- Технологии компьютерного проектирования и оптимизации комплексных систем

Содержание
- 2. Теоретические основы САПР. Типовой процесс проектирования Проектирование – процесс создания технических решений. Создание – итеративный процесс
- 3. Терминология суть аббревиатуры CAD (Computer Aided Design); суть аббревиатуры CAM (Computer Aided Manufaсturing) суть аббревиатуры CAE
- 4. Применительно к этапам проектирования ЭС обычно выделяют следующие группы задач, решаемых последовательно: Задачи системотехнического проектирования; Задачи
- 5. Задачи и методы топологического проектирования Топологическое проектирование является наиболее сложным и ответственным этапом разработки конструкции ЭС.
- 6. Состав и взаимосвязь задач топологического проектирования
- 7. Обычно задания компоновки рассматриваются как процесс принятия решений в определенных или неопределенных условиях, в результате выполнения
- 8. Методы решения задач компоновки Последовательный алгоритм, использующий матрицу смежности Последовательный алгоритм, использующий матрицу цепей Последовательно-итерационный алгоритм
- 9. Критерии оптимизации компоновки минимум суммарной взвешенной длины соединений; минимум типов конструктивно законченных частей; плотность компоновки, минимум
- 10. Формализация задания (способы представления схемы электрической принципиальной) Список цепей (связей) Матрица инцидентности (связности) Графовое представление
- 11. Правило формирования списка цепей (связей) Список цепей формируется в виде текстового файла с обязательным перечислением всех
- 12. Задание компоновки Выбрать схему электрическую принципиальную Провести формализацию и, используя два алгоритма (последовательно-групповой и алгоритм Штейнберга),
- 13. Пример схемы
- 14. Формирование списка связей Dd1 4 d3 3 Dd1 6 Dd3 12 C А Dd3 14 R
- 15. Матрица инцидентности (связности) Правило: Если элемент инцидентен связи, то в соответствующей ячейке матрицы – «1»
- 16. Методы решения задач размещения Последовательно-итерационный алгоритм размещения Эвристический алгоритм, основанный на методе выделения «длинных» и «коротких»
- 17. Последовательные алгоритмы Основаны на предположении, что для получения оптимального размещения необходимо в соседних позициях располагать элементы,
- 18. Последовательно-групповой метод Определение размеров матрицы посадочных мест: минимальная размерность – m*n, где m-количество мест в строке,
- 19. В случае минимизации суммарной взвешенной длины соединений формула для расчета изменения значения целевой функции при перестановке
- 20. Алгоритм Штейнберга (алгоритм парных перестановок) Все элементы считаются условно одногабаритными Из всего множества элементов схемы выбирается
- 21. Алгоритм Штейнберга (алгоритм парных перестановок) Из всего множества элементов Е выбирается подмножество Еk, состоящее из m
- 22. Пример Матрица стоимости
- 23. Методы решения задач трассировки Алгоритмы формирования списка электрических соединений Алгоритмы определения порядка проведения соединений Волновой алгоритм
- 25. Скачать презентацию
 Представление числовой информации с помощью систем счисления
Представление числовой информации с помощью систем счисления Базы данных Всероссийского института научной и технической информации ВИНИТИ РАН
Базы данных Всероссийского института научной и технической информации ВИНИТИ РАН Информатика. логика
Информатика. логика Архитектура и протоколы Internet. Базовый курс
Архитектура и протоколы Internet. Базовый курс Создание таблиц в HTML
Создание таблиц в HTML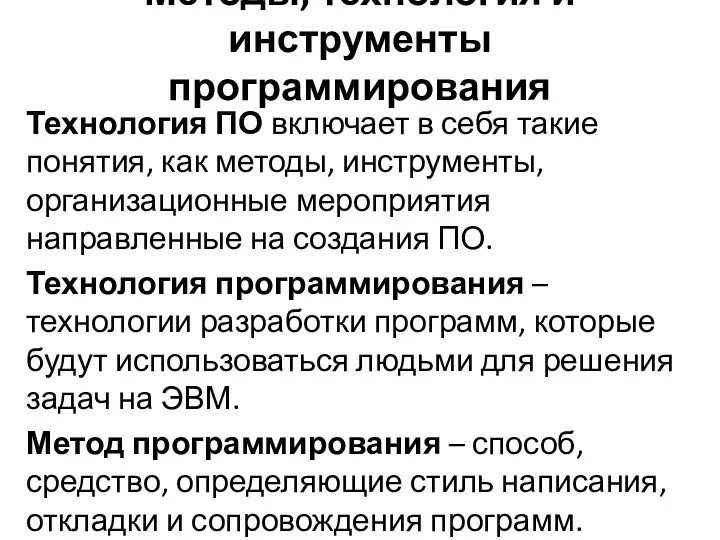 Методы, технология и инструменты программирования
Методы, технология и инструменты программирования Исправление ошибок в простой программе с условными операторами
Исправление ошибок в простой программе с условными операторами Основные процессы жизненного цикла программного средства
Основные процессы жизненного цикла программного средства Программирование ветвлений на Паскале
Программирование ветвлений на Паскале Динамические структуры данных. Указатели
Динамические структуры данных. Указатели Етикет електронного листування. (7 клас)
Етикет електронного листування. (7 клас) Безопасный интернет
Безопасный интернет Дополненная реальность (AR)
Дополненная реальность (AR) Об’єктно-орієнтоване програмування
Об’єктно-орієнтоване програмування Самоорганизующиеся карты. Практика
Самоорганизующиеся карты. Практика Модели жизненного цикла и их развитие. Концепция разработки программных систем
Модели жизненного цикла и их развитие. Концепция разработки программных систем АиФП 6. Ограничение мощи алгориитмов
АиФП 6. Ограничение мощи алгориитмов Создание, развитие, обслуживание и эксплуатация информационных систем
Создание, развитие, обслуживание и эксплуатация информационных систем Разработка урока(ов) + презентация Файл и файловая система
Разработка урока(ов) + презентация Файл и файловая система Введение в PHP. Базовый синтаксис
Введение в PHP. Базовый синтаксис Электронные ресурсы для детей и юношества в общедоступных библиотеках: создание и использование
Электронные ресурсы для детей и юношества в общедоступных библиотеках: создание и использование Выпускная квалификационная работа на тему: Разработка сайта для ООО Агентство недвижимости Гарант
Выпускная квалификационная работа на тему: Разработка сайта для ООО Агентство недвижимости Гарант Компьютерные вирусы и антивирусные программы
Компьютерные вирусы и антивирусные программы Информатика. Понятие информации, общая характеристика процессов сбора, передачи, обработки и накопления информации
Информатика. Понятие информации, общая характеристика процессов сбора, передачи, обработки и накопления информации HTML documents and JavaScript
HTML documents and JavaScript 1С:Предприятие 8. Такси и аренда автомобилей
1С:Предприятие 8. Такси и аренда автомобилей Основные понятия криптографии
Основные понятия криптографии Представления о технических и программных средствах телекоммуникационных технологий
Представления о технических и программных средствах телекоммуникационных технологий