- Реализация взаимодействия процессов

Содержание
- 2. Взаимодействие процессов взаимодействие в рамках локальной ЭВМ (одной ОС) взаимодействие в рамках сети родственные процессы произвольные
- 3. Сигналы работа процесса Примеры сигналов SIGINT (2) SIGQUIT (3) SIGKILL (9) SIGALRM (14) SIGCHLD (18) Сигнал
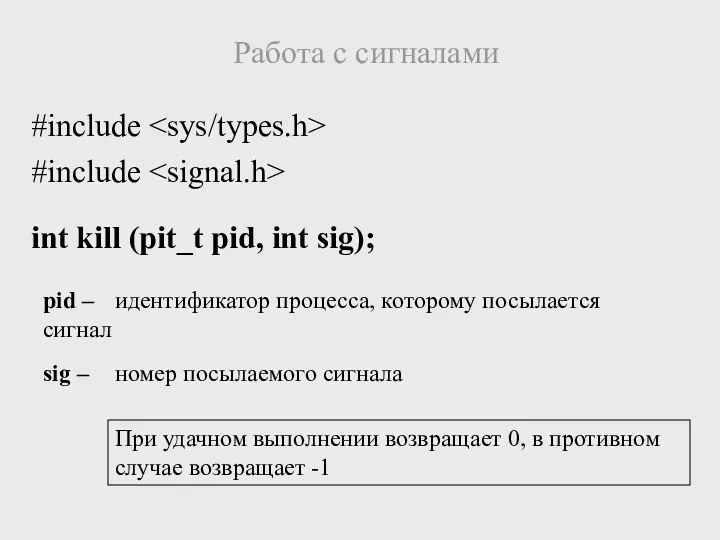
- 4. #include #include int kill (pit_t pid, int sig); Работа с сигналами pid – идентификатор процесса, которому
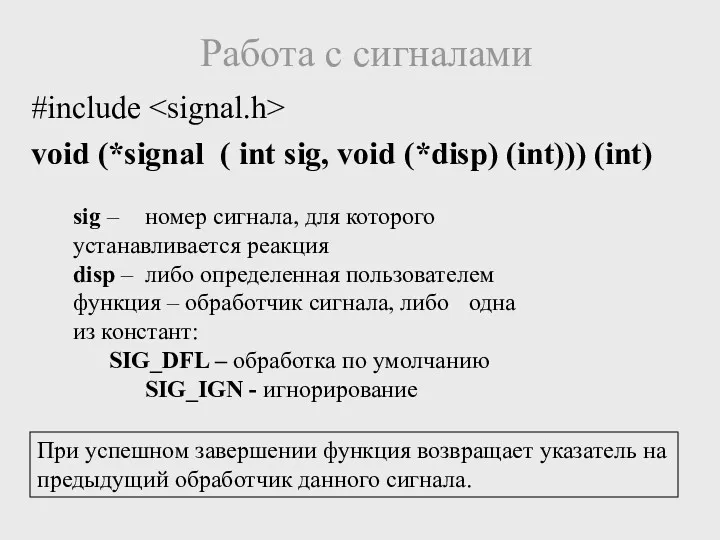
- 5. Работа с сигналами #include void (*signal ( int sig, void (*disp) (int))) (int) sig – номер
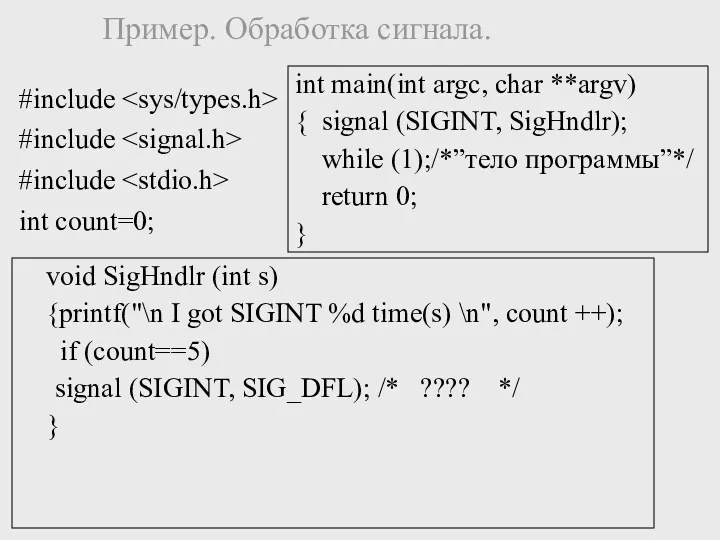
- 6. #include #include #include int count=0; Пример. Обработка сигнала. void SigHndlr (int s) {printf("\n I got SIGINT
- 7. Пример. Программа “будильник”. int main(int argc, char **argv) { char s[80]; signal(SIGALRM, alrm); alarm(5); printf(“Введите имя
- 8. Пример. Двухпроцессный вариант программы “будильник”. #include #include #include #include void alr(int s) { printf(“\n Быстрее!!! \n”);
- 9. Пример. Двухпроцессный вариант программы “будильник”. /*”отец”*/ for (;;) { sleep(5); kill(pid, SIGALRM); } /*”сын”*/ printf(“Введите имя
- 10. Неименованные каналы.
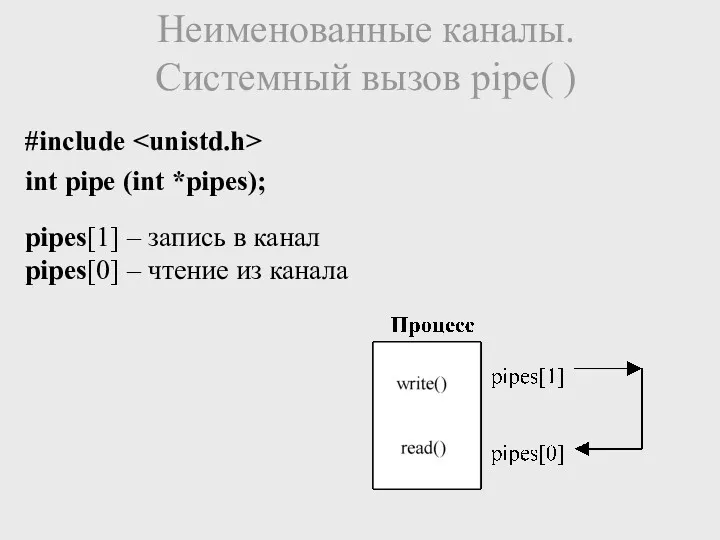
- 11. #include int pipe (int *pipes); Неименованные каналы. Системный вызов pipe( ) pipes[1] – запись в канал
- 12. Пример. Использование канала. int main(int argc, char **argv) { char *s=”chanel”; char buf[80]; int pipes[2]; pipe(pipes);
- 13. Пример. Типовая схема взаимодействия процессов с использованием канала. int main(int argc, char **argv) { int fd[2];
- 14. Пример. Реализация конвейера. #include int main(int argc, char **argv) { int fd[2]; pipe(fd); if(fork() == 0)
- 15. #include #include #include #include #include #include #define MAX_CNT 100 int target_pid, cnt; int fd[2]; int status;
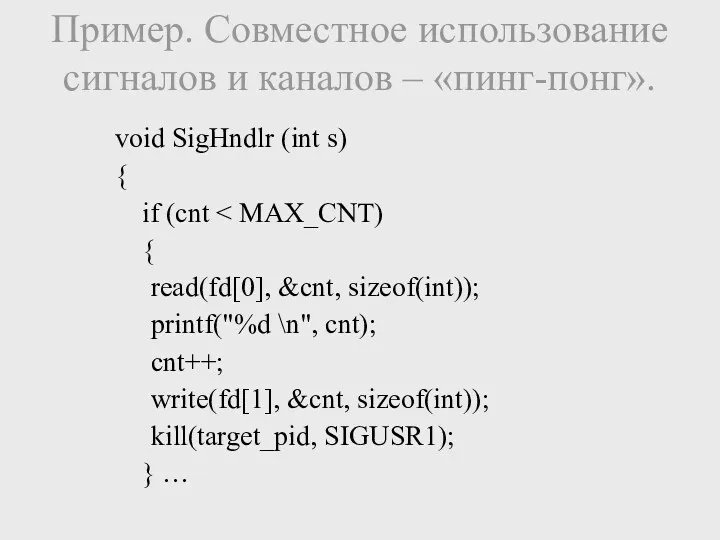
- 16. Пример. Совместное использование сигналов и каналов – «пинг-понг». void SigHndlr (int s) { if (cnt {
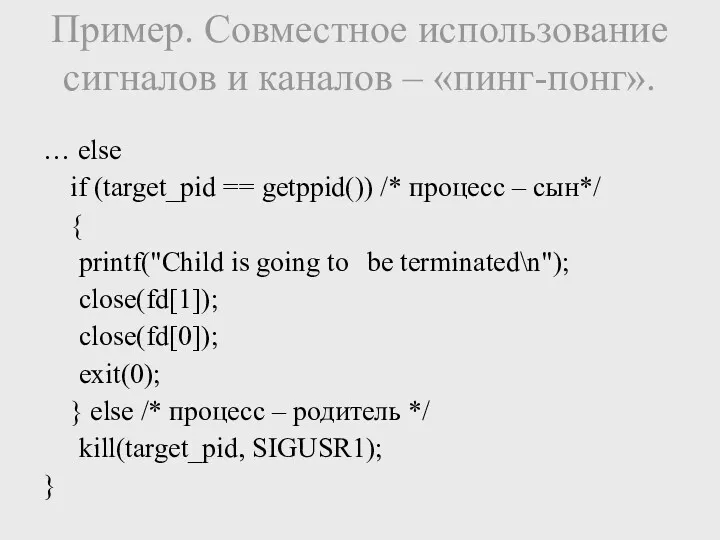
- 17. Пример. Совместное использование сигналов и каналов – «пинг-понг». … else if (target_pid == getppid()) /* процесс
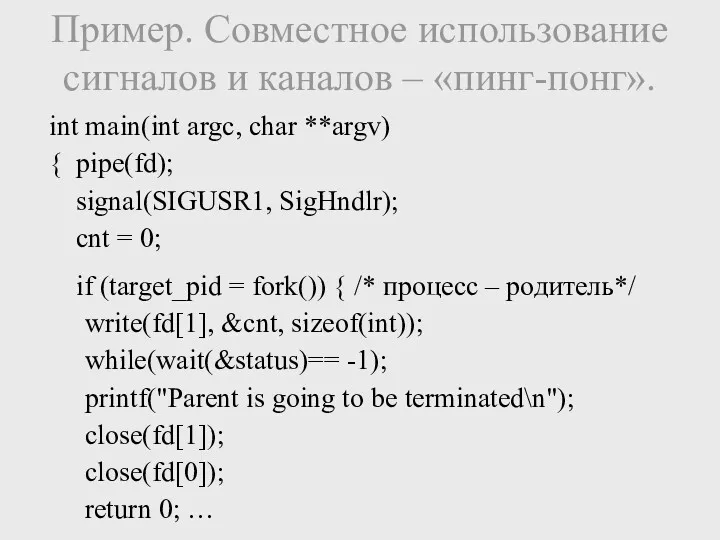
- 18. Пример. Совместное использование сигналов и каналов – «пинг-понг». int main(int argc, char **argv) { pipe(fd); signal(SIGUSR1,
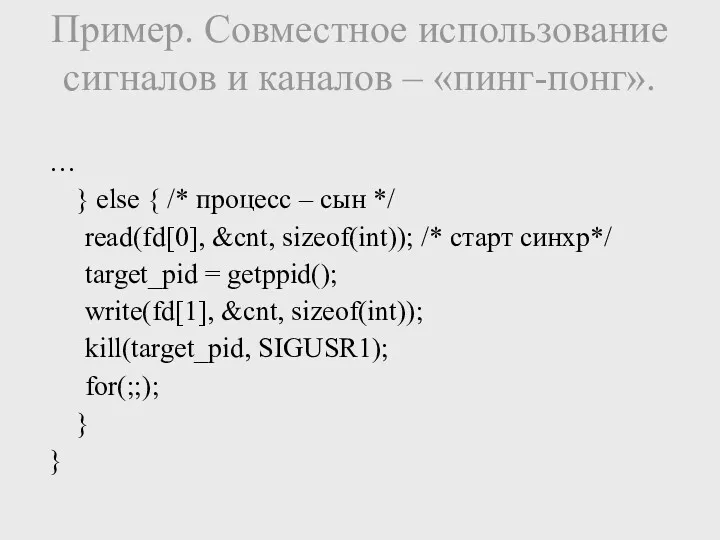
- 19. Пример. Совместное использование сигналов и каналов – «пинг-понг». … } else { /* процесс – сын
- 20. Именованные каналы.
- 21. int mkfifo (char *pathname, mode_t mode); Именованные каналы. Создание. pathname – имя создаваемого канала mode –
- 22. Пример. «Клиент-сервер». Процесс-сервер: #include #include #include #include
- 23. Пример. «Клиент-сервер». Процесс-сервер: int main(int argc, char **argv) { int fd; int pid; mkfifo("fifo", FILE_MODE |
- 24. Пример. «Клиент-сервер». Процесс-клиент: int main(int argc, char **argv) { int fd; int pid = getpid( );
- 25. Взаимодействие «главный-подчинённый».
- 26. Главный - Подчиненный #include int ptrace(int cmd, int pid, int addr, int data); cmd – код
- 27. Главный - Подчиненный int ptrace(int cmd, int pid, int addr, int data); cmd – код команды:
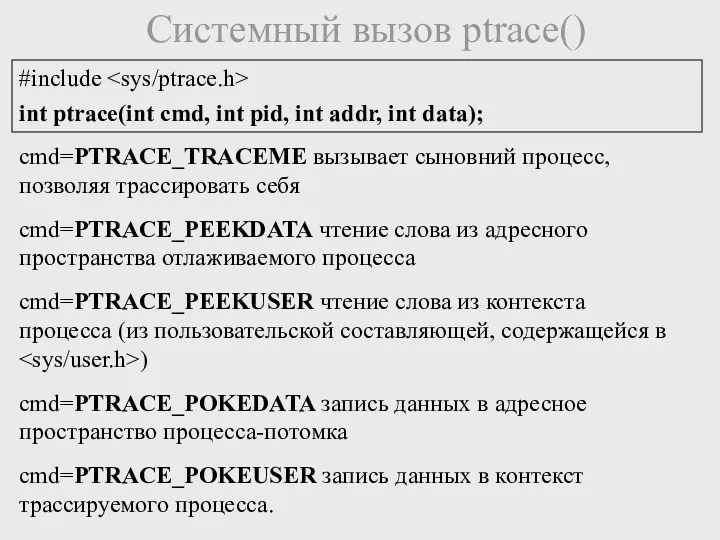
- 28. Системный вызов ptrace() #include int ptrace(int cmd, int pid, int addr, int data); cmd=PTRACE_TRACEME вызывает сыновний
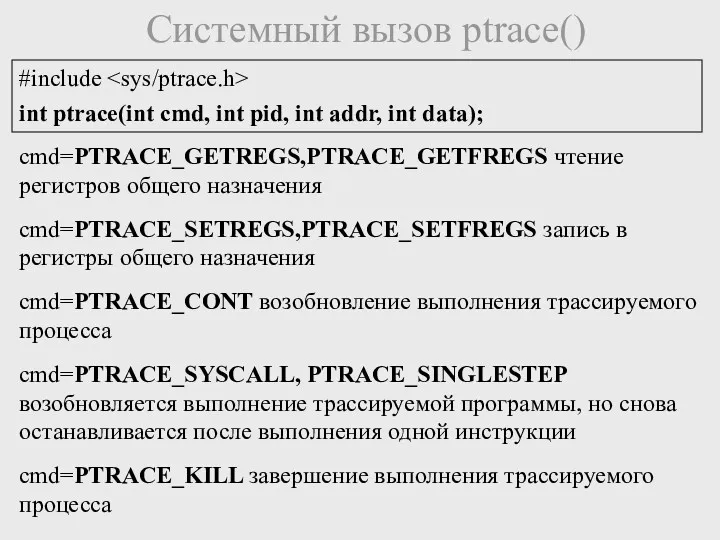
- 29. Системный вызов ptrace() #include int ptrace(int cmd, int pid, int addr, int data); cmd=PTRACE_GETREGS,PTRACE_GETFREGS чтение регистров
- 30. Общая схема трассировки процессов
- 31. Схема установки контрольной точки по адресу ABrPnt Установка контрольной точки Статус отлаживаемого процесса (ОП) ВЫПОЛНЕНИЕ послать
- 32. Пример. int main(int argc, char **argv) { return argc/0; } #include #include #include #include #include #include
- 33. Пример. int main(int argc, char *argv[]) { pid_t pid; int status; struct user_regs_struct REG; if ((pid
- 35. Скачать презентацию
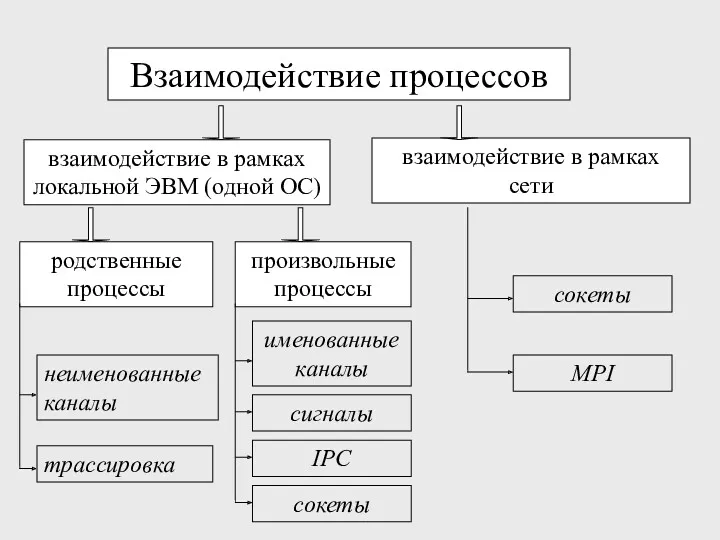
Взаимодействие процессов
взаимодействие в рамках локальной ЭВМ (одной ОС)
взаимодействие в рамках сети
родственные
Взаимодействие процессов
взаимодействие в рамках локальной ЭВМ (одной ОС)
взаимодействие в рамках сети
родственные
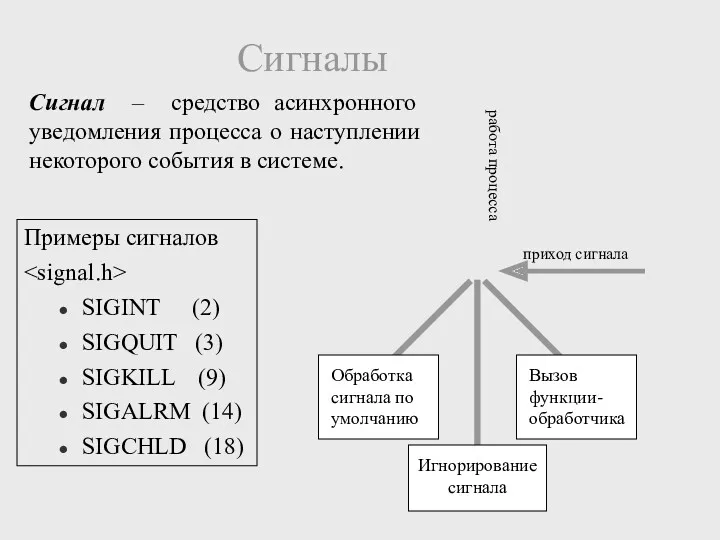
Сигналы
работа процесса
Примеры сигналов
SIGINT (2)
SIGQUIT (3)
SIGKILL (9)
SIGALRM (14)
SIGCHLD (18)
Сигнал – средство асинхронного
Сигналы
работа процесса
Примеры сигналов Сигнал – средство асинхронного
SIGINT (2)
SIGQUIT (3)
SIGKILL (9)
SIGALRM (14)
SIGCHLD (18)
#include
#include
int kill (pit_t pid, int sig);
Работа с сигналами
pid
#include Работа с сигналами pid
#include
int kill (pit_t pid, int sig);
Работа с сигналами
#include
void (*signal ( int sig, void (*disp) (int)))
Работа с сигналами
#include
void (*signal ( int sig, void (*disp) (int)))
#include
#include
#include
int count=0;
Пример. Обработка сигнала.
void SigHndlr (int s)
{printf("\n I
#include Пример. Обработка сигнала. void SigHndlr (int s)
#include
#include
int count=0;
{printf("\n I
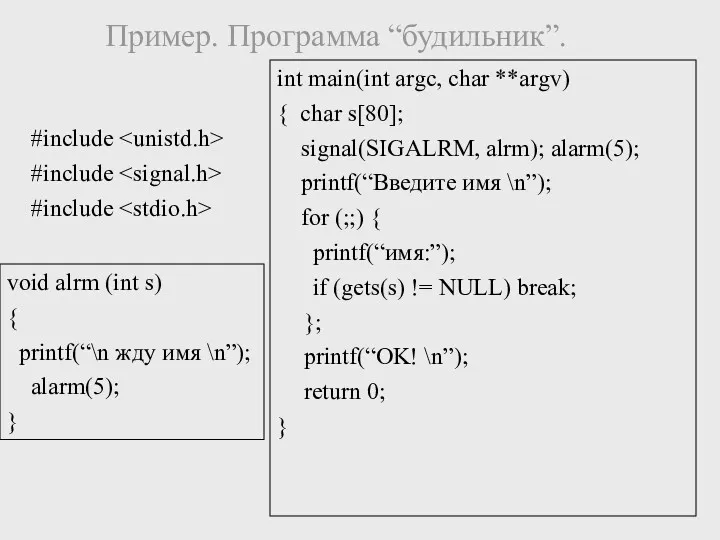
Пример. Программа “будильник”.
int main(int argc, char **argv)
{ char s[80];
signal(SIGALRM, alrm);
Пример. Программа “будильник”.
int main(int argc, char **argv)
{ char s[80];
signal(SIGALRM, alrm);
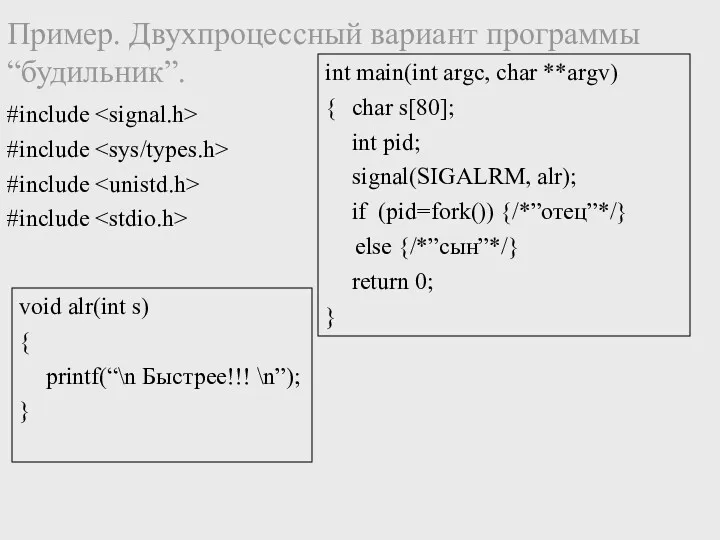
Пример. Двухпроцессный вариант программы “будильник”.
#include
#include
#include
#include
void alr(int
Пример. Двухпроцессный вариант программы “будильник”.
#include void alr(int
#include
#include
#include
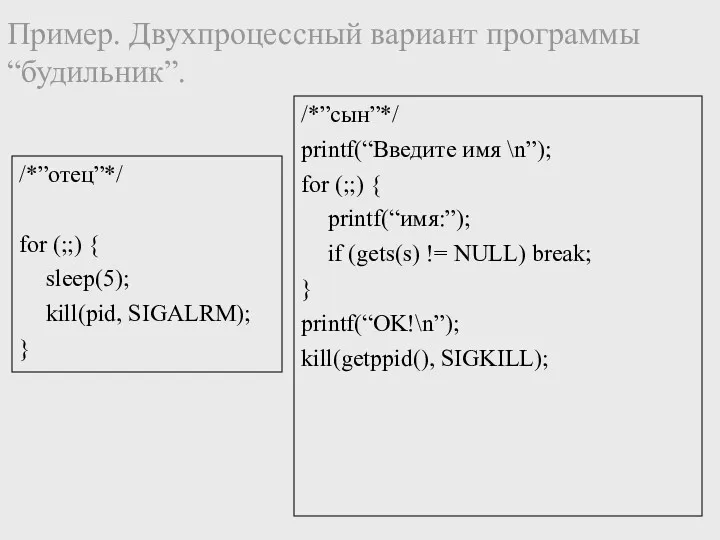
Пример. Двухпроцессный вариант программы “будильник”.
/*”отец”*/
for (;;) {
sleep(5);
kill(pid, SIGALRM);
}
/*”сын”*/
printf(“Введите имя \n”);
for (;;)
Пример. Двухпроцессный вариант программы “будильник”.
/*”отец”*/
for (;;) {
sleep(5);
kill(pid, SIGALRM);
}
/*”сын”*/
printf(“Введите имя \n”);
for (;;)

Неименованные каналы.
Неименованные каналы.
#include
int pipe (int *pipes);
Неименованные каналы. Системный вызов pipe( )
pipes[1] –
#include Неименованные каналы. Системный вызов pipe( ) pipes[1] –
int pipe (int *pipes);
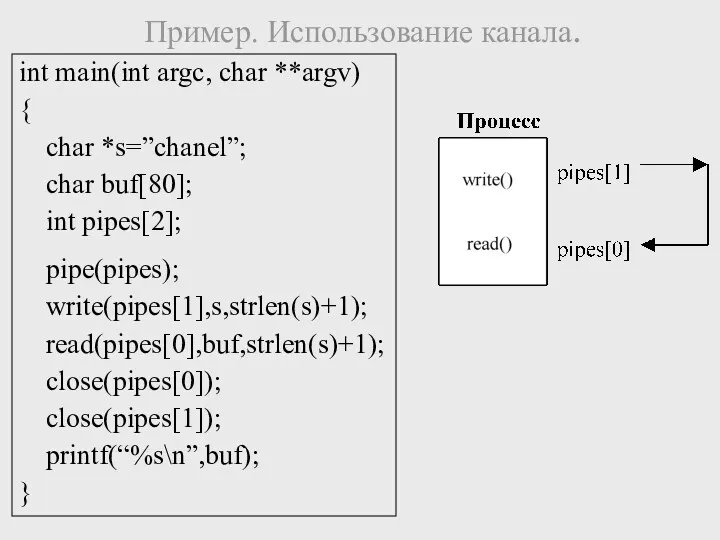
Пример. Использование канала.
int main(int argc, char **argv)
{
char *s=”chanel”;
char buf[80];
int pipes[2];
pipe(pipes);
write(pipes[1],s,strlen(s)+1);
read(pipes[0],buf,strlen(s)+1);
close(pipes[0]);
close(pipes[1]);
printf(“%s\n”,buf);
}
Пример. Использование канала.
int main(int argc, char **argv)
{
char *s=”chanel”;
char buf[80];
int pipes[2];
pipe(pipes);
write(pipes[1],s,strlen(s)+1);
read(pipes[0],buf,strlen(s)+1);
close(pipes[0]);
close(pipes[1]);
printf(“%s\n”,buf);
}
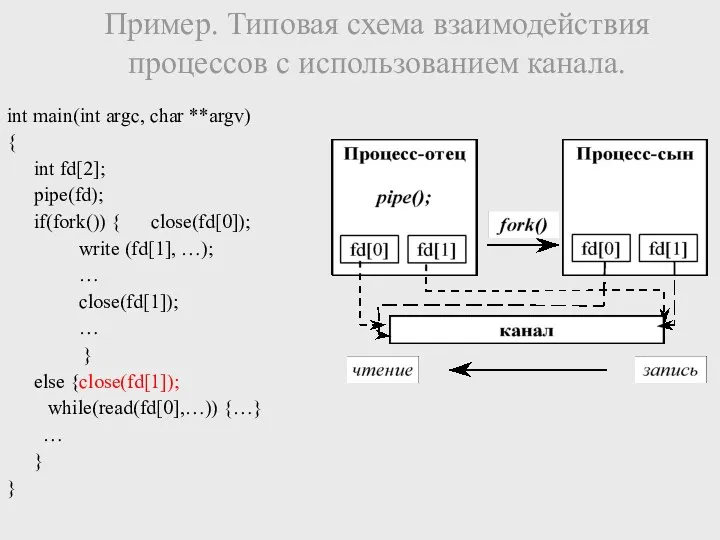
Пример. Типовая схема взаимодействия процессов с использованием канала.
int main(int argc, char
Пример. Типовая схема взаимодействия процессов с использованием канала.
int main(int argc, char
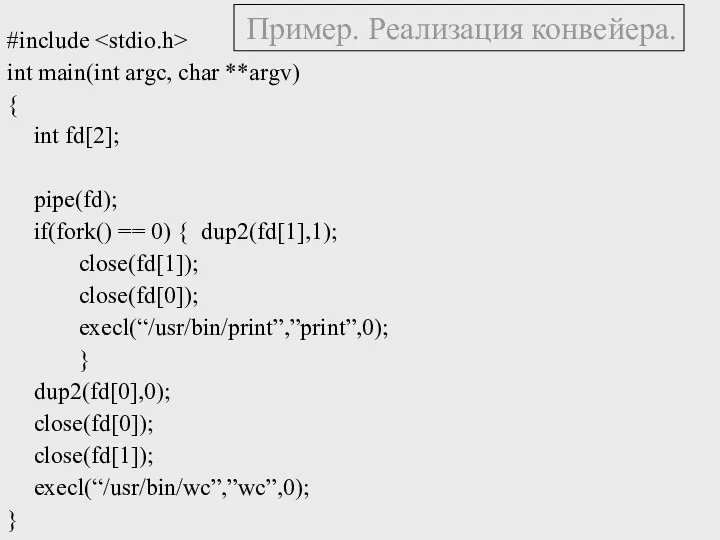
Пример. Реализация конвейера.
#include
int main(int argc, char **argv)
{
int fd[2];
pipe(fd);
if(fork() ==
Пример. Реализация конвейера.
#include
int main(int argc, char **argv)
{
int fd[2];
pipe(fd);
if(fork() ==

#include
#include
#include
#include
#include
#include
#define MAX_CNT 100
int target_pid, cnt;
int
#include
#include
#include
#include
#include
#include
#define MAX_CNT 100
int target_pid, cnt;
int
Пример. Совместное использование сигналов и каналов – «пинг-понг».
void SigHndlr (int s)
Пример. Совместное использование сигналов и каналов – «пинг-понг».
void SigHndlr (int s)
Пример. Совместное использование сигналов и каналов – «пинг-понг».
… else
if (target_pid ==
Пример. Совместное использование сигналов и каналов – «пинг-понг».
… else
if (target_pid ==
Пример. Совместное использование сигналов и каналов – «пинг-понг».
int main(int argc, char
Пример. Совместное использование сигналов и каналов – «пинг-понг».
int main(int argc, char
Пример. Совместное использование сигналов и каналов – «пинг-понг».
…
} else { /*
Пример. Совместное использование сигналов и каналов – «пинг-понг».
…
} else { /*
Именованные каналы.
Именованные каналы.
int mkfifo (char *pathname, mode_t mode);
Именованные каналы. Создание.
pathname – имя создаваемого канала
mode
int mkfifo (char *pathname, mode_t mode);
Именованные каналы. Создание.
pathname – имя создаваемого канала
mode
Пример. «Клиент-сервер».
Процесс-сервер:
#include
#include
#include
#include
Пример. «Клиент-сервер».
Процесс-сервер:
#include
#include
#include
#include
Пример. «Клиент-сервер».
Процесс-сервер:
int main(int argc, char **argv)
{ int fd;
int pid;
mkfifo("fifo", FILE_MODE
Пример. «Клиент-сервер».
Процесс-сервер:
int main(int argc, char **argv)
{ int fd;
int pid;
mkfifo("fifo", FILE_MODE
Пример. «Клиент-сервер».
Процесс-клиент:
int main(int argc, char **argv)
{
int fd;
int pid = getpid( );
fd
Пример. «Клиент-сервер».
Процесс-клиент:
int main(int argc, char **argv)
{
int fd;
int pid = getpid( );
fd
Взаимодействие
«главный-подчинённый».
Взаимодействие
«главный-подчинённый».
Главный - Подчиненный
#include
int ptrace(int cmd, int pid, int addr, int
Главный - Подчиненный
#include
int ptrace(int cmd, int pid, int addr, int
Главный - Подчиненный
int ptrace(int cmd, int pid, int addr, int data);
cmd
Главный - Подчиненный
int ptrace(int cmd, int pid, int addr, int data);
cmd
Системный вызов ptrace()
#include
int ptrace(int cmd, int pid, int addr, int
Системный вызов ptrace()
#include
int ptrace(int cmd, int pid, int addr, int
Системный вызов ptrace()
#include
int ptrace(int cmd, int pid, int addr, int
Системный вызов ptrace()
#include
int ptrace(int cmd, int pid, int addr, int
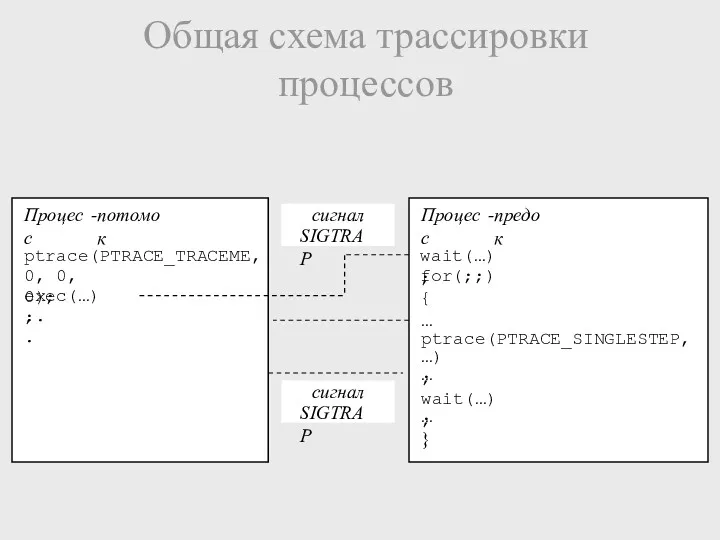
Общая схема трассировки процессов
Общая схема трассировки процессов
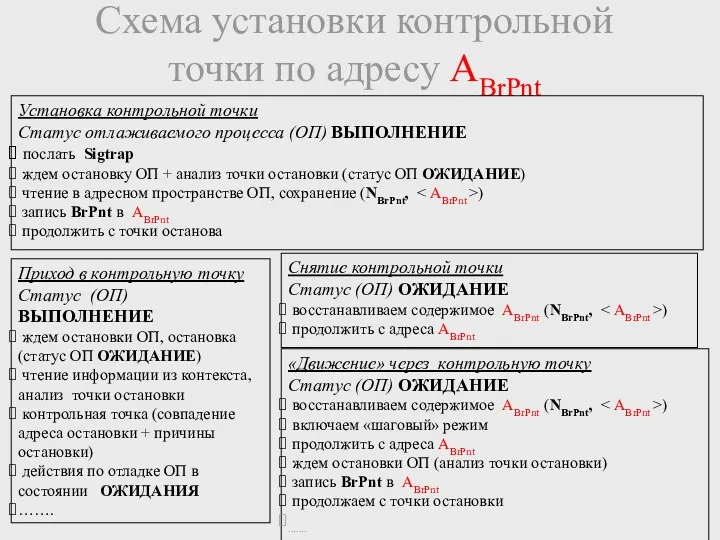
Схема установки контрольной точки по адресу ABrPnt
Установка контрольной точки
Статус отлаживаемого процесса
Схема установки контрольной точки по адресу ABrPnt
Установка контрольной точки
Статус отлаживаемого процесса
Пример.
int main(int argc, char **argv)
{
return argc/0;
}
#include
#include
#include
#include
#include
Пример.
int main(int argc, char **argv)
{
return argc/0;
}
#include
#include
#include
#include
#include
![Пример. int main(int argc, char *argv[]) { pid_t pid; int](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/253067/slide-32.jpg)
Пример.
int main(int argc, char *argv[])
{
pid_t pid;
int status;
struct user_regs_struct REG;
if ((pid =
Пример.
int main(int argc, char *argv[])
{
pid_t pid;
int status;
struct user_regs_struct REG;
if ((pid =
 Управление данными. Язык SQL (лекция 6)
Управление данными. Язык SQL (лекция 6) Компьютерная графика
Компьютерная графика BIOS FW SOP For win7
BIOS FW SOP For win7 Алфавитный подход к определению количества информации
Алфавитный подход к определению количества информации Язык программирования С++
Язык программирования С++ Компьютерные манипуляторы
Компьютерные манипуляторы The computer and I: pros and cons
The computer and I: pros and cons Основы управления данными
Основы управления данными Разработка урока Кодирование информации
Разработка урока Кодирование информации Многофункциональный Telegram-бот
Многофункциональный Telegram-бот Технология разработки и защиты баз данных
Технология разработки и защиты баз данных Интернет
Интернет История становления и развития теории систем
История становления и развития теории систем Анализ бизнес-процессов средствами BPwin
Анализ бизнес-процессов средствами BPwin Finite state machines and VHDL
Finite state machines and VHDL Система подогрева тепловоза Рубин
Система подогрева тепловоза Рубин PHP #1.1. Введение. Быстрый старт
PHP #1.1. Введение. Быстрый старт Теория игр. Камни
Теория игр. Камни Арифметические операции в позиционных системах счисления
Арифметические операции в позиционных системах счисления Функции в Python
Функции в Python Создание мобильного приложения для пользователей ЖКХ
Создание мобильного приложения для пользователей ЖКХ Исполнитель Робот. Линейные алгоритмы
Исполнитель Робот. Линейные алгоритмы Создание базы данных. Информационные системы и базы данных
Создание базы данных. Информационные системы и базы данных Технологии и методологии проектирования ИС
Технологии и методологии проектирования ИС Арифметические операции в системах счисления
Арифметические операции в системах счисления Информатика и информация
Информатика и информация Оператор switch
Оператор switch Спеціалізовані мови програмування Python
Спеціалізовані мови програмування Python