- Программирование в среде RobotC

Содержание
- 2. План занятий Введение в RobotC Вывод данных Графика Датчики Моторы Применение регуляторов Воспроизведение по памяти
- 3. Загрузка операционной системы 1. Тип контроллера Меню Robot -> Platform Type->Lego Mindstorms->EV3 2. Ядро Меню Robot
- 4. Простейшая программа task main() { displayTextLine(0, "Hello, world!"); wait1Msec(10000); } Меню File -> Save as... —
- 5. Загрузка и отладка программы F7 — компиляция и проверка F5 — загрузка программы Start — запуск
- 6. Форматированный вывод task main() { float a=5, b=4, c=1; int a=5, b=4; displayTextLine(0, "a=%d b=%d",a,b); displayTextLine(1,
- 7. Команды ожидания wait1Msec(1); sleep(1); wait1Msec(N); sleep(N); wait10Msec(N); while(УСЛОВИЕ); while(УСЛОВИЕ) sleep(1); Жди 1 миллисекунду (синонимы) Жди N
- 8. Управление моторами task main() { motor[motorB]=100; // полный вперед motor[motorC]=100; wait1Msec(2000); // по времени motor[motorB]=-50; //
- 9. Поворот с помощью гироскопического датчика task main() { int angle=SensorValue[Gyro]; // Запомнили текущее while (true) //
- 10. Управление скоростью task main() { for (int i=1; i { motor[motorB]=i; motor[motorC]=i; wait1Msec(10); } wait1Msec(1000); //
- 11. Параллельное управление скоростью int mB=0, mC=0, step=5; //Скорости моторов и шаг task motors() { while(true) {
- 12. Контроль управления скоростью Необходимо ограничение модуля скорости не более 100 На малых отклонениях необходимо повышение точности
- 13. Доступ к энкодерам без обнуления К энкодерам и моторам нельзя обращаться из разных задач Задаем глобальные
- 14. Доступ к энкодерам с обнулением В основной задаче для обнуления задаем enB_null=1 int mB=0, mC=0, step=25,
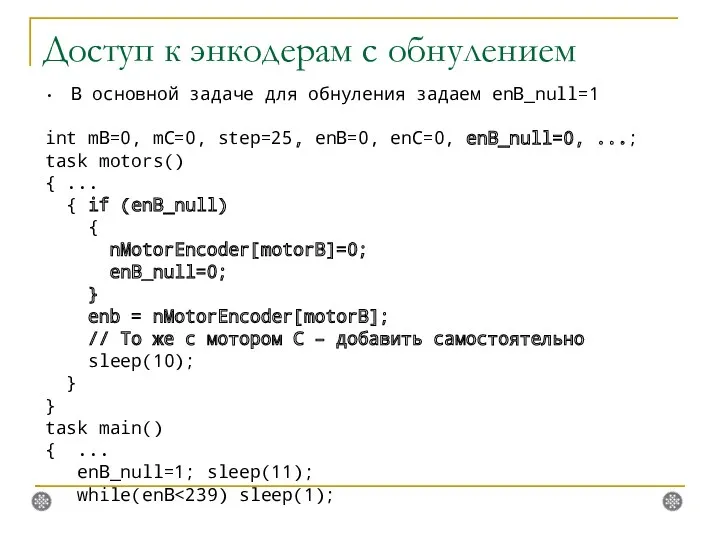
- 15. Подключение датчика Меню Robot -> Motors and Sensors Setup -> Sensors #pragma config(Sensor, S1, Rasst, sensorSONAR)
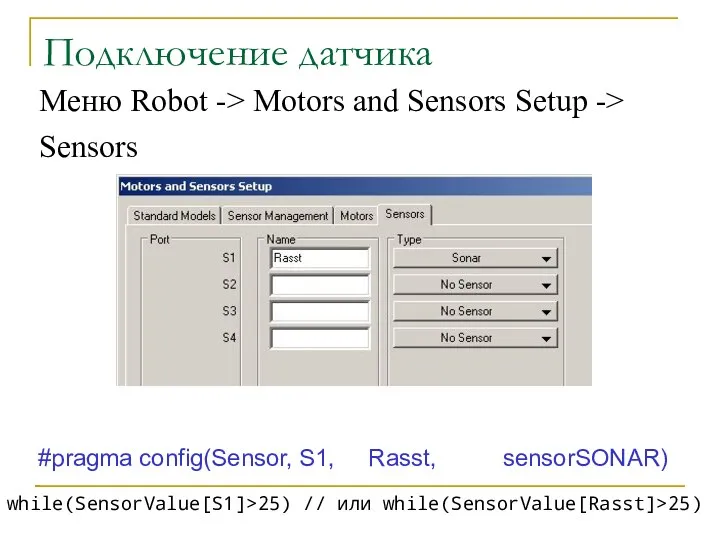
- 16. Путешествие по комнате #pragma config(Sensor, S1, Rasst, sensorEV3_Ultrasonic) task main() { while(true) { motor[motorB]=100; // полный
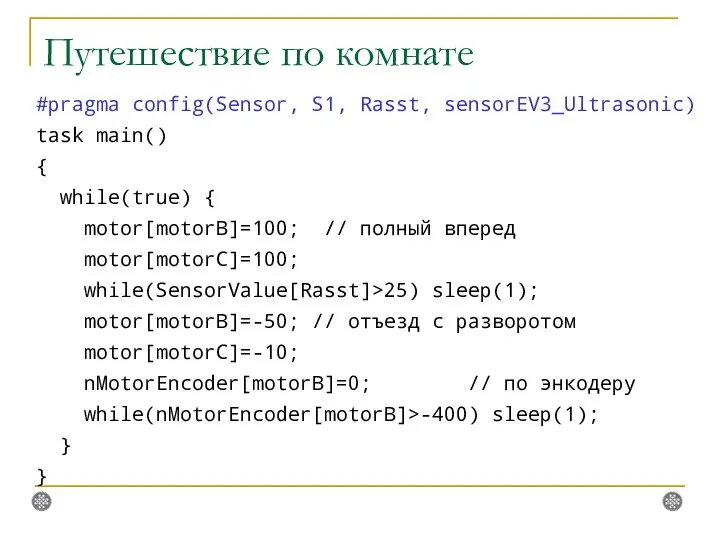
- 17. Вывод показаний датчиков на экран ... while(SensorValue[Rasst]>25) { displayBigTextLine(0, "%d", SensorValue[Rasst]); sleep(10); } ... while(nMotorEncoder[motorB]>-400) {
- 18. Пропорциональный регулятор: синхронизация моторов Пусть e2 и e3 – показания датчиков оборотов моторов B и C.
- 19. Синхронизация при путешествии по комнате Для синхронизации движения вперед необходимо перед циклом ожидания объекта обнулить энкодеры:
- 20. Параллельное управление моторами int v=50, k=2, u; task preg() // Объявление задачи { nMotorEncoder[motorB]=0; nMotorEncoder[motorC]=0; while(true){
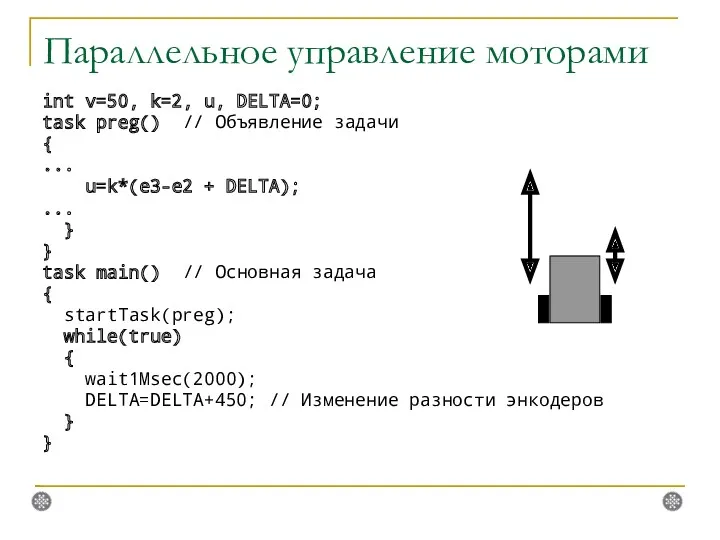
- 21. Параллельное управление моторами int v=50, k=2, u, DELTA=0; task preg() // Объявление задачи { ... u=k*(e3-e2
- 22. Параллельное управление моторами int v=50, k=2, u, DELTA=0; task preg() // Объявление задачи { ... u=k*(e3-e2
- 23. Управление шагающим роботом int v=50, k=2, u, DELTA=0, i=1; task preg() // Объявление задачи { ...
- 24. Управление шагающим роботом с датчиком расстояния Робот двигается до препятствия На поворот выделяется время Для синхронизации
- 25. Шагающий робот на линии Калибровка на старте Определение динамической ошибки как коэффициента периода поворота task main()
- 26. Графика на экране NXT: 100х64 пикселя 8 текстовых строк (0..7) EV3: 178х128 пикселей 16 текстовых строк
- 27. Отображение громкости звука на экране NXT #pragma config(Sensor, S1, Zvuk, sensorSoundDBA) task main() { int d=0,
- 28. Подключение датчика Меню Robot -> Motors and Sensors Setup -> Sensors #pragma config(Sensor, S1, , sensorLightActive)
- 29. Подключение датчика EV3 Меню Robot -> Motors and Sensors Setup -> Sensors #pragma config (Sensor, S1,
- 30. График показаний датчика Составьте алгоритм вывода на экран графика показаний датчика света. Частота 10 замеров в
- 31. Отображение показаний датчика в виде изменяющегося эллипса #pragma config(Sensor, S1, Light, sensorEV3_Color) task main() { int
- 32. Релейный регулятор: движение вдоль границы черного и белого с помощью датчика освещенности int grey=15; // Приближенное
- 33. Пропорциональный регулятор В задачах автоматического регулирования управляющее воздействие u(t) обычно является функцией динамической ошибки – отклонения
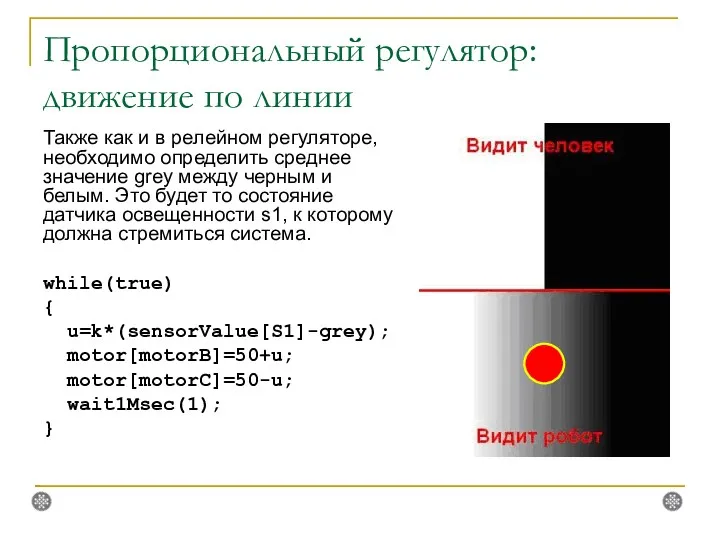
- 34. Пропорциональный регулятор: движение по линии Также как и в релейном регуляторе, необходимо определить среднее значение grey
- 35. Пропорциональный регулятор: вычисление коэффициента усиления Базовая скорость робота v Максимальная скорость vmax Минимальная vmin Минимальное значение
- 36. Параллельные задачи task line() // Объявление задачи { while(true) { // Здесь должен быть регулятор для
- 37. Параллельные задачи - 2 task line() // Объявление задачи { while(true) { // Здесь должен быть
- 38. Параллельные задачи - 3 int svalue=0; // Глобальная переменная task line() { while(true) { svalue=SensorValue[S1]; //
- 39. Параллельные задачи – 4 – массивы int mas[178]; // Массив в RobotC объявляется глобально task line()
- 40. Параллельные задачи – 5 – массивы int mas[178]; // Массив task line() ... task main() //
- 41. Параллельное управление моторами int v=50, delta=0; // Глобальные переменные task preg() // Параллельная задача { float
- 42. task line() { while(true) { // П-регулятор //движения по линии } } task preg() { while(true)
- 43. int alpha=0, beta=0; float kp=0.5; task preg() { while(true) { e=alpha-nMotorEncoder[motorB]; motor[motorB]=e*kp; e=beta-nMotorEncoder[motorC]; motor[motorC]=e*kp; sleep(1); }
- 44. task line() { while(true) { // П-регулятор //движения по линии } } task preg() { while(true)
- 45. for(int j=0;j { // По энкодерам int eB = alpha - nMotorEncoder[motorB]; int eC = beta
- 46. while(i { int eB=nMotorEncoder[motorB]; int eC=nMotorEncoder[motorC]; if ((e1[i] (e2[i] i++; // Уровень отставания энкодеров erm=((e1[i]-eB)-(e2[i]-eC))*km; if
- 48. Скачать презентацию
План занятий
Введение в RobotC
Вывод данных
Графика
Датчики
Моторы
Применение регуляторов
Воспроизведение по памяти
План занятий
Введение в RobotC
Вывод данных
Графика
Датчики
Моторы
Применение регуляторов
Воспроизведение по памяти

Загрузка операционной системы
1. Тип контроллера
Меню Robot -> Platform Type->Lego Mindstorms->EV3
2.
Загрузка операционной системы
1. Тип контроллера
Меню Robot -> Platform Type->Lego Mindstorms->EV3
2.
Простейшая программа
task main()
{
displayTextLine(0, "Hello, world!");
wait1Msec(10000);
}
Меню File -> Save as...
Простейшая программа
task main()
{
displayTextLine(0, "Hello, world!");
wait1Msec(10000);
}
Меню File -> Save as...
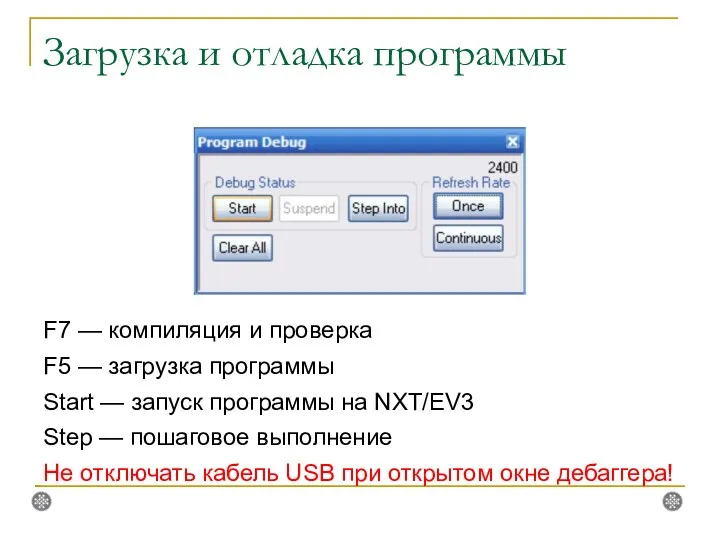
Загрузка и отладка программы
F7 — компиляция и проверка
F5 — загрузка программы
Start
Загрузка и отладка программы
F7 — компиляция и проверка
F5 — загрузка программы
Start
Форматированный вывод
task main()
{
float a=5, b=4, c=1;
int a=5, b=4;
displayTextLine(0,
Форматированный вывод
task main()
{
float a=5, b=4, c=1;
int a=5, b=4;
displayTextLine(0,
Команды ожидания
wait1Msec(1);
sleep(1);
wait1Msec(N);
sleep(N);
wait10Msec(N);
while(УСЛОВИЕ);
while(УСЛОВИЕ) sleep(1);
Жди 1 миллисекунду (синонимы)
Жди N мс
Жди N*10 мс
Жди, пока
Команды ожидания
wait1Msec(1);
sleep(1);
wait1Msec(N);
sleep(N);
wait10Msec(N);
while(УСЛОВИЕ);
while(УСЛОВИЕ) sleep(1);
Жди 1 миллисекунду (синонимы)
Жди N мс
Жди N*10 мс
Жди, пока
![Управление моторами task main() { motor[motorB]=100; // полный вперед motor[motorC]=100;](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/330739/slide-7.jpg)
Управление моторами
task main()
{
motor[motorB]=100; // полный вперед
motor[motorC]=100;
wait1Msec(2000); // по
Управление моторами
task main()
{
motor[motorB]=100; // полный вперед
motor[motorC]=100;
wait1Msec(2000); // по
![Поворот с помощью гироскопического датчика task main() { int angle=SensorValue[Gyro];](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/330739/slide-8.jpg)
Поворот с помощью гироскопического датчика
task main()
{
int angle=SensorValue[Gyro]; // Запомнили текущее
while
Поворот с помощью гироскопического датчика
task main()
{
int angle=SensorValue[Gyro]; // Запомнили текущее
while
Управление скоростью
task main()
{
for (int i=1; i<=100; i++) // разгон 1
Управление скоростью
task main()
{
for (int i=1; i<=100; i++) // разгон 1
Параллельное управление скоростью
int mB=0, mC=0, step=5; //Скорости моторов и шаг
task motors()
{
Параллельное управление скоростью
int mB=0, mC=0, step=5; //Скорости моторов и шаг
task motors()
{
Контроль управления скоростью
Необходимо ограничение модуля скорости не более 100
На малых отклонениях
Контроль управления скоростью
Необходимо ограничение модуля скорости не более 100
На малых отклонениях
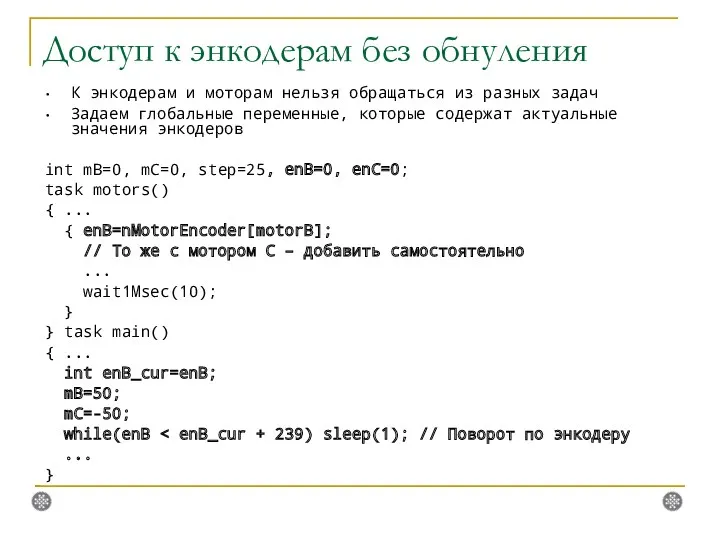
Доступ к энкодерам без обнуления
К энкодерам и моторам нельзя обращаться из
Доступ к энкодерам без обнуления
К энкодерам и моторам нельзя обращаться из
Доступ к энкодерам с обнулением
В основной задаче для обнуления задаем enB_null=1
int
Доступ к энкодерам с обнулением
В основной задаче для обнуления задаем enB_null=1
int
Подключение датчика
Меню Robot -> Motors and Sensors Setup ->
Sensors
#pragma config(Sensor, S1,
Подключение датчика
Меню Robot -> Motors and Sensors Setup ->
Sensors
#pragma config(Sensor, S1,
Путешествие по комнате
#pragma config(Sensor, S1, Rasst, sensorEV3_Ultrasonic)
task main()
{
while(true) {
motor[motorB]=100;
Путешествие по комнате
#pragma config(Sensor, S1, Rasst, sensorEV3_Ultrasonic)
task main()
{
while(true) {
motor[motorB]=100;
![Вывод показаний датчиков на экран ... while(SensorValue[Rasst]>25) { displayBigTextLine(0, "%d",](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/330739/slide-16.jpg)
Вывод показаний датчиков на экран
...
while(SensorValue[Rasst]>25)
{
displayBigTextLine(0, "%d", SensorValue[Rasst]);
sleep(10);
}
...
while(nMotorEncoder[motorB]>-400)
{
Вывод показаний датчиков на экран
...
while(SensorValue[Rasst]>25)
{
displayBigTextLine(0, "%d", SensorValue[Rasst]);
sleep(10);
}
...
while(nMotorEncoder[motorB]>-400)
{
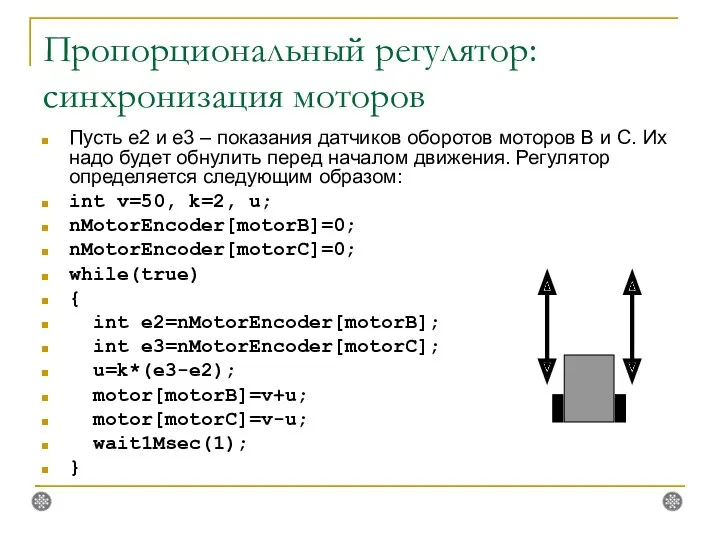
Пропорциональный регулятор: синхронизация моторов
Пусть e2 и e3 – показания датчиков оборотов
Пропорциональный регулятор: синхронизация моторов
Пусть e2 и e3 – показания датчиков оборотов
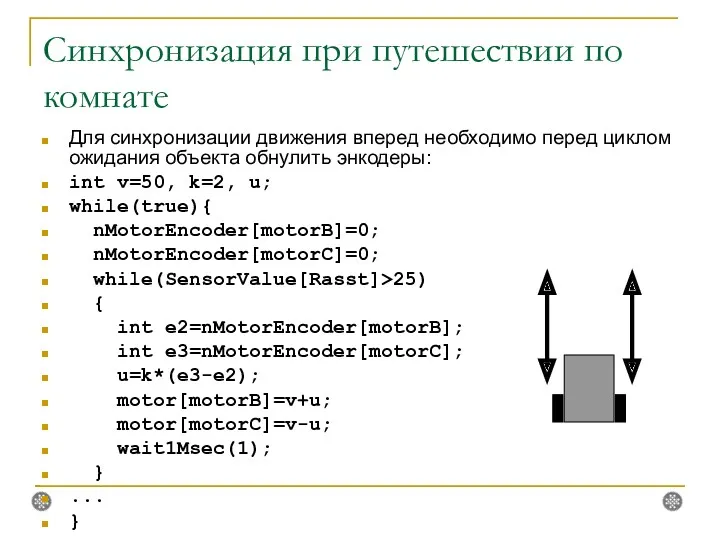
Синхронизация при путешествии по комнате
Для синхронизации движения вперед необходимо перед циклом
Синхронизация при путешествии по комнате
Для синхронизации движения вперед необходимо перед циклом
Параллельное управление моторами
int v=50, k=2, u;
task preg() // Объявление задачи
{
nMotorEncoder[motorB]=0;
Параллельное управление моторами
int v=50, k=2, u;
task preg() // Объявление задачи
{
nMotorEncoder[motorB]=0;
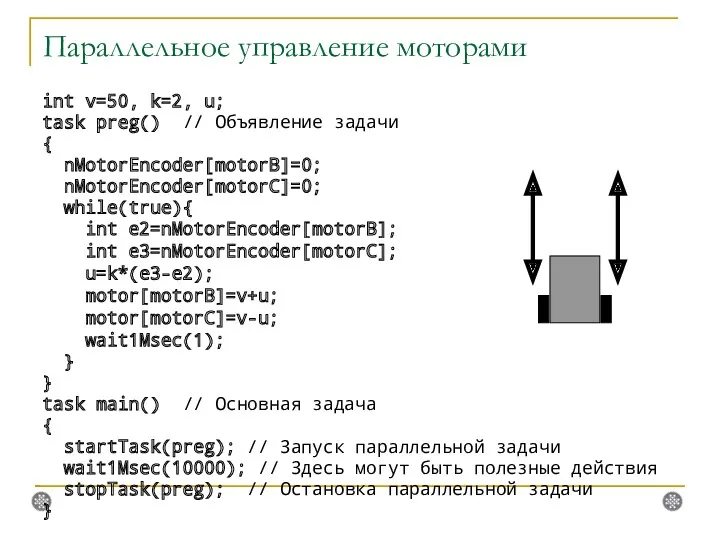
Параллельное управление моторами
int v=50, k=2, u, DELTA=0;
task preg() // Объявление задачи
{
...
Параллельное управление моторами
int v=50, k=2, u, DELTA=0;
task preg() // Объявление задачи
{
...
Параллельное управление моторами
int v=50, k=2, u, DELTA=0;
task preg() // Объявление задачи
{
...
Параллельное управление моторами
int v=50, k=2, u, DELTA=0;
task preg() // Объявление задачи
{
...

Управление шагающим роботом
int v=50, k=2, u, DELTA=0, i=1;
task preg() // Объявление
Управление шагающим роботом
int v=50, k=2, u, DELTA=0, i=1;
task preg() // Объявление

Управление шагающим роботом с датчиком расстояния
Робот двигается до препятствия
На поворот выделяется
Управление шагающим роботом с датчиком расстояния
Робот двигается до препятствия
На поворот выделяется

Шагающий робот на линии
Калибровка на старте
Определение динамической ошибки как коэффициента периода
Шагающий робот на линии
Калибровка на старте
Определение динамической ошибки как коэффициента периода
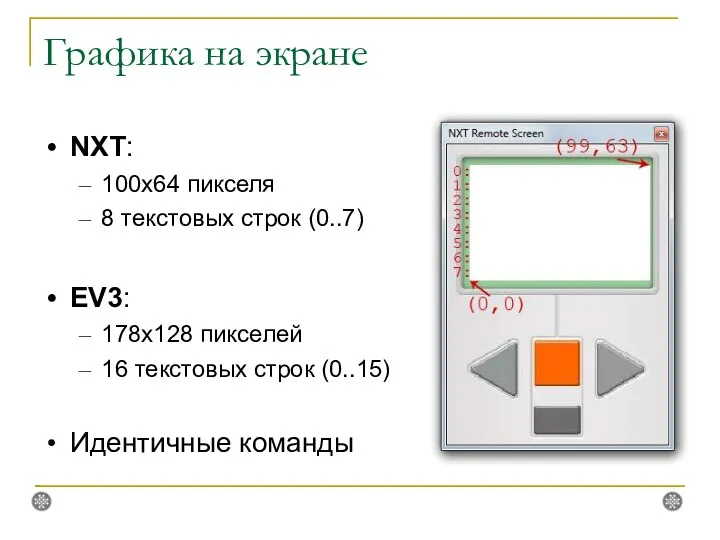
Графика на экране
NXT:
100х64 пикселя
8 текстовых строк (0..7)
EV3:
178х128 пикселей
16 текстовых
Графика на экране
NXT:
100х64 пикселя
8 текстовых строк (0..7)
EV3:
178х128 пикселей
16 текстовых
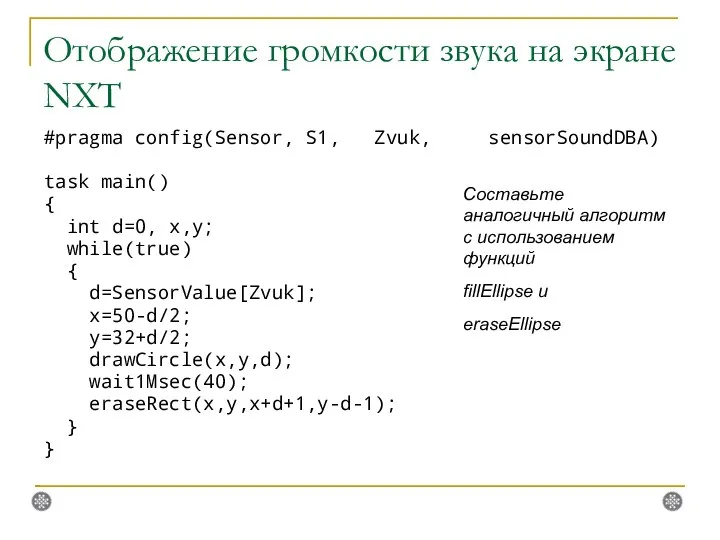
Отображение громкости звука на экране NXT
#pragma config(Sensor, S1, Zvuk, sensorSoundDBA)
task main()
{
Отображение громкости звука на экране NXT
#pragma config(Sensor, S1, Zvuk, sensorSoundDBA)
task main()
{
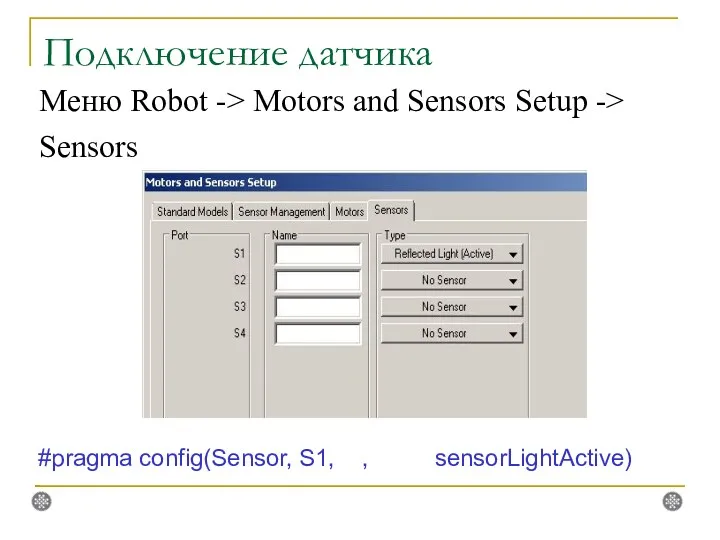
Подключение датчика
Меню Robot -> Motors and Sensors Setup ->
Sensors
#pragma config(Sensor, S1,
Подключение датчика
Меню Robot -> Motors and Sensors Setup ->
Sensors
#pragma config(Sensor, S1,
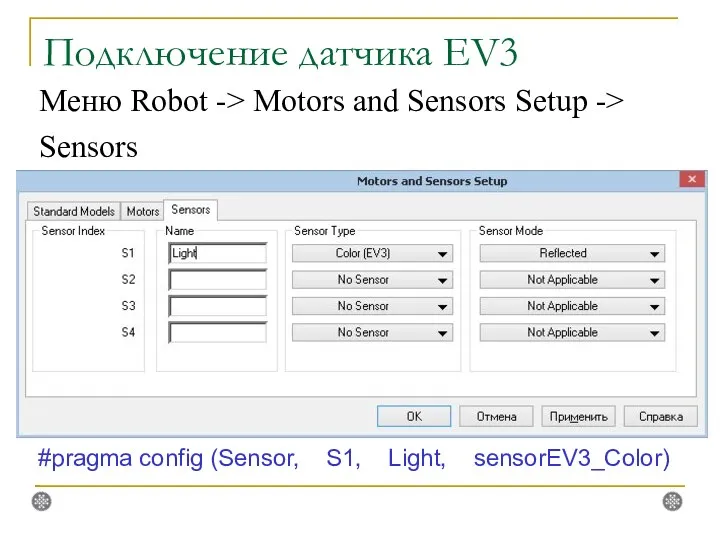
Подключение датчика EV3
Меню Robot -> Motors and Sensors Setup ->
Sensors
#pragma config
Подключение датчика EV3
Меню Robot -> Motors and Sensors Setup ->
Sensors
#pragma config
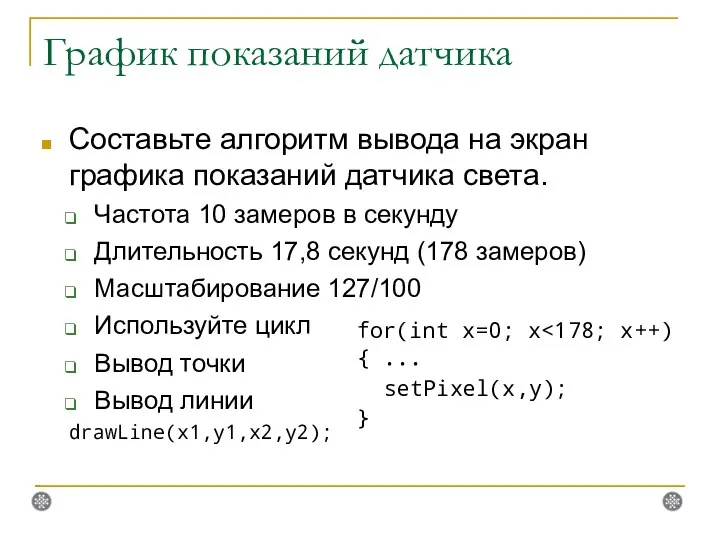
График показаний датчика
Составьте алгоритм вывода на экран графика показаний датчика света.
Частота
График показаний датчика
Составьте алгоритм вывода на экран графика показаний датчика света.
Частота
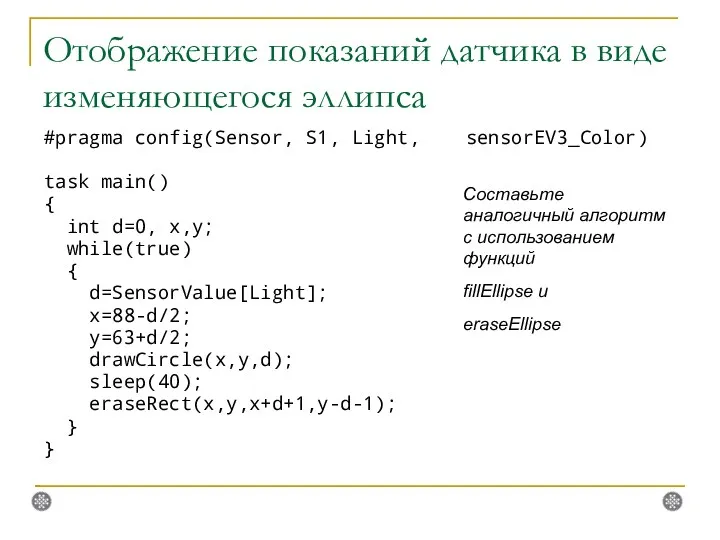
Отображение показаний датчика в виде изменяющегося эллипса
#pragma config(Sensor, S1, Light, sensorEV3_Color)
task
Отображение показаний датчика в виде изменяющегося эллипса
#pragma config(Sensor, S1, Light, sensorEV3_Color)
task
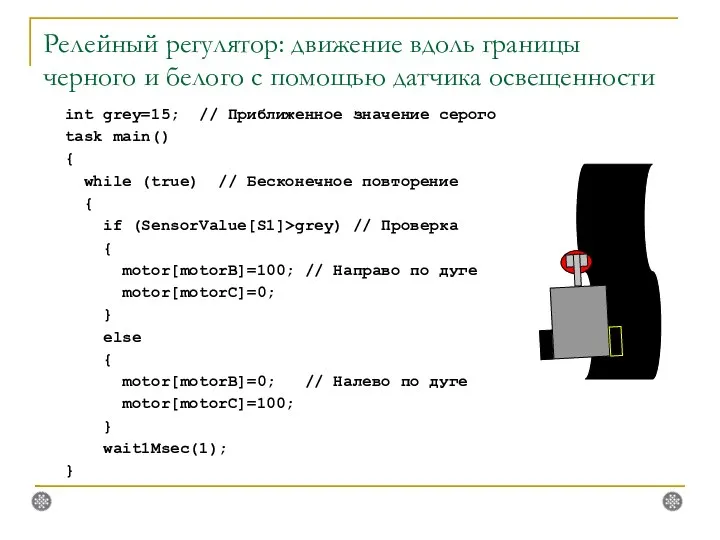
Релейный регулятор: движение вдоль границы черного и белого с помощью датчика
Релейный регулятор: движение вдоль границы черного и белого с помощью датчика
Пропорциональный регулятор
В задачах автоматического регулирования управляющее воздействие u(t) обычно является функцией
Пропорциональный регулятор
В задачах автоматического регулирования управляющее воздействие u(t) обычно является функцией
Пропорциональный регулятор: движение по линии
Также как и в релейном регуляторе, необходимо
Пропорциональный регулятор: движение по линии
Также как и в релейном регуляторе, необходимо
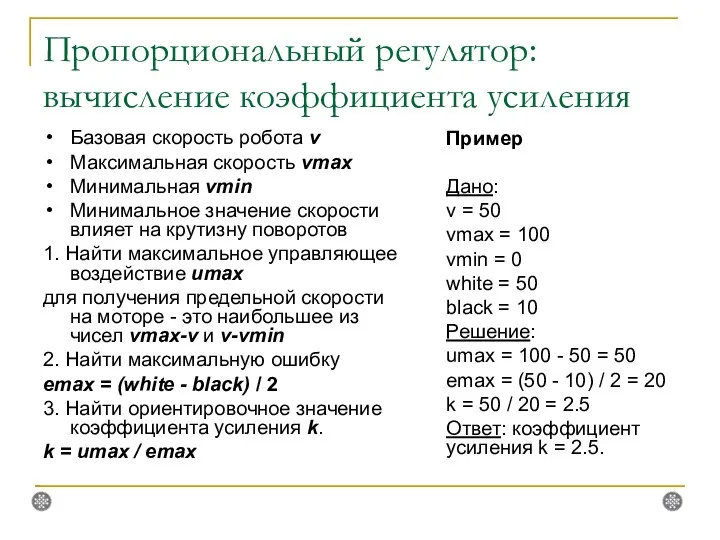
Пропорциональный регулятор: вычисление коэффициента усиления
Базовая скорость робота v
Максимальная скорость vmax
Пропорциональный регулятор: вычисление коэффициента усиления
Базовая скорость робота v
Максимальная скорость vmax
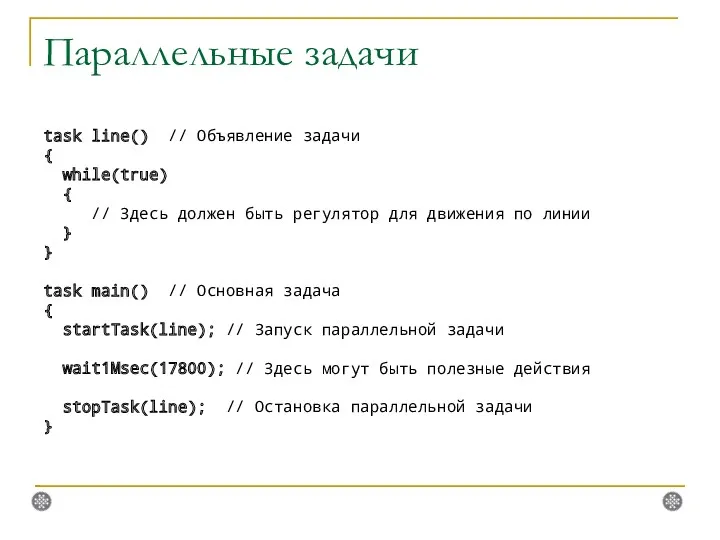
Параллельные задачи
task line() // Объявление задачи
{
while(true)
{
// Здесь
Параллельные задачи
task line() // Объявление задачи
{
while(true)
{
// Здесь
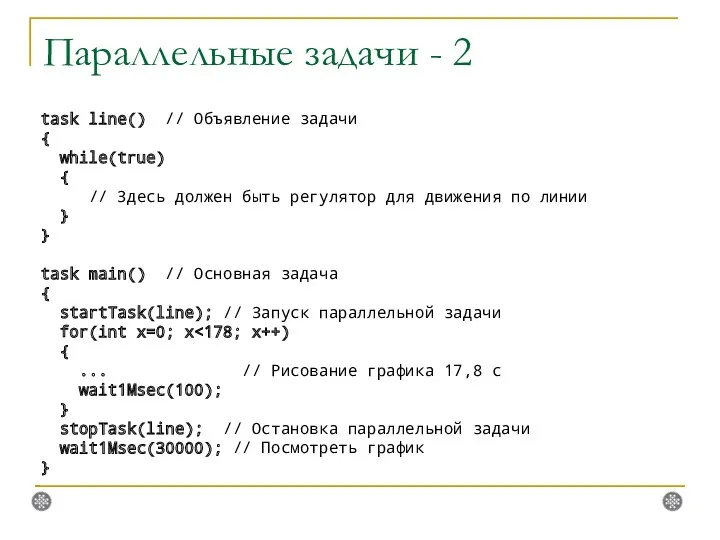
Параллельные задачи - 2
task line() // Объявление задачи
{
while(true)
{
Параллельные задачи - 2
task line() // Объявление задачи
{
while(true)
{
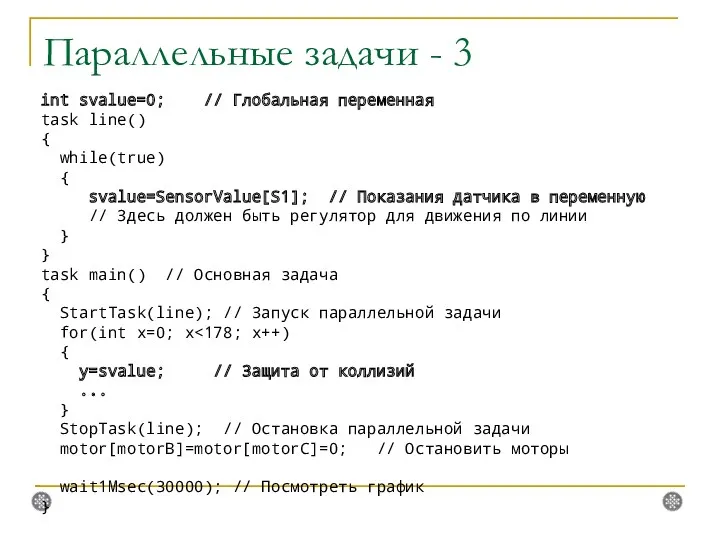
Параллельные задачи - 3
int svalue=0; // Глобальная переменная
task line()
{
while(true)
Параллельные задачи - 3
int svalue=0; // Глобальная переменная
task line()
{
while(true)
![Параллельные задачи – 4 – массивы int mas[178]; // Массив](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/330739/slide-38.jpg)
Параллельные задачи – 4 – массивы
int mas[178]; // Массив в RobotC
Параллельные задачи – 4 – массивы
int mas[178]; // Массив в RobotC
![Параллельные задачи – 5 – массивы int mas[178]; // Массив](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/330739/slide-39.jpg)
Параллельные задачи – 5 – массивы
int mas[178]; // Массив
task line()
...
task
Параллельные задачи – 5 – массивы
int mas[178]; // Массив
task line()
...
task
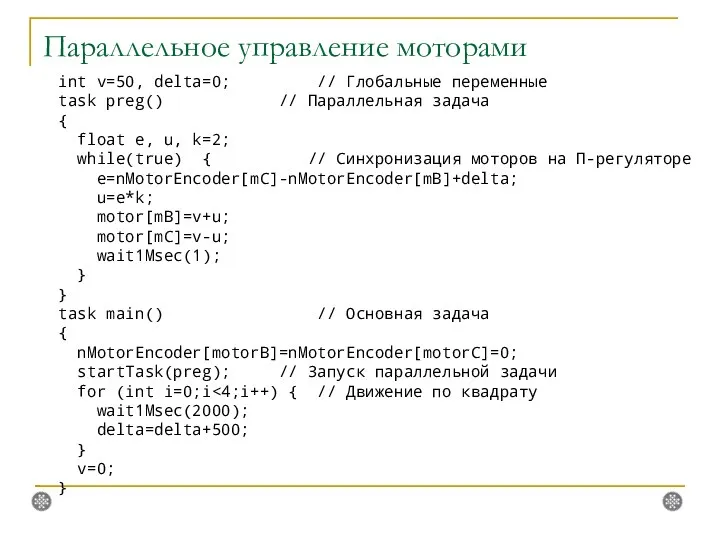
Параллельное управление моторами
int v=50, delta=0; // Глобальные переменные
task preg() // Параллельная
Параллельное управление моторами
int v=50, delta=0; // Глобальные переменные
task preg() // Параллельная
task line()
{
while(true) {
// П-регулятор
//движения по линии
}
}
task
task line()
{
while(true) {
// П-регулятор
//движения по линии
}
}
task
int alpha=0, beta=0;
float kp=0.5;
task preg()
{
while(true) {
e=alpha-nMotorEncoder[motorB];
motor[motorB]=e*kp;
int alpha=0, beta=0;
float kp=0.5;
task preg()
{
while(true) {
e=alpha-nMotorEncoder[motorB];
motor[motorB]=e*kp;
task line()
{
while(true) {
// П-регулятор
//движения по линии
}
}
task
task line()
{
while(true) {
// П-регулятор
//движения по линии
}
}
task
for(int j=0;j<100;j++)
{ // По энкодерам
int eB = alpha
for(int j=0;j<100;j++)
{ // По энкодерам
int eB = alpha
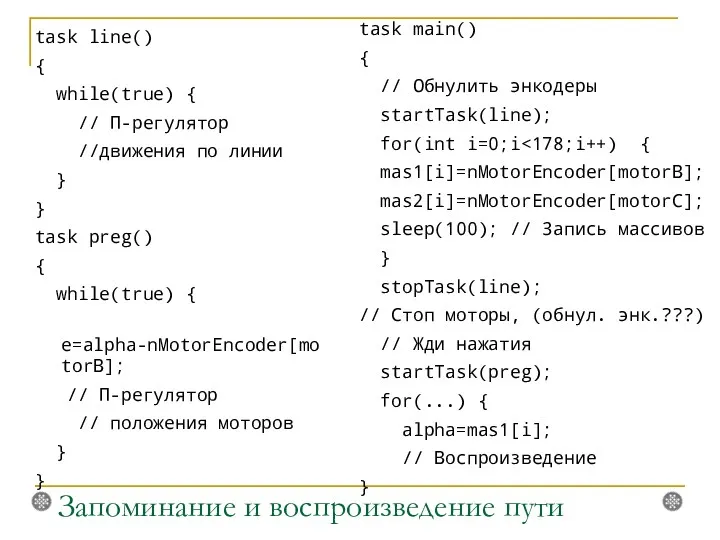
![while(i { int eB=nMotorEncoder[motorB]; int eC=nMotorEncoder[motorC]; if ((e1[i] (e2[i] i++;](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/330739/slide-45.jpg)
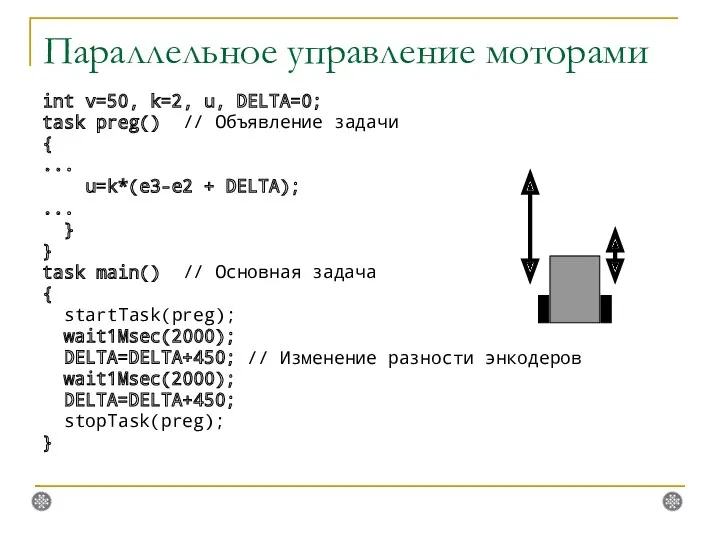
while(i {
int eB=nMotorEncoder[motorB];
int eC=nMotorEncoder[motorC];
if ((e1[i]<=eB+delta) &&
while(i
int eB=nMotorEncoder[motorB];
int eC=nMotorEncoder[motorC];
if ((e1[i]<=eB+delta) &&
 Программное обеспечение ПК
Программное обеспечение ПК Модификация базы данных студенты
Модификация базы данных студенты Open Cascade VPN. Installation and activation manual
Open Cascade VPN. Installation and activation manual CSS basics
CSS basics Электронные таблицы Excel 2007. Средства анализа данных
Электронные таблицы Excel 2007. Средства анализа данных Школа блогеров (инструкция)
Школа блогеров (инструкция) Игра. Условное представление.часть1
Игра. Условное представление.часть1 Значение коммуникации в управлении организацией
Значение коммуникации в управлении организацией Устройство компьютера. История развития вычислительной техники
Устройство компьютера. История развития вычислительной техники Безопасность персональных данных в сети Интернет
Безопасность персональных данных в сети Интернет Организация циклов на языке Pascal
Организация циклов на языке Pascal Применение информационных технологий для научных исследований в области земельного, природоресурсного, аграрного права
Применение информационных технологий для научных исследований в области земельного, природоресурсного, аграрного права Автоматизация процессного управления
Автоматизация процессного управления Компания Century Star Media Co
Компания Century Star Media Co Оформление цитат, списка литературы, библиографических ссылок
Оформление цитат, списка литературы, библиографических ссылок Графічні об’єкти в текстовому документі
Графічні об’єкти в текстовому документі Лабораторные работы
Лабораторные работы Как устроена книга
Как устроена книга Конфигурация Весовая ред. 3.0 на платформе 1С: Предприятие 8.3
Конфигурация Весовая ред. 3.0 на платформе 1С: Предприятие 8.3 Право и этика СМИ
Право и этика СМИ Использование интернет-банкинга
Использование интернет-банкинга Текстовые документы и технологии их создания. Обработка текстовой информации. Информатика и ИКТ. 8 класс
Текстовые документы и технологии их создания. Обработка текстовой информации. Информатика и ИКТ. 8 класс Обработка рисунков и фотографий Adobe Photoshop. Создание презентации PowerPoint
Обработка рисунков и фотографий Adobe Photoshop. Создание презентации PowerPoint Аутсорсинг логистики электронной торговли
Аутсорсинг логистики электронной торговли IP-адрес
IP-адрес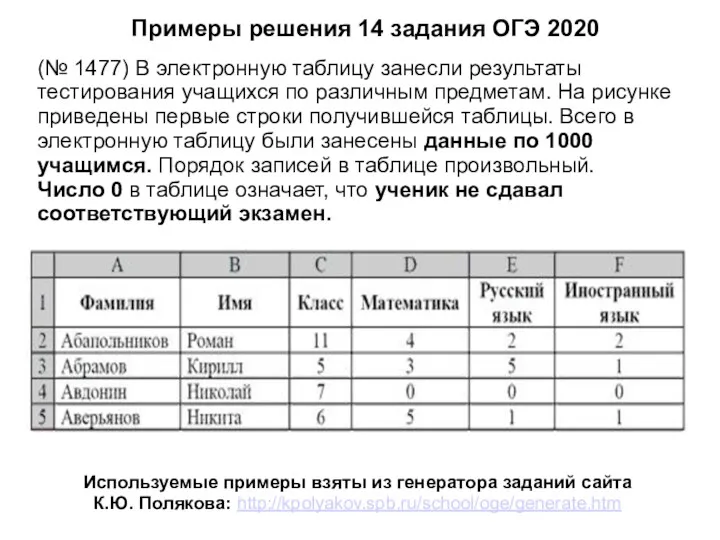 Примеры решения задания 14, ОГЭ по информатике
Примеры решения задания 14, ОГЭ по информатике Алгоритм и его свойства
Алгоритм и его свойства Технические каналы утечки акустической информации
Технические каналы утечки акустической информации