- Тема: Моделирование. Неориентированный и ориентированный графы. Задачи

Содержание
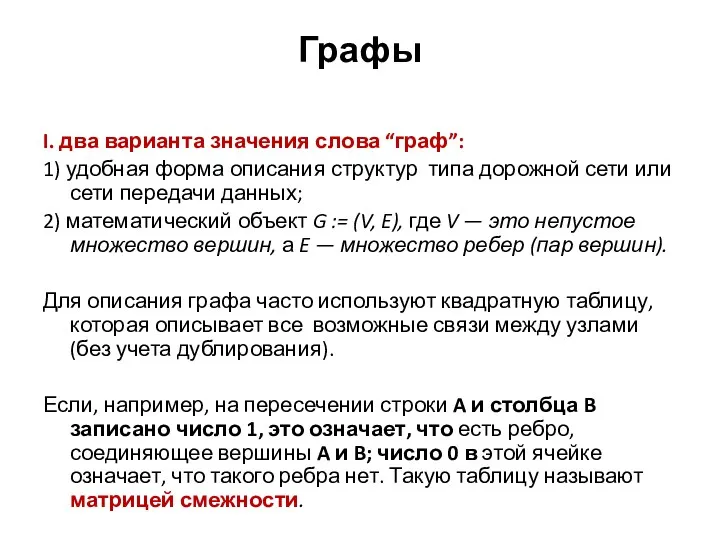
- 2. Графы I. два варианта значения слова “граф”: 1) удобная форма описания структур типа дорожной сети или
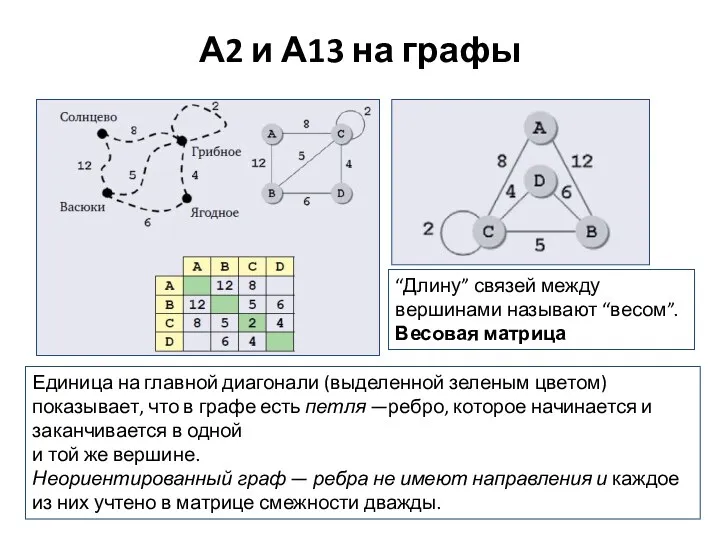
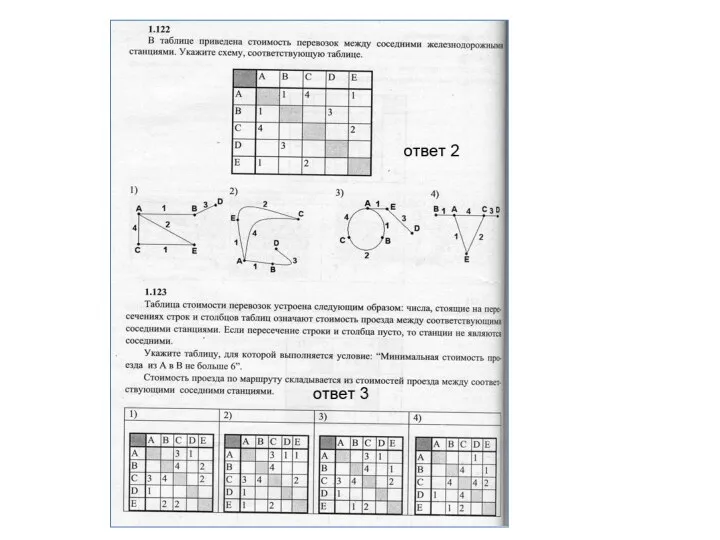
- 3. А2 и А13 на графы Единица на главной диагонали (выделенной зеленым цветом) показывает, что в графе
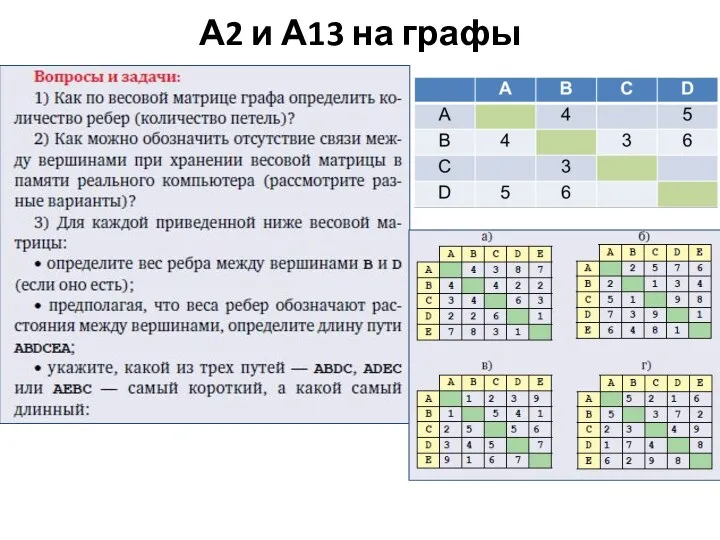
- 4. А2 и А13 на графы
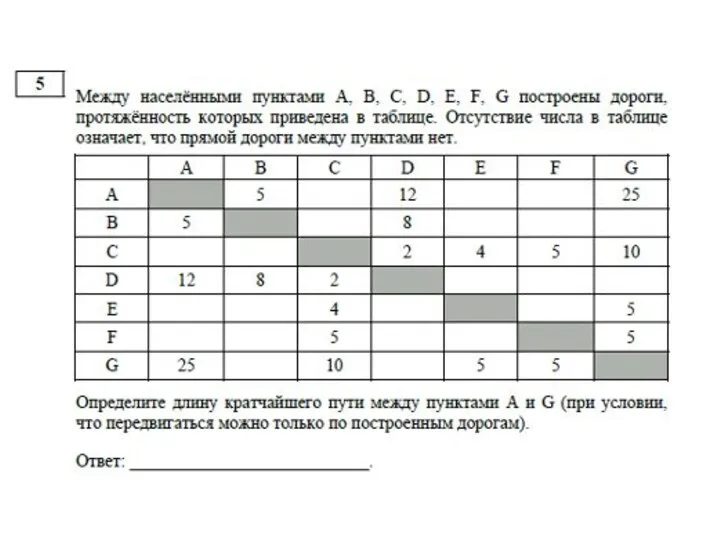
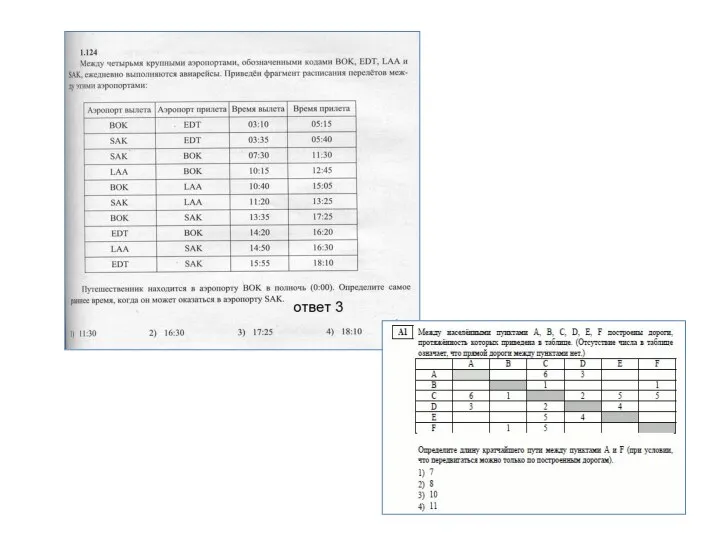
- 5. Задача на «кратчайшее расстояние» ДЕМО 2013
- 6. Способ 1. Построение графа. А2. Задача на «кратчайшее расстояние» способы решения 1. Анализ весовой матрицы и
- 7. Способ 2. Построение дерева возможных путей А2. Задача на «кратчайшее расстояние» способы решения 1. Определение вершины.
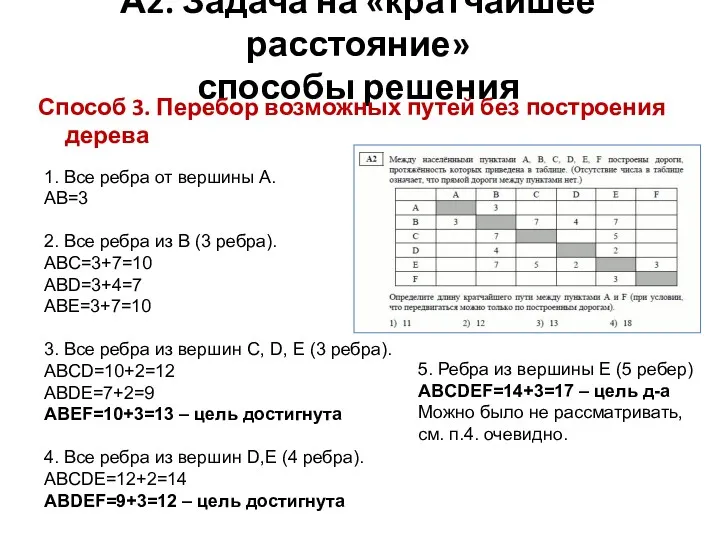
- 8. А2. Задача на «кратчайшее расстояние» способы решения Способ 3. Перебор возможных путей без построения дерева 1.
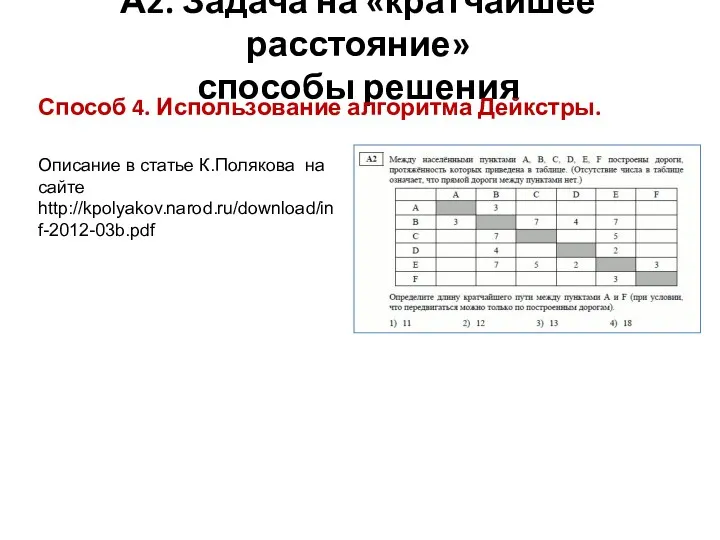
- 9. А2. Задача на «кратчайшее расстояние» способы решения Способ 4. Использование алгоритма Дейкстры. Описание в статье К.Полякова
- 11. Способ 1. Построение графа. Демо 2015, №5. Задача на «кратчайшее расстояние» Анализ весовой матрицы и количества
- 12. Способ 1. Построение графа. Демо 2015, №5. Задача на «кратчайшее расстояние» 1. Анализ весовой матрицы и
- 13. Способ 2. Построение дерева Возможных путей Демо 2015, №5. Задача на «кратчайшее расстояние» 1. Определение вершины
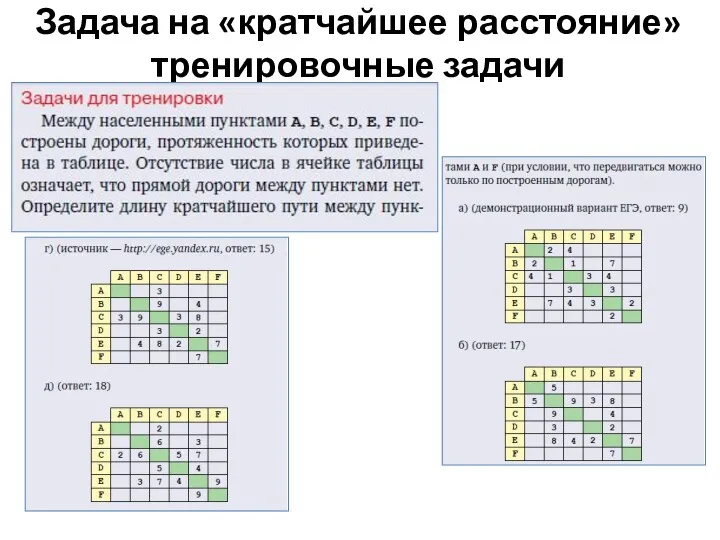
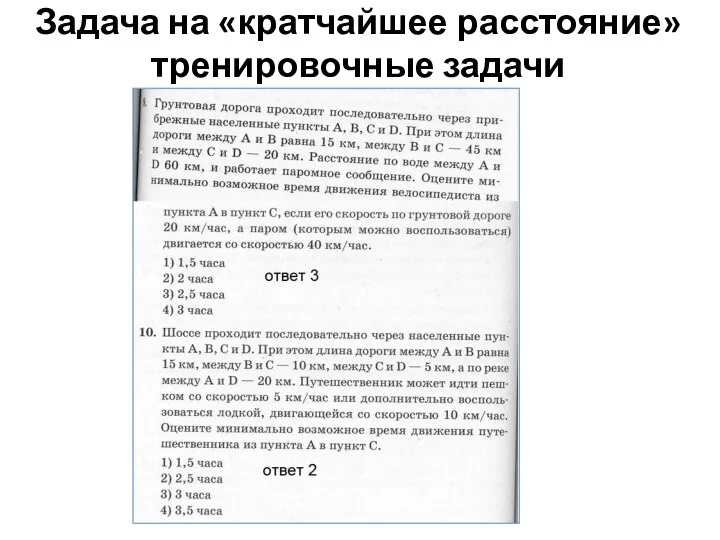
- 14. Задача на «кратчайшее расстояние» тренировочные задачи
- 15. Задача на «кратчайшее расстояние»
- 16. Задача на «кратчайшее расстояние» тренировочные задачи
- 21. Скачать презентацию
Графы
I. два варианта значения слова “граф”:
1) удобная форма описания структур типа
Графы
I. два варианта значения слова “граф”:
1) удобная форма описания структур типа
А2 и А13 на графы
Единица на главной диагонали (выделенной зеленым цветом)
А2 и А13 на графы
Единица на главной диагонали (выделенной зеленым цветом)
А2 и А13 на графы
А2 и А13 на графы
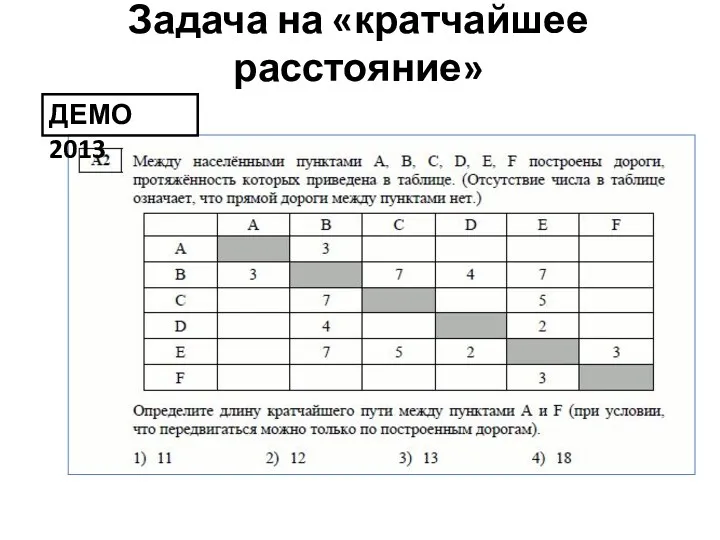
Задача на «кратчайшее расстояние»
ДЕМО 2013
Задача на «кратчайшее расстояние»
ДЕМО 2013
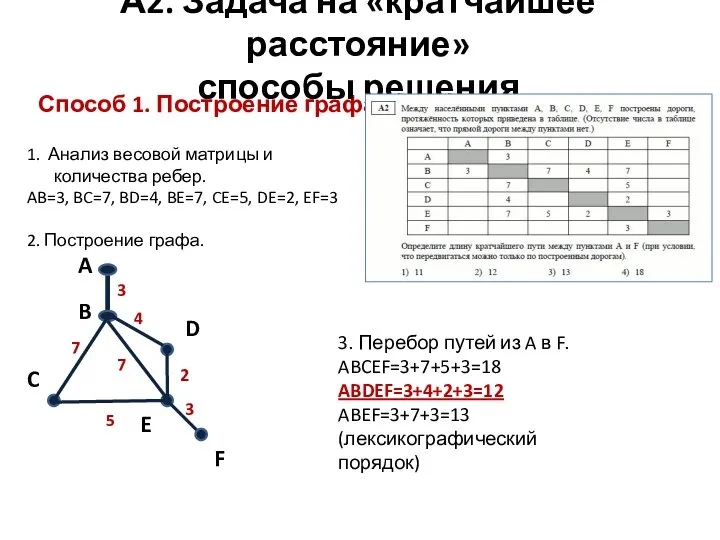
Способ 1. Построение графа.
А2. Задача на «кратчайшее расстояние»
способы решения
1. Анализ весовой
Способ 1. Построение графа.
А2. Задача на «кратчайшее расстояние»
способы решения
1. Анализ весовой
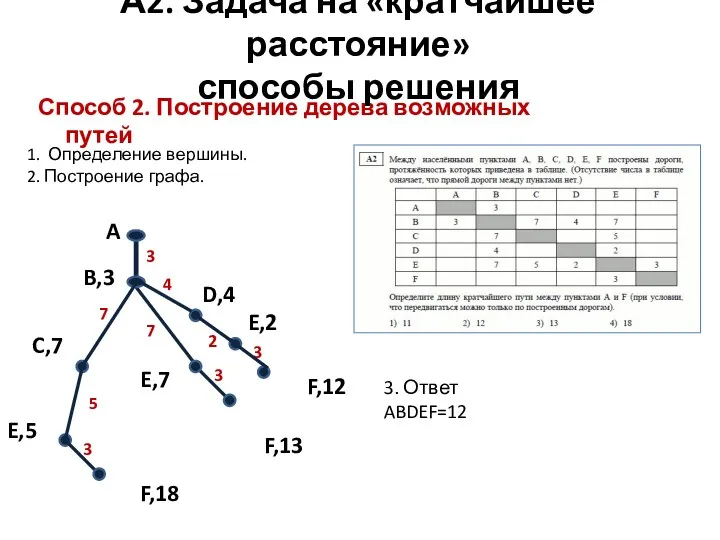
Способ 2. Построение дерева возможных путей
А2. Задача на «кратчайшее расстояние»
способы решения
1.
Способ 2. Построение дерева возможных путей
А2. Задача на «кратчайшее расстояние»
способы решения
1.
А2. Задача на «кратчайшее расстояние»
способы решения
Способ 3. Перебор возможных путей без
А2. Задача на «кратчайшее расстояние»
способы решения
Способ 3. Перебор возможных путей без
А2. Задача на «кратчайшее расстояние»
способы решения
Способ 4. Использование алгоритма Дейкстры.
Описание в
А2. Задача на «кратчайшее расстояние»
способы решения
Способ 4. Использование алгоритма Дейкстры.
Описание в
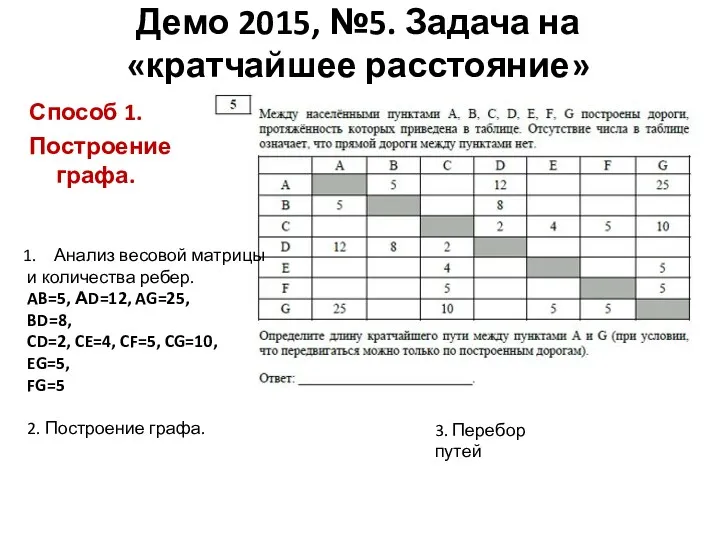
Способ 1.
Построение графа.
Демо 2015, №5. Задача на «кратчайшее расстояние»
Анализ весовой матрицы
и
Способ 1.
Построение графа.
Демо 2015, №5. Задача на «кратчайшее расстояние»
Анализ весовой матрицы
и
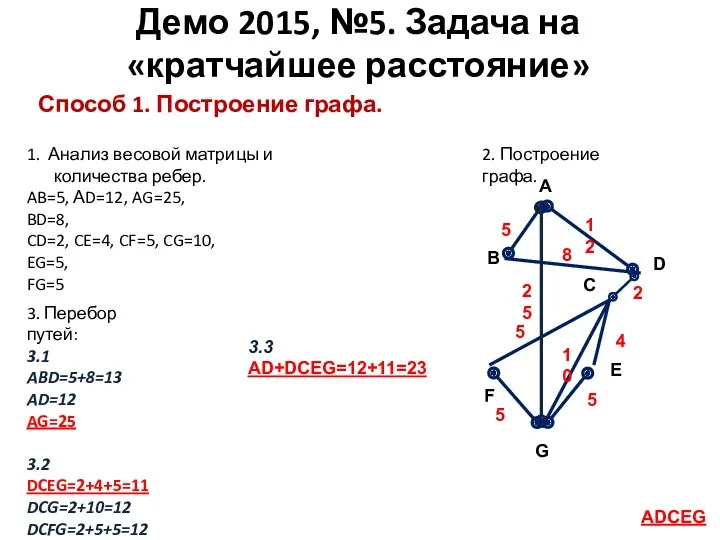
Способ 1. Построение графа.
Демо 2015, №5. Задача на «кратчайшее расстояние»
1. Анализ
Способ 1. Построение графа.
Демо 2015, №5. Задача на «кратчайшее расстояние»
1. Анализ
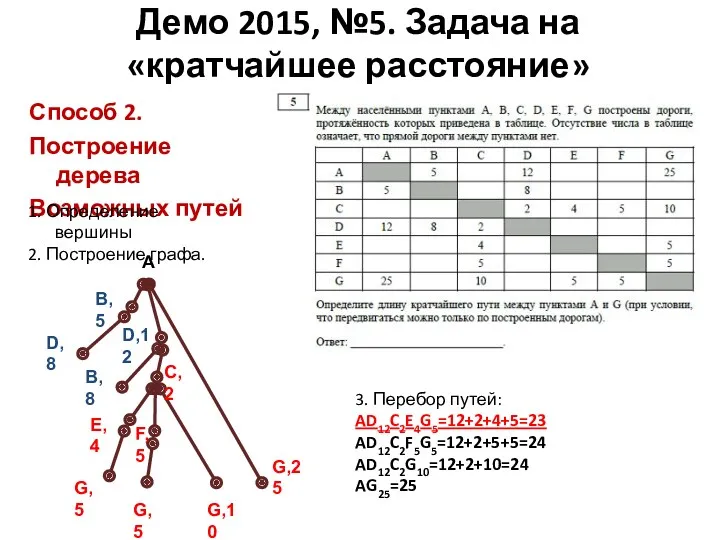
Способ 2.
Построение дерева
Возможных путей
Демо 2015, №5. Задача на «кратчайшее расстояние»
1. Определение
Способ 2.
Построение дерева
Возможных путей
Демо 2015, №5. Задача на «кратчайшее расстояние»
1. Определение
Задача на «кратчайшее расстояние»
тренировочные задачи
Задача на «кратчайшее расстояние»
тренировочные задачи
Задача на «кратчайшее расстояние»
Задача на «кратчайшее расстояние»
Задача на «кратчайшее расстояние»
тренировочные задачи
Задача на «кратчайшее расстояние»
тренировочные задачи
 Опасности в Интернете
Опасности в Интернете Основы алгоритмизации. Подготовка к ГИА. 9 класс
Основы алгоритмизации. Подготовка к ГИА. 9 класс Компьютерные средства активизации работы учащихся на уроках математики
Компьютерные средства активизации работы учащихся на уроках математики Единая система программной документации (ЕСПД)
Единая система программной документации (ЕСПД) Определение скорости передачи информации при заданной пропускной способности канала
Определение скорости передачи информации при заданной пропускной способности канала Powerpoint бағдарламасымен жұмыс жасау
Powerpoint бағдарламасымен жұмыс жасау Разработка инструментального приложения для развертывания корпоративной распределенной информационной системы
Разработка инструментального приложения для развертывания корпоративной распределенной информационной системы Snort. Система обнаружения атак
Snort. Система обнаружения атак Information technology in our daily lives
Information technology in our daily lives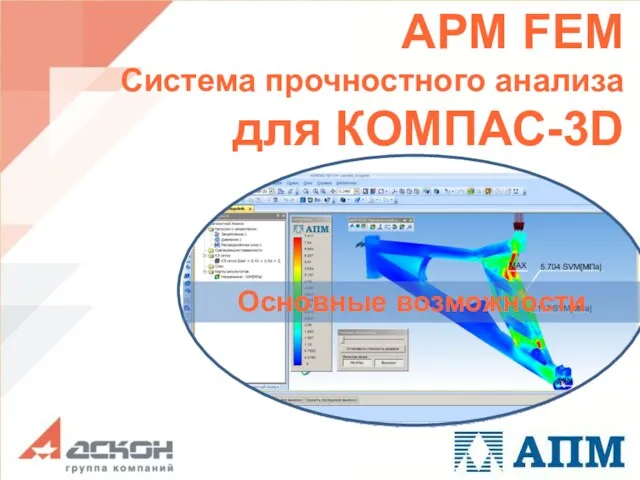 APM FEM Система прочностного анализа для КОМПАС-3D
APM FEM Система прочностного анализа для КОМПАС-3D Autodesk. Область применения Revit
Autodesk. Область применения Revit Особенности объектной модели Java. (Лекция 5)
Особенности объектной модели Java. (Лекция 5) Intrusion Detection. Chapter 8. Computer Security: Principles and Practice
Intrusion Detection. Chapter 8. Computer Security: Principles and Practice Воронка продаж со 100% гарантией
Воронка продаж со 100% гарантией Создание презентации с помощью шаблона оформления
Создание презентации с помощью шаблона оформления Сообщения Windows. Возникновение сообщений. (Лекция 2)
Сообщения Windows. Возникновение сообщений. (Лекция 2) Модель OSI. Сети доступа
Модель OSI. Сети доступа Елементи для введення даних: текстове поле, прапорець, випадаючий список
Елементи для введення даних: текстове поле, прапорець, випадаючий список Системы управления базами данных
Системы управления базами данных HotReload кода C# другим кодом C#
HotReload кода C# другим кодом C# Протоколи управління мережами NGN
Протоколи управління мережами NGN Системы счета. ЕГЭ
Системы счета. ЕГЭ Что такое Unity и Vuforia
Что такое Unity и Vuforia C++ тілінде бағдарламалау
C++ тілінде бағдарламалау ER-диаграммы. Связи
ER-диаграммы. Связи История компьютера
История компьютера Интернет - магазин фирмы Интеграл
Интернет - магазин фирмы Интеграл Проект на тему:О чём может рассказать школьная библиотека
Проект на тему:О чём может рассказать школьная библиотека