- Программируемые логические контроллеры

Содержание
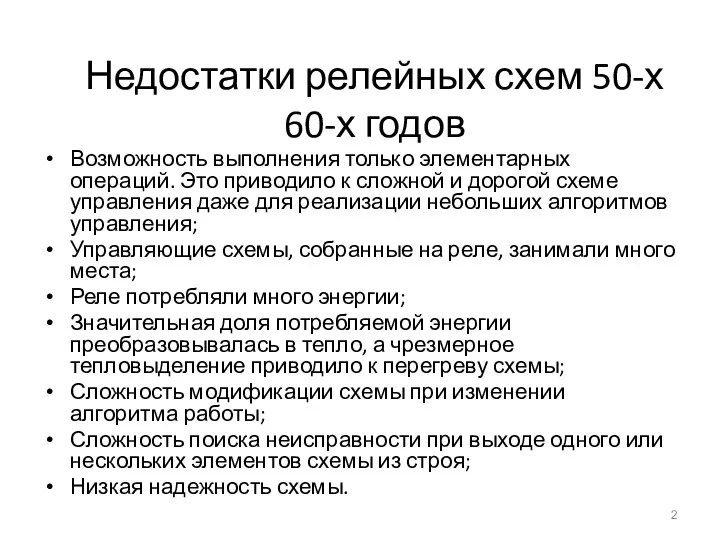
- 2. Недостатки релейных схем 50-х 60-х годов Возможность выполнения только элементарных операций. Это приводило к сложной и
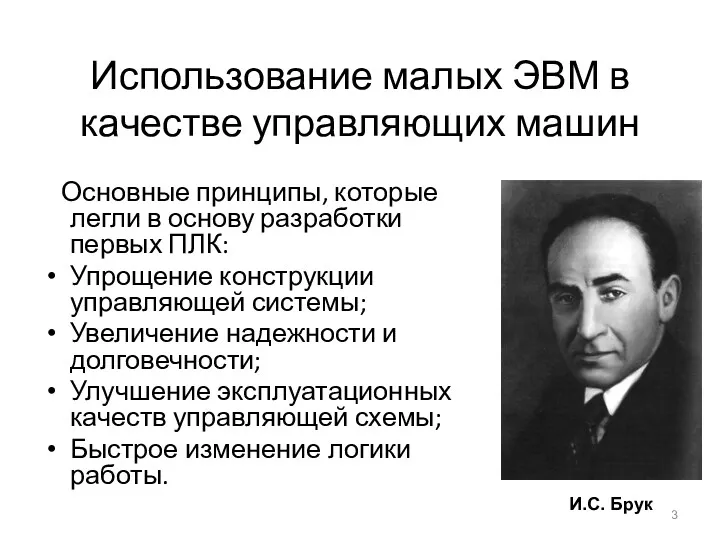
- 3. Использование малых ЭВМ в качестве управляющих машин Основные принципы, которые легли в основу разработки первых ПЛК:
- 4. История развития ПЛК 1968 год - GM Hydramatic (подразделение General Motors) сформулированы требования к стандартному контроллеру
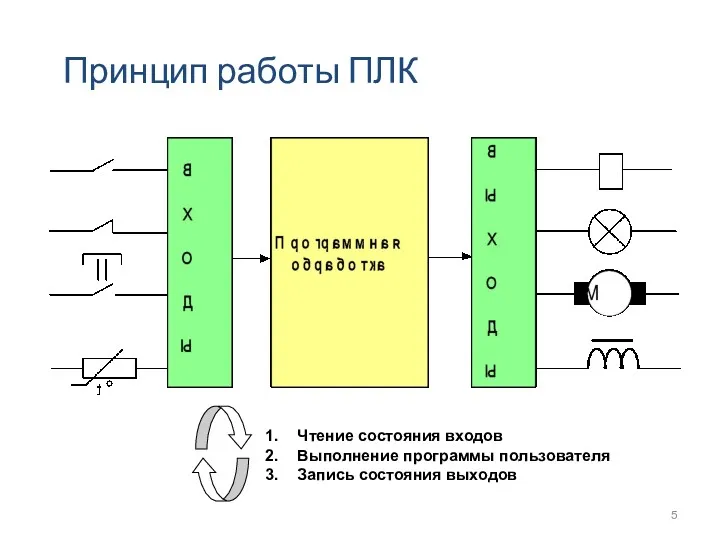
- 5. Принцип работы ПЛК Чтение состояния входов Выполнение программы пользователя Запись состояния выходов
- 6. аналоговые дискретные специализированные предназначены для работы с конкретными специфическими датчиками, требующими определенных уровней сигналов, питания и
- 7. Определение ПЛК Программируемый логический контроллер (ПЛК, PLC) – это программно управляемый дискретный автомат, имеющий некоторое множество
- 8. Функциональные возможности сбор информации с первичных датчиков состояния объекта, измерение параметров, логическая и цифровая обработки сигналов
- 9. Область применения ПЛК Промышленность Энергетика Транспорт Связь Коммунальное хозяйство Строительство И др.
- 10. Основные достоинства ПЛК Переносимость программ благодаря стандартизации языков программирования Широкие функциональные возможности Возможность быстрой замены Простота
- 11. Режим реального времени Существует временной порог, при превышении которого наступают необратимые катастрофические последствия С увеличением времени
- 12. Время реакции ПЛК Время реакции системы – это время с момента изменения состояния системы до момента
- 13. Устройство ПЛК Моноблочные Модульные Распределенные
- 14. Множество модулей расширения и специального назначения делятся по типам на следующие группы: Источник опорного напряжения; Модули
- 15. Системное программное обеспечение Системное программное обеспечение (СПО) – контролирует аппаратные средства ПЛК. – отвечает за тестирование
- 16. Прикладное программное обеспечение Прикладное программное обеспечение (ППО) – создается пользователем ПЛК при помощи системы программирования. Перепрограммирование
- 17. Инструменты программирования ПЛК
- 18. Инструменты комплексов программирования ПЛК Встроенные редакторы: классические ассемблеры и компиляторы для перевода текста в код. Текстовые
- 19. Условия работы ПЛК Температура Влажность Удары Вибрация Коррозионно-активная газовая среда Минеральная и металлическая пыль Электромагнитные помехи
- 20. Интеграция ПЛК в АСУТП
- 21. ПЛК ЭЛСИ-ТМ
- 23. Условное обозначение модулей
- 24. Модули процессорные TC 505 P300 ETH Е Процессор Pentium - 300 128 Мбайт ОЗУ 128 Мбайт
- 25. Модули дискретного ввода TD 501L 32I 024DC – 32 дискретных входа разделены на две гальванические группы
- 26. Модули дискретного вывода TD 502L 32O 024DC – 32 дискретных выхода разделенных на 2 канала; напряжение
- 27. Модули аналогового ввода TА 516 8IDC
- 28. Интерфейсные модули TN 503 COM 485
- 29. Источники питания TP 503 024 DC
- 30. Коммутационные панели TK 501 4 – панель на 4 модуля ввода-вывода TK 501 4R – панель
- 31. Коммутационные панели
- 32. ПЛК ПЛК универсального типа Ориентированы на решение задач в различных областях. Специализированные ПЛК Ориентированы на оптимальное
- 34. Скачать презентацию
Недостатки релейных схем 50-х 60-х годов
Возможность выполнения только элементарных операций. Это
Недостатки релейных схем 50-х 60-х годов
Возможность выполнения только элементарных операций. Это
Использование малых ЭВМ в качестве управляющих машин
Основные принципы, которые легли
Использование малых ЭВМ в качестве управляющих машин
Основные принципы, которые легли
История развития ПЛК
1968 год - GM Hydramatic (подразделение General Motors) сформулированы
История развития ПЛК
1968 год - GM Hydramatic (подразделение General Motors) сформулированы
Принцип работы ПЛК
Чтение состояния входов
Выполнение программы пользователя
Запись состояния выходов
Принцип работы ПЛК
Чтение состояния входов
Выполнение программы пользователя
Запись состояния выходов
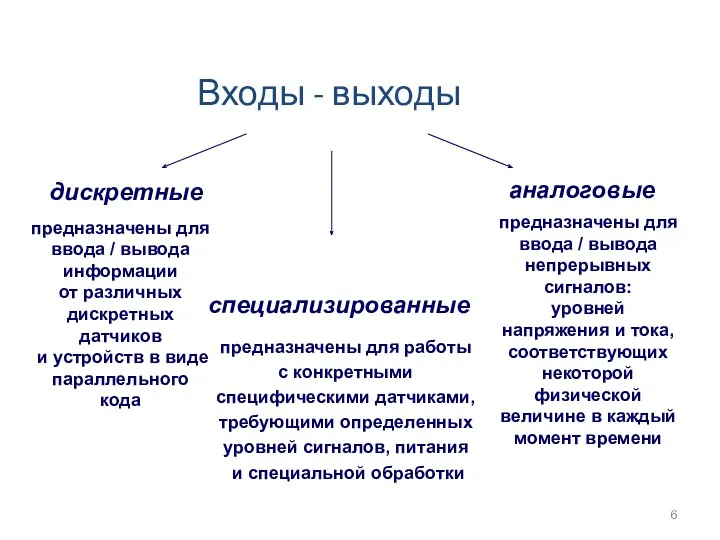
аналоговые
дискретные
специализированные
предназначены для работы
с конкретными
специфическими датчиками,
требующими определенных
уровней сигналов, питания
и
аналоговые
дискретные
специализированные
предназначены для работы
с конкретными
специфическими датчиками,
требующими определенных
уровней сигналов, питания
и
Определение ПЛК
Программируемый логический контроллер (ПЛК, PLC)
– это программно управляемый дискретный
Определение ПЛК
Программируемый логический контроллер (ПЛК, PLC)
– это программно управляемый дискретный
Функциональные возможности
сбор информации с первичных датчиков состояния объекта,
измерение параметров,
логическая
Функциональные возможности
сбор информации с первичных датчиков состояния объекта,
измерение параметров,
логическая

Область применения ПЛК
Промышленность
Энергетика
Транспорт
Связь
Коммунальное хозяйство
Строительство
И
Область применения ПЛК
Промышленность
Энергетика
Транспорт
Связь
Коммунальное хозяйство
Строительство
И
Основные достоинства ПЛК
Переносимость программ благодаря стандартизации
языков программирования
Широкие функциональные
Основные достоинства ПЛК
Переносимость программ благодаря стандартизации
языков программирования
Широкие функциональные
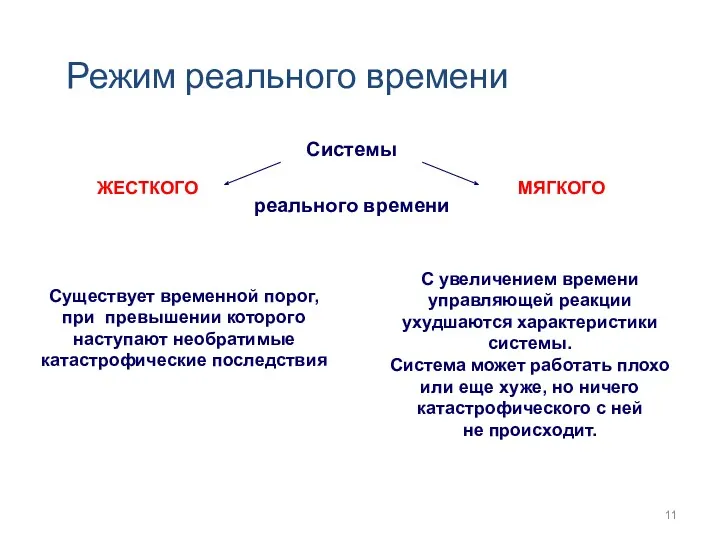
Режим реального времени
Существует временной порог, при превышении которого наступают необратимые катастрофические
Режим реального времени
Существует временной порог, при превышении которого наступают необратимые катастрофические
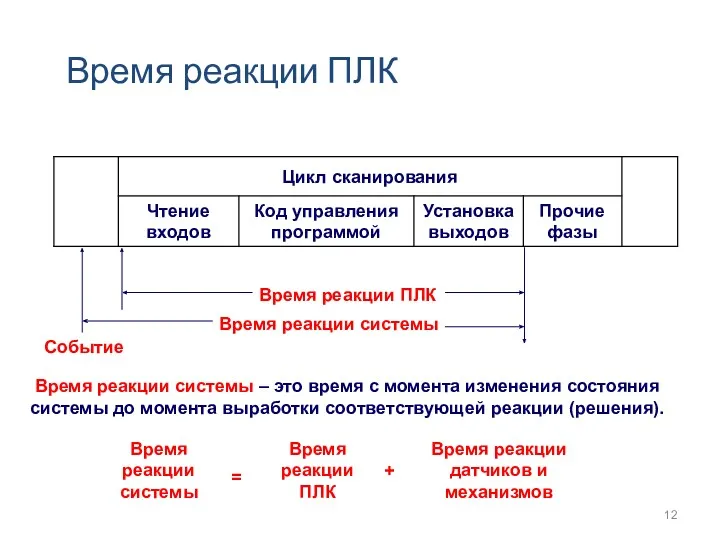
Время реакции ПЛК
Время реакции системы – это время с момента изменения
Время реакции ПЛК
Время реакции системы – это время с момента изменения

Устройство ПЛК
Моноблочные
Модульные
Распределенные
Устройство ПЛК
Моноблочные
Модульные
Распределенные
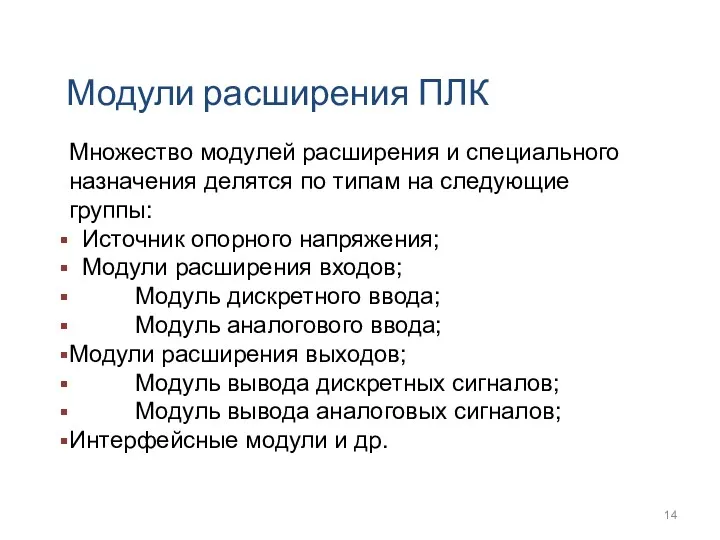
Множество модулей расширения и специального назначения делятся по типам на следующие
Множество модулей расширения и специального назначения делятся по типам на следующие
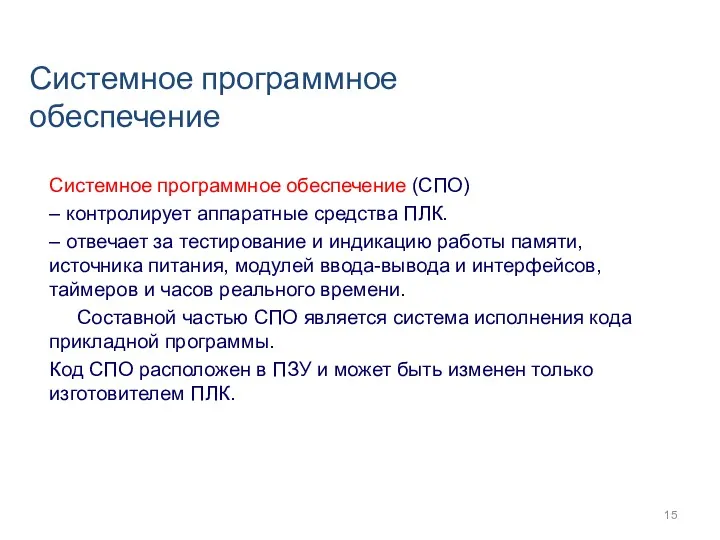
Системное программное обеспечение
Системное программное обеспечение (СПО)
– контролирует аппаратные средства ПЛК.
Системное программное обеспечение
Системное программное обеспечение (СПО)
– контролирует аппаратные средства ПЛК.
Прикладное программное обеспечение
Прикладное программное обеспечение (ППО) – создается пользователем ПЛК при
Прикладное программное обеспечение
Прикладное программное обеспечение (ППО) – создается пользователем ПЛК при
Инструменты программирования ПЛК
Инструменты программирования ПЛК
Инструменты комплексов программирования ПЛК
Встроенные редакторы: классические ассемблеры и компиляторы для перевода
Инструменты комплексов программирования ПЛК
Встроенные редакторы: классические ассемблеры и компиляторы для перевода
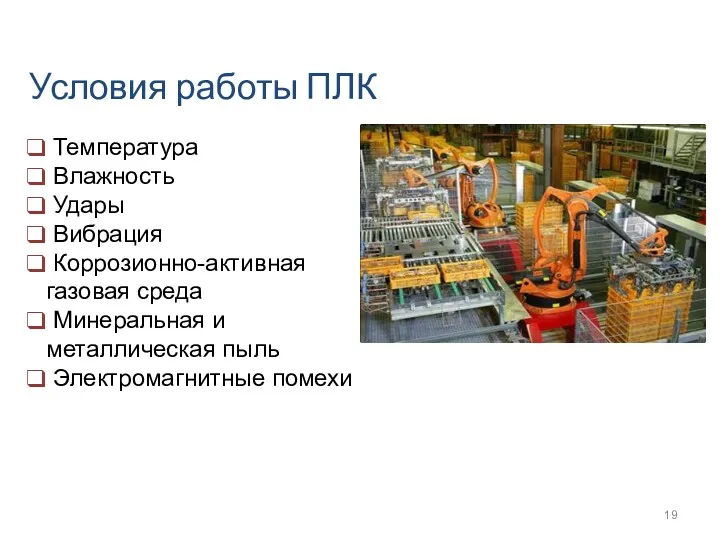
Условия работы ПЛК
Температура
Влажность
Удары
Вибрация
Коррозионно-активная газовая среда
Минеральная
Условия работы ПЛК
Температура
Влажность
Удары
Вибрация
Коррозионно-активная газовая среда
Минеральная

Интеграция ПЛК в АСУТП
Интеграция ПЛК в АСУТП

ПЛК ЭЛСИ-ТМ
ПЛК ЭЛСИ-ТМ
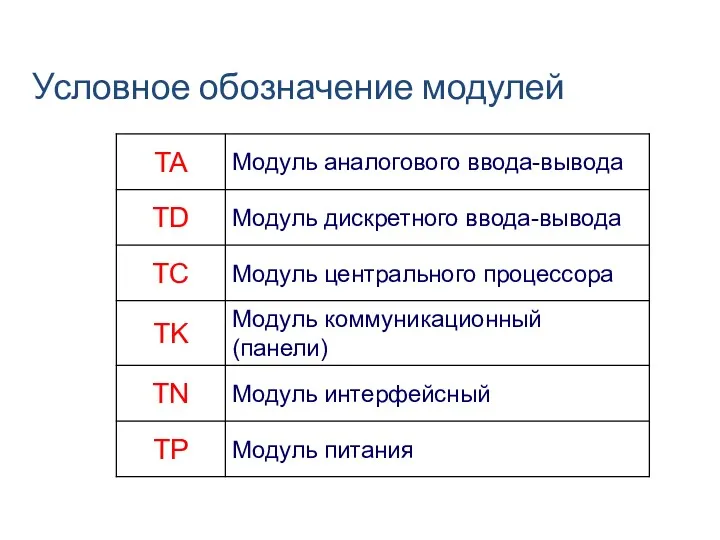
Условное обозначение модулей
Условное обозначение модулей

Модули процессорные
TC 505 P300 ETH Е
Процессор Pentium - 300
128 Мбайт ОЗУ
128
Модули процессорные
TC 505 P300 ETH Е
Процессор Pentium - 300
128 Мбайт ОЗУ
128

Модули дискретного ввода
TD 501L 32I 024DC – 32 дискретных входа
Модули дискретного ввода
TD 501L 32I 024DC – 32 дискретных входа

Модули дискретного вывода
TD 502L 32O 024DC – 32 дискретных выхода разделенных
Модули дискретного вывода
TD 502L 32O 024DC – 32 дискретных выхода разделенных
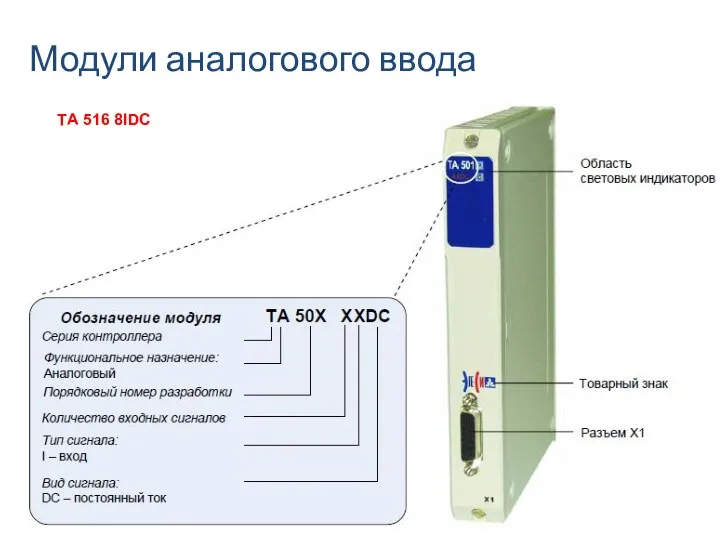
Модули аналогового ввода
TА 516 8IDC
Модули аналогового ввода
TА 516 8IDC

Интерфейсные модули
TN 503 COM 485
Интерфейсные модули
TN 503 COM 485

Источники питания
TP 503 024 DC
Источники питания
TP 503 024 DC
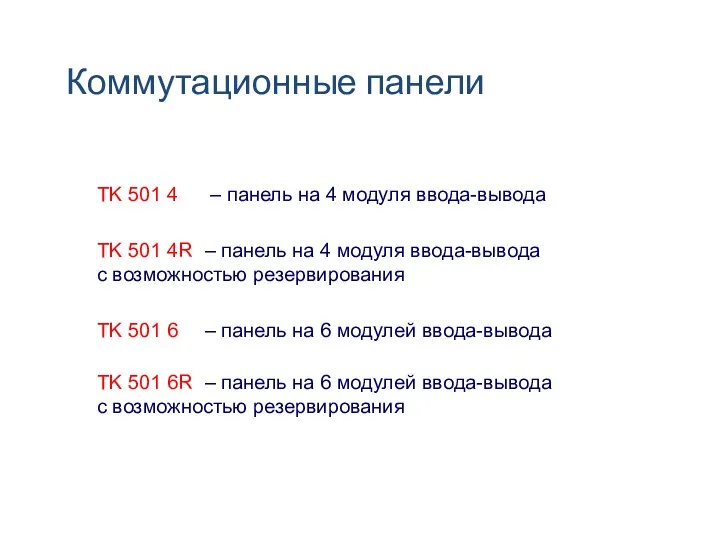
Коммутационные панели
TK 501 4 – панель на 4 модуля ввода-вывода
TK 501
Коммутационные панели
TK 501 4 – панель на 4 модуля ввода-вывода
TK 501

Коммутационные панели
Коммутационные панели

ПЛК
ПЛК универсального типа
Ориентированы на решение
задач в различных областях.
Специализированные ПЛК
Ориентированы на
ПЛК
ПЛК универсального типа
Ориентированы на решение
задач в различных областях.
Специализированные ПЛК
Ориентированы на
 Информационная безопасность
Информационная безопасность GSIS Инструкция пользователя (Для сервисного центра)
GSIS Инструкция пользователя (Для сервисного центра) Образовательный видео сервис
Образовательный видео сервис Microsoft Word кестелер, суреттер және су белгілерін енгізу
Microsoft Word кестелер, суреттер және су белгілерін енгізу Прерывания в системах DOS и BIOS. (Лекция 13)
Прерывания в системах DOS и BIOS. (Лекция 13) Powercode academy
Powercode academy Об’єкт event. Обробка подій
Об’єкт event. Обробка подій Внеклассное мероприятие по информатике. Анаграммы
Внеклассное мероприятие по информатике. Анаграммы Хранение однотипных данных. Массивы
Хранение однотипных данных. Массивы Корпоративные системы электронного документооборота. Обзор ECM решений
Корпоративные системы электронного документооборота. Обзор ECM решений Разработка Телеграм-бота для предприятия ООО “Элегия”
Разработка Телеграм-бота для предприятия ООО “Элегия” Каналы передачи информации
Каналы передачи информации Интернет-магазин подарков ручной работы
Интернет-магазин подарков ручной работы Исследование возможностей применения BIM-технологии в компьютерном дизайне (на примере интерьера загородного дома)
Исследование возможностей применения BIM-технологии в компьютерном дизайне (на примере интерьера загородного дома) Как варить подкасты
Как варить подкасты Adobe Illustrator программасының интерфейсі
Adobe Illustrator программасының интерфейсі Основные алгоритмические конструкции
Основные алгоритмические конструкции Распространенные форматы графических файлов, их преимущества, недостатки и области применения
Распространенные форматы графических файлов, их преимущества, недостатки и области применения Оформление списка литературы. Библиографические БД
Оформление списка литературы. Библиографические БД Назначение блоков персонального компьютера (ПК)
Назначение блоков персонального компьютера (ПК) Хранение информации. Память человека и память человечества. Оперативная и долговременная память. Файлы и папки. (5 класс)
Хранение информации. Память человека и память человечества. Оперативная и долговременная память. Файлы и папки. (5 класс) Microsoft excel Терезесіне шолу
Microsoft excel Терезесіне шолу World Wide Web – Всемирная Паутина
World Wide Web – Всемирная Паутина Знания. Конкурс Интеллектуальная собственность глазами молодежи
Знания. Конкурс Интеллектуальная собственность глазами молодежи Інтелектуальний аналіз даних
Інтелектуальний аналіз даних Операционные системы для мобильных устройств
Операционные системы для мобильных устройств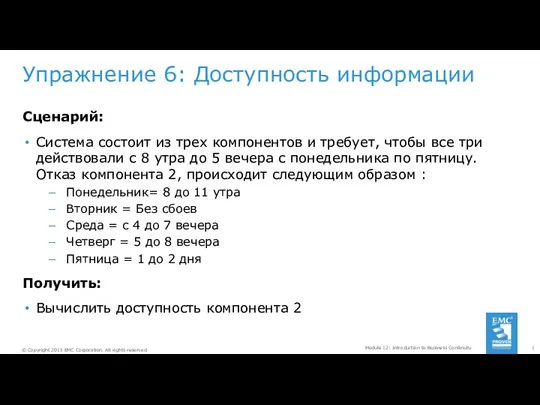 Упражнение 6: Доступность информации
Упражнение 6: Доступность информации Обработка текстовой информации. Текстовый редактор
Обработка текстовой информации. Текстовый редактор