- Теория автоматов. (Лекция 11)

Содержание
- 2. ЛЕКЦИЯ 1
- 3. 1.1 Предмет
- 4. Предмет ТЕОРИЯ АВТОМАТОВ введет в курс и даст начальные представления о: важнейших классических основных моделях автоматов;
- 5. Термин > используется в двух аспектах: Автомат, как устройство, восполняющее все действия без участия человека. Автомат
- 6. 1.2 Задачи курса Из выступлений на семинаре «SoftWare 2000». Brun Randell: Я помню Дуга Росса из
- 7. ЛЕКЦИИ 2 и 3 – изучаются информационные основы работы и представления информации в цифровых автоматах. Выбор
- 8. ЛЕКЦИИ 16-17 – посвящаются изучению основ логического проектирования и контролю работы цифрового автомата. Практические занятия рассчитаны
- 9. 1.3 Два вида информации ЭВМ – решают самые разнообразные задачи. Для этого нужно с помощью программы
- 10. В ЭВМ в качестве основной формы представления информации служат электрические сигналы (напряжение постоянного тока), нужны провода
- 11. В первом случае представление информации называется аналоговой или непрерывной (Сходной с величиной аналога Х). Величины могут
- 13. Сравнивая непрерывную и дискретную форму представления информации можно сказать, что при использовании непрерывной формы, создателю ЭВМ
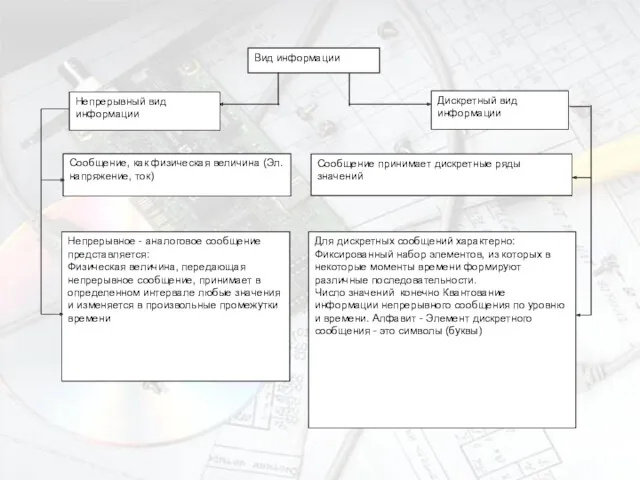
- 14. Непрерывное (аналоговое) сообщение представляется некоторой физической величиной (электрическим напряжением, током и др.), изменение которой во времени
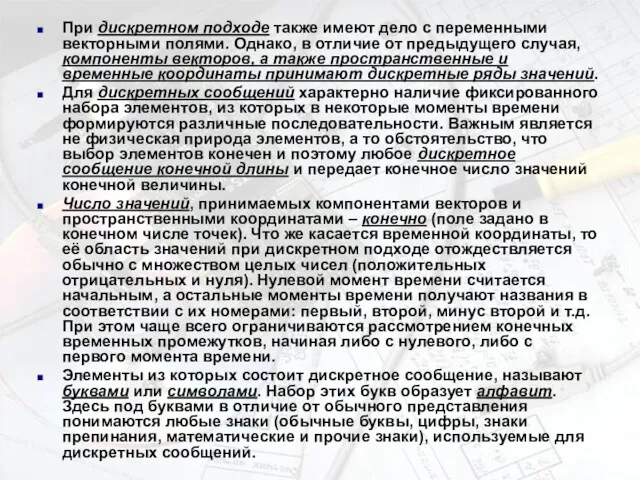
- 15. При дискретном подходе также имеют дело с переменными векторными полями. Однако, в отличие от предыдущего случая,
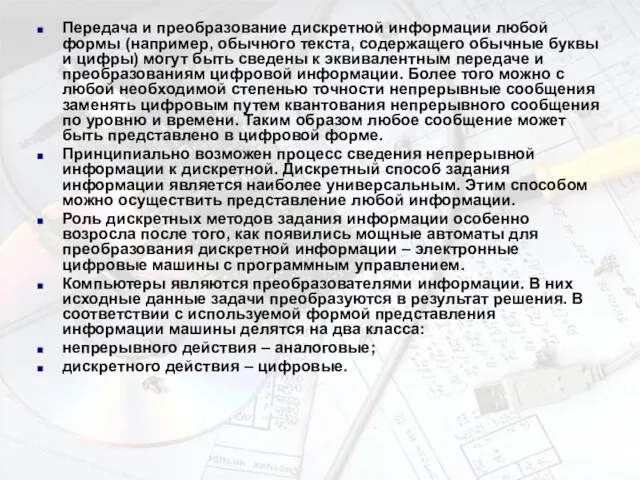
- 16. Передача и преобразование дискретной информации любой формы (например, обычного текста, содержащего обычные буквы и цифры) могут
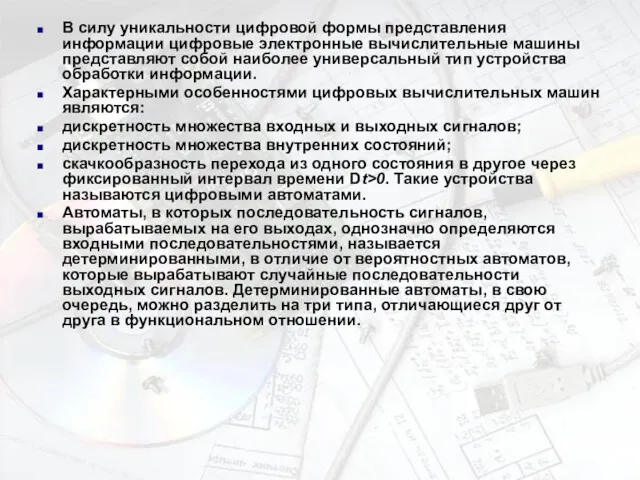
- 17. В силу уникальности цифровой формы представления информации цифровые электронные вычислительные машины представляют собой наиболее универсальный тип
- 18. Рисунок 1.2
- 19. В автоматах 1 ТИПА выходной сигнал в момент времени t+dt (где dt – запаздывание, обусловленное физическими
- 20. Таким образом приходим к понятию конечного автомата, как устройства имеющего конечное число внутренних состояний и конечное
- 21. ЛЕКЦИЯ 2 Модель автомата
- 22. 1.4 Автоматы. Состав и основные определения Модель автомата включает в себя: функциональную модель автомата; структурную модель
- 24. Функциональная модель автомата содержит информацию о том, как автомат работает. Структурная модель автомата должна показывать, как
- 26. Абстрактный автомат А задаётся как совокупность шести объектов: 1) – конечного множества Х входных сигналов, называемого
- 27. Абстрактный автомат функционирует в дискретном времени, t = 0,1,2… . В каждый момент t этого времени
- 28. 1.5 Интерпретация автоматов Абстрактный автомат – смысл состоит в реализации некоторого отображения множества слов входного алфавита
- 29. Даже с прикладной точки зрения интерпретация автомата как устройства не является универсальной. Хорошо известно, что всякое
- 30. В дискретных автоматах принято обычно отождествлять буквы используемого стандартного алфавита с цифрами той или иной системы
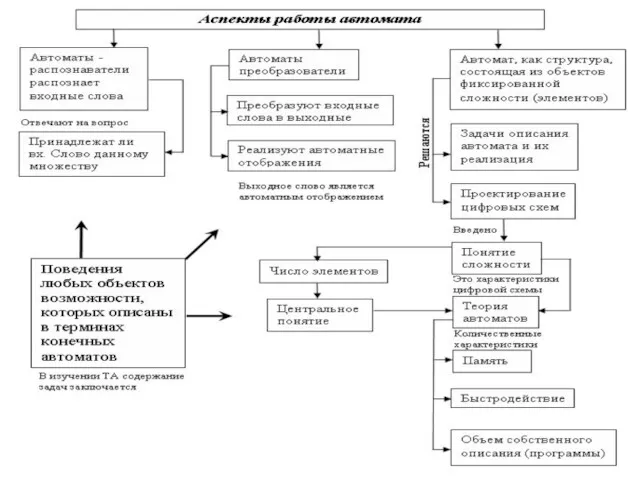
- 32. Автоматы → удобный язык для описывания законов взаимодействия сложных систем → метаязык кибернетики. Можно выделить два
- 33. Наконец, третий круг задач теории автоматов – это задачи описания автоматов и их реализации, т.е. представление
- 34. Очевидно, что содержательный интерес таких задач не во взаимодействии цифровых схем, а в поведении любых объектов
- 35. ЛЕКЦИЯ 3 Функциональные модели автоматов .
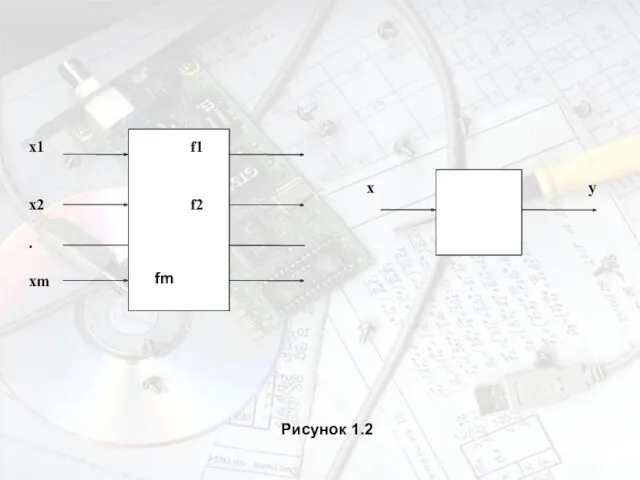
- 36. 1.6 Функциональные модели автоматов Для представления функционирования модели автомата необходимо представить модель вх/вых переменных. Поведение любого
- 37. ВХОДНЫМИ называются те переменные, значения которых задаются извне и не определяются самим устройством, а напротив влияют
- 38. Можно отказаться также от рассмотрения «промежуточных» значений, не принадлежащих ни одному из выделенных интервалов «пробегаемых» физической
- 39. При этом считается, что если физическая переменная устройства принимает значение в некотором интервале, то дискретная переменная
- 40. U 0 1 2 3 4 5 6 7 8 9 Рисунок 1.1
- 41. Можно рассмотреть отношение с другой стороны, говоря о физическом представлении или о физической реализации логических переменных.
- 42. x1 x2 . xm f1 f2 fm x y Рисунок 1.2
- 43. Отсюда непосредственно следует, что каждая двоичная переменная ,представляющая состояния некоторого выходного полюса комбинационного автомата, является булевой
- 44. Реализуемая комбинационным автоматом система булевых функций представляет функциональные свойства автомата и может рассматриваться, как его функциональная
- 45. Легко подсчитать, что существует 2n различных состояний входа или входных состояний (здесь n- число входных полюсов
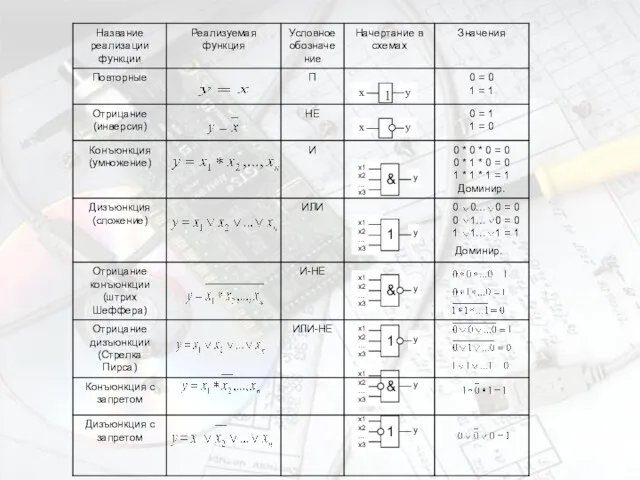
- 46. Назначением элементарных преобразователей, является преобразование физического представления логических переменных. В частности к числу элементарных преобразователей можно
- 47. Конъюнкция элементарных событий и связь между ними. Пусть двоичные переменные x1, x2, …, xn образующие множество
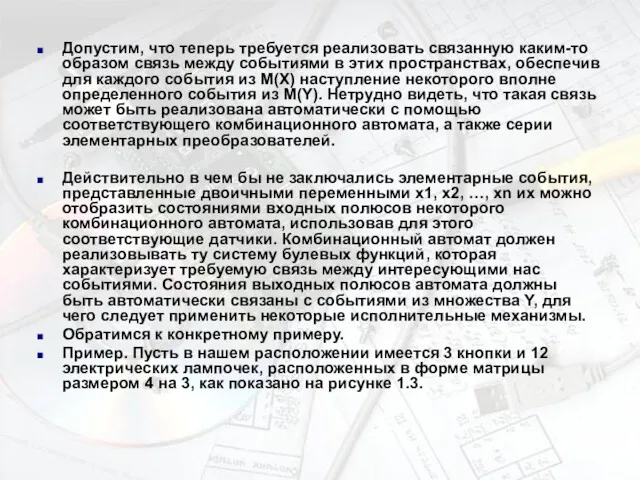
- 48. Допустим, что теперь требуется реализовать связанную каким-то образом связь между событиями в этих пространствах, обеспечив для
- 49. a b c y3 y6 y9 y12 y2 y5 y8 y11 y1 y4 y7 y10 кнопки
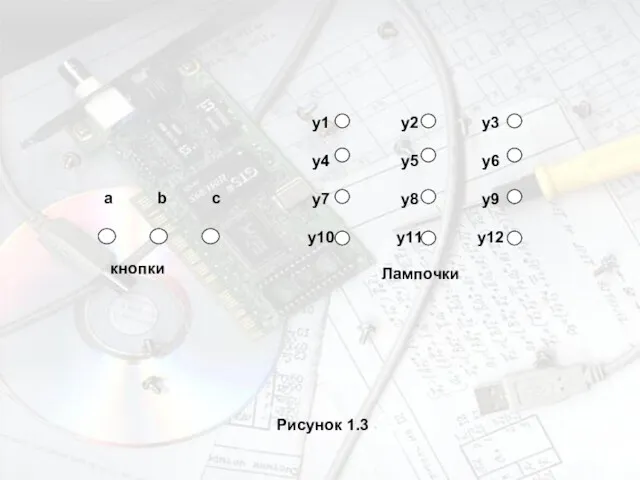
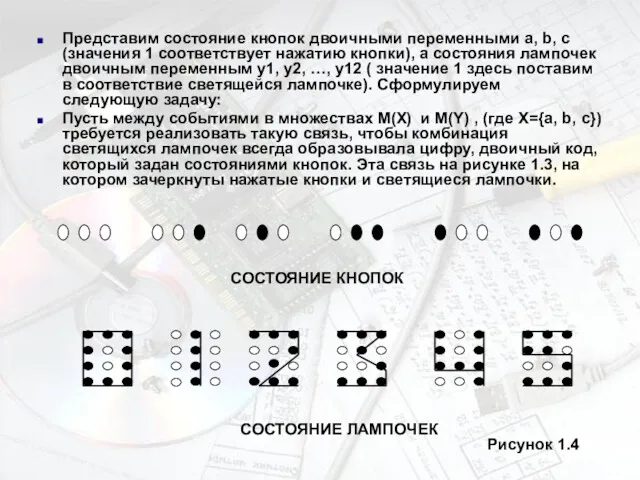
- 50. Представим состояние кнопок двоичными переменными a, b, c (значения 1 соответствует нажатию кнопки), а состояния лампочек
- 51. СОСТОЯНИЕ КНОПОК СОСТОЯНИЕ ЛАМПОЧЕК Рисунок 1.4 (продолжение.)
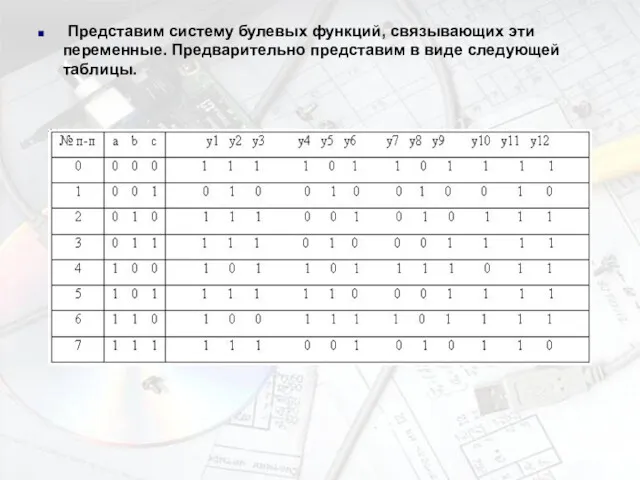
- 52. Представим систему булевых функций, связывающих эти переменные. Предварительно представим в виде следующей таблицы.
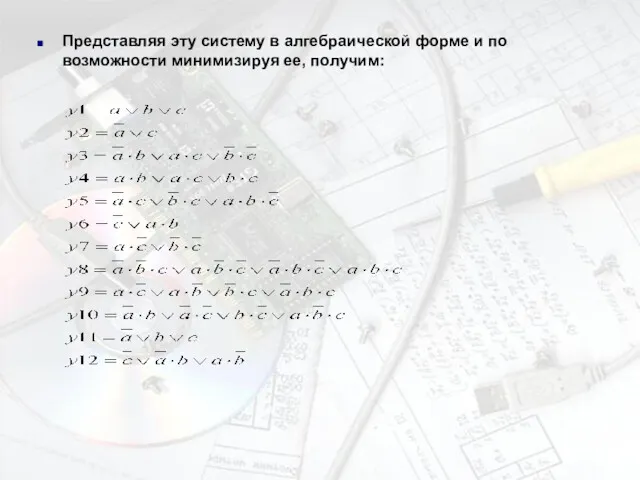
- 53. Представляя эту систему в алгебраической форме и по возможности минимизируя ее, получим:
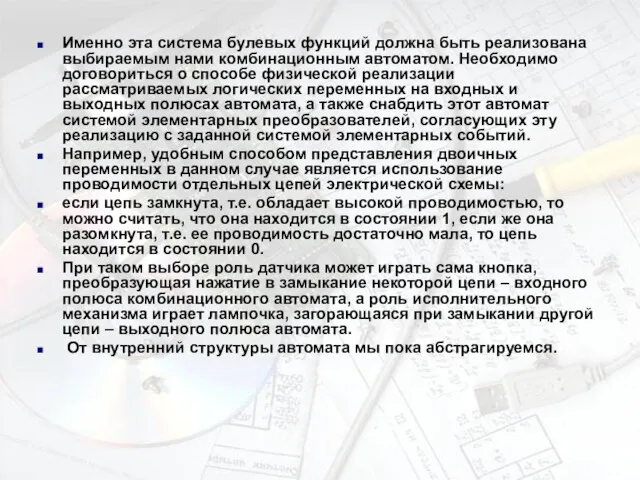
- 54. Именно эта система булевых функций должна быть реализована выбираемым нами комбинационным автоматом. Необходимо договориться о способе
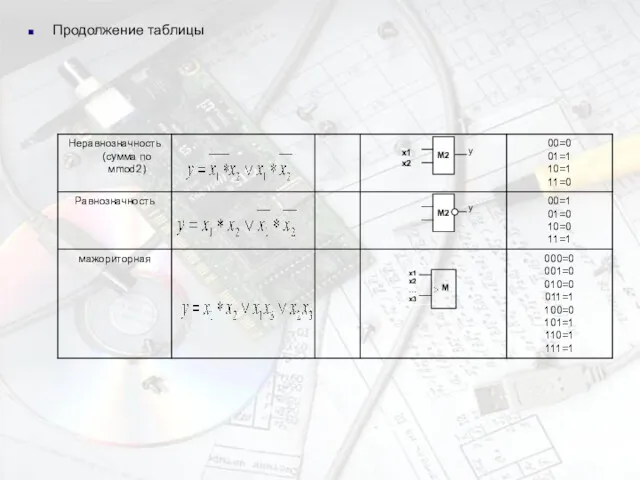
- 56. Продолжение таблицы x1 x2
- 57. ЛЕКЦИЯ 4
- 58. Последовательностные автоматы Изменение во времени состояния входа комбинационного автомата, мы можем получить некоторую последовательность входных состояний,
- 59. Принципиально по другому ведет себя автомат с памятью или последовательностный автомат. Само это название говорит о
- 60. Заметим, что множество всевозможных значений булева вектора x, используемых для представления входных состояний автомата, принято называть
- 61. Синхронный автомат Наиболее известной разновидностью последовательностный автоматов является синхронный и асинхронный автоматы. Синхронный способ заключается в
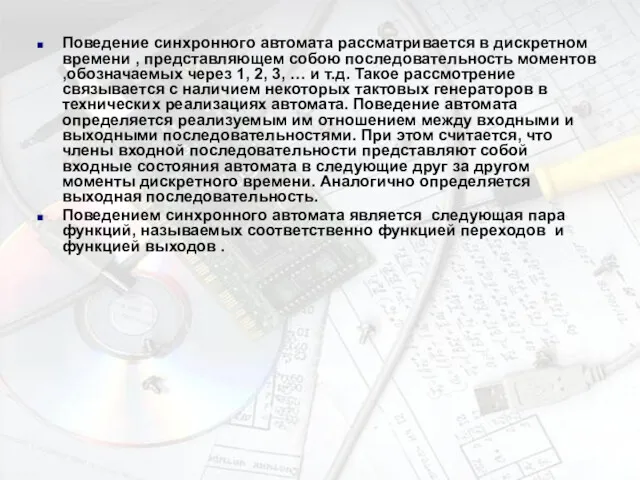
- 62. Поведение синхронного автомата рассматривается в дискретном времени , представляющем собою последовательность моментов ,обозначаемых через 1, 2,
- 63. Пример последовательностного автомата Как можно упростить решение задачи? В силовой установке необходимо постоянно контролировать направления вращения
- 64. Рисунок 2.1.
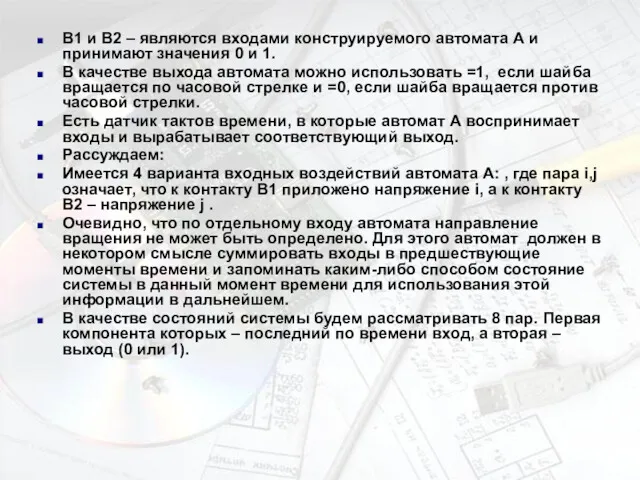
- 65. B1 и B2 – являются входами конструируемого автомата А и принимают значения 0 и 1. В
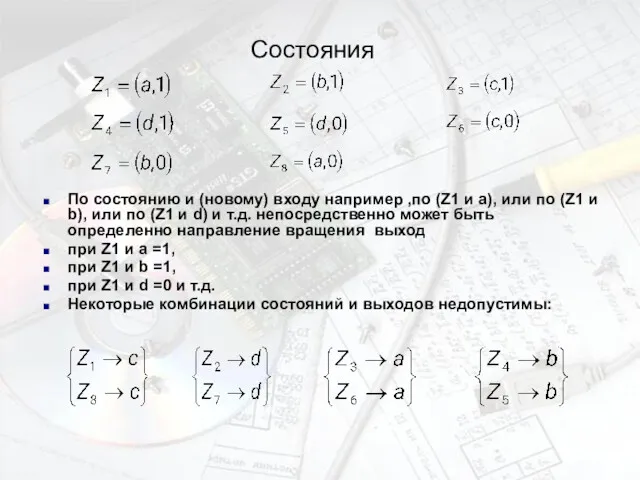
- 66. Состояния По состоянию и (новому) входу например ,по (Z1 и a), или по (Z1 и b),
- 67. Следует предполагать, что произошла ошибка и автомат должен порождать выход 1, сигнализирующий об этом. Мы будем
- 68. Таблица
- 70. Скачать презентацию
ЛЕКЦИЯ 1
ЛЕКЦИЯ 1

1.1 Предмет
1.1 Предмет
Предмет ТЕОРИЯ АВТОМАТОВ введет в курс и даст начальные представления о:
важнейших
Предмет ТЕОРИЯ АВТОМАТОВ введет в курс и даст начальные представления о:
важнейших
Термин <<автомат>> используется в двух аспектах:
Автомат, как устройство, восполняющее все действия
Термин <<автомат>> используется в двух аспектах:
Автомат, как устройство, восполняющее все действия
1.2 Задачи курса
Из выступлений на семинаре «SoftWare 2000».
Brun Randell:
Я помню Дуга
1.2 Задачи курса
Из выступлений на семинаре «SoftWare 2000».
Brun Randell:
Я помню Дуга
ЛЕКЦИИ 2 и 3 – изучаются информационные основы работы и представления
ЛЕКЦИИ 2 и 3 – изучаются информационные основы работы и представления
ЛЕКЦИИ 16-17 – посвящаются изучению основ логического проектирования и контролю работы
ЛЕКЦИИ 16-17 – посвящаются изучению основ логического проектирования и контролю работы
1.3 Два вида информации
ЭВМ – решают самые разнообразные задачи.
Для этого нужно
1.3 Два вида информации
ЭВМ – решают самые разнообразные задачи.
Для этого нужно
В ЭВМ в качестве основной формы представления информации служат электрические сигналы
В ЭВМ в качестве основной формы представления информации служат электрические сигналы
В первом случае представление информации называется аналоговой или непрерывной (Сходной с
В первом случае представление информации называется аналоговой или непрерывной (Сходной с
Сравнивая непрерывную и дискретную форму представления информации можно сказать, что при
Сравнивая непрерывную и дискретную форму представления информации можно сказать, что при
Непрерывное (аналоговое) сообщение представляется некоторой физической величиной (электрическим напряжением, током и
Непрерывное (аналоговое) сообщение представляется некоторой физической величиной (электрическим напряжением, током и
При дискретном подходе также имеют дело с переменными векторными полями. Однако,
При дискретном подходе также имеют дело с переменными векторными полями. Однако,
Передача и преобразование дискретной информации любой формы (например, обычного текста, содержащего
Передача и преобразование дискретной информации любой формы (например, обычного текста, содержащего
В силу уникальности цифровой формы представления информации цифровые электронные вычислительные машины
В силу уникальности цифровой формы представления информации цифровые электронные вычислительные машины
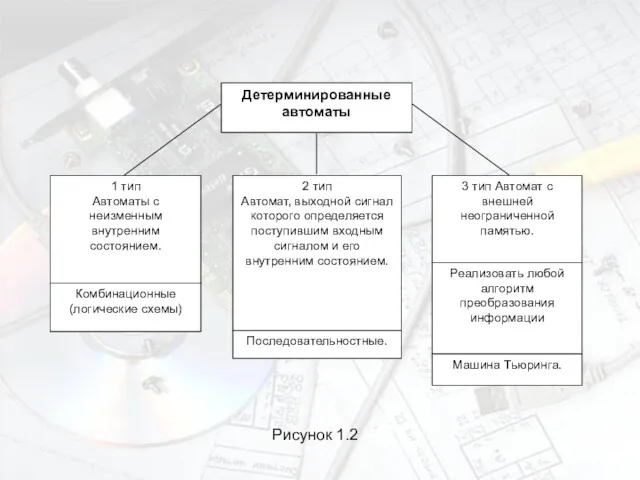
Рисунок 1.2
Рисунок 1.2
В автоматах 1 ТИПА выходной сигнал в момент времени t+dt (где
В автоматах 1 ТИПА выходной сигнал в момент времени t+dt (где
Таким образом приходим к понятию конечного автомата, как устройства имеющего конечное
Таким образом приходим к понятию конечного автомата, как устройства имеющего конечное
ЛЕКЦИЯ 2
Модель автомата
ЛЕКЦИЯ 2
Модель автомата
1.4 Автоматы. Состав и основные определения
Модель автомата включает в себя:
функциональную модель
1.4 Автоматы. Состав и основные определения
Модель автомата включает в себя:
функциональную модель
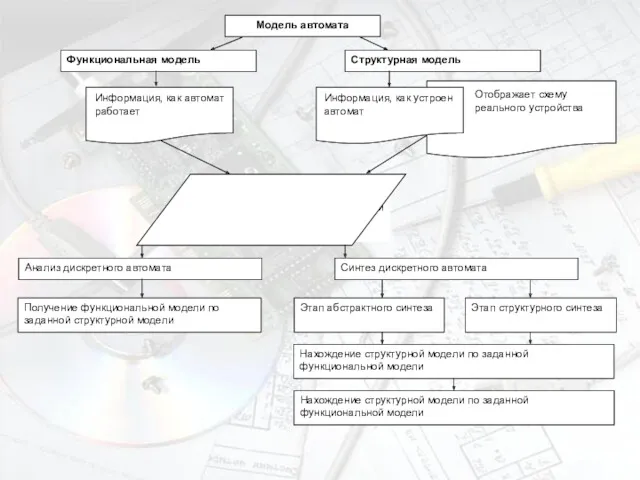
Функциональная модель автомата содержит информацию о том, как автомат работает. Структурная
Функциональная модель автомата содержит информацию о том, как автомат работает. Структурная
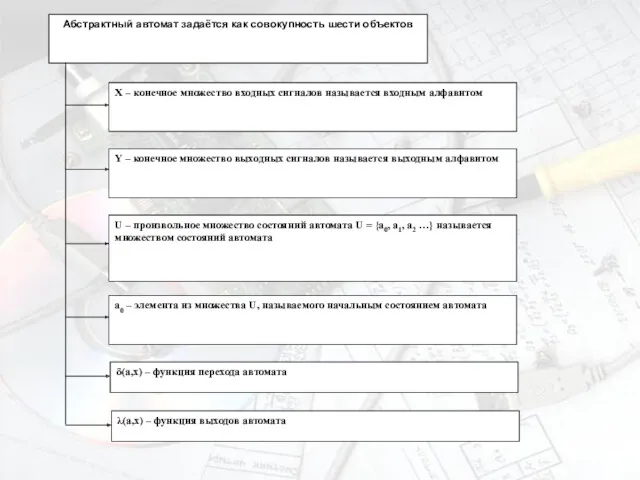
Абстрактный автомат А задаётся как совокупность шести объектов:
1) – конечного множества
Абстрактный автомат А задаётся как совокупность шести объектов:
1) – конечного множества
Абстрактный автомат функционирует в дискретном времени, t = 0,1,2… . В
Абстрактный автомат функционирует в дискретном времени, t = 0,1,2… . В
1.5 Интерпретация автоматов
Абстрактный автомат – смысл состоит в реализации некоторого отображения
1.5 Интерпретация автоматов
Абстрактный автомат – смысл состоит в реализации некоторого отображения
Даже с прикладной точки зрения интерпретация автомата как устройства не является
Даже с прикладной точки зрения интерпретация автомата как устройства не является
В дискретных автоматах принято обычно отождествлять буквы используемого стандартного алфавита с
В дискретных автоматах принято обычно отождествлять буквы используемого стандартного алфавита с
Автоматы → удобный язык для описывания законов взаимодействия сложных систем →
Автоматы → удобный язык для описывания законов взаимодействия сложных систем →
Наконец, третий круг задач теории автоматов – это задачи описания автоматов
Наконец, третий круг задач теории автоматов – это задачи описания автоматов
Очевидно, что содержательный интерес таких задач не во взаимодействии цифровых схем,
Очевидно, что содержательный интерес таких задач не во взаимодействии цифровых схем,
ЛЕКЦИЯ 3
Функциональные модели автоматов
.
ЛЕКЦИЯ 3
Функциональные модели автоматов
.
1.6 Функциональные модели автоматов
Для представления функционирования модели автомата необходимо представить модель
1.6 Функциональные модели автоматов
Для представления функционирования модели автомата необходимо представить модель
ВХОДНЫМИ называются те переменные, значения которых задаются извне и не определяются
ВХОДНЫМИ называются те переменные, значения которых задаются извне и не определяются
Можно отказаться также от рассмотрения «промежуточных» значений, не принадлежащих ни одному
Можно отказаться также от рассмотрения «промежуточных» значений, не принадлежащих ни одному
При этом считается, что если физическая переменная устройства принимает значение в
При этом считается, что если физическая переменная устройства принимает значение в

U
0 1 2 3 4 5 6 7 8 9
Рисунок 1.1
U
0 1 2 3 4 5 6 7 8 9
Рисунок 1.1
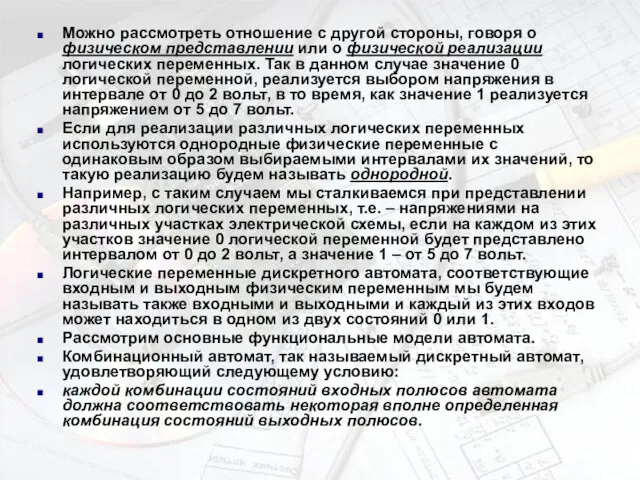
Можно рассмотреть отношение с другой стороны, говоря о физическом представлении или
Можно рассмотреть отношение с другой стороны, говоря о физическом представлении или
x1
x2
.
xm
f1
f2
fm
x
y
Рисунок 1.2
x1
x2
.
xm
f1
f2
fm
x
y
Рисунок 1.2
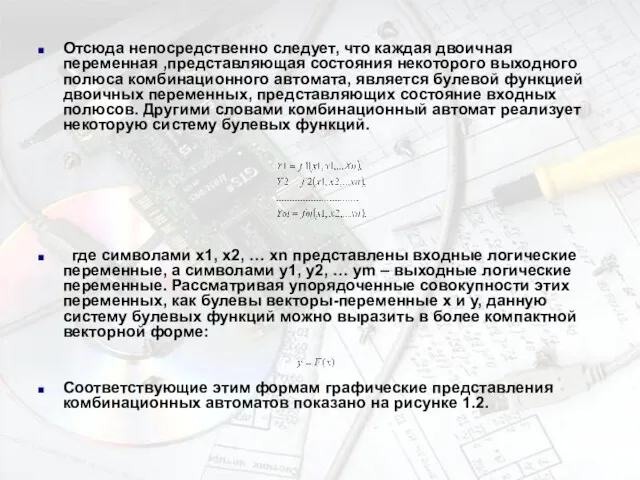
Отсюда непосредственно следует, что каждая двоичная переменная ,представляющая состояния некоторого выходного
Отсюда непосредственно следует, что каждая двоичная переменная ,представляющая состояния некоторого выходного
Реализуемая комбинационным автоматом система булевых функций представляет функциональные свойства автомата и
Реализуемая комбинационным автоматом система булевых функций представляет функциональные свойства автомата и
Легко подсчитать, что существует 2n различных состояний входа или входных состояний
Назначением элементарных преобразователей, является преобразование физического представления логических переменных. В частности
Назначением элементарных преобразователей, является преобразование физического представления логических переменных. В частности
Конъюнкция элементарных событий и связь между ними.
Пусть двоичные переменные x1, x2,
Конъюнкция элементарных событий и связь между ними.
Пусть двоичные переменные x1, x2,
Допустим, что теперь требуется реализовать связанную каким-то образом связь между событиями
Допустим, что теперь требуется реализовать связанную каким-то образом связь между событиями
a b c
y3
y6
y9
y12
y2
y5
y8
y11
y1
y4
y7
y10
a b c
y3
y6
y9
y12
y2
y5
y8
y11
y1
y4
y7
y10
Представим состояние кнопок двоичными переменными a, b, c (значения 1 соответствует
Представим состояние кнопок двоичными переменными a, b, c (значения 1 соответствует

СОСТОЯНИЕ КНОПОК
СОСТОЯНИЕ ЛАМПОЧЕК
Рисунок 1.4 (продолжение.)
СОСТОЯНИЕ КНОПОК
СОСТОЯНИЕ ЛАМПОЧЕК
Рисунок 1.4 (продолжение.)
Представим систему булевых функций, связывающих эти переменные. Предварительно представим в
Представим систему булевых функций, связывающих эти переменные. Предварительно представим в
Представляя эту систему в алгебраической форме и по возможности минимизируя ее,
Представляя эту систему в алгебраической форме и по возможности минимизируя ее,
Именно эта система булевых функций должна быть реализована выбираемым нами комбинационным
Именно эта система булевых функций должна быть реализована выбираемым нами комбинационным
Продолжение таблицы
x1
x2
Продолжение таблицы
x1
x2

ЛЕКЦИЯ 4
ЛЕКЦИЯ 4
Последовательностные автоматы
Изменение во времени состояния входа комбинационного автомата, мы можем получить
Последовательностные автоматы
Изменение во времени состояния входа комбинационного автомата, мы можем получить
Принципиально по другому ведет себя автомат с памятью или последовательностный автомат.
Принципиально по другому ведет себя автомат с памятью или последовательностный автомат.
Заметим, что множество всевозможных значений булева вектора x, используемых для представления
Заметим, что множество всевозможных значений булева вектора x, используемых для представления
Синхронный автомат
Наиболее известной разновидностью последовательностный автоматов является синхронный и асинхронный автоматы.
Синхронный
Синхронный автомат
Наиболее известной разновидностью последовательностный автоматов является синхронный и асинхронный автоматы.
Синхронный
Поведение синхронного автомата рассматривается в дискретном времени , представляющем собою последовательность
Поведение синхронного автомата рассматривается в дискретном времени , представляющем собою последовательность
Пример последовательностного автомата
Как можно упростить решение задачи?
В силовой установке необходимо постоянно
Пример последовательностного автомата
Как можно упростить решение задачи?
В силовой установке необходимо постоянно
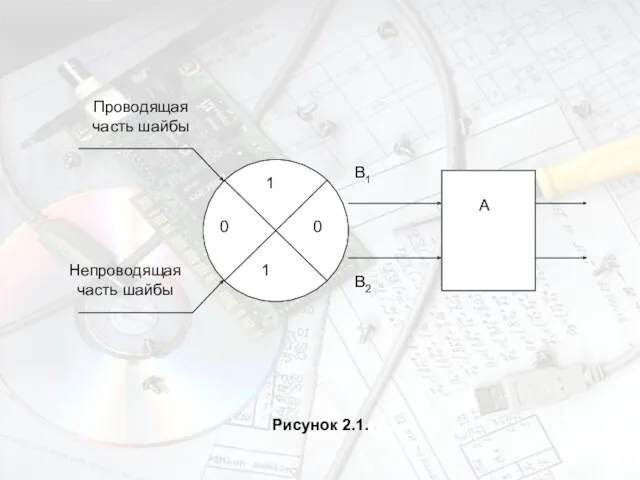
Рисунок 2.1.
Рисунок 2.1.
B1 и B2 – являются входами конструируемого автомата А и принимают
B1 и B2 – являются входами конструируемого автомата А и принимают
Состояния
По состоянию и (новому) входу например ,по (Z1 и a), или
Состояния
По состоянию и (новому) входу например ,по (Z1 и a), или
Следует предполагать, что произошла ошибка и автомат должен порождать выход 1,
Следует предполагать, что произошла ошибка и автомат должен порождать выход 1,
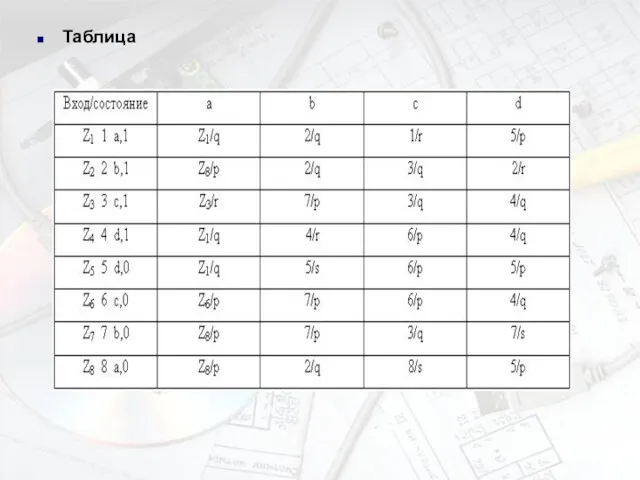
Таблица
Таблица
 Информация и информационные процессы. Тема 2
Информация и информационные процессы. Тема 2 Моделирование в программной среде OpenScad
Моделирование в программной среде OpenScad Высказывания. Логические величины, операции, выражения
Высказывания. Логические величины, операции, выражения Безопасность в Интернете
Безопасность в Интернете ИС оптимизации розничных продаж
ИС оптимизации розничных продаж Основные понятия MS Word
Основные понятия MS Word Процедуры и функции в Паскале
Процедуры и функции в Паскале Языки и системы программирования
Языки и системы программирования Программируемые логические контроллеры Simatic. Инженерная среда Simatic TIA-portal. Step-7 V12 Pro
Программируемые логические контроллеры Simatic. Инженерная среда Simatic TIA-portal. Step-7 V12 Pro Основные понятия и определения информации. Операции обработки информации
Основные понятия и определения информации. Операции обработки информации Интеграция в предмете информатика и ИКТ
Интеграция в предмете информатика и ИКТ Администрирование
Администрирование Нетикет. Правила
Нетикет. Правила Работа с базами данных в языке Python. Тема 5
Работа с базами данных в языке Python. Тема 5 Общие сведения о системах связи. Математические модели сообщений сигналов и помех
Общие сведения о системах связи. Математические модели сообщений сигналов и помех Вычислительная техника и информационные технологии
Вычислительная техника и информационные технологии Выступление на педсовете. Формирование УУД на уроках информатики.
Выступление на педсовете. Формирование УУД на уроках информатики. Компьютерные игры-симуляторы
Компьютерные игры-симуляторы Что такое информатика
Что такое информатика Алгебра. Линейные коды
Алгебра. Линейные коды Компьютерные вирусы
Компьютерные вирусы Влияние бизнес-архитектуры холдинга на его операционную эффективность
Влияние бизнес-архитектуры холдинга на его операционную эффективность Чит-код социальных сетей
Чит-код социальных сетей Конспект урока и презентация 8 класс Системы программирования и ППО по учебнику Босовой После изучения темы учащиеся должны
Конспект урока и презентация 8 класс Системы программирования и ППО по учебнику Босовой После изучения темы учащиеся должны Что такое программирование
Что такое программирование Интернет-этика
Интернет-этика Python 8
Python 8 Знания о системах счисления и двоичном представлении информации в памяти компьютера
Знания о системах счисления и двоичном представлении информации в памяти компьютера