- Робот-спасатель ЯМ-1

Содержание
- 2. АКТУАЛЬНОСТЬ ДАННОЙ РАБОТЫ В нашем нестабильном мире происходят множество ЧС, где обычный человек не может справиться,
- 3. Описание проекта Внешний вид Проект состоит из: Корпуса робота. Шести колёсной базы. Дополнительная гусеничная платформа. Камера
- 4. Предложения по практическому использованию робота Робот «ЯМ-1» может использоваться практически во всех экстренных ситуациях, включающих данные
- 5. Научная, исследовательская, практическая проблема, которую решает представленный проект Решенные проблемы: Построение миниатюрных роботов. Автономное управление на
- 6. Описание основных результатов проекта Окончив проект, я пришел к выводу, что все поставленные передо мной проблемы
- 7. Оценка предпринимательской эффективности и коммерциализация проекта Мой проект достаточно рентабелен, т.к. на рынке не присутствуют большое
- 8. Схема модели
- 9. Описание этапов проекта 1. Поиск и выбор идеи проекта. 2. Разработка эскизов и первых чертежей. 3.
- 10. Используемое оборудование, материалы Оборудование: Паяльная станция (Зубр профессионал) и соответствующие расходники(припой и ортофосфорная кислота). Крестовые и
- 11. Навыки и источники полезной информации Математическая грамотность. Технические знания. Икт-грамотность. Естественно-научные знания. Творческое мышление. Умение делать
- 13. Скачать презентацию

АКТУАЛЬНОСТЬ ДАННОЙ РАБОТЫ
В нашем нестабильном мире происходят множество ЧС, где обычный
АКТУАЛЬНОСТЬ ДАННОЙ РАБОТЫ
В нашем нестабильном мире происходят множество ЧС, где обычный
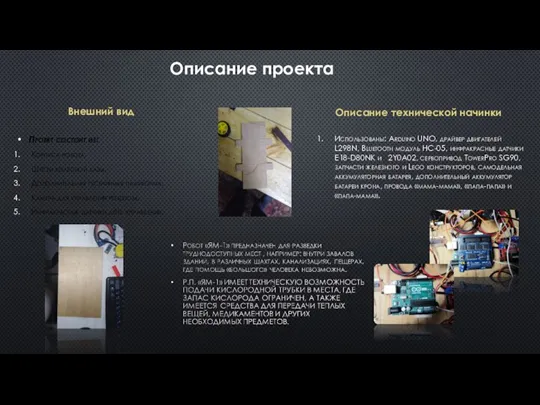
Описание проекта
Внешний вид
Проект состоит из:
Корпуса робота.
Шести колёсной базы.
Дополнительная гусеничная платформа.
Камера для
Описание проекта
Внешний вид
Проект состоит из:
Корпуса робота.
Шести колёсной базы.
Дополнительная гусеничная платформа.
Камера для
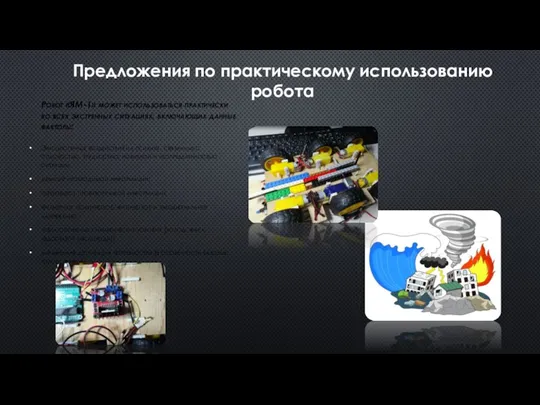
Предложения по практическому использованию робота
Робот «ЯМ-1» может использоваться практически во всех
Предложения по практическому использованию робота
Робот «ЯМ-1» может использоваться практически во всех
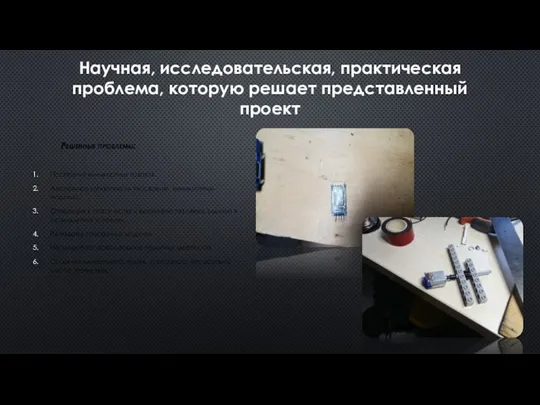
Научная, исследовательская, практическая проблема, которую решает представленный проект
Решенные проблемы:
Построение миниатюрных
Научная, исследовательская, практическая проблема, которую решает представленный проект
Решенные проблемы:
Построение миниатюрных
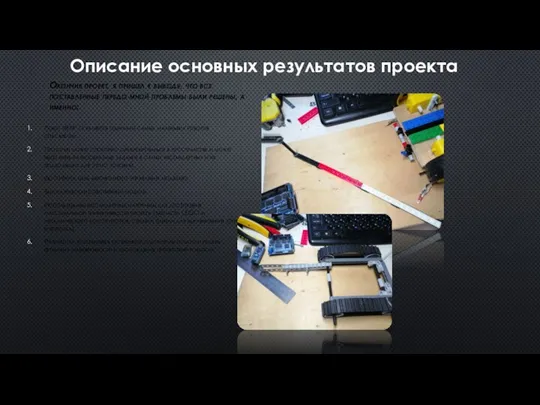
Описание основных результатов проекта
Окончив проект, я пришел к выводу, что все
Описание основных результатов проекта
Окончив проект, я пришел к выводу, что все
Оценка предпринимательской эффективности и коммерциализация проекта
Мой проект достаточно рентабелен, т.к.
Оценка предпринимательской эффективности и коммерциализация проекта
Мой проект достаточно рентабелен, т.к.
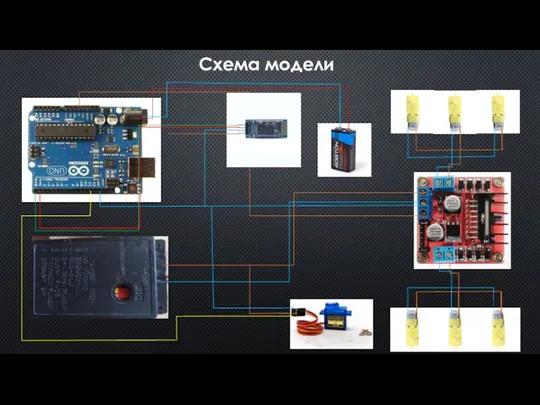
Схема модели
Схема модели
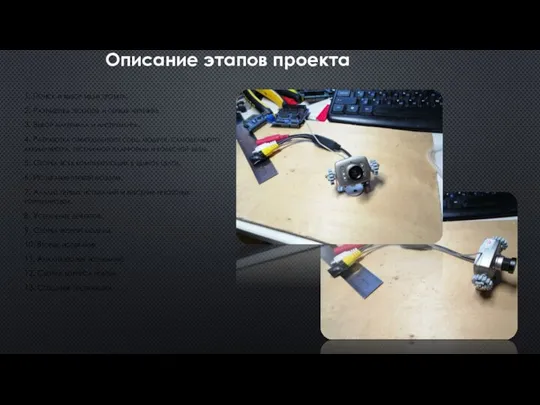
Описание этапов проекта
1. Поиск и выбор идеи проекта.
2. Разработка эскизов и
Описание этапов проекта
1. Поиск и выбор идеи проекта.
2. Разработка эскизов и
Используемое оборудование, материалы
Оборудование:
Паяльная станция (Зубр профессионал) и соответствующие расходники(припой и ортофосфорная
Используемое оборудование, материалы
Оборудование:
Паяльная станция (Зубр профессионал) и соответствующие расходники(припой и ортофосфорная
Навыки и источники полезной информации
Математическая грамотность.
Технические знания.
Икт-грамотность.
Естественно-научные знания.
Творческое мышление.
Умение делать выводы.
Рационально
Навыки и источники полезной информации
Математическая грамотность.
Технические знания.
Икт-грамотность.
Естественно-научные знания.
Творческое мышление.
Умение делать выводы.
Рационально
 Статистическое кодирование сообщений
Статистическое кодирование сообщений Презентация урока по теме:Алгоритмы 9 класс
Презентация урока по теме:Алгоритмы 9 класс Система электронного документооборота TESSA
Система электронного документооборота TESSA Разработка и создание базы данных для организации сервисных услуг в гостиницах различного уровня
Разработка и создание базы данных для организации сервисных услуг в гостиницах различного уровня Основы объективно-ориентированного программирования в среде Lazarus. Повторение
Основы объективно-ориентированного программирования в среде Lazarus. Повторение ntroduction to Software-defined Networking (SDN)
ntroduction to Software-defined Networking (SDN) Разработка компьютерной видеоигры
Разработка компьютерной видеоигры Метод сортировки вставками
Метод сортировки вставками Сортировка и фильтрация данных
Сортировка и фильтрация данных Модели представления знаний. Семантическая модель
Модели представления знаний. Семантическая модель Информационные технологии
Информационные технологии Работа в основных социальных сетях
Работа в основных социальных сетях Инструкция по Зарплатному проекту в ИБ ПСБ Бизнес
Инструкция по Зарплатному проекту в ИБ ПСБ Бизнес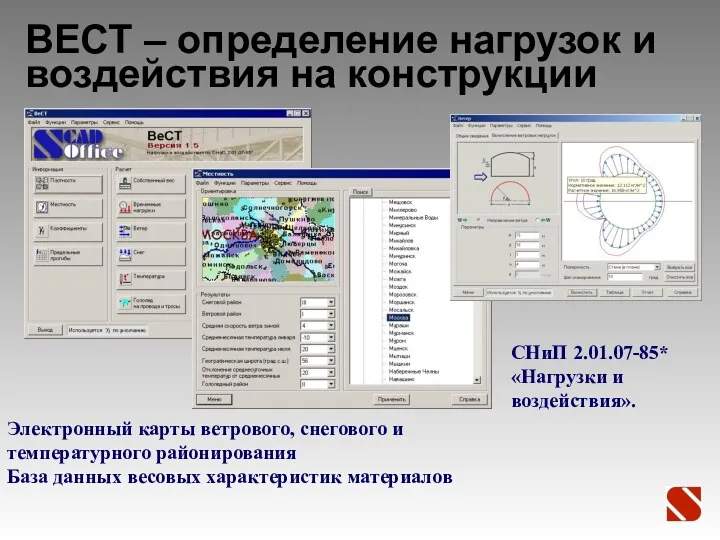 ВЕСТ – определение нагрузок и воздействия на конструкции
ВЕСТ – определение нагрузок и воздействия на конструкции Основы российской государственности на тему Кибербезопасность
Основы российской государственности на тему Кибербезопасность Поиск информации
Поиск информации Разработка конфигурации Склад стройматериалов
Разработка конфигурации Склад стройматериалов Разработчик программного обеспечения iXart . Массовая, многопользовательская, ролевая online-игра Моя жизнь
Разработчик программного обеспечения iXart . Массовая, многопользовательская, ролевая online-игра Моя жизнь Линии связи сетей ЭВМ. Занятие 13
Линии связи сетей ЭВМ. Занятие 13 Интерфейсы. Лекция №8
Интерфейсы. Лекция №8 Базовые сетевые характеристики: производительность, надежность и характеристики сети поставщика услуг
Базовые сетевые характеристики: производительность, надежность и характеристики сети поставщика услуг Немного фактов о scratch и немного о языках программирования
Немного фактов о scratch и немного о языках программирования Cascading style sheets
Cascading style sheets Windows Movie Maker
Windows Movie Maker Чем мы можем дорабатывать Revit? DisignScript, Python C#. Что такое Dynamo?
Чем мы можем дорабатывать Revit? DisignScript, Python C#. Что такое Dynamo? Робота з клавіатурою
Робота з клавіатурою Базовое расписание проекта работ
Базовое расписание проекта работ Социальная информатика: предмет и задачи курса
Социальная информатика: предмет и задачи курса