- Применение нейронных сетей в системах автоматического регулирования

Содержание
- 2. Типовые структуры систем регулирования с нейронными сетями 1. Нейрорегулятор – простейшая схема автоматического регулирования, в которой
- 3. Нейрорегулятор Простейшая нейронная структура, используемая в системах регулирования. Возможны различные варианты структур таких систем. Простейший случай
- 4. Нейрорегуляторы Преимущества реализации нелинейных регуляторов с помощью нейронных сетей: 1. Не требует наличия математического описания объекта;
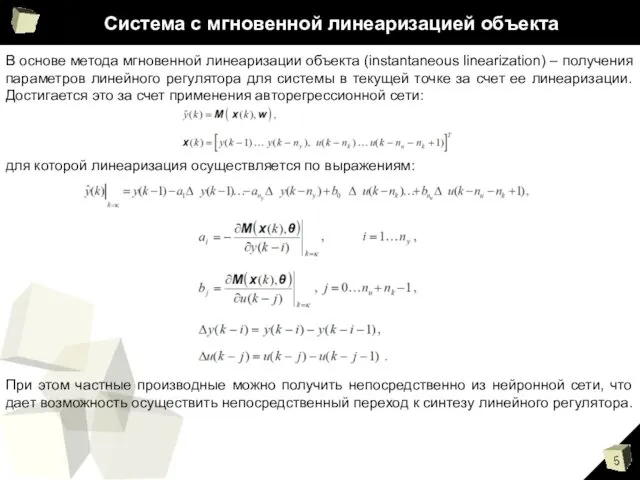
- 5. Система с мгновенной линеаризацией объекта В основе метода мгновенной линеаризации объекта (instantaneous linearization) – получения параметров
- 6. Система с мгновенной линеаризацией объекта
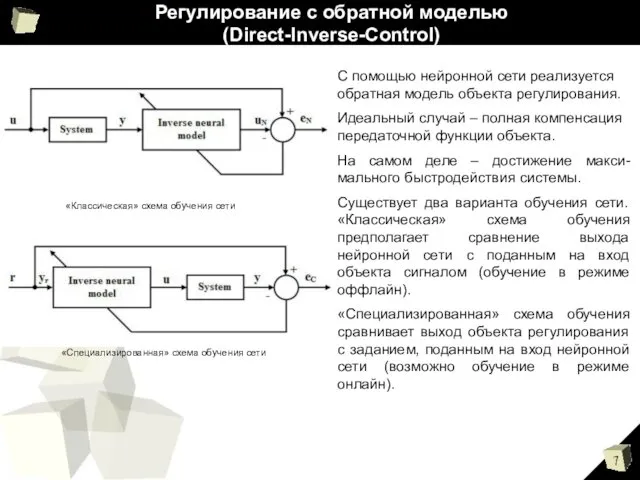
- 7. Регулирование с обратной моделью (Direct-Inverse-Control) С помощью нейронной сети реализуется обратная модель объекта регулирования. Идеальный случай
- 8. Регулирование с обратной моделью Обучение в режиме оффлайн не всегда можно применить к современным мехатронным системам,
- 9. Регулирование с обратной моделью
- 10. Косвенное нейронное регулирование Косвенное нейронное регулирование (feedforward inverse control, specialized inverse learning) – усовершенствованный метод регулирования
- 11. Регулирование с внутренней моделью (internal model control) Internal Model Control – система регулирования с обратной и
- 12. Двухканальное регулирование Двухканальная система регулирования (feedforward feedback error control) отличается от системы регулирования с внутренней моделью
- 13. Регулирование с обучением по сигналу обратной связи Feedback-Error-Learning Control – замкнутая система регулирования с использованием обратной
- 14. Регулирование с компенсацией опорного сигнала Reerence compensation technique – особый подход к созданию обратной модели объекта,
- 15. Регулирование с компенсацией опорного сигнала Reerence compensation technique – особый подход к созданию обратной модели объекта,
- 16. Системы регулирования с опорной моделью Model Reference Adaptive Control (MRAC) – система автоматического регулирования, которая позволяет
- 17. Варианты MRAC-систем Прямое управление с опорной моделью –подразумевает наличие достаточно точной информации об объекте регулирования и
- 18. Предиктивное управление Системы с предиктивным управлением применяются для оптимизации закона управления объектом в режиме онлайн в
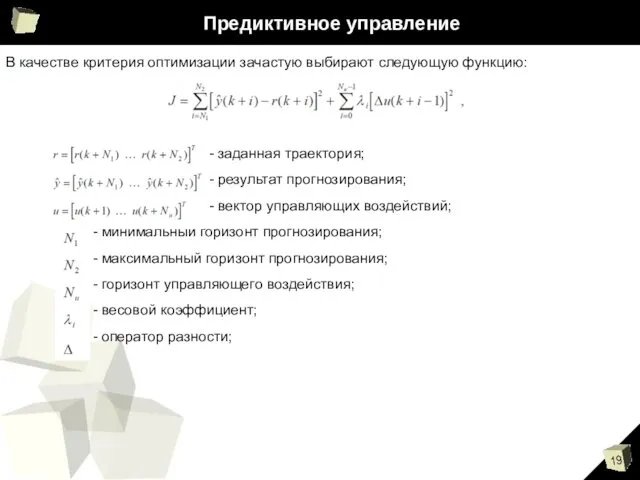
- 19. Предиктивное управление В качестве критерия оптимизации зачастую выбирают следующую функцию: - заданная траектория; - результат прогнозирования;
- 20. Пример применения системы с предиктивным управлением Система с предиктивным управлением используется для стабилизации магнита в заданной
- 21. Система с линеаризацией обратной связи Системы управления с линеаризацией обратной связи используют специальную форму NARMAX-регрессоров, поэтому
- 22. Система с линеаризацией обратной связи Структура нейронной сети Общий вид системы регулирования
- 24. Скачать презентацию
Типовые структуры систем регулирования с нейронными сетями
1. Нейрорегулятор – простейшая схема
Типовые структуры систем регулирования с нейронными сетями
1. Нейрорегулятор – простейшая схема

Нейрорегулятор
Простейшая нейронная структура, используемая в системах регулирования.
Возможны различные варианты структур
Нейрорегулятор
Простейшая нейронная структура, используемая в системах регулирования.
Возможны различные варианты структур
Нейрорегуляторы
Преимущества реализации нелинейных регуляторов с помощью нейронных сетей:
1. Не требует наличия
Нейрорегуляторы
Преимущества реализации нелинейных регуляторов с помощью нейронных сетей:
1. Не требует наличия
Система с мгновенной линеаризацией объекта
В основе метода мгновенной линеаризации объекта (instantaneous
Система с мгновенной линеаризацией объекта
В основе метода мгновенной линеаризации объекта (instantaneous

Система с мгновенной линеаризацией объекта
Система с мгновенной линеаризацией объекта
Регулирование с обратной моделью (Direct-Inverse-Control)
С помощью нейронной сети реализуется обратная модель
Регулирование с обратной моделью (Direct-Inverse-Control)
С помощью нейронной сети реализуется обратная модель
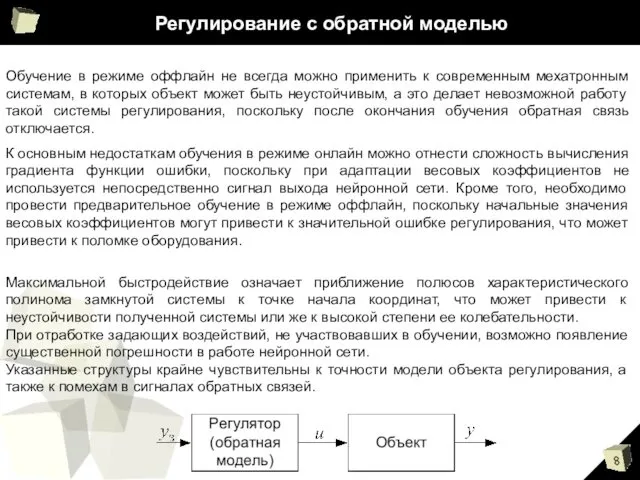
Регулирование с обратной моделью
Обучение в режиме оффлайн не всегда можно применить
Регулирование с обратной моделью
Обучение в режиме оффлайн не всегда можно применить
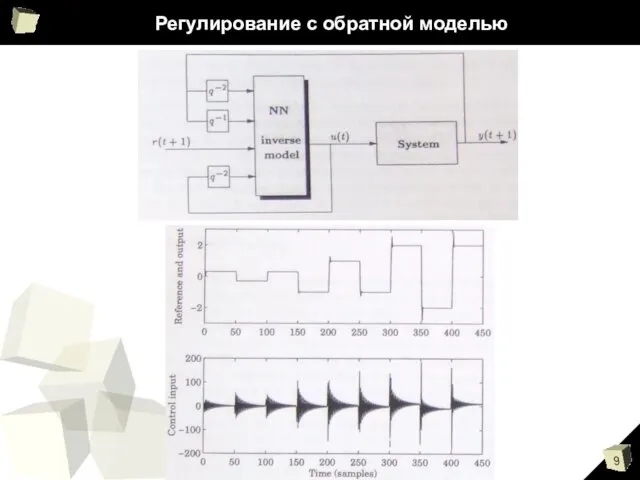
Регулирование с обратной моделью
Регулирование с обратной моделью
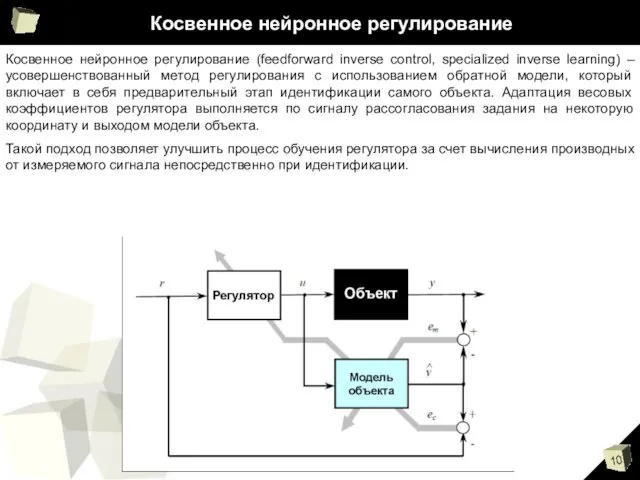
Косвенное нейронное регулирование
Косвенное нейронное регулирование (feedforward inverse control, specialized inverse learning)
Косвенное нейронное регулирование
Косвенное нейронное регулирование (feedforward inverse control, specialized inverse learning)

Регулирование с внутренней моделью (internal model control)
Internal Model Control – система
Регулирование с внутренней моделью (internal model control)
Internal Model Control – система

Двухканальное регулирование
Двухканальная система регулирования (feedforward feedback error control) отличается от системы
Двухканальное регулирование
Двухканальная система регулирования (feedforward feedback error control) отличается от системы
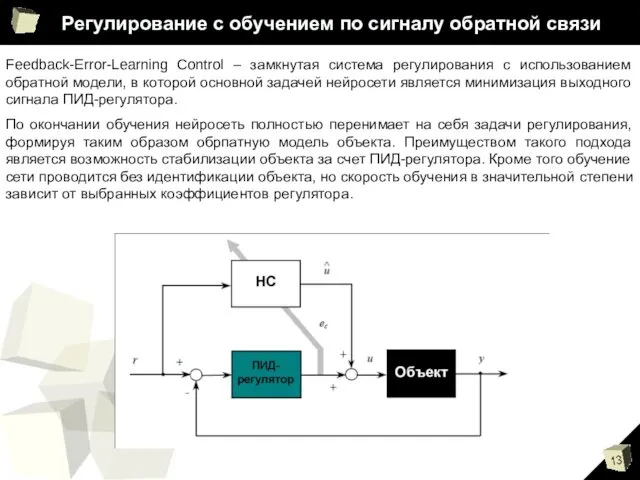
Регулирование с обучением по сигналу обратной связи
Feedback-Error-Learning Control – замкнутая система
Регулирование с обучением по сигналу обратной связи
Feedback-Error-Learning Control – замкнутая система

Регулирование с компенсацией опорного сигнала
Reerence compensation technique – особый подход к
Регулирование с компенсацией опорного сигнала
Reerence compensation technique – особый подход к

Регулирование с компенсацией опорного сигнала
Reerence compensation technique – особый подход к
Регулирование с компенсацией опорного сигнала
Reerence compensation technique – особый подход к
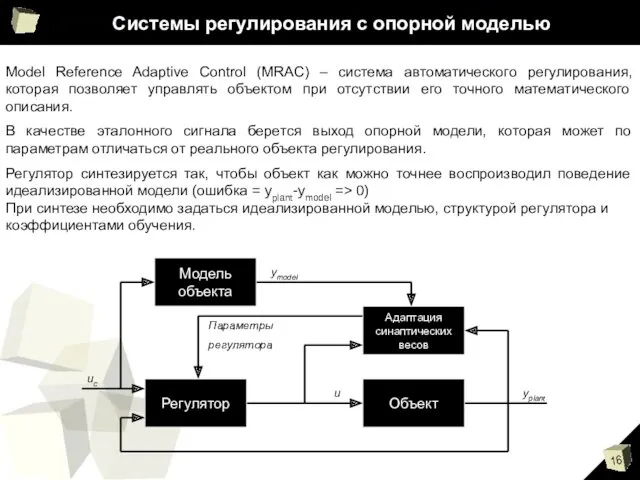
Системы регулирования с опорной моделью
Model Reference Adaptive Control (MRAC) – система
Системы регулирования с опорной моделью
Model Reference Adaptive Control (MRAC) – система
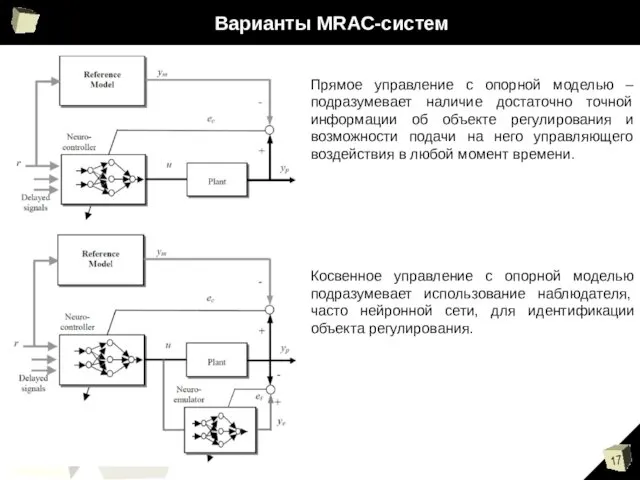
Варианты MRAC-систем
Прямое управление с опорной моделью –подразумевает наличие достаточно точной информации
Варианты MRAC-систем
Прямое управление с опорной моделью –подразумевает наличие достаточно точной информации
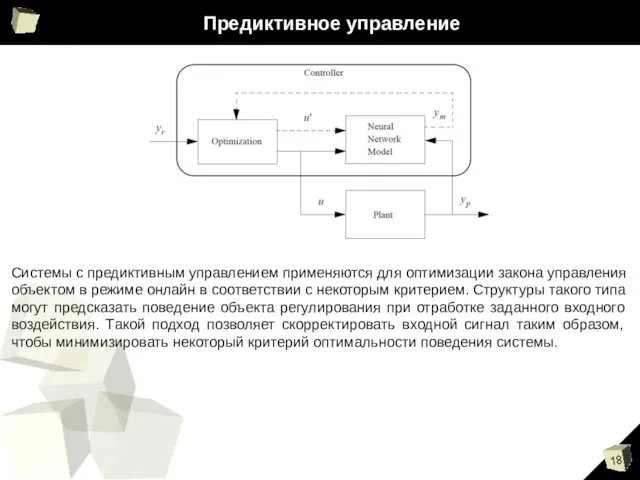
Предиктивное управление
Системы с предиктивным управлением применяются для оптимизации закона управления объектом
Предиктивное управление
Системы с предиктивным управлением применяются для оптимизации закона управления объектом
Предиктивное управление
В качестве критерия оптимизации зачастую выбирают следующую функцию:
- заданная траектория;
-
Предиктивное управление
В качестве критерия оптимизации зачастую выбирают следующую функцию:
- заданная траектория;
-
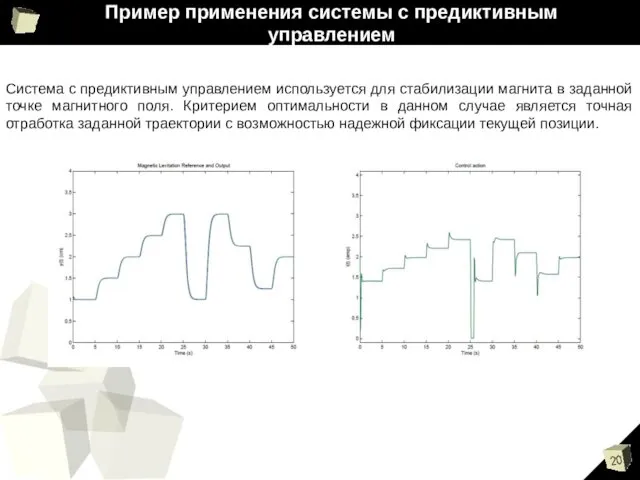
Пример применения системы с предиктивным управлением
Система с предиктивным управлением используется для
Пример применения системы с предиктивным управлением
Система с предиктивным управлением используется для
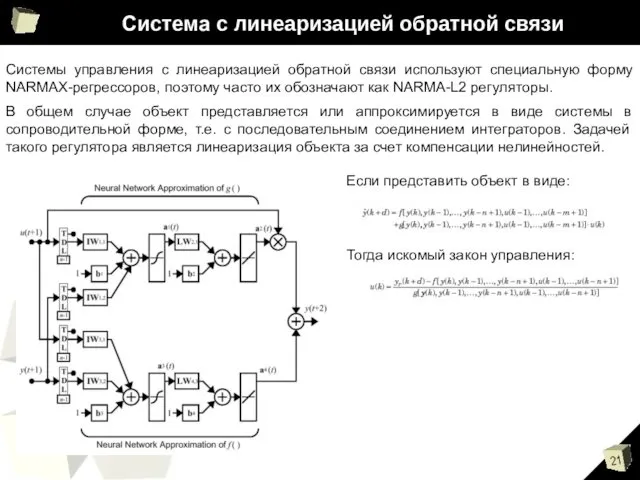
Система с линеаризацией обратной связи
Системы управления с линеаризацией обратной связи используют
Система с линеаризацией обратной связи
Системы управления с линеаризацией обратной связи используют
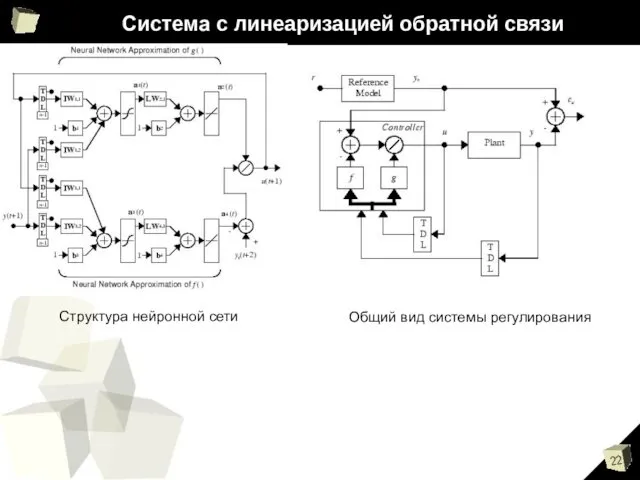
Система с линеаризацией обратной связи
Структура нейронной сети
Общий вид системы регулирования
Система с линеаризацией обратной связи
Структура нейронной сети
Общий вид системы регулирования
 Информация и знания. Восприятие человеком информации.
Информация и знания. Восприятие человеком информации. What is cryptocurrency
What is cryptocurrency Выполнение алгоритмов исполнителя
Выполнение алгоритмов исполнителя 3D-сканер, устройство, использование для создания прототипов
3D-сканер, устройство, использование для создания прототипов Вычисление на компьютере с помощью калькулятора. 5 класс
Вычисление на компьютере с помощью калькулятора. 5 класс Массивы, структуры, указатели: начало. Лекция 3
Массивы, структуры, указатели: начало. Лекция 3 HTML-VR: программируемые 3D кнопки-гиперссылки и 3Dpx объекты
HTML-VR: программируемые 3D кнопки-гиперссылки и 3Dpx объекты Минимизация логических функций
Минимизация логических функций Web-страницы. Язык HTML
Web-страницы. Язык HTML Мобильное приложение службы спасения Московской области 112
Мобильное приложение службы спасения Московской области 112 Язык описания бизнес-процессов IDEF0
Язык описания бизнес-процессов IDEF0 Секреты Инстаграм
Секреты Инстаграм Проектирование и реализация физической топологии AD DS
Проектирование и реализация физической топологии AD DS Разработка игрового занятия по информатике для детей дошкольного и младшего школьного возраста Предметы. Группы предметов.
Разработка игрового занятия по информатике для детей дошкольного и младшего школьного возраста Предметы. Группы предметов. Операторы ветвления
Операторы ветвления Декоративно-прикладне мистецтво. Підручник
Декоративно-прикладне мистецтво. Підручник Программирование. Язык Pascal.
Программирование. Язык Pascal. Электронная таблица Excel
Электронная таблица Excel Операторы цикла
Операторы цикла Базы данных, основные понятия
Базы данных, основные понятия Восстановление данных с различных носителей
Восстановление данных с различных носителей История создания Tagul
История создания Tagul Абсолютные, относительные и смешанные ссылки в электронных таблицах
Абсолютные, относительные и смешанные ссылки в электронных таблицах OLAP-технологии. Хранилища данных
OLAP-технологии. Хранилища данных Подготовка к выгрузке данных в ФСПЭО из АИС Сетевой город. Образование версия 5.0 и АИС Е-Услуги
Подготовка к выгрузке данных в ФСПЭО из АИС Сетевой город. Образование версия 5.0 и АИС Е-Услуги Информатика. Материалы к лекциям. Построение графиков функций в Excel. Математические функции рабочего листа
Информатика. Материалы к лекциям. Построение графиков функций в Excel. Математические функции рабочего листа Урок по теме Сортировка, удаление и добавление записей 8 класс
Урок по теме Сортировка, удаление и добавление записей 8 класс Створення таблиці
Створення таблиці