Риски сбоя в КС. Определения. Переключательный процесс. Гонки по входу. Статические, динамические и функциональные риски сбоя презентация
- Риски сбоя в КС. Определения. Переключательный процесс. Гонки по входу. Статические, динамические и функциональные риски сбоя

Содержание
- 2. Введение Цифровые устройства, устройства ВТ в настоящее время широко используются во всех отраслях: связь, телевидение, управление
- 3. Введение Особенностью разработки устройств и систем ВТ является то, что разработчик имеет дело не с идеальными
- 4. Проблема состязаний (гонок) В схемотехническом плане проблема функциональной устойчивости может быть сведена к устранению опасных состязаний
- 5. Реальные логические элементы
- 6. Реальные логические элементы
- 7. Реальные логические элементы Уровни на входе ЛЭ Уровни на выходе ЛЭ Передаточная функция ЛЭ
- 8. Реальные логические элементы
- 9. Реальные логические элементы
- 10. Реальные логические элементы
- 11. Логические элементы на ЭМ переключателях 2И-НЕ 2ИЛИ-НЕ «Дребезг» контактов: (D_)
- 12. Реальные логические элементы
- 13. Риски сбоя в комбинационных схемах Определения: Риск сбоя - возможность появления на выходе цифрового устройства сигнала,
- 14. Риски сбоя в комбинационных схемах Определения: Состязания (гонки) сигналов - процесс распространения сигналов в различных цепях
- 15. Риски сбоя в комбинационных схемах Определения: Неопасные состязания – которые не могут привести в схеме к
- 16. Риски сбоя в комбинационных схемах Гонки по входу.
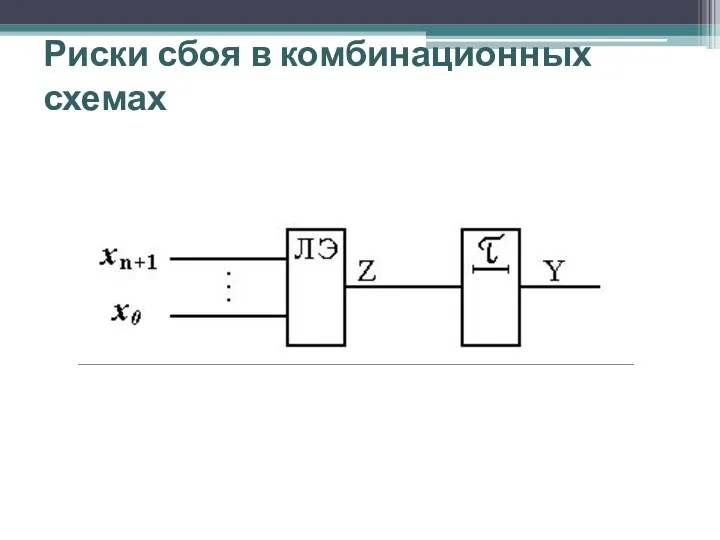
- 17. Риски сбоя в комбинационных схемах Определения: Изменение сигнала на каждом выходе схемы реально происходит не мгновенно,
- 18. Риски сбоя в комбинационных схемах
- 19. Риски сбоя в комбинационных схемах Определения: Переключательный процесс - последовательность уровней “1” и “0” (импульсов и
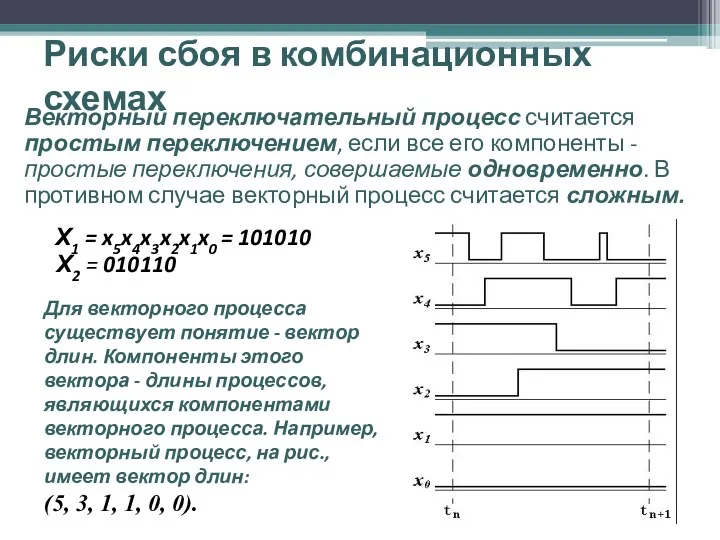
- 20. Риски сбоя в комбинационных схемах Векторный переключательный процесс считается простым переключением, если все его компоненты -
- 21. Риски сбоя в комбинационных схемах Событие - любое изменение логического сигнала, в том числе сложный переключательный
- 22. Риски сбоя в комбинационных схемах Задержки, связанные с логическими элементами и линиями связи, обычно называют паразитными
- 23. Риски сбоя в комбинационных схемах Под ‘τ’подразумевается паразитная задержка. Величину ‘τ’, а также моменты изменений входных
- 24. Деформирование выходных сигналов В различных частях комбинационной схемы в зависимости от числа последовательно включенных элементов переходный
- 25. Деформирование выходных сигналов
- 26. Статические риски сбоя На рис. показана работа элементов И и ИЛИ при подаче на их входы
- 27. Статические риски сбоя Риск сбоя называется статическим, если у(X1) = y(Х2), где y - булева функция.
- 28. Динамические риски сбоя На рис. а приведена схема, реализующая функцию у= x2x1 + x0. Пусть входной
- 29. Динамические риски сбоя Риск сбоя называется динамическим, если у(X1) ≠ y(Х2), где y - булева функция.
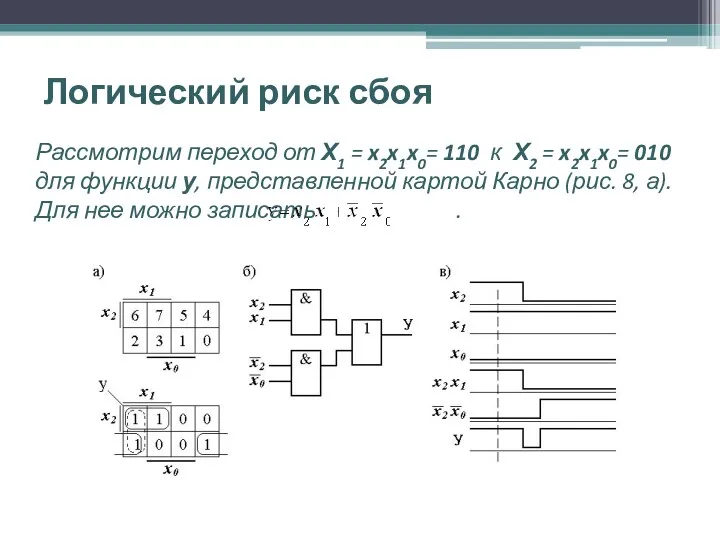
- 30. Логический риск сбоя Рассмотрим переход от Х1 = x2x1x0= 110 к Х2 = x2x1x0= 010 для
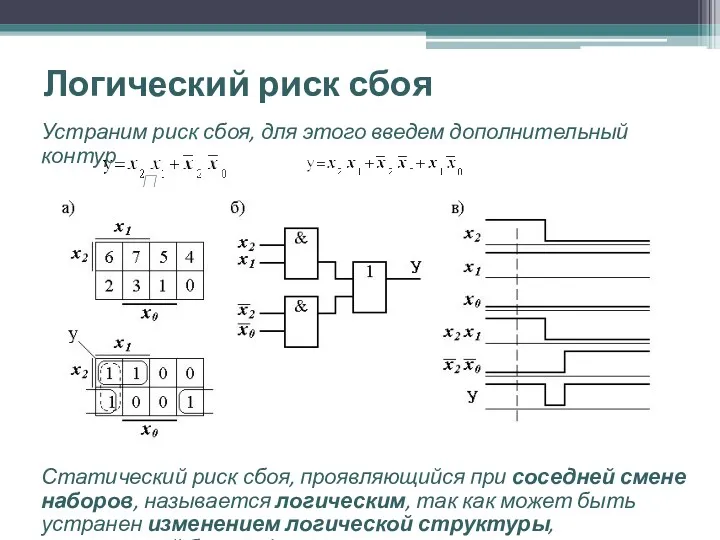
- 31. Логический риск сбоя Устраним риск сбоя, для этого введем дополнительный контур ? Статический риск сбоя, проявляющийся
- 32. Функциональный риск сбоя
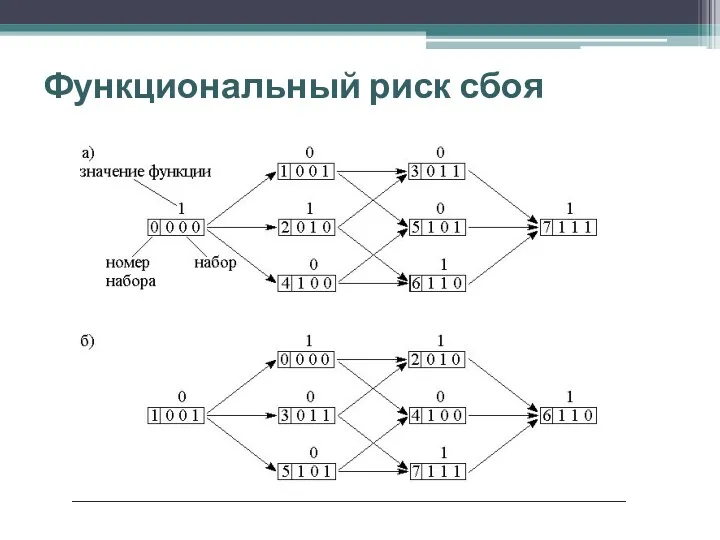
- 33. Функциональный риск сбоя Есть единственный путь смены наборов: 0 2 6 7, при котором не будет
- 35. Скачать презентацию

Введение
Цифровые устройства, устройства ВТ в настоящее время широко используются во
Введение
Цифровые устройства, устройства ВТ в настоящее время широко используются во
Введение
Особенностью разработки устройств и систем ВТ является то, что разработчик
Введение
Особенностью разработки устройств и систем ВТ является то, что разработчик
Проблема состязаний (гонок)
В схемотехническом плане проблема функциональной устойчивости может быть
Проблема состязаний (гонок)
В схемотехническом плане проблема функциональной устойчивости может быть

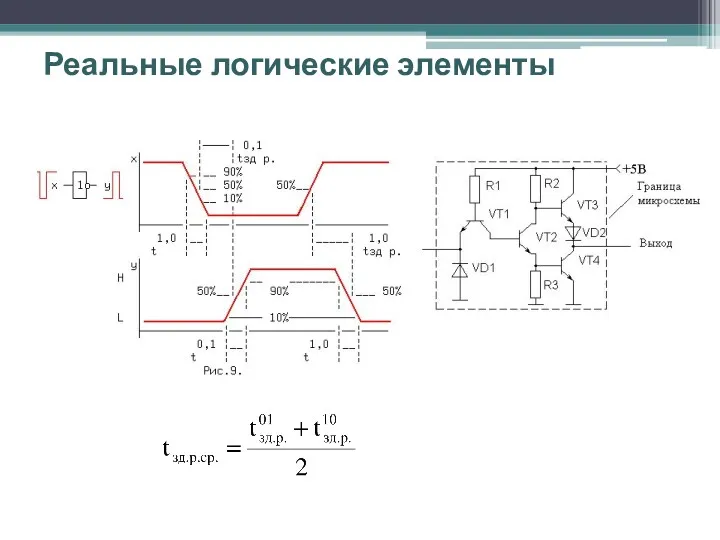
Реальные логические элементы
Реальные логические элементы
Реальные логические элементы
Реальные логические элементы
Реальные логические элементы
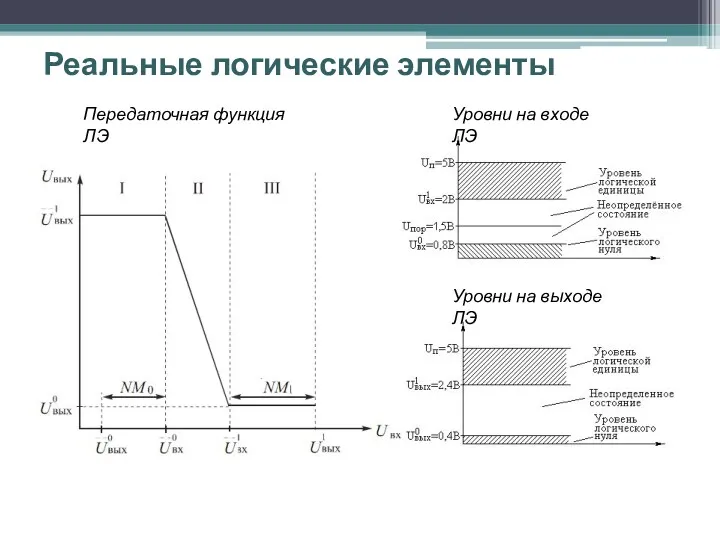
Уровни на входе ЛЭ
Уровни на выходе ЛЭ
Передаточная функция
Реальные логические элементы
Уровни на входе ЛЭ
Уровни на выходе ЛЭ
Передаточная функция

Реальные логические элементы
Реальные логические элементы

Реальные логические элементы
Реальные логические элементы

Реальные логические элементы
Реальные логические элементы

Логические элементы на ЭМ переключателях
2И-НЕ
2ИЛИ-НЕ
«Дребезг» контактов:
(D_)
Логические элементы на ЭМ переключателях
2И-НЕ
2ИЛИ-НЕ
«Дребезг» контактов:
(D_)

Реальные логические элементы
Реальные логические элементы
Риски сбоя в комбинационных схемах
Определения:
Риск сбоя - возможность появления на
Риски сбоя в комбинационных схемах
Определения:
Риск сбоя - возможность появления на

Риски сбоя в комбинационных схемах
Определения:
Состязания (гонки) сигналов - процесс распространения
Риски сбоя в комбинационных схемах
Определения:
Состязания (гонки) сигналов - процесс распространения
Риски сбоя в комбинационных схемах
Определения:
Неопасные состязания – которые не могут
Риски сбоя в комбинационных схемах
Определения:
Неопасные состязания – которые не могут
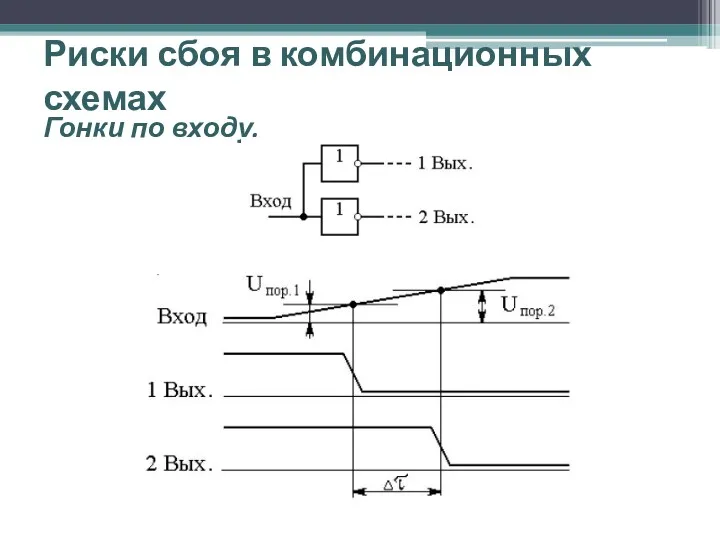
Риски сбоя в комбинационных схемах
Гонки по входу.
Риски сбоя в комбинационных схемах
Гонки по входу.
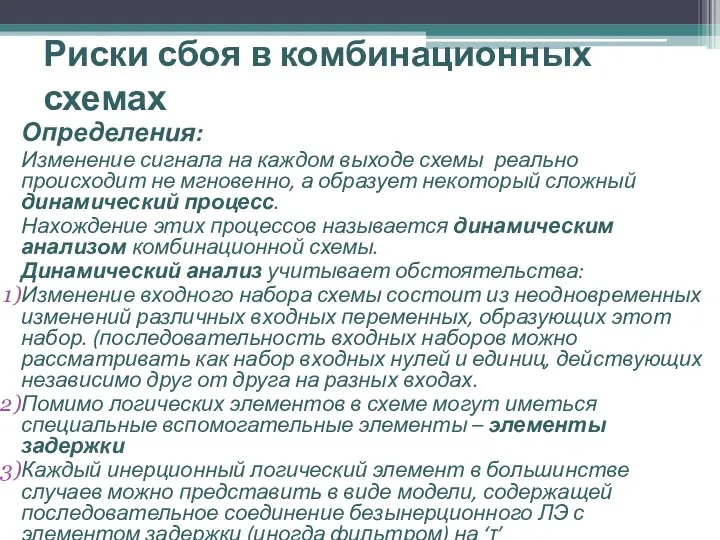
Риски сбоя в комбинационных схемах
Определения:
Изменение сигнала на каждом выходе схемы
Риски сбоя в комбинационных схемах
Определения:
Изменение сигнала на каждом выходе схемы
Риски сбоя в комбинационных схемах
Риски сбоя в комбинационных схемах
Риски сбоя в комбинационных схемах
Определения:
Переключательный процесс - последовательность уровней “1”
Риски сбоя в комбинационных схемах
Определения:
Переключательный процесс - последовательность уровней “1”
Риски сбоя в комбинационных схемах
Векторный переключательный процесс считается простым переключением, если
Риски сбоя в комбинационных схемах
Векторный переключательный процесс считается простым переключением, если
Риски сбоя в комбинационных схемах
Событие - любое изменение логического сигнала, в
Риски сбоя в комбинационных схемах
Событие - любое изменение логического сигнала, в

Риски сбоя в комбинационных схемах
Задержки, связанные с логическими элементами и линиями
Риски сбоя в комбинационных схемах
Задержки, связанные с логическими элементами и линиями

Риски сбоя в комбинационных схемах
Под ‘τ’подразумевается паразитная задержка. Величину ‘τ’, а
Риски сбоя в комбинационных схемах
Под ‘τ’подразумевается паразитная задержка. Величину ‘τ’, а
Деформирование выходных сигналов
В различных частях комбинационной схемы в зависимости от числа
Деформирование выходных сигналов
В различных частях комбинационной схемы в зависимости от числа

Деформирование выходных сигналов
Деформирование выходных сигналов
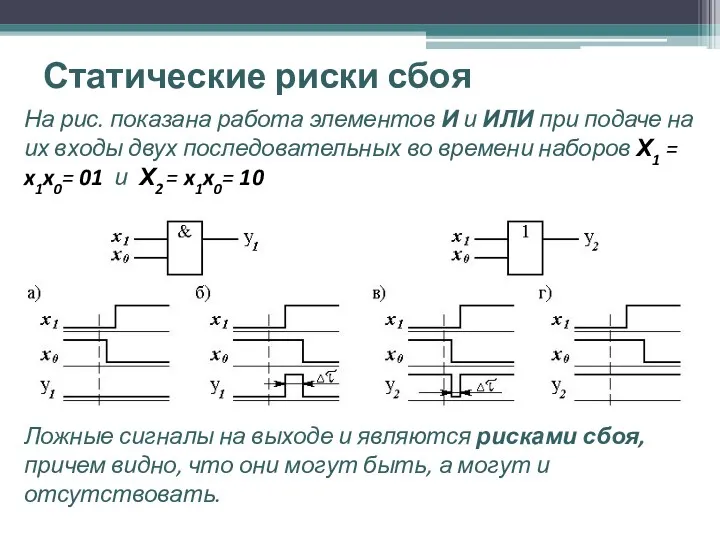
Статические риски сбоя
На рис. показана работа элементов И и ИЛИ при
Статические риски сбоя
На рис. показана работа элементов И и ИЛИ при
Статические риски сбоя
Риск сбоя называется статическим, если у(X1) = y(Х2), где
Статические риски сбоя
Риск сбоя называется статическим, если у(X1) = y(Х2), где
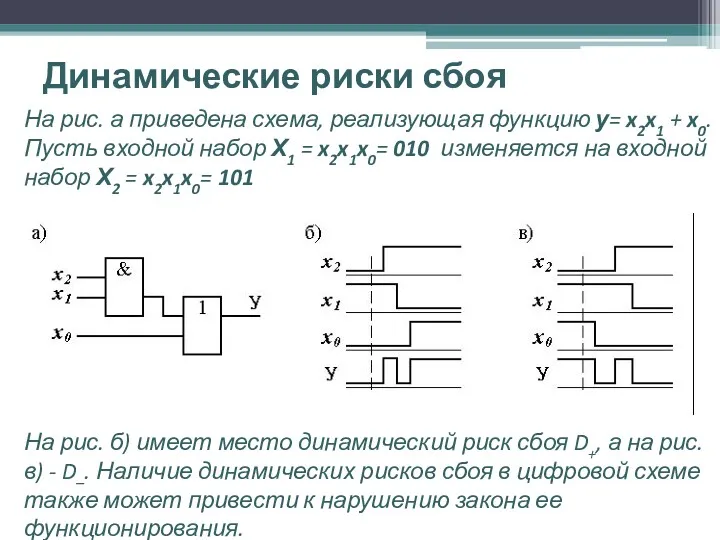
Динамические риски сбоя
На рис. а приведена схема, реализующая функцию у= x2x1
Динамические риски сбоя
На рис. а приведена схема, реализующая функцию у= x2x1
Динамические риски сбоя
Риск сбоя называется динамическим, если у(X1) ≠ y(Х2), где
Динамические риски сбоя
Риск сбоя называется динамическим, если у(X1) ≠ y(Х2), где
Логический риск сбоя
Рассмотрим переход от Х1 = x2x1x0= 110 к Х2
Логический риск сбоя
Рассмотрим переход от Х1 = x2x1x0= 110 к Х2
Логический риск сбоя
Устраним риск сбоя, для этого введем дополнительный контур
?
Статический риск
Логический риск сбоя
Устраним риск сбоя, для этого введем дополнительный контур
?
Статический риск
Функциональный риск сбоя
Функциональный риск сбоя
Функциональный риск сбоя
Есть единственный путь смены наборов: 0 2 6 7,
Функциональный риск сбоя
Есть единственный путь смены наборов: 0 2 6 7,
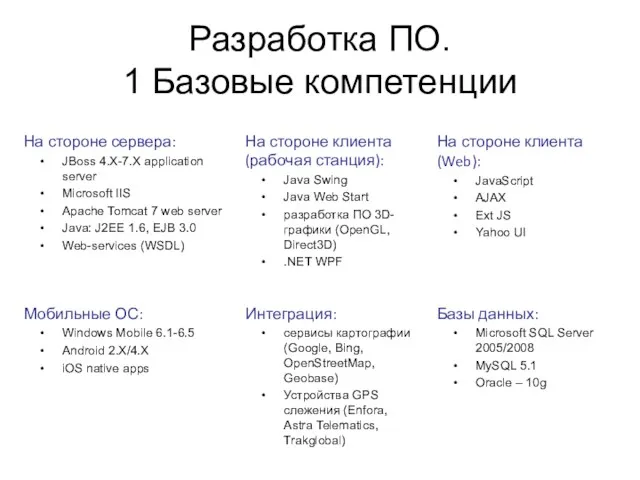 Разработка ПО. Базовые компетенции
Разработка ПО. Базовые компетенции Создание презентаций в Microsoft PowerPoint
Создание презентаций в Microsoft PowerPoint Основы медицинской информации и научной библиографии
Основы медицинской информации и научной библиографии Безопасность детей в интернете
Безопасность детей в интернете Интернет и всемирная паутина. Электронная почта
Интернет и всемирная паутина. Электронная почта Разработка информационной системы и математических моделей виртуального скрининга химических веществ
Разработка информационной системы и математических моделей виртуального скрининга химических веществ Порядок учета документов, входящих в состав библиотечного фонда
Порядок учета документов, входящих в состав библиотечного фонда Антивирусные программные средства
Антивирусные программные средства Программное обеспечение ПК
Программное обеспечение ПК Компьютерные сети
Компьютерные сети Моделі кольору
Моделі кольору Компьютерная графика (Autodesk 3ds max). Модификаторы. (Лекция 3.2)
Компьютерная графика (Autodesk 3ds max). Модификаторы. (Лекция 3.2) Подача запроса о предоставлении сведений ЕГРН на портале государственных услуг Росреестра
Подача запроса о предоставлении сведений ЕГРН на портале государственных услуг Росреестра Разработка крупного standalone проекта на Unity
Разработка крупного standalone проекта на Unity Поколения ЭВМ
Поколения ЭВМ Нейронные сети и нейросетевое управление. Лекция 12
Нейронные сети и нейросетевое управление. Лекция 12 Особенности электронной почты
Особенности электронной почты Киберспорт: плюсы и минусы
Киберспорт: плюсы и минусы Информационные технологии. Введение, определение, история. (Лекция 1)
Информационные технологии. Введение, определение, история. (Лекция 1) Моделирование в среде табличного процессора
Моделирование в среде табличного процессора Разработка сайта с применением Framework Bootstrap
Разработка сайта с применением Framework Bootstrap Поняття мови розмітки гіпертекстового документа
Поняття мови розмітки гіпертекстового документа Всероссийская акция Час кода
Всероссийская акция Час кода Инструкция к обнулению ЗН и КЗ
Инструкция к обнулению ЗН и КЗ Технологический слой
Технологический слой Диагностика и устранение неисправностей при работе в локальной сети
Диагностика и устранение неисправностей при работе в локальной сети Анализ излучения молекулярных слоев красителей и металлических наночастиц, перспективных для создания плазменных нанолазеров
Анализ излучения молекулярных слоев красителей и металлических наночастиц, перспективных для создания плазменных нанолазеров Система электронных дневников и журналов
Система электронных дневников и журналов