- Теория автоматов

Содержание
- 2. Автомат – дискретный преобразователь информации, который на основе входных сигналов, поступающих в дискретные моменты времени, и
- 3. Под автоматом будем понимать некоторую математическую модель. Вопросы практической реализации не рассматриваются. В связи с этим
- 4. Автомат представляет собой кортеж: где X – множество входных сигналов (входной алфавит), Y – множество выходных
- 5. Законы функционирования автоматов. В зависимости от законов функционирования различают 3 вида автоматов: 1. Автоматы первого рода,
- 6. 2. Автоматы второго рода
- 7. Правильные автоматы второго рода, или автоматы Мура: На практике наибольшее распространение получили автоматы Мили и автоматы
- 8. Задание автоматов Автоматы могут быть заданы следующими способами: 1. В виде графа Рис. 1 Автомат Мили
- 9. Рис.2 Автомат Мура
- 10. При построении автомата Мили каждая дуга, соединяющая вершины и , имеет обозначение . Это означает следующее:
- 11. Так как в автомате Мура выходной сигнал зависит только от текущего состояния , то каждая дуга,
- 12. 2 способ. В виде таблиц перехода и выхода (автомат Мили); отмеченной таблицы перехода (автомат Мура). Автомат
- 13. Автомат Мура описывается с помощью отмеченной таблицы перехода: Таблица переходов (ТП)
- 14. ПРИМЕР. Синтезировать автомат, на вход которого подаются монеты номинальной стоимостью 1, 2 и 3 копейки, а
- 15. Определим входной, выходной алфавиты и множество внутренних состояний: входной алфавит - монеты номинальной стоимостью 1, 2
- 17. Граф автомата Мили имеет вид: Рис. 2
- 18. Таблицы перехода и выхода представлены в виде: Таблица переходов (ТП) Таблица выходов (ТВ)
- 19. 3. Автоматная матрица
- 20. Неопределенным состоянием называется несуществующее состояние. Частичным автоматом называется автомат, в котором некоторые состояния в таблице перехода
- 21. Минимизация автоматов Входным словом называется совокупность сигналов, поступающих на вход. Выходным словом называются совокупность сигналов на
- 22. Два состояния одноэквивалентными , если на одинаковое входное слово выдается одинаковый выходной сигнал. Два состояния k-эквивалентными,
- 23. Эквивалентные состояния объединяются в класс эквивалентности. Минимальный автомат – это автомат, состоящий из наименьшего числа состояний,
- 24. Алгоритм минимизации автомата Мили 1. По таблице выхода находятся состояния с одинаковыми выходными сигналами. Данные состояния
- 25. 2. По таблице перехода определяются классы двухэквивалентных состояний: для любого класса выделяется состояние, которое на одинаковый
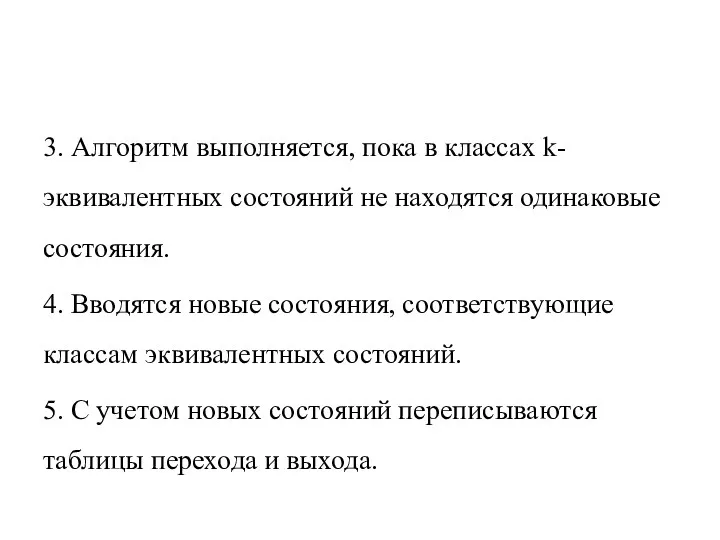
- 26. 3. Алгоритм выполняется, пока в классах k-эквивалентных состояний не находятся одинаковые состояния. 4. Вводятся новые состояния,
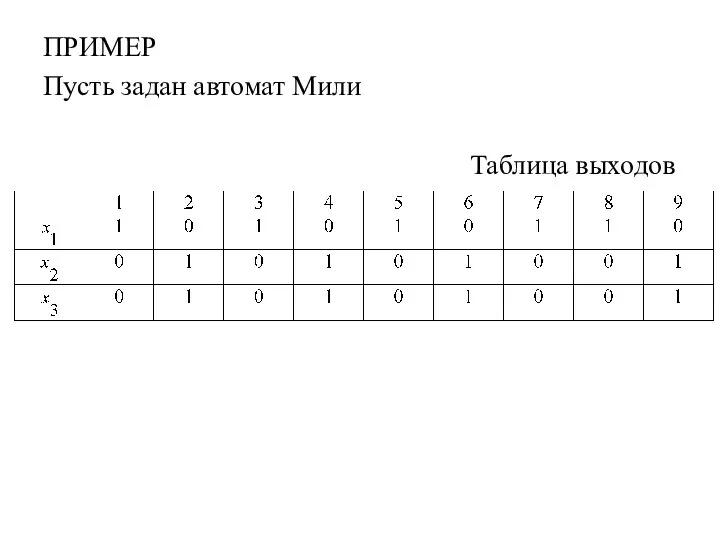
- 27. ПРИМЕР Пусть задан автомат Мили Таблица выходов
- 28. Таблица переходов
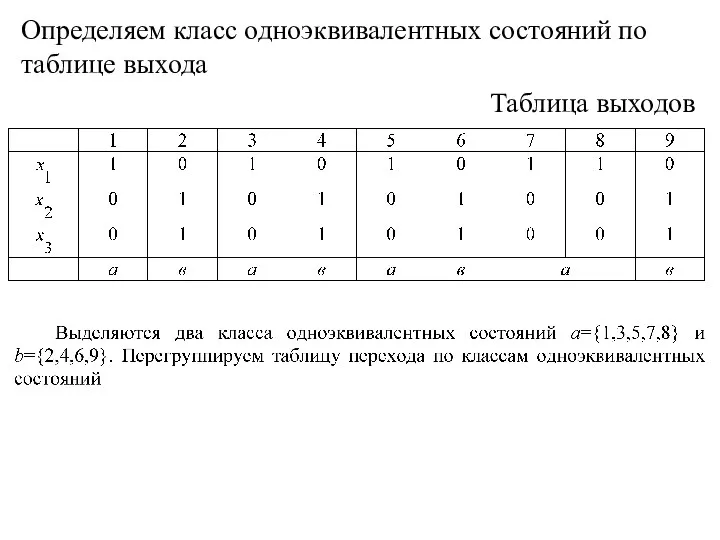
- 29. Определяем класс одноэквивалентных состояний по таблице выхода Таблица выходов
- 30. Таблица переходов
- 31. Перекодируем состояния по полученным классам Таблица переходов
- 32. Выделяем внутри каждого из классов одинаковые состояния, тем самым определяя классы двухэквивалентных состояний Таблица переходов
- 33. Таблица переходов
- 34. Таблица переходов
- 35. Таблица переходов
- 36. Минимизированный автомат Мили в новых состояниях имеет вид Таблица переходов Таблица выходов
- 37. Особенности минимизации автомата Мура. Автомат Мура минимизируется аналогично минимизации автомата Мили за исключением первого шага. Выделение
- 38. Минимизация частичных автоматов. Для того, чтобы провести минимизацию частичных автоматов неопределенное состояние доопределяется самостоятельно. Далее минимизация
- 39. Переход от автомата Мили к автомату Мура Автоматы Мили и автоматы Мура отличаются функцией выхода. Автомат
- 40. То есть произвольному состоянию автомата Мили и входному сигналу соответствует состояние автомата Мура: При этом начальные
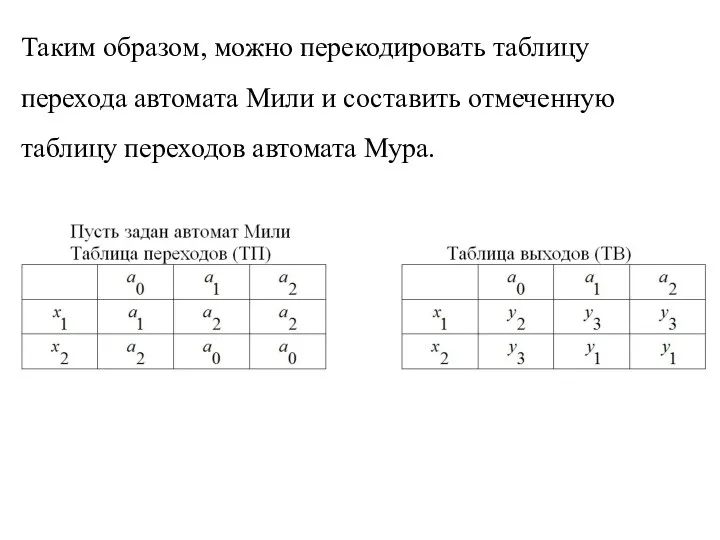
- 41. Таким образом, можно перекодировать таблицу перехода автомата Мили и составить отмеченную таблицу переходов автомата Мура.
- 42. Перекодируем матрицу перехода автомата Мили:
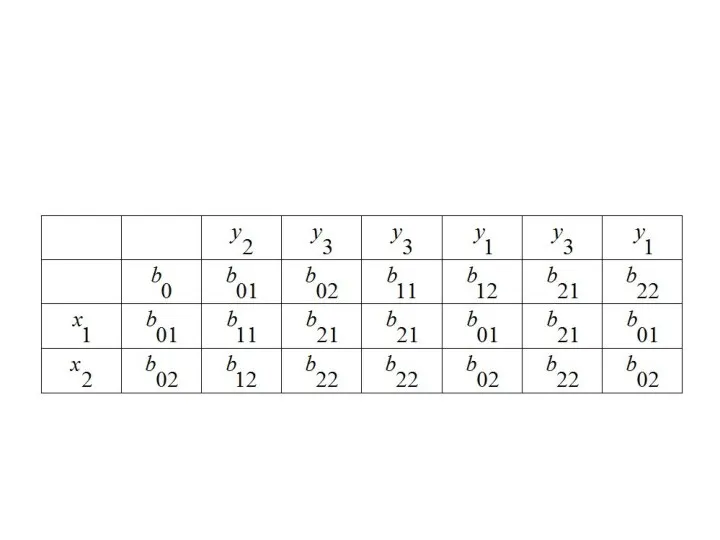
- 43. Составляем таблицу перехода автомата Мура.
- 44. При составлении таблицы перехода автомата Мили рассуждаем следующим образом: состояние автомата Мура соответствует состоянию автомата Мили
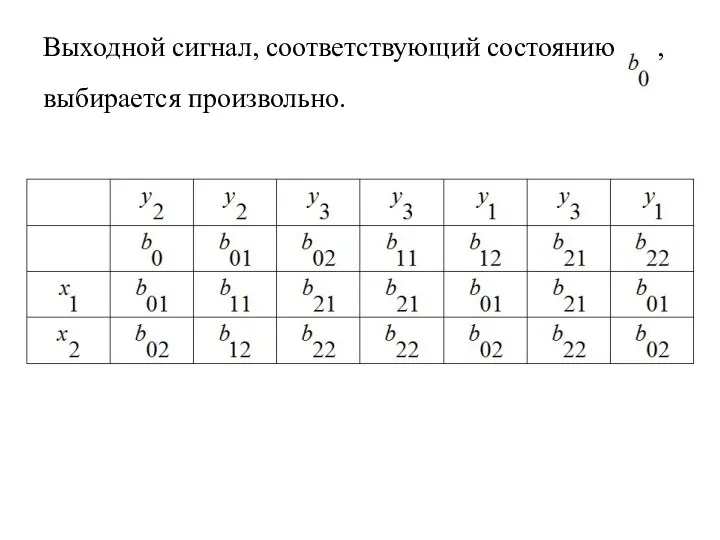
- 45. Так как в автомате Мура произвольному состоянию соответствует некоторый выходной сигнал, то строка выхода отмеченной таблицы
- 47. Выходной сигнал, соответствующий состоянию , выбирается произвольно.
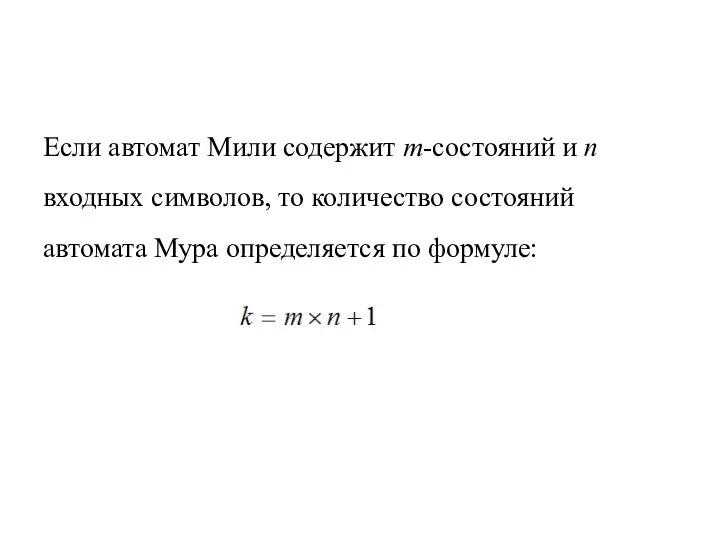
- 48. Если автомат Мили содержит m-состояний и n входных символов, то количество состояний автомата Мура определяется по
- 49. Переход от автомата Мура к автомату Мили Переход от автомата Мура к автомату Мили заключается в
- 50. Тем самым, если говорить в терминах графов, выходные сигналы от состояний переносятся на дуги, которые в
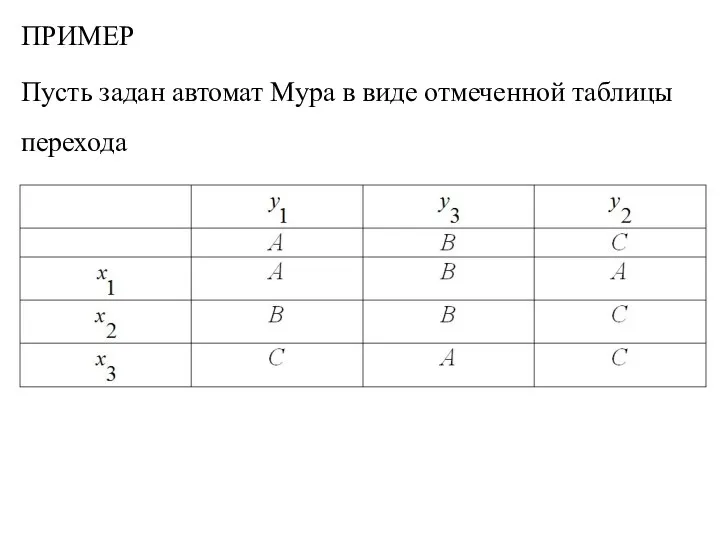
- 51. ПРИМЕР Пусть задан автомат Мура в виде отмеченной таблицы перехода
- 52. Данный автомат может быть представлен в виде графа:
- 53. Автомат Мили будет иметь вид: в виде таблиц перехода и выхода Таблица переходов Таблица выходов
- 54. в виде графа
- 56. Скачать презентацию
Автомат – дискретный преобразователь информации, который на основе входных сигналов, поступающих
Автомат – дискретный преобразователь информации, который на основе входных сигналов, поступающих
Под автоматом будем понимать некоторую математическую модель. Вопросы практической реализации не
Под автоматом будем понимать некоторую математическую модель. Вопросы практической реализации не
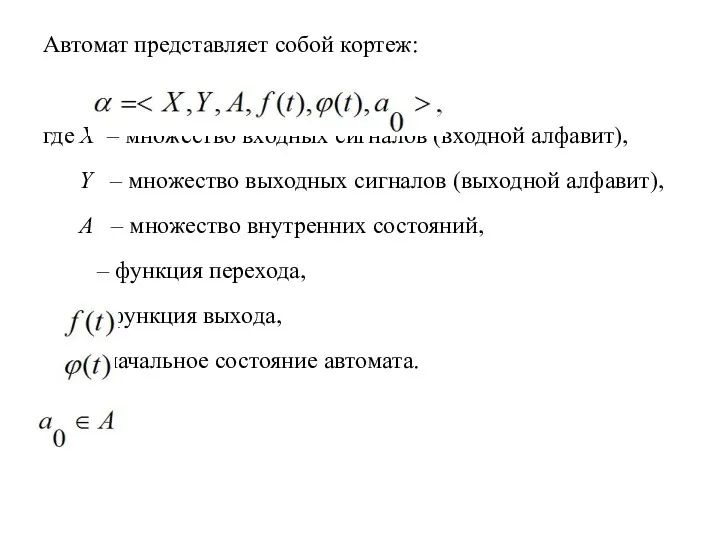
Автомат представляет собой кортеж:
где X – множество входных сигналов (входной алфавит),
Y
Автомат представляет собой кортеж:
где X – множество входных сигналов (входной алфавит),
Y
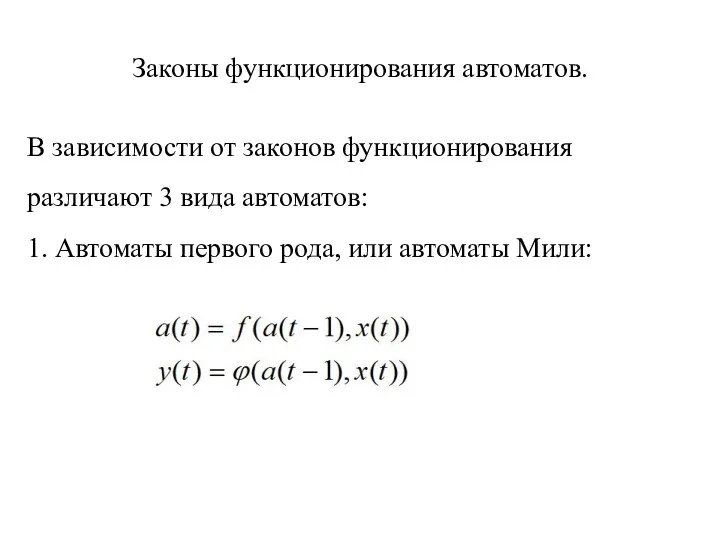
Законы функционирования автоматов.
В зависимости от законов функционирования различают 3 вида автоматов:
1.
Законы функционирования автоматов.
В зависимости от законов функционирования различают 3 вида автоматов:
1.
2. Автоматы второго рода
2. Автоматы второго рода
Правильные автоматы второго рода, или автоматы Мура:
На практике наибольшее распространение получили
Правильные автоматы второго рода, или автоматы Мура:
На практике наибольшее распространение получили
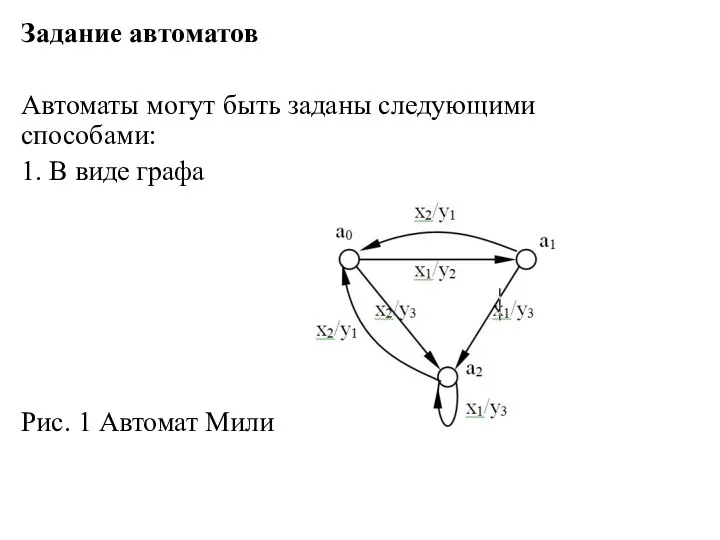
Задание автоматов
Автоматы могут быть заданы следующими способами:
1. В виде графа
Рис. 1
Задание автоматов
Автоматы могут быть заданы следующими способами:
1. В виде графа
Рис. 1
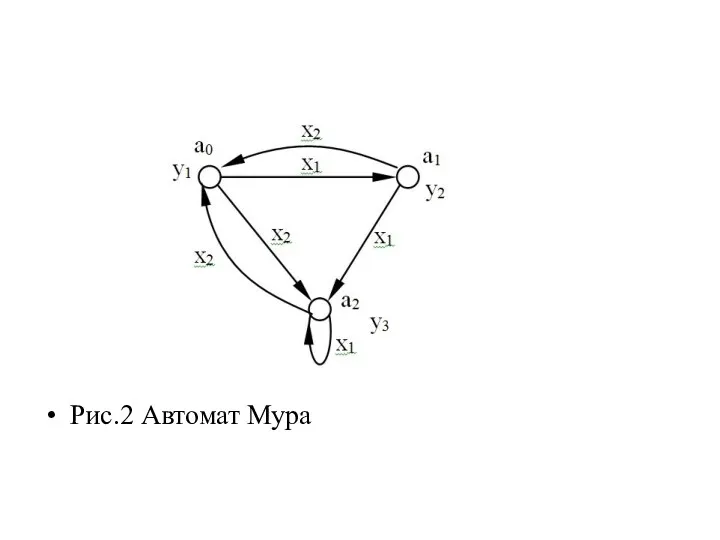
Рис.2 Автомат Мура
Рис.2 Автомат Мура
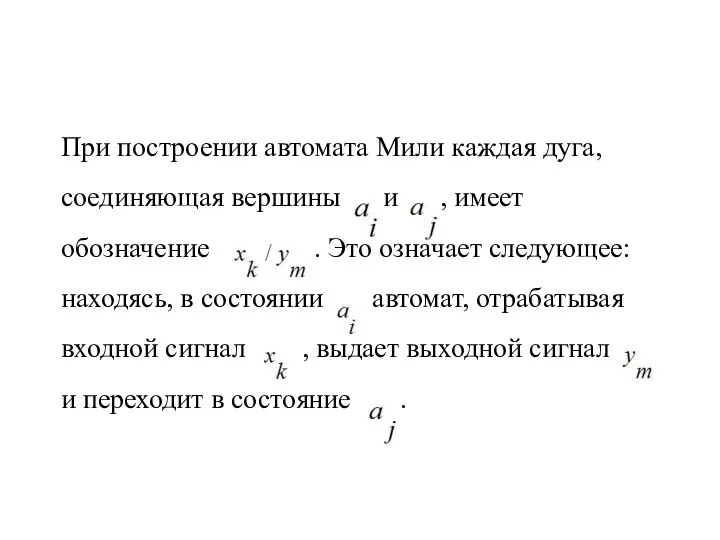
При построении автомата Мили каждая дуга, соединяющая вершины и , имеет
При построении автомата Мили каждая дуга, соединяющая вершины и , имеет
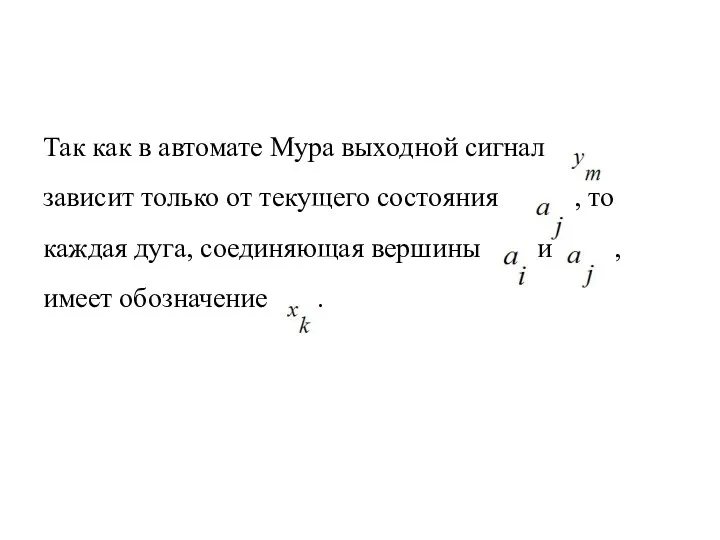
Так как в автомате Мура выходной сигнал зависит только от текущего
Так как в автомате Мура выходной сигнал зависит только от текущего
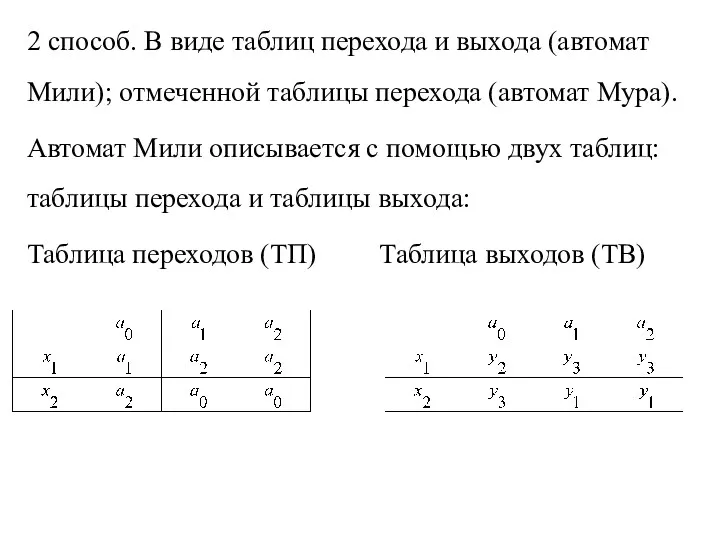
2 способ. В виде таблиц перехода и выхода (автомат Мили); отмеченной
2 способ. В виде таблиц перехода и выхода (автомат Мили); отмеченной
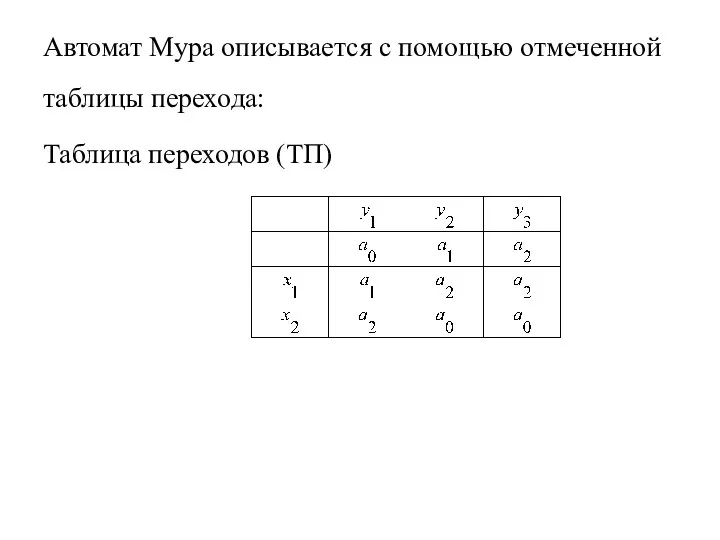
Автомат Мура описывается с помощью отмеченной таблицы перехода:
Таблица переходов (ТП)
Автомат Мура описывается с помощью отмеченной таблицы перехода:
Таблица переходов (ТП)
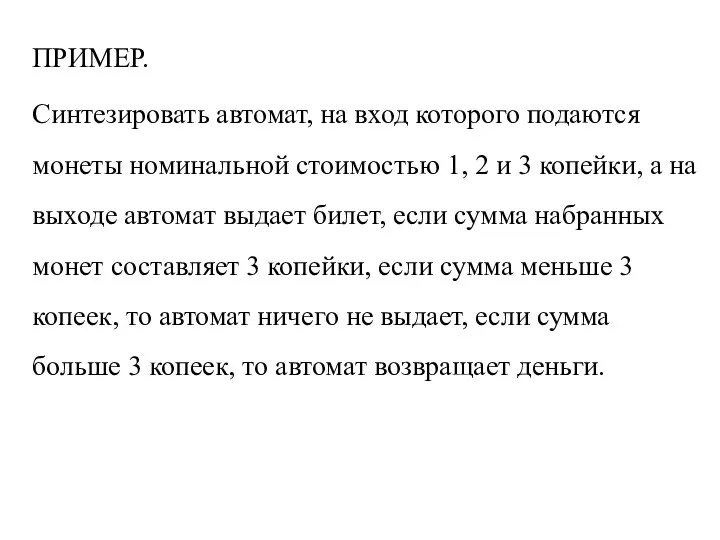
ПРИМЕР.
Синтезировать автомат, на вход которого подаются монеты номинальной стоимостью 1, 2
ПРИМЕР.
Синтезировать автомат, на вход которого подаются монеты номинальной стоимостью 1, 2
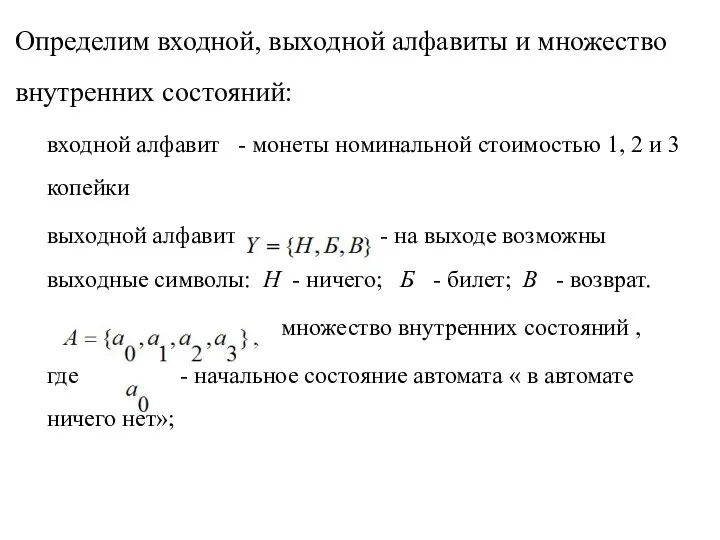
Определим входной, выходной алфавиты и множество внутренних состояний:
входной алфавит - монеты
Определим входной, выходной алфавиты и множество внутренних состояний:
входной алфавит - монеты
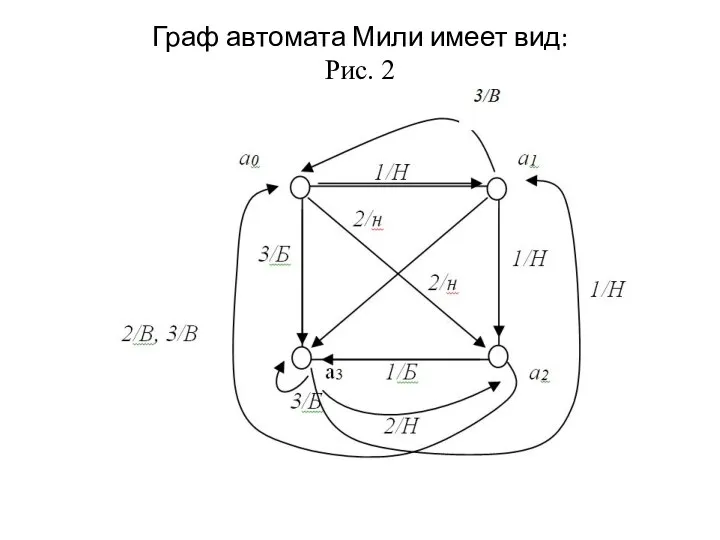
Граф автомата Мили имеет вид:
Рис. 2
Граф автомата Мили имеет вид:
Рис. 2
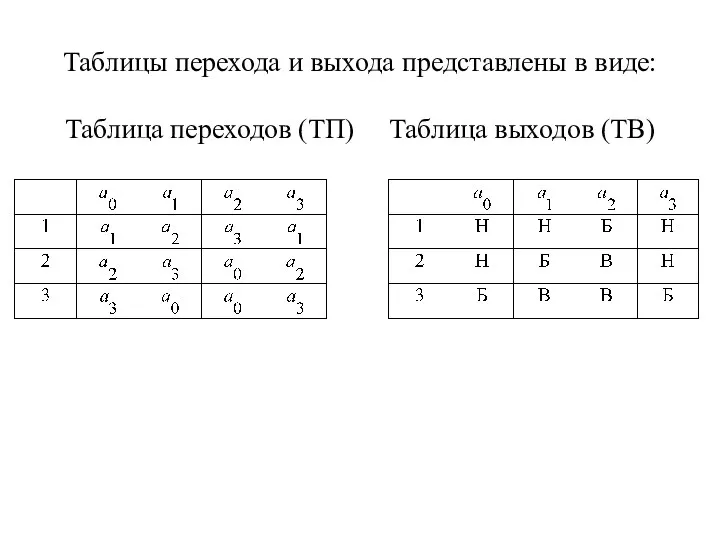
Таблицы перехода и выхода представлены в виде:
Таблица переходов (ТП) Таблица выходов (ТВ)
Таблицы перехода и выхода представлены в виде:
Таблица переходов (ТП) Таблица выходов (ТВ)
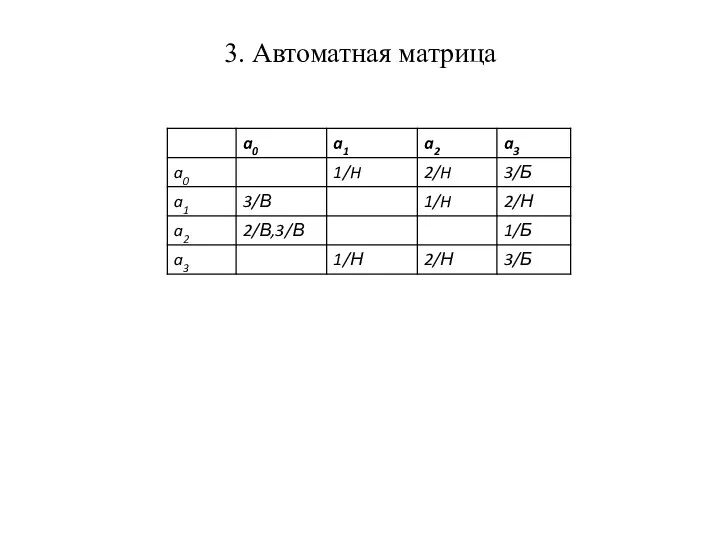
3. Автоматная матрица
3. Автоматная матрица
Неопределенным состоянием называется несуществующее состояние.
Частичным автоматом называется автомат, в котором
Неопределенным состоянием называется несуществующее состояние.
Частичным автоматом называется автомат, в котором
Минимизация автоматов
Входным словом называется совокупность сигналов, поступающих на вход.
Выходным словом называются
Минимизация автоматов
Входным словом называется совокупность сигналов, поступающих на вход.
Выходным словом называются
Два состояния одноэквивалентными , если на одинаковое входное слово выдается одинаковый
Два состояния одноэквивалентными , если на одинаковое входное слово выдается одинаковый
Эквивалентные состояния объединяются в класс эквивалентности.
Минимальный автомат – это автомат, состоящий
Эквивалентные состояния объединяются в класс эквивалентности.
Минимальный автомат – это автомат, состоящий
Алгоритм минимизации автомата Мили
1. По таблице выхода находятся состояния с одинаковыми
Алгоритм минимизации автомата Мили
1. По таблице выхода находятся состояния с одинаковыми
2. По таблице перехода определяются классы двухэквивалентных состояний: для любого класса
2. По таблице перехода определяются классы двухэквивалентных состояний: для любого класса
3. Алгоритм выполняется, пока в классах k-эквивалентных состояний не находятся одинаковые
3. Алгоритм выполняется, пока в классах k-эквивалентных состояний не находятся одинаковые
ПРИМЕР
Пусть задан автомат Мили
Таблица выходов
ПРИМЕР
Пусть задан автомат Мили
Таблица выходов
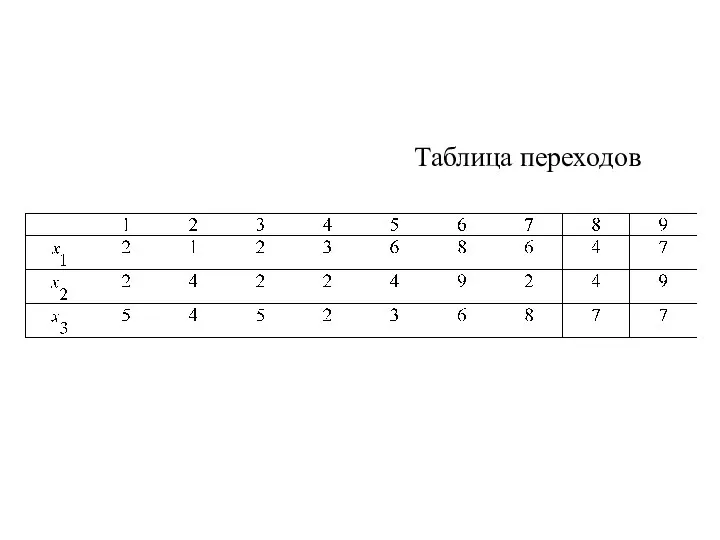
Таблица переходов
Таблица переходов
Определяем класс одноэквивалентных состояний по таблице выхода
Таблица выходов
Определяем класс одноэквивалентных состояний по таблице выхода
Таблица выходов
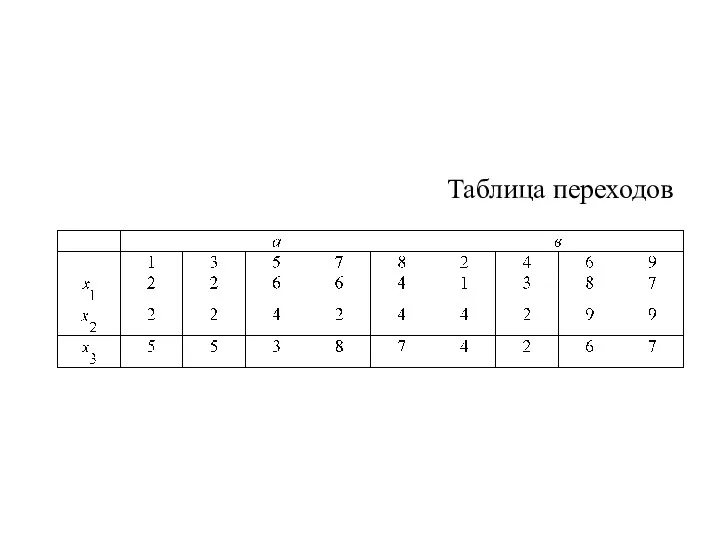
Таблица переходов
Таблица переходов
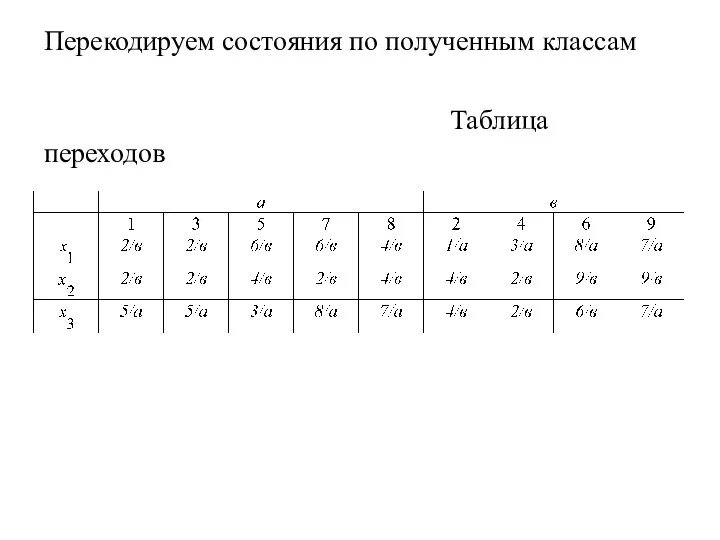
Перекодируем состояния по полученным классам
Таблица переходов
Перекодируем состояния по полученным классам
Таблица переходов
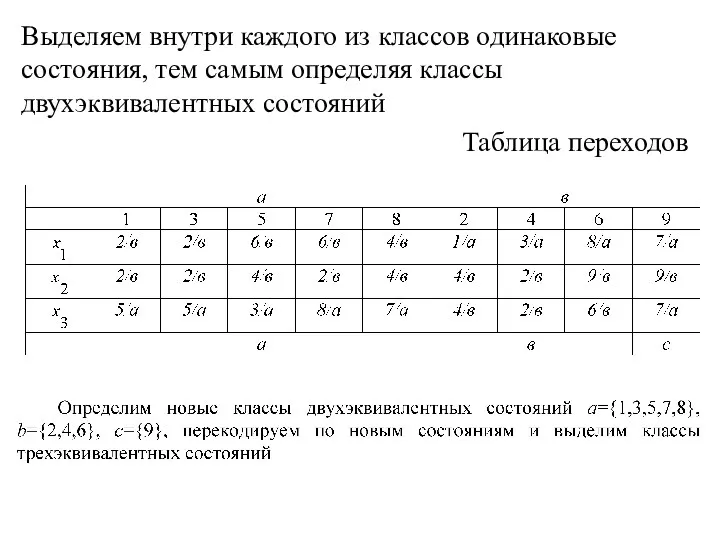
Выделяем внутри каждого из классов одинаковые состояния, тем самым определяя классы
Выделяем внутри каждого из классов одинаковые состояния, тем самым определяя классы
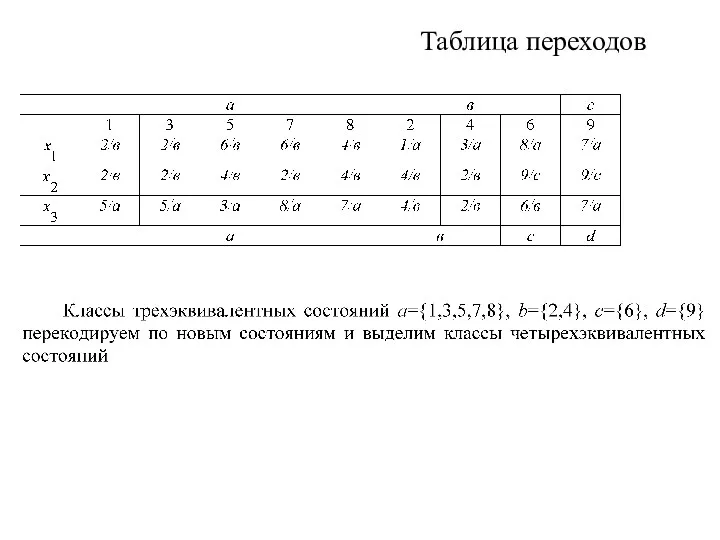
Таблица переходов
Таблица переходов
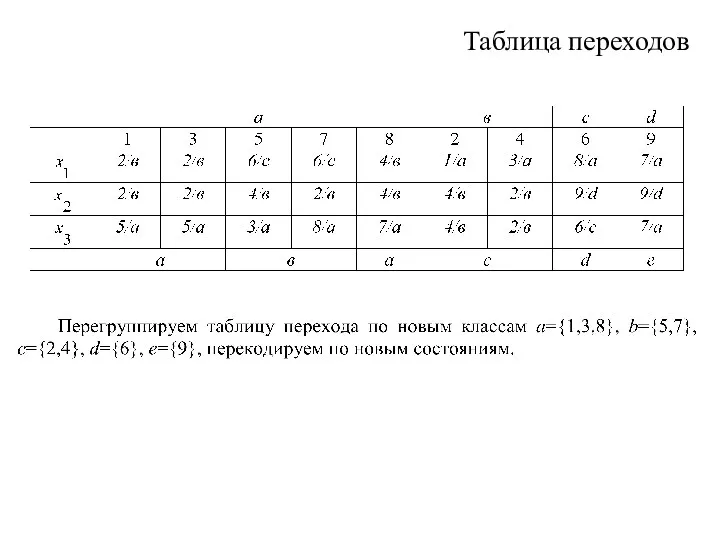
Таблица переходов
Таблица переходов
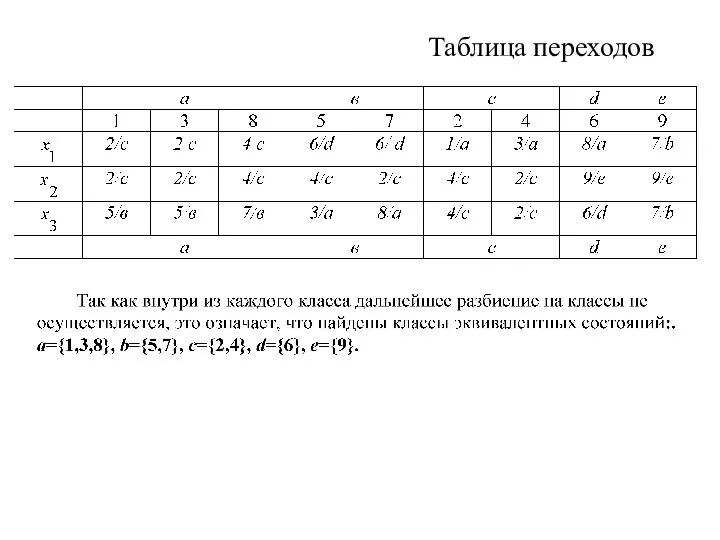
Таблица переходов
Таблица переходов
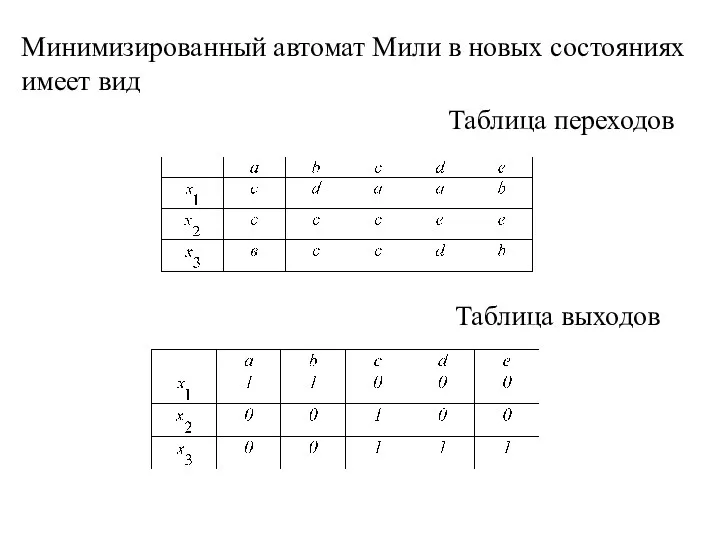
Минимизированный автомат Мили в новых состояниях имеет вид
Таблица переходов
Таблица выходов
Минимизированный автомат Мили в новых состояниях имеет вид
Таблица переходов
Таблица выходов
Особенности минимизации автомата Мура.
Автомат Мура минимизируется аналогично минимизации автомата Мили за
Особенности минимизации автомата Мура.
Автомат Мура минимизируется аналогично минимизации автомата Мили за
Минимизация частичных автоматов.
Для того, чтобы провести минимизацию частичных автоматов неопределенное состояние
Минимизация частичных автоматов.
Для того, чтобы провести минимизацию частичных автоматов неопределенное состояние
Переход от автомата Мили к автомату Мура
Автоматы Мили и автоматы Мура
Переход от автомата Мили к автомату Мура
Автоматы Мили и автоматы Мура
То есть произвольному состоянию автомата Мили и входному сигналу соответствует состояние
То есть произвольному состоянию автомата Мили и входному сигналу соответствует состояние
Таким образом, можно перекодировать таблицу перехода автомата Мили и составить отмеченную
Таким образом, можно перекодировать таблицу перехода автомата Мили и составить отмеченную
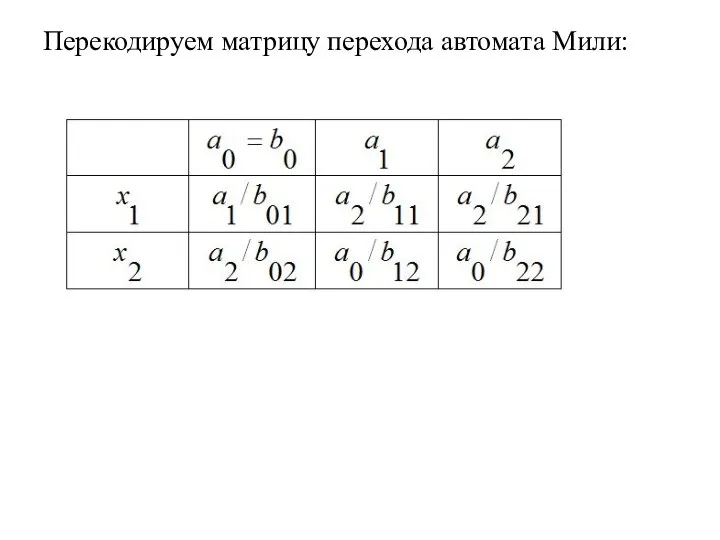
Перекодируем матрицу перехода автомата Мили:
Перекодируем матрицу перехода автомата Мили:
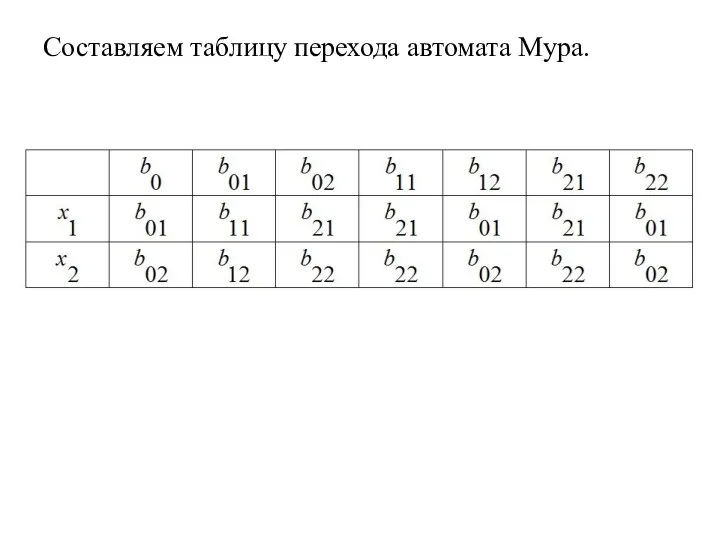
Составляем таблицу перехода автомата Мура.
Составляем таблицу перехода автомата Мура.
При составлении таблицы перехода автомата Мили рассуждаем следующим образом: состояние автомата
При составлении таблицы перехода автомата Мили рассуждаем следующим образом: состояние автомата
Так как в автомате Мура произвольному состоянию соответствует некоторый выходной сигнал,
Так как в автомате Мура произвольному состоянию соответствует некоторый выходной сигнал,
Выходной сигнал, соответствующий состоянию , выбирается произвольно.
Выходной сигнал, соответствующий состоянию , выбирается произвольно.
Если автомат Мили содержит m-состояний и n входных символов, то количество
Если автомат Мили содержит m-состояний и n входных символов, то количество
Переход от автомата Мура к автомату Мили
Переход от автомата Мура к
Переход от автомата Мура к автомату Мили
Переход от автомата Мура к
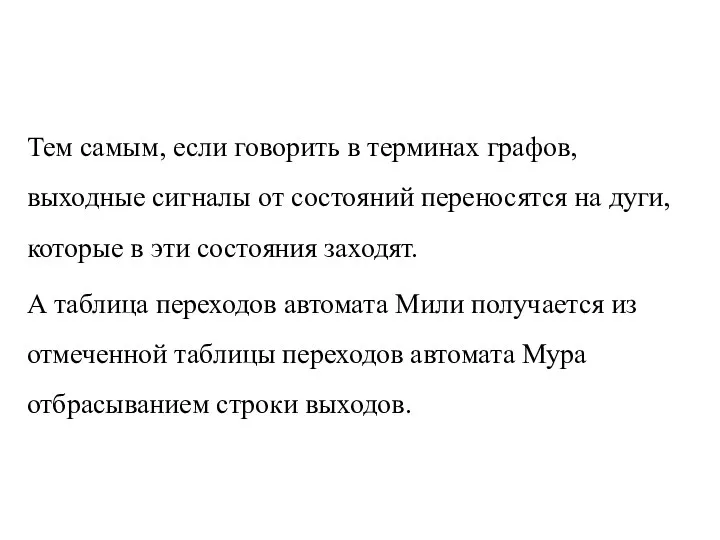
Тем самым, если говорить в терминах графов, выходные сигналы от состояний
Тем самым, если говорить в терминах графов, выходные сигналы от состояний
ПРИМЕР
Пусть задан автомат Мура в виде отмеченной таблицы перехода
ПРИМЕР
Пусть задан автомат Мура в виде отмеченной таблицы перехода
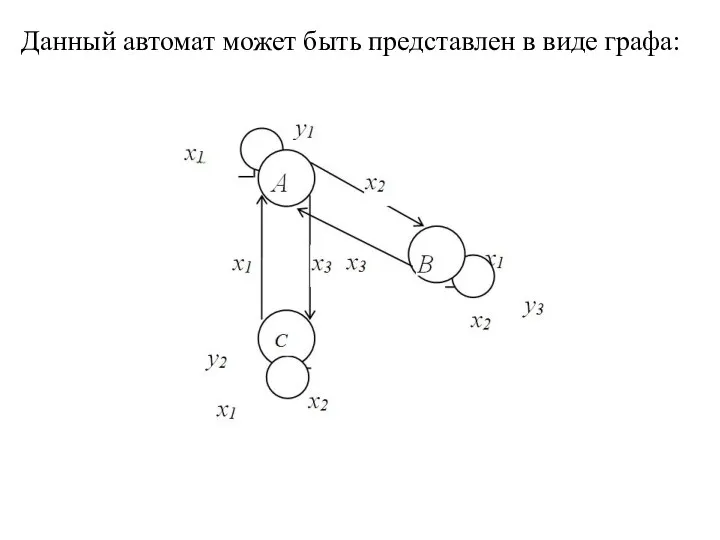
Данный автомат может быть представлен в виде графа:
Данный автомат может быть представлен в виде графа:
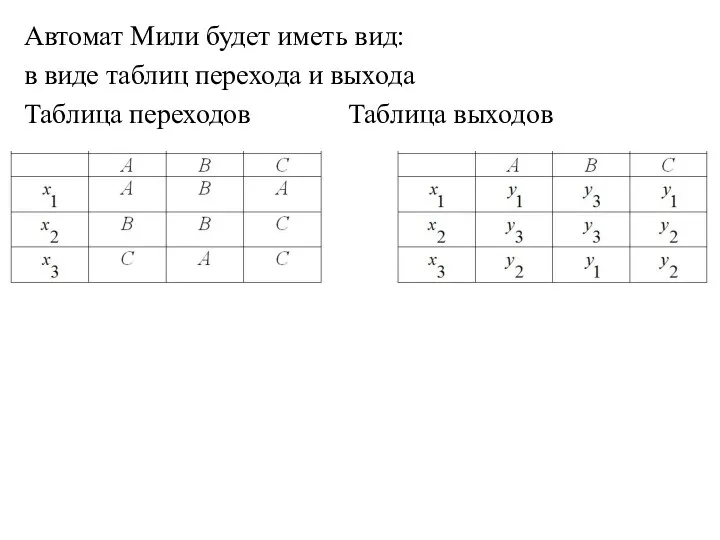
Автомат Мили будет иметь вид:
в виде таблиц перехода и выхода
Таблица
Автомат Мили будет иметь вид:
в виде таблиц перехода и выхода
Таблица
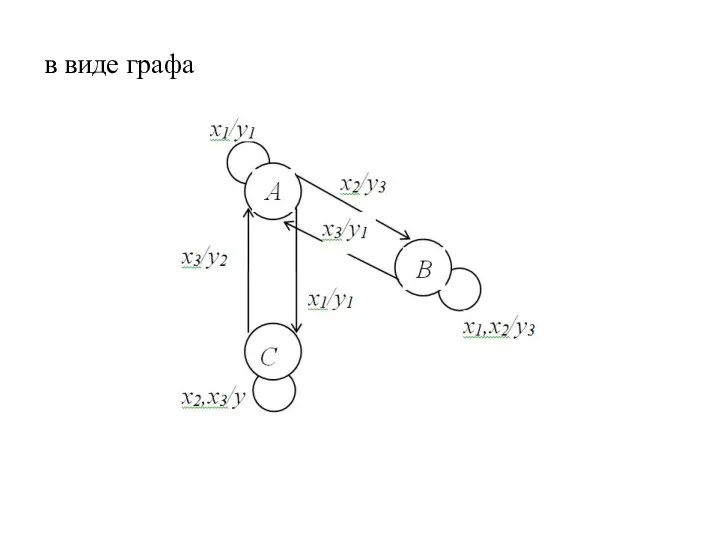
в виде графа
в виде графа
 Пресс-службы в органах власти
Пресс-службы в органах власти Computer club. Бизнес-проект
Computer club. Бизнес-проект Сотовые и спутниковые системы
Сотовые и спутниковые системы Язык разметки гипертекста HTML
Язык разметки гипертекста HTML Проектирование баз данных
Проектирование баз данных Публицистический стиль. Основные признаки. Подстили и жанры. Языковые особенности
Публицистический стиль. Основные признаки. Подстили и жанры. Языковые особенности Технология Drag and Drop
Технология Drag and Drop Своя игра по информатике
Своя игра по информатике Презентация Инновационные подходы в образовании
Презентация Инновационные подходы в образовании Warcraft III
Warcraft III The method of software upgrade for tablet PC B902
The method of software upgrade for tablet PC B902 Электронные услуги в сфере образования
Электронные услуги в сфере образования Введение в цикл разработки ПО
Введение в цикл разработки ПО Общие свойства объектов одного класса. Информатика, 3 класс, 1 часть
Общие свойства объектов одного класса. Информатика, 3 класс, 1 часть Алгоритмы и исполнители
Алгоритмы и исполнители Сети и системы телекоммуникаций. Транспортный уровень
Сети и системы телекоммуникаций. Транспортный уровень Вирусы и антивирусы
Вирусы и антивирусы Гуманитарные образовательные технологии как отражение инновационных процессов в образовании
Гуманитарные образовательные технологии как отражение инновационных процессов в образовании Понятие. Понятие личности
Понятие. Понятие личности Теория автоматов и формальных языков
Теория автоматов и формальных языков Циклические структуры
Циклические структуры ФГИС ЕГРН. Общая информация
ФГИС ЕГРН. Общая информация Система стандартов по информации, библиотечному и издательскому делу. Организационно-распорядительная документация
Система стандартов по информации, библиотечному и издательскому делу. Организационно-распорядительная документация Язык HTML — язык тегов
Язык HTML — язык тегов Международная журналистика
Международная журналистика Алгоритмы на графах
Алгоритмы на графах Самостоятельная работа по информатике 6 класс. классификации
Самостоятельная работа по информатике 6 класс. классификации Программирование на языке Си#. Форма. Лекция 40
Программирование на языке Си#. Форма. Лекция 40