- Робототехника

Содержание
- 2. Робототехника § 1. Введение
- 3. Роботы вокруг нас «Робот» (чеш. robota — «подневольный труд») Карел Чапек (1890-1938) Промышленные роботы – станки
- 4. Роботы вокруг нас Домашние роботы Роботы-андроиды: пылесос сенокосилка кормушка для кота Asimo (Honda) www.bostondynamics.com
- 5. Роботы вокруг нас беспилотные ЛА боевой робот патрульный робот беспилотные автомобили робот-пожарный робот-хирург
- 6. Роботы вокруг нас Автономный робот может: перемещаться и работать длительное время без вмешательства человека собирать информацию
- 7. Три основных закона робототехники Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку
- 8. Из чего состоит робот? система управления исполнительные механизмы (моторы) датчики датчики датчики
- 9. Система управления роботом контроллер LEGO EV3 контроллер Arduino микроконтроллер микропроцессор оперативная память (ОЗУ) постоянная память (ПЗУ)
- 10. Датчики
- 11. Датчики Датчик — это устройство, которое измеряет какую-то физическую величину и выдаёт информацию о ней в
- 12. Исполнительные устройства двигатель моторы LEGO двигатели и приводы для использования с Arduino
- 13. Робототехника § 2. Управление роботами
- 14. Контакты ввода и вывода
- 15. Порты ввода и вывода Порты — это многоконтактные разъёмы.
- 16. Управление лампочками записать(n, d) номер пина данные 0 – нет сигнала 255 – максимальный сигнал Лампочка
- 17. Управление в цикле нц записать(11, 255) ждать(1000) | время в мс записать(11, 0) кц ждать(1000)
- 18. Система команд роботов Команды управления: задать мощность каждого мотора выбрать направление вращения включить мотор выключить мотор
- 19. Управление без обратной связи мотор[n]:= d номер мотора мощность в % 0 – стоп 100 –
- 20. Управление без обратной связи мотор[0]:= 100 мотор[1]:= -100 ждать(1000) мотор[0]:= 0 мотор[1]:= 0 мотор[0]:= 100 мотор[1]:=
- 21. Робототехника § 3. Алгоритмы управления роботами
- 22. Управляющие кнопки пин 11 пин 2
- 23. Управляющие кнопки цел x нц x:= прочитать(2) если x = 255 то записать(11, 255) иначе записать(11,
- 24. Датчик касания (кнопка) мотор[0]:=100 мотор[1]:=100 нц пока датчик[0] 255 ждать(1) кц мотор[0]:=0 мотор[1]:=0 чтобы не «зависла»
- 25. Сонар (датчик расстояния) 0 – расстояние 0 255 – 10 м или более Одна единица: 10
- 26. Сонар (датчик расстояния) cм cм
- 27. Погрешность датчика Возможная ошибка – 1 единица: ошибка ≈ 3 см ошибка ≈ 5 см Относительная
- 28. Программа, использующая сонар мотор[0]:= 100 мотор[1]:= 100 нц пока датчик[0] > 8 ждать(1) кц мотор[0]:= 0
- 29. Движение по линии 0 – чёрный 255 – белый Реальность:
- 30. Релейное управление Реле — это устройство, которое по сигналу на входе переключается между двумя состояниями («включено»-«выключено»).
- 31. Пропорциональное управление Идея: чем меньше отклонение, тем меньше управляющий сигнал. вещ u, k=0.5 нц u:=k*(120-датчик[0]) мотор[0]:=50-u
- 32. Конец фильма ПОЛЯКОВ Константин Юрьевич д.т.н., учитель информатики ГБОУ СОШ № 163, г. Санкт-Петербург kpolyakov@mail.ru ЕРЕМИН
- 34. Скачать презентацию
Робототехника
§ 1. Введение
Робототехника
§ 1. Введение

Роботы вокруг нас
«Робот» (чеш. robota — «подневольный труд»)
Карел Чапек
(1890-1938)
Промышленные роботы –
Роботы вокруг нас
«Робот» (чеш. robota — «подневольный труд»)
Карел Чапек
(1890-1938)
Промышленные роботы –

Роботы вокруг нас
Домашние роботы
Роботы-андроиды:
пылесос
сенокосилка
кормушка для кота
Asimo (Honda)
www.bostondynamics.com
Роботы вокруг нас
Домашние роботы
Роботы-андроиды:
пылесос
сенокосилка
кормушка для кота
Asimo (Honda)
www.bostondynamics.com

Роботы вокруг нас
беспилотные ЛА
боевой робот
патрульный робот
беспилотные
автомобили
робот-пожарный
робот-хирург
Роботы вокруг нас
беспилотные ЛА
боевой робот
патрульный робот
беспилотные
автомобили
робот-пожарный
робот-хирург
Роботы вокруг нас
Автономный робот может:
перемещаться и работать длительное время без вмешательства
Роботы вокруг нас
Автономный робот может:
перемещаться и работать длительное время без вмешательства
Три основных закона робототехники
Робот не может причинить вред человеку или своим бездействием
Три основных закона робототехники
Робот не может причинить вред человеку или своим бездействием

Из чего состоит робот?
система управления
исполнительные механизмы (моторы)
датчики
датчики
датчики
Из чего состоит робот?
система управления
исполнительные механизмы (моторы)
датчики
датчики
датчики

Система управления роботом
контроллер
LEGO EV3
контроллер
Arduino
микроконтроллер
микропроцессор
оперативная память (ОЗУ)
постоянная память (ПЗУ)
каналы ввода-вывода
Система управления роботом
контроллер
LEGO EV3
контроллер
Arduino
микроконтроллер
микропроцессор
оперативная память (ОЗУ)
постоянная память (ПЗУ)
каналы ввода-вывода

Датчики
Датчики
Датчики
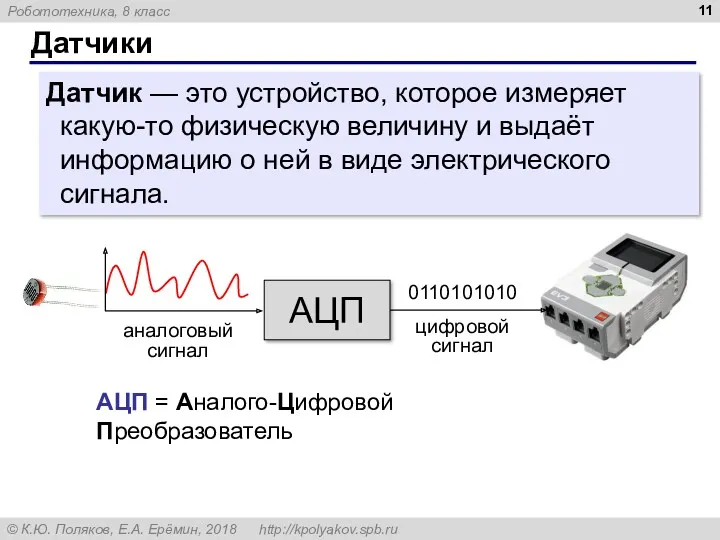
Датчик — это устройство, которое измеряет какую-то физическую величину и выдаёт
Датчики
Датчик — это устройство, которое измеряет какую-то физическую величину и выдаёт

Исполнительные устройства
двигатель
моторы LEGO
двигатели и приводы для использования с Arduino
Исполнительные устройства
двигатель
моторы LEGO
двигатели и приводы для использования с Arduino
Робототехника
§ 2. Управление роботами
Робототехника
§ 2. Управление роботами
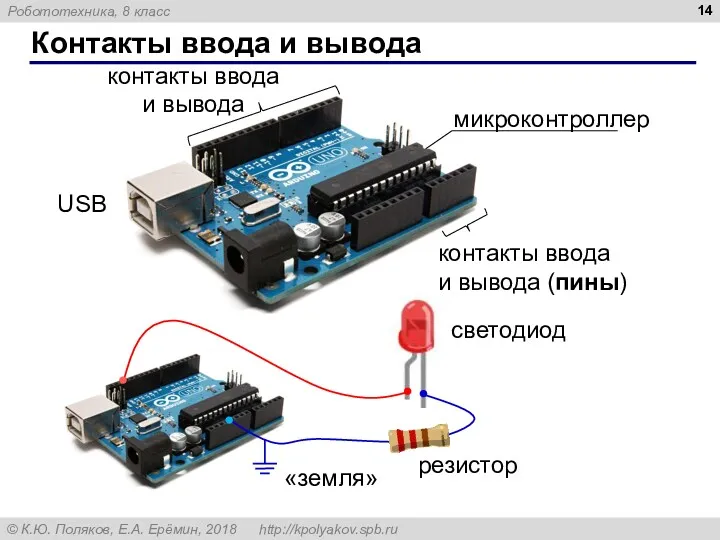
Контакты ввода и вывода
Контакты ввода и вывода
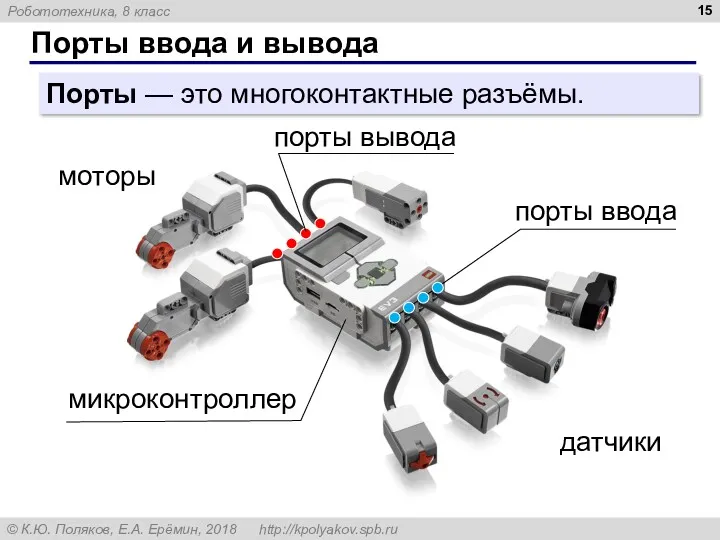
Порты ввода и вывода
Порты — это многоконтактные разъёмы.
Порты ввода и вывода
Порты — это многоконтактные разъёмы.
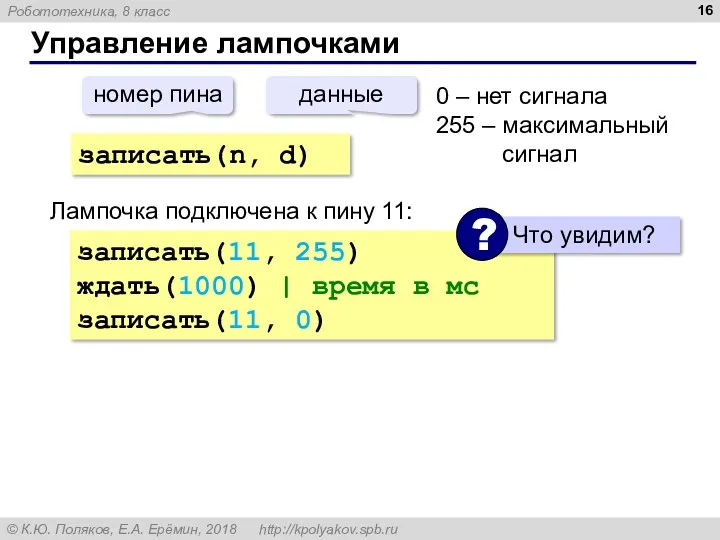
Управление лампочками
записать(n, d)
номер пина
данные
0 – нет сигнала
255 – максимальный сигнал
Лампочка подключена
Управление лампочками
записать(n, d)
номер пина
данные
0 – нет сигнала
255 – максимальный сигнал
Лампочка подключена
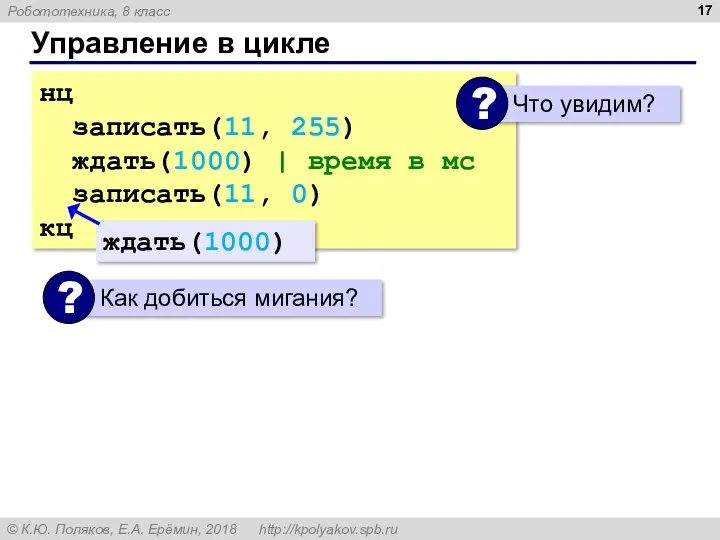
Управление в цикле
нц
записать(11, 255)
ждать(1000) | время в мс
записать(11,
Управление в цикле
нц
записать(11, 255)
ждать(1000) | время в мс
записать(11,
Система команд роботов
Команды управления:
задать мощность каждого мотора
выбрать направление вращения
включить мотор
выключить мотор
провернуть
Система команд роботов
Команды управления:
задать мощность каждого мотора
выбрать направление вращения
включить мотор
выключить мотор
провернуть
![Управление без обратной связи мотор[n]:= d номер мотора мощность в](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/186443/slide-18.jpg)
Управление без обратной связи
мотор[n]:= d
номер мотора
мощность в %
0 – стоп
100 –
Управление без обратной связи
мотор[n]:= d
номер мотора
мощность в %
0 – стоп
100 –
![Управление без обратной связи мотор[0]:= 100 мотор[1]:= -100 ждать(1000) мотор[0]:=](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/186443/slide-19.jpg)
Управление без обратной связи
мотор[0]:= 100
мотор[1]:= -100
ждать(1000)
мотор[0]:= 0
мотор[1]:= 0
мотор[0]:= 100
мотор[1]:= 0
ждать(1000)
мотор[0]:= 0
мотор[1]:=
Управление без обратной связи
мотор[0]:= 100
мотор[1]:= -100
ждать(1000)
мотор[0]:= 0
мотор[1]:= 0
мотор[0]:= 100
мотор[1]:= 0
ждать(1000)
мотор[0]:= 0
мотор[1]:=
Робототехника
§ 3. Алгоритмы управления роботами
Робототехника
§ 3. Алгоритмы управления роботами

Управляющие кнопки
пин 11
пин 2
Управляющие кнопки
пин 11
пин 2

Управляющие кнопки
цел x
нц
x:= прочитать(2)
если x = 255 то
Управляющие кнопки
цел x
нц
x:= прочитать(2)
если x = 255 то
![Датчик касания (кнопка) мотор[0]:=100 мотор[1]:=100 нц пока датчик[0] 255 ждать(1)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/186443/slide-23.jpg)
Датчик касания (кнопка)
мотор[0]:=100
мотор[1]:=100
нц пока датчик[0]<>255
ждать(1)
кц
мотор[0]:=0
мотор[1]:=0
чтобы не «зависла»
пока не коснулся
0 –
Датчик касания (кнопка)
мотор[0]:=100
мотор[1]:=100
нц пока датчик[0]<>255
ждать(1)
кц
мотор[0]:=0
мотор[1]:=0
чтобы не «зависла»
пока не коснулся
0 –
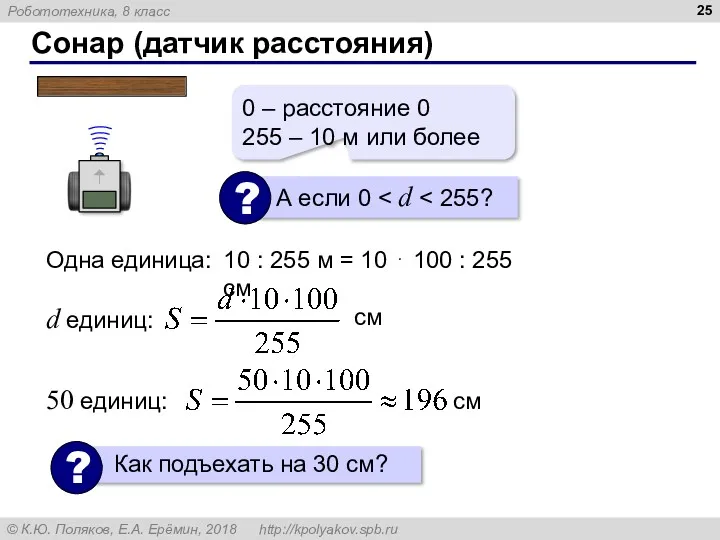
Сонар (датчик расстояния)
0 – расстояние 0
255 – 10 м или более
Одна
Сонар (датчик расстояния)
0 – расстояние 0
255 – 10 м или более
Одна
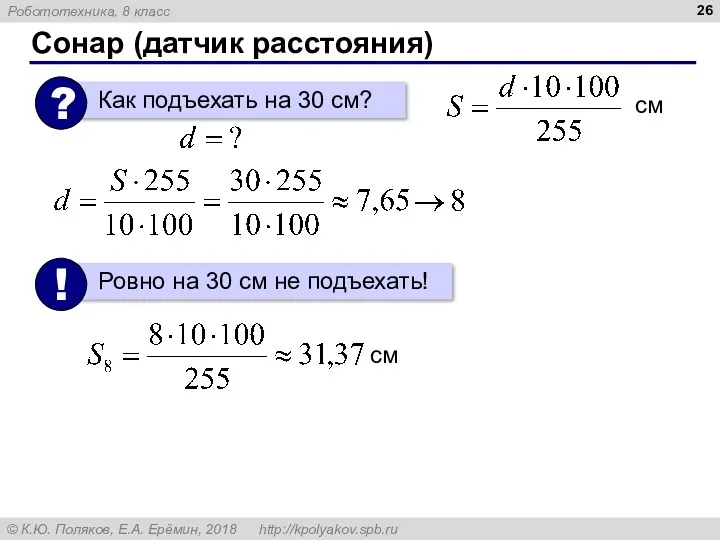
Сонар (датчик расстояния)
cм
cм
Сонар (датчик расстояния)
cм
cм
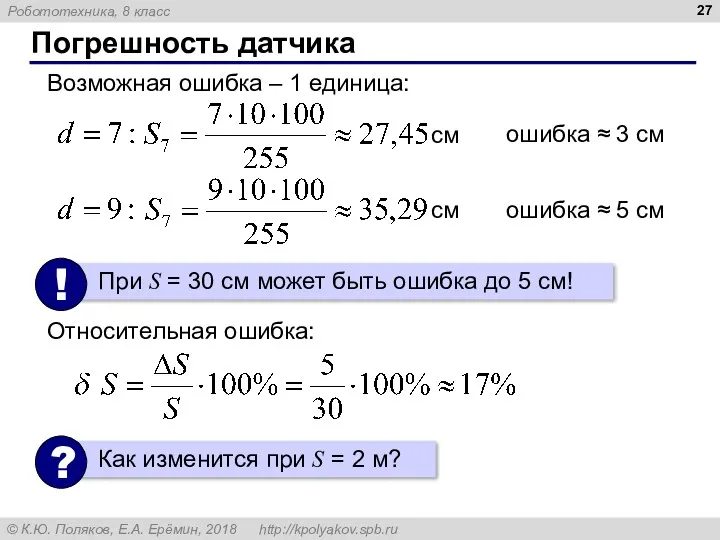
Погрешность датчика
Возможная ошибка – 1 единица:
ошибка ≈ 3 см
ошибка ≈ 5
Погрешность датчика
Возможная ошибка – 1 единица:
ошибка ≈ 3 см
ошибка ≈ 5
![Программа, использующая сонар мотор[0]:= 100 мотор[1]:= 100 нц пока датчик[0]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/186443/slide-27.jpg)
Программа, использующая сонар
мотор[0]:= 100
мотор[1]:= 100
нц пока датчик[0] > 8
ждать(1)
кц
мотор[0]:= 0
мотор[1]:=
Программа, использующая сонар
мотор[0]:= 100
мотор[1]:= 100
нц пока датчик[0] > 8
ждать(1)
кц
мотор[0]:= 0
мотор[1]:=

Движение по линии
0 – чёрный
255 – белый
Реальность:
Движение по линии
0 – чёрный
255 – белый
Реальность:
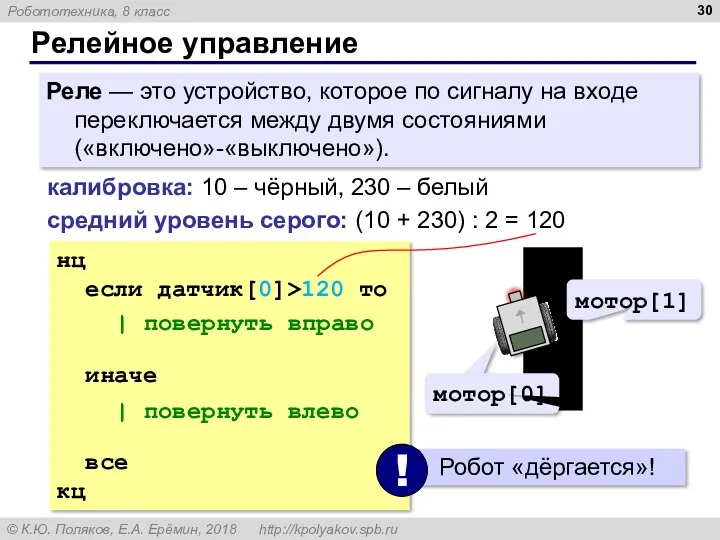
Релейное управление
Реле — это устройство, которое по сигналу на входе переключается
Релейное управление
Реле — это устройство, которое по сигналу на входе переключается
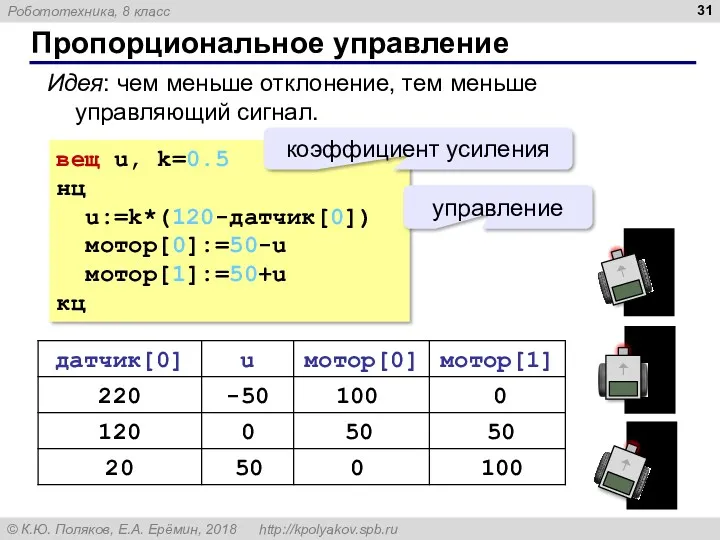
Пропорциональное управление
Идея: чем меньше отклонение, тем меньше управляющий сигнал.
вещ u, k=0.5
нц
Пропорциональное управление
Идея: чем меньше отклонение, тем меньше управляющий сигнал.
вещ u, k=0.5
нц
Конец фильма
ПОЛЯКОВ Константин Юрьевич
д.т.н., учитель информатики
ГБОУ СОШ № 163, г. Санкт-Петербург
kpolyakov@mail.ru
Конец фильма
ПОЛЯКОВ Константин Юрьевич
д.т.н., учитель информатики
ГБОУ СОШ № 163, г. Санкт-Петербург
kpolyakov@mail.ru
 Обзор Web-технологий : Drupal, MODX, WordPress
Обзор Web-технологий : Drupal, MODX, WordPress Інформатика сьогодні. Урок №6
Інформатика сьогодні. Урок №6 Базовые понятия в ТРИЗ
Базовые понятия в ТРИЗ Представление опыта работы директора МАОУ Енгорбойская СОШ Очировой Аюны Владимировны
Представление опыта работы директора МАОУ Енгорбойская СОШ Очировой Аюны Владимировны Цифровизация в логопедической практике
Цифровизация в логопедической практике Величини (змінні і константи), їхні властивості
Величини (змінні і константи), їхні властивості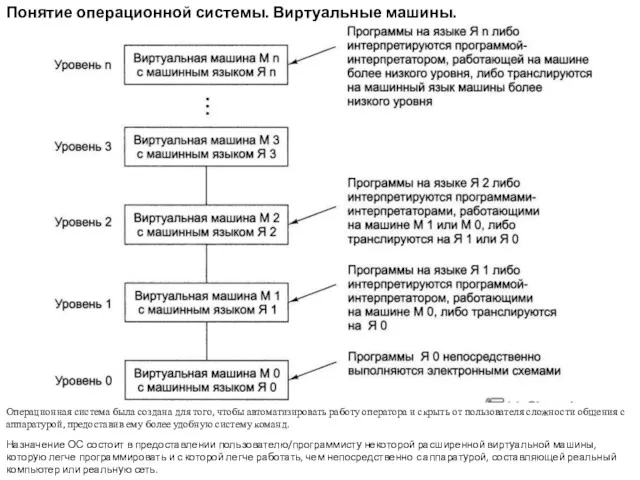 Понятие операционной системы. Виртуальные машины
Понятие операционной системы. Виртуальные машины Стратегия продвижения группы Предел возможностей ВКонтакте
Стратегия продвижения группы Предел возможностей ВКонтакте Человеко-машинное взаимодействие
Человеко-машинное взаимодействие Презентация Система и окружающая среда, 7 класс
Презентация Система и окружающая среда, 7 класс Основы работы с электронными таблицами. Тема 3
Основы работы с электронными таблицами. Тема 3 Проектирование локальной сети компании Мастер-К с OSPF маршрутизацией
Проектирование локальной сети компании Мастер-К с OSPF маршрутизацией Знакомство с ТРИК Студией
Знакомство с ТРИК Студией Элементы теории алгоритмов
Элементы теории алгоритмов Действия с информацией. Хранение информации
Действия с информацией. Хранение информации Программы-архиваторы. Архивирование файлов
Программы-архиваторы. Архивирование файлов История развития языков программирования
История развития языков программирования Задача физической передачи данных. Основные методы доступа
Задача физической передачи данных. Основные методы доступа Звуковые карты и мультимедиа
Звуковые карты и мультимедиа Клавиатура. Группы клавиш
Клавиатура. Группы клавиш SmartPlant 3D Common Task
SmartPlant 3D Common Task Cloud Computing For Everyone. Module 2. Collaborating on Household Budgets
Cloud Computing For Everyone. Module 2. Collaborating on Household Budgets Программирование на Python. Урок 9. Новая игра и ООП
Программирование на Python. Урок 9. Новая игра и ООП Графические способы представления информации. Ментальные карты
Графические способы представления информации. Ментальные карты Свойства алгоритма и его исполнители
Свойства алгоритма и его исполнители Всемирная паутина
Всемирная паутина Настройки окружения, ламп и камер в Blender
Настройки окружения, ламп и камер в Blender Хакеризм. Понятие хакера
Хакеризм. Понятие хакера