- Шагающие роботы

Содержание
- 2. На сегодняшний день изобретено много типов транспортных средств в зависимости от среды перемещения: Воздушный транспорт (пример)
- 3. Только 1 из видов транспорта остаётся за гранью реальности. По сути телепортация – это мгновенное перемещение
- 4. Но вернёмся к способу перемещения, которым пользуется каждое живое существо (за редким исключением). Конечно же, это
- 5. Живые организмы имеют разное количество конечностей. Есть многоножки, имеющие 750 ног. У паука 4 пары лапок.
- 6. Дело в том, что чем меньше ног, тем сложнее удержать равновесие. Наш мозг – это очень
- 7. Существует много видов спорта, в которых применяются навыки по удержанию равновесия. Необходимость удерживать равновесие возникает по
- 8. Что касается четырёхногих животных, то им легче сохранять равновесие при ходьбе по крайней мере в 2
- 9. И всё равно такому роботу, как тот, что вы видите перед собой, необходимы гироскопические датчики и
- 10. По такому принципу стол на одной ножке может стоять ровно и не падать, даже если на
- 11. Классический стол или стул имеет 4 ножки, хотя для устойчивости ему хватит и трёх. Достаточно 3
- 12. Вот мы и перешли к многоногим пешеходам. Пауки могут перемещаться практически не задумываясь над своим равновесием,
- 13. Пауки при ходьбе никогда не поднимают соседние ножки, они их чередуют, то есть поднимают через одну.
- 14. Сегодня наша задача заключается в том, чтобы смоделировать робота, который сможет ходить. Для этого существует множество
- 16. Скачать презентацию

На сегодняшний день изобретено много типов транспортных средств в зависимости от
На сегодняшний день изобретено много типов транспортных средств в зависимости от

Только 1 из видов транспорта остаётся за гранью реальности.
По сути телепортация
Только 1 из видов транспорта остаётся за гранью реальности.
По сути телепортация
Но вернёмся к способу перемещения, которым пользуется каждое живое существо (за
Но вернёмся к способу перемещения, которым пользуется каждое живое существо (за

Живые организмы имеют разное количество конечностей.
Есть многоножки, имеющие 750 ног.
У паука
Живые организмы имеют разное количество конечностей.
Есть многоножки, имеющие 750 ног.
У паука

Дело в том, что чем меньше ног, тем сложнее удержать равновесие.
Наш
Дело в том, что чем меньше ног, тем сложнее удержать равновесие.
Наш
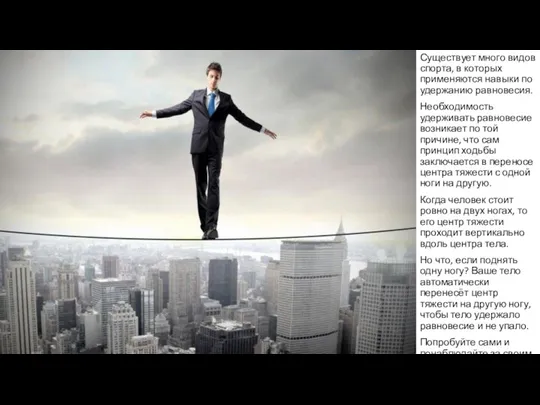
Существует много видов спорта, в которых применяются навыки по удержанию равновесия.
Необходимость
Существует много видов спорта, в которых применяются навыки по удержанию равновесия.
Необходимость

Что касается четырёхногих животных, то им легче сохранять равновесие при ходьбе
Что касается четырёхногих животных, то им легче сохранять равновесие при ходьбе

И всё равно такому роботу, как тот, что вы видите перед
И всё равно такому роботу, как тот, что вы видите перед
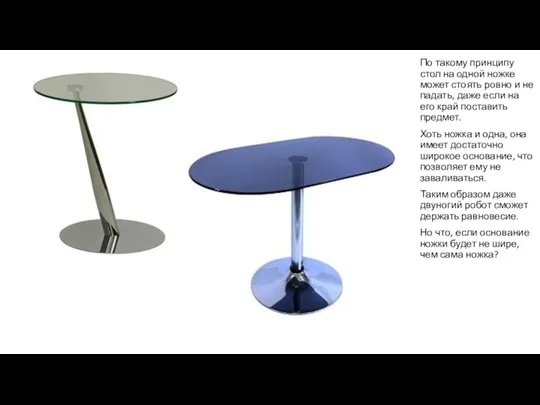
По такому принципу стол на одной ножке может стоять ровно и
По такому принципу стол на одной ножке может стоять ровно и
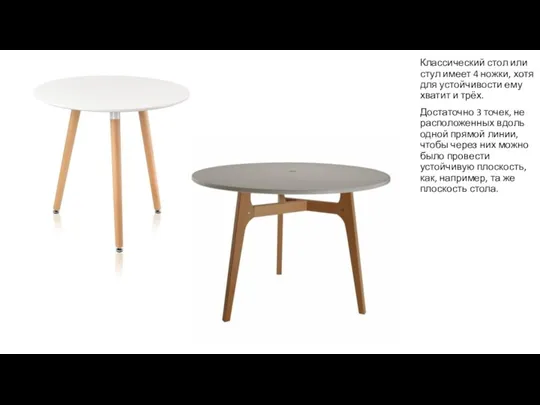
Классический стол или стул имеет 4 ножки, хотя для устойчивости ему
Классический стол или стул имеет 4 ножки, хотя для устойчивости ему
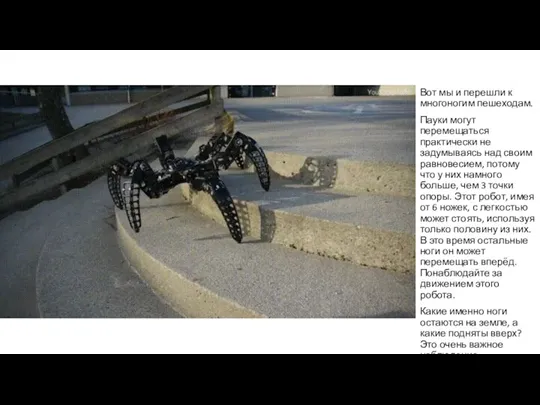
Вот мы и перешли к многоногим пешеходам.
Пауки могут перемещаться практически не
Вот мы и перешли к многоногим пешеходам.
Пауки могут перемещаться практически не
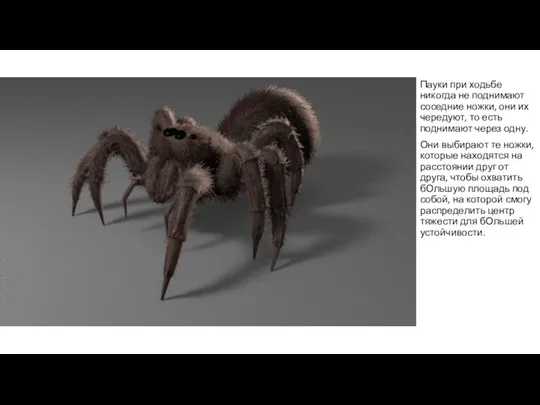
Пауки при ходьбе никогда не поднимают соседние ножки, они их чередуют,
Пауки при ходьбе никогда не поднимают соседние ножки, они их чередуют,
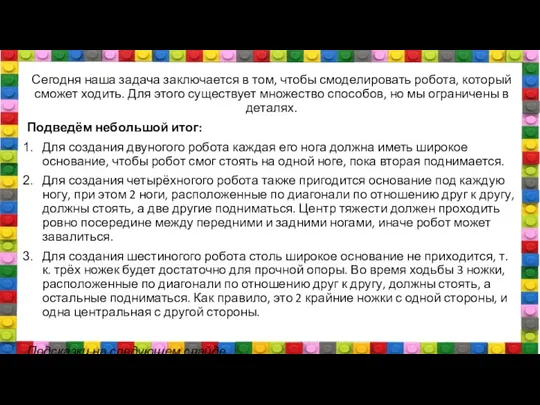
Сегодня наша задача заключается в том, чтобы смоделировать робота, который сможет
Сегодня наша задача заключается в том, чтобы смоделировать робота, который сможет
 Алгоритмы
Алгоритмы Глобальные сети
Глобальные сети Путешествие в страну Информатика. 8 класс
Путешествие в страну Информатика. 8 класс CISCO CCIE Program
CISCO CCIE Program Моделирование корреляционных зависимостей
Моделирование корреляционных зависимостей Интернет-зависимость
Интернет-зависимость Настройка коммутаторов Cisco
Настройка коммутаторов Cisco Конвергентные и цифровые технологии
Конвергентные и цифровые технологии Деловая графика в электронных таблицах.
Деловая графика в электронных таблицах. Инженерия программного обеспечения. Введение (модуль 1)
Инженерия программного обеспечения. Введение (модуль 1) Мобильные операционные системы
Мобильные операционные системы Рекомендации психолога
Рекомендации психолога Многоуровневые ИВС и эталонная модель взаимосвязи открытых систем. Занятие 05, 06
Многоуровневые ИВС и эталонная модель взаимосвязи открытых систем. Занятие 05, 06 Компьютерные объекты
Компьютерные объекты История развития компьютерной техники. 8 класс
История развития компьютерной техники. 8 класс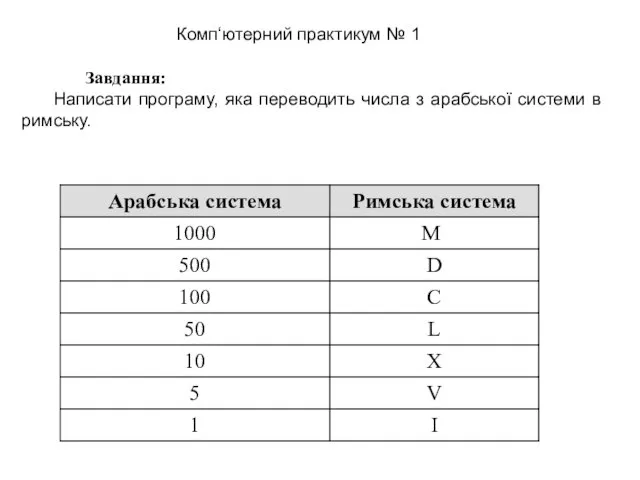 Завдання: Написати програму, яка переводить числа з арабської системи в римську
Завдання: Написати програму, яка переводить числа з арабської системи в римську OSINT(Open Source Intelligency)
OSINT(Open Source Intelligency) Урок по теме Работа со шрифтами. Форматирование текста. 8 класс.
Урок по теме Работа со шрифтами. Форматирование текста. 8 класс. Регистрация в WealTcom
Регистрация в WealTcom Презентация Перевод чисел между системами счисления, основания которых являются степенями числа 2 10 класс
Презентация Перевод чисел между системами счисления, основания которых являются степенями числа 2 10 класс Информационно-логические основы ЭВМ
Информационно-логические основы ЭВМ Тораптық утелиттердің жұмысын оқып үйрену
Тораптық утелиттердің жұмысын оқып үйрену Безопасность при использовании современных гаджетов
Безопасность при использовании современных гаджетов Тестирование мобильных приложений
Тестирование мобильных приложений Текстові і графічні обʼєкти на слайдах. Урок 30
Текстові і графічні обʼєкти на слайдах. Урок 30 Ақпарат. Компьютер. Компьютер құрылғылары,ақпараттық модель
Ақпарат. Компьютер. Компьютер құрылғылары,ақпараттық модель Первый канал
Первый канал Первоначальные сведения о мониторах
Первоначальные сведения о мониторах