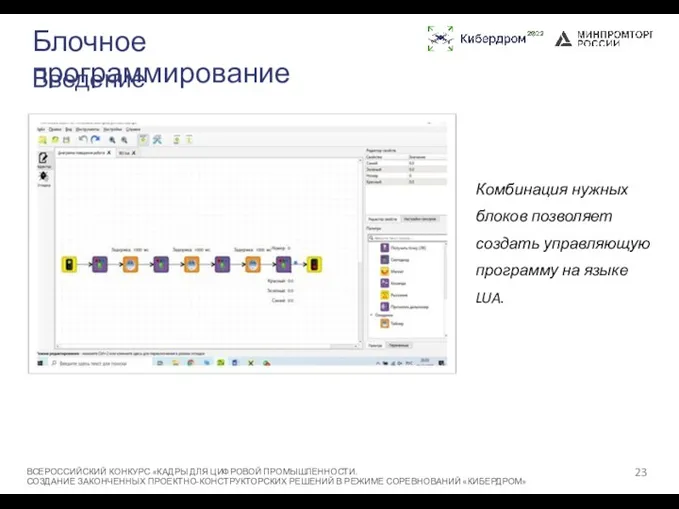
- 23. Блочное программирование ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
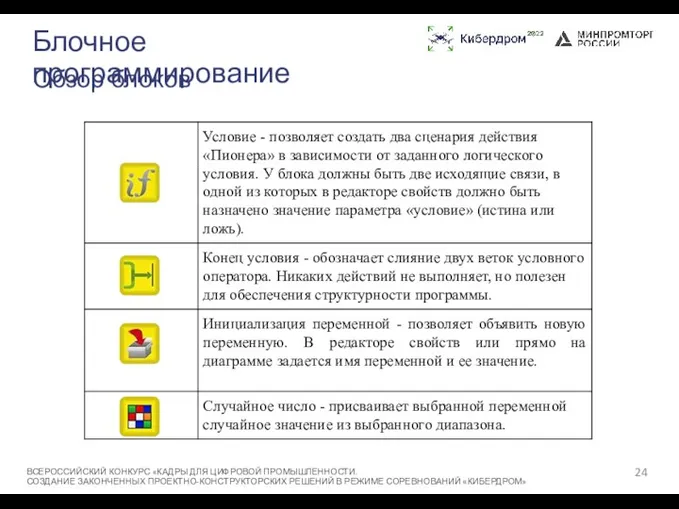
- 24. Блочное программирование ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
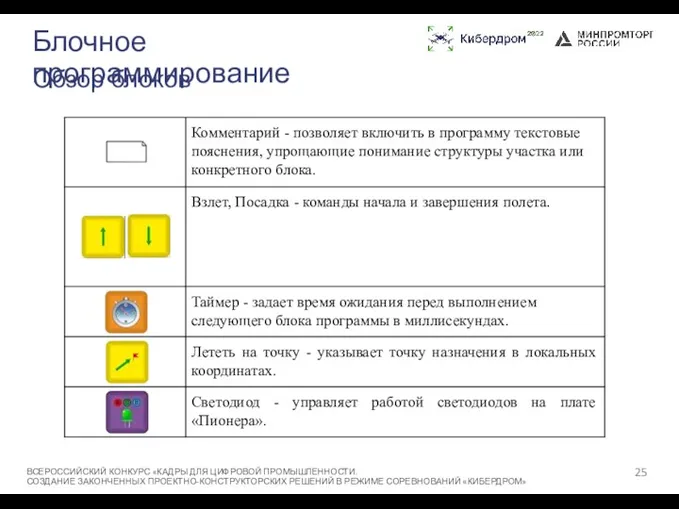
- 25. Блочное программирование ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
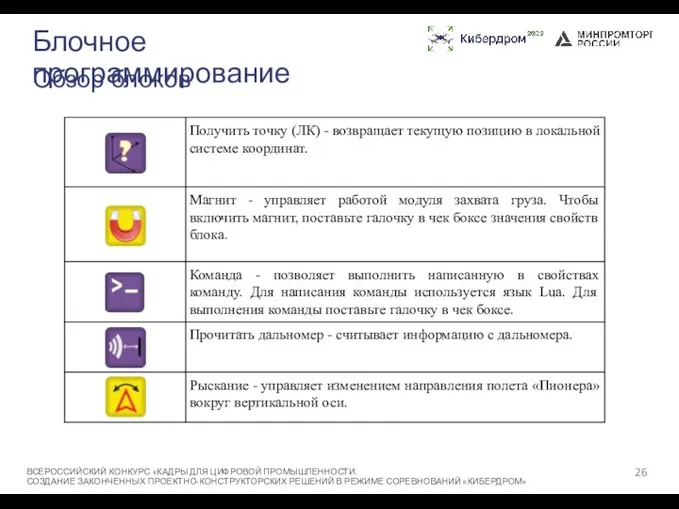
- 26. Блочное программирование ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
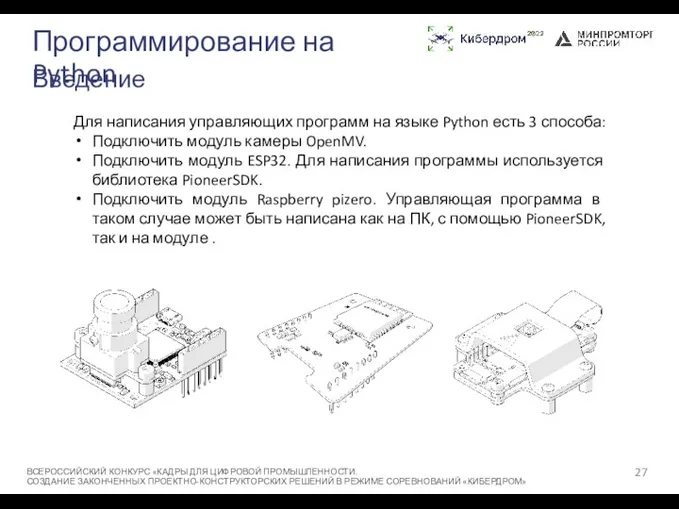
- 27. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 28. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 29. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
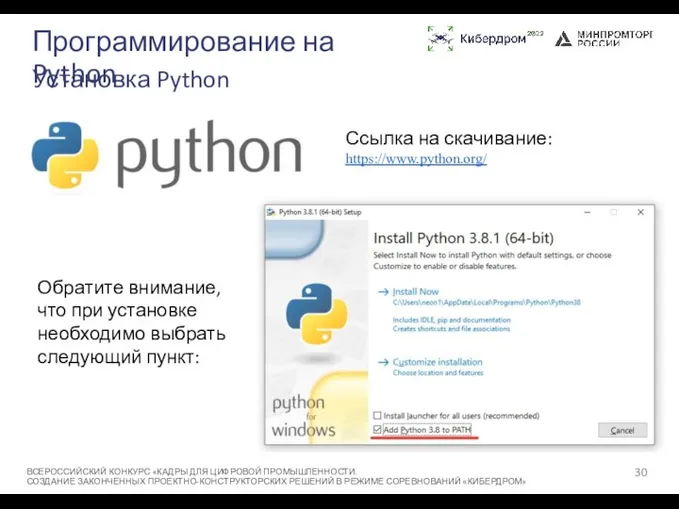
- 30. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
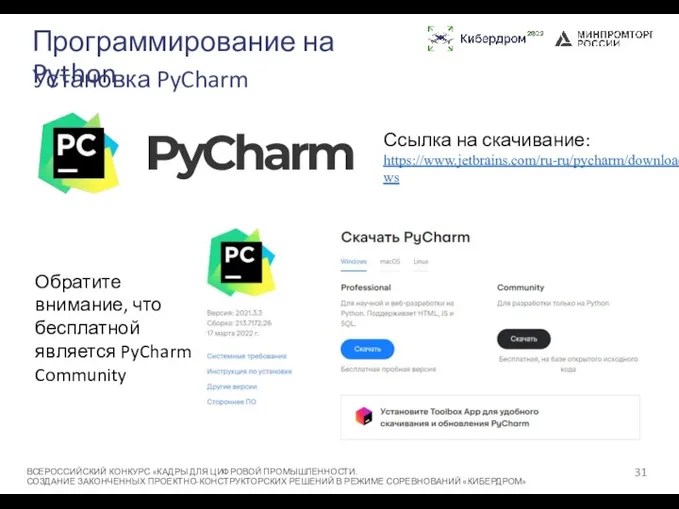
- 31. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 32. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
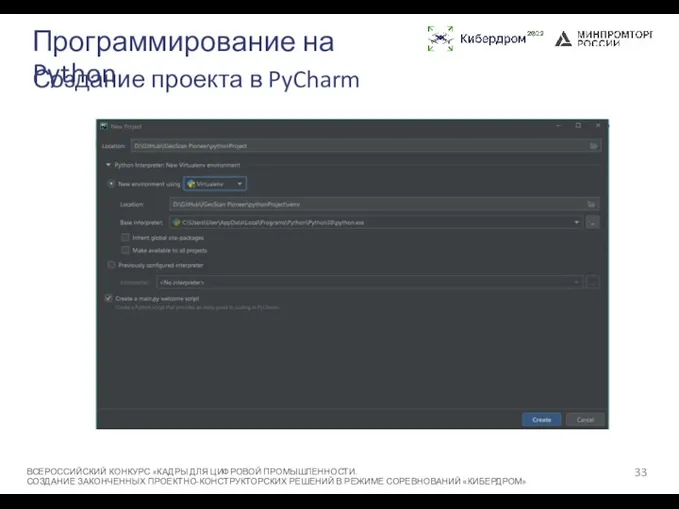
- 33. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
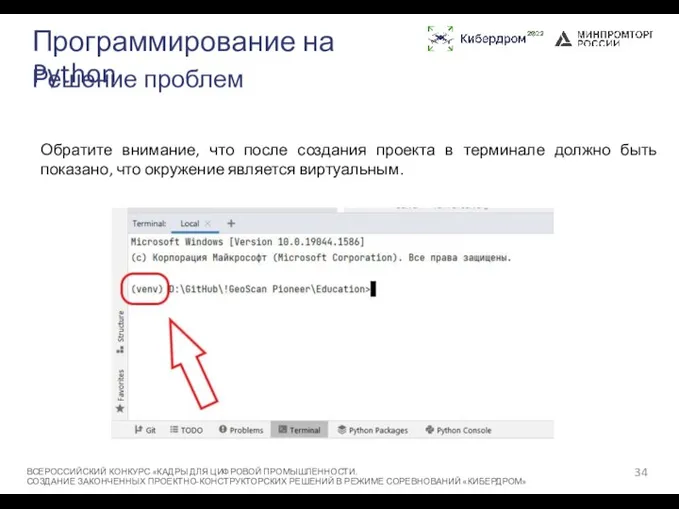
- 34. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
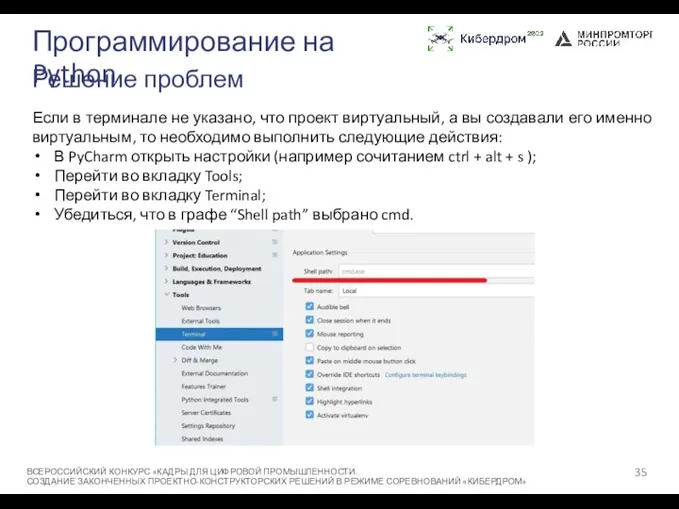
- 35. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
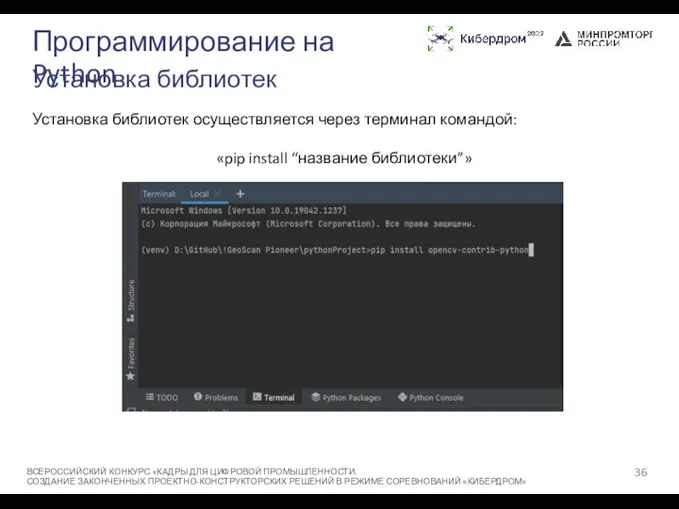
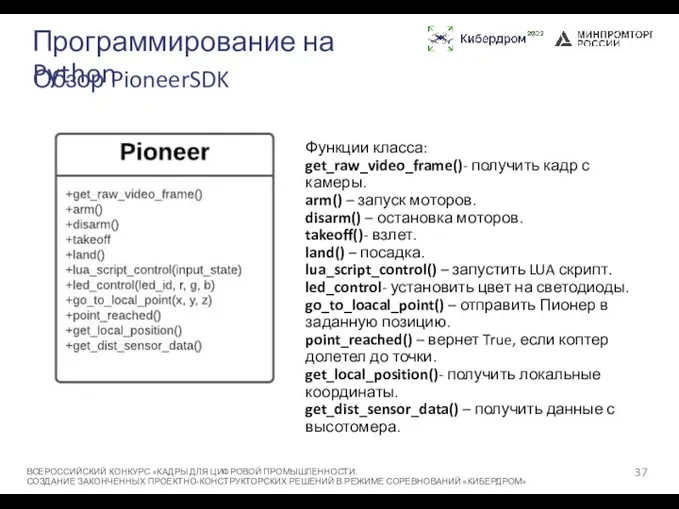
- 36. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 37. Программирование на Python ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 38. Вопросы для самоподготовки ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 39. Домашнее задание обязательно ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 41. Скачать презентацию
Изучаемые вопросы
Дополнительные модули БЛА
Взаимодействие БЛА и модулей
Программирование БЛА
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ
Изучаемые вопросы
Дополнительные модули БЛА
Взаимодействие БЛА и модулей
Программирование БЛА
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ
Цель занятия
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
Цель занятия
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В

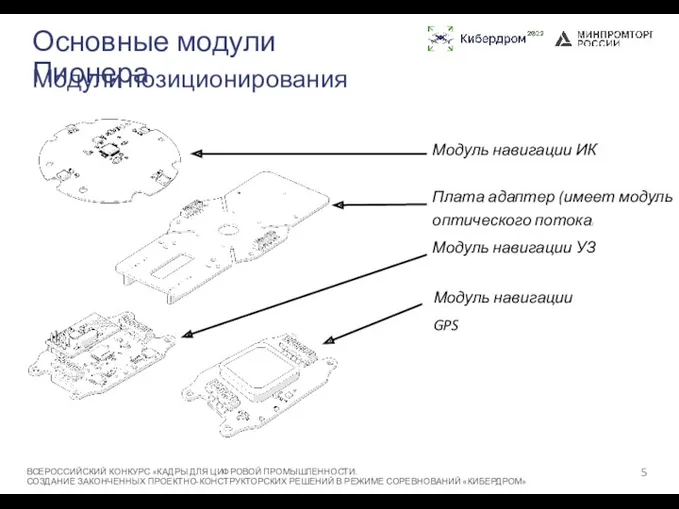
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ

Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
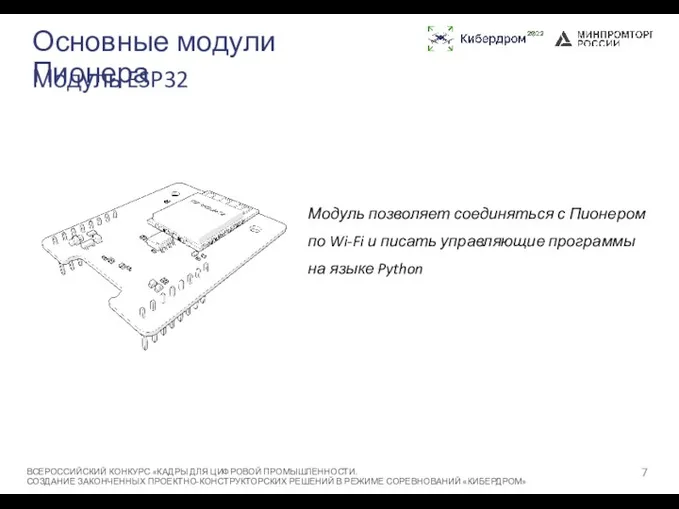
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Основные модули Пионера
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
Программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ

Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на LUA
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Блочное программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
Блочное программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
Блочное программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
Блочное программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
Блочное программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
Блочное программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
Блочное программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
Блочное программирование
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Программирование на Python
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Вопросы для самоподготовки
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Вопросы для самоподготовки
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Домашнее задание обязательно
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
Домашнее задание обязательно
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ
 Технологии работы с информацией и знаниями
Технологии работы с информацией и знаниями Обзор информационной системы КАСАНТ/КАСАТ
Обзор информационной системы КАСАНТ/КАСАТ Онтологические модели представления знаний
Онтологические модели представления знаний Console Input / Output Reading and Writing to the Console
Console Input / Output Reading and Writing to the Console Создание и использование ЦОР на уроках информатики с целью формирования у учащихся информационно-коммуникационной компетентности
Создание и использование ЦОР на уроках информатики с целью формирования у учащихся информационно-коммуникационной компетентности Информационное общество. Требования к уровням компьютерной грамотности. Стандарты оформления научных работ
Информационное общество. Требования к уровням компьютерной грамотности. Стандарты оформления научных работ Основи растрової графіки. Використання фото та кліпартів. Растрова анімація
Основи растрової графіки. Використання фото та кліпартів. Растрова анімація Устройство компьютера. Аналогия между компьютером и человеком
Устройство компьютера. Аналогия между компьютером и человеком Науковедение, наукометрия, библиометрия
Науковедение, наукометрия, библиометрия Основы работы в CorelDRAW X7. Компьютерная графика
Основы работы в CorelDRAW X7. Компьютерная графика Логическое программирование
Логическое программирование Автоматизированные системы обработки информации
Автоматизированные системы обработки информации Информационные ресурсы интернета
Информационные ресурсы интернета Виды базы данных
Виды базы данных Своя игра
Своя игра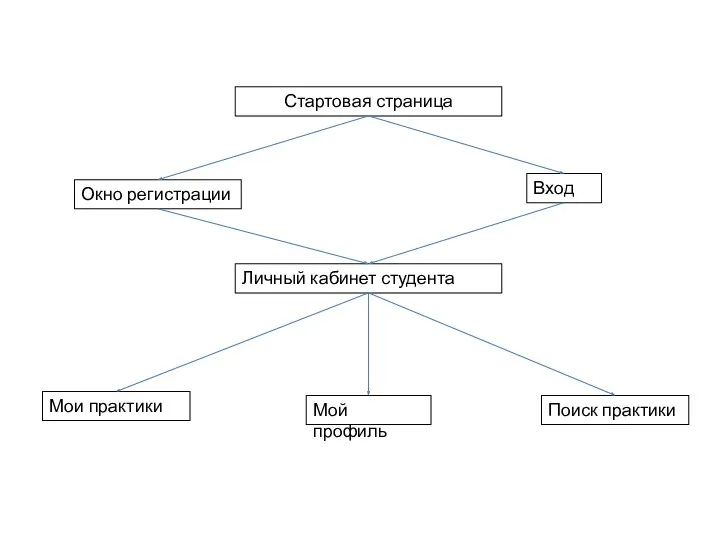 Стартовая страница
Стартовая страница Мультимедийная разработка урока изобразительного искусства (5 класс)
Мультимедийная разработка урока изобразительного искусства (5 класс) Основы сетевого администрирования
Основы сетевого администрирования Understanding CSS. Essentials: layouts, managing text flow, managing the graphical interface
Understanding CSS. Essentials: layouts, managing text flow, managing the graphical interface Паттерны проектирования
Паттерны проектирования Информационные технологии и системы. Автоматизированные информационные системы (АИС)
Информационные технологии и системы. Автоматизированные информационные системы (АИС) Хранение информации. 10 лекция
Хранение информации. 10 лекция Кодирование информации
Кодирование информации Программирование (Python)
Программирование (Python) Bitcoin. Как это работает — предпосылки
Bitcoin. Как это работает — предпосылки Analysis and Design of Data Systems. Enhanced ER (EER) Mode. (Lecture 11)
Analysis and Design of Data Systems. Enhanced ER (EER) Mode. (Lecture 11) Адресация компьютера в сети
Адресация компьютера в сети Управление файловой системой. Основные понятия. (Лекция 13)
Управление файловой системой. Основные понятия. (Лекция 13)