- Теория формальных языков и трансляций. Магазинные автоматы. Глава 5

Содержание
- 2. § 5.1. Неформальное описание В этой главе мы рассмотрим простое устройство — магазинный автомат (pda —
- 3. Магазинный автомат подобен конечному автомату, но в отличие от последнего имеет рабочую память — магазин, в
- 4. Одно движение магазинного автомата состоит в замещении верхнего символа магазина некоторой магазинной цепочкой, в частности, пустой
- 5. Поскольку движение зависит от верхнего символа магазина, то с самого начала в магазине находится один символ
- 6. Каждый конкретный магазинный автомат использует только какой-нибудь один из этих двух признаков приёма входной цепочки. Как
- 7. Входная цепочка считается принятой, если существует хотя бы одна последова-тельность выборов движений, которая приводит автомат к
- 8. В этой главе будет показано, что оба определения приёма эквивалентны в том смысле, что если язык
- 9. Известно, что класс языков, распознаваемых детерминированными МП-автоматами, является строгим под-классом языков, распознаваемых недетер-минированными МП-автоматами. Этим класс
- 10. § 5.2. Формальное определение Определение 5.1. Недетерминированный магазинный автомат есть формальная система M = (Q, Σ,
- 11. Мы будем придерживаться следующей системы обозначений: строчные буквы из начала латинского алфавита — отдельные входные символы;
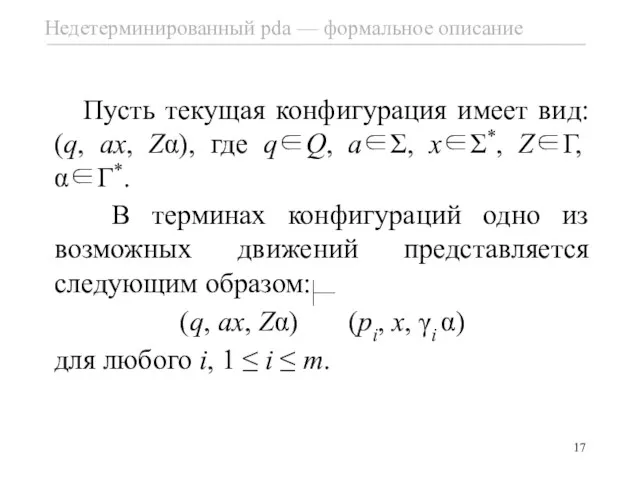
- 12. Определение 5.2. Для описания движений МП-автомата будем использовать понятие конфигурации, под которой будем подразумевать тройку (q,
- 13. Начальная конфигурация есть (q0, x, Z0), где x — вся входная цепочка. Конечная конфигурация определяется по-разному:
- 14. Достижение конечного состояния не означает завершения работы автомата, а сигнализирует лишь о том, что прочитанная к
- 15. (б) Если приём характеризуется опусто-шением магазина, то конечная конфигура-ция есть (q, ε, ε), где q∈Q —
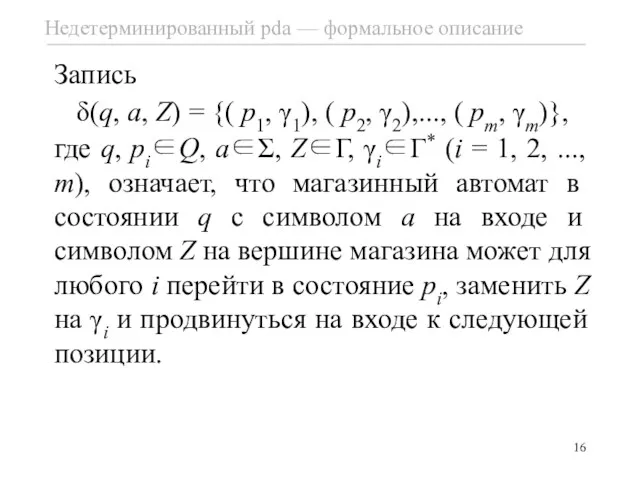
- 16. Запись δ(q, a, Z) = {( p1, γ1), ( p2, γ2),..., ( pm, γm)}, где q,
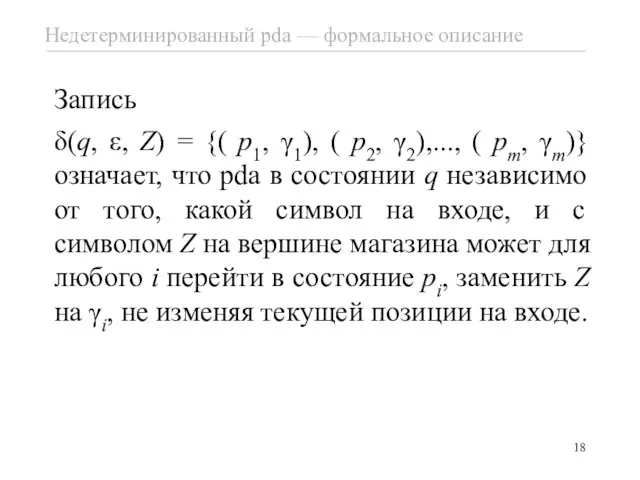
- 18. Запись δ(q, ε, Z) = {( p1, γ1), ( p2, γ2),..., ( pm, γm)} означает, что
- 20. Если γi = ε, то происходит стирание верхнего символа магазина — вершина магазина опускается; если |
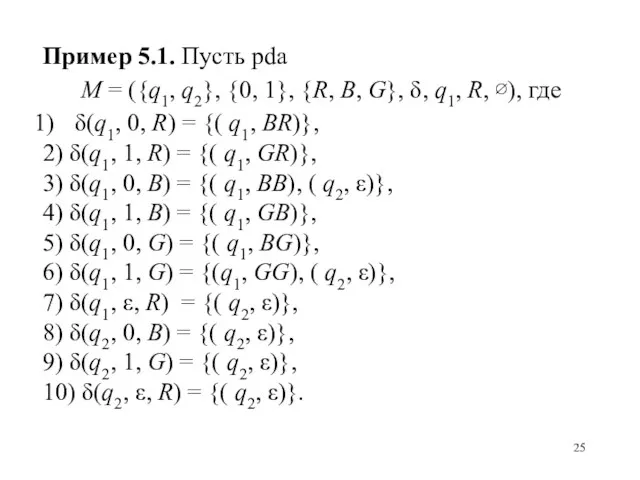
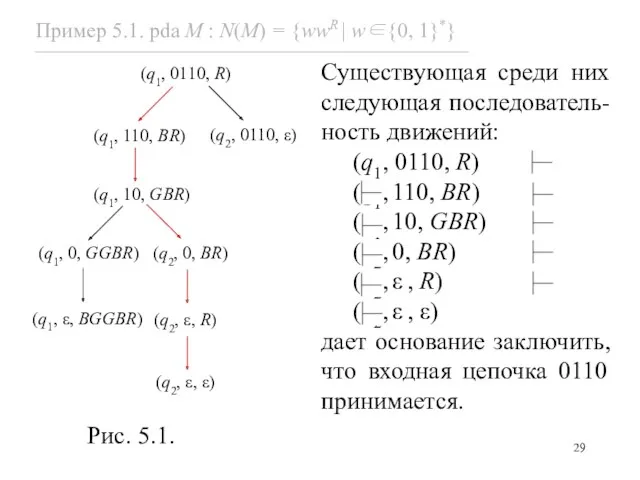
- 25. Пример 5.1. Пусть pda M = ({q1, q2}, {0, 1}, {R, B, G}, δ, q1, R,
- 26. M — недетерминированный магазинный автомат, распознающий язык N(M) = {wwR | w∈{0, 1}*}, где wR обозначает
- 27. При этом правила 3 и 6 предоставляют автомату выбор движений между запоми-нанием очередного входного символа в
- 28. Если на входе находится цепочка вида wwR, то существует такая последователь-ность движений, которая опустошает магазин к
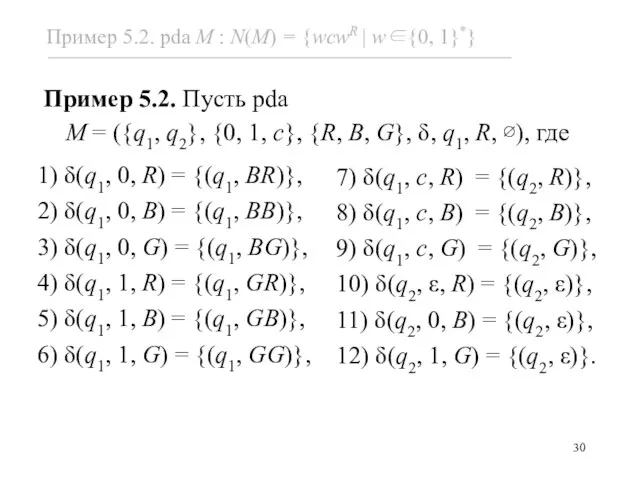
- 30. Пример 5.2. Пусть pda M = ({q1, q2}, {0, 1, c}, {R, B, G}, δ, q1,
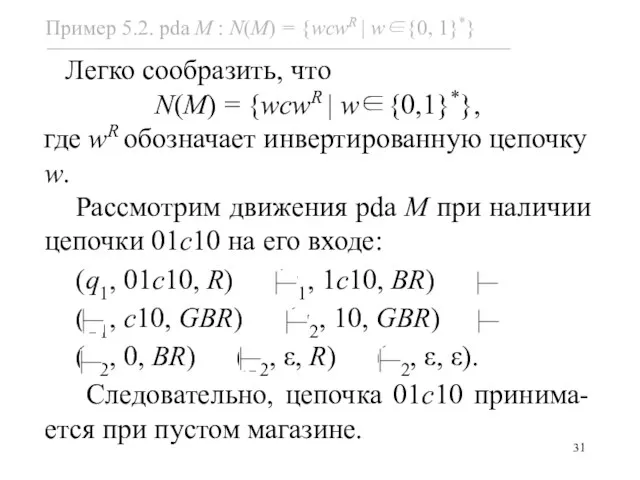
- 32. Заметим, что равенство δ(q2, ε, R) = {(q2, ε)} означает движение, не зависящее от вход-ного символа,
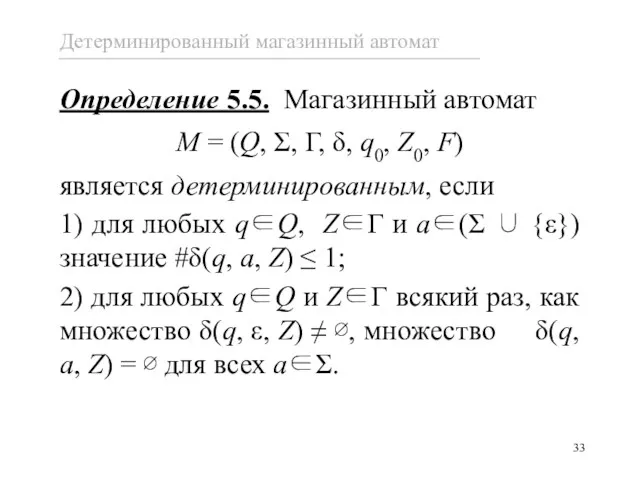
- 33. Определение 5.5. Магазинный автомат M = (Q, Σ, Γ, δ, q0, Z0, F) является детерминированным, если
- 34. Условие 1 означает, что если движение определено, то оно единственно. Условие 2 предотвращает выбор между ε-движением
- 36. Скачать презентацию
§ 5.1. Неформальное описание
В этой главе мы рассмотрим простое устройство
§ 5.1. Неформальное описание
В этой главе мы рассмотрим простое устройство
Магазинный автомат подобен конечному автомату, но в отличие от последнего
Магазинный автомат подобен конечному автомату, но в отличие от последнего
Одно движение магазинного автомата состоит в замещении верхнего символа магазина
Одно движение магазинного автомата состоит в замещении верхнего символа магазина
Поскольку движение зависит от верхнего символа магазина, то с самого
Поскольку движение зависит от верхнего символа магазина, то с самого
Каждый конкретный магазинный автомат использует только какой-нибудь один из этих
Каждый конкретный магазинный автомат использует только какой-нибудь один из этих

Входная цепочка считается принятой, если существует хотя бы одна последова-тельность
Входная цепочка считается принятой, если существует хотя бы одна последова-тельность
В этой главе будет показано, что оба определения приёма эквивалентны
В этой главе будет показано, что оба определения приёма эквивалентны
Известно, что класс языков, распознаваемых детерминированными МП-автоматами, является строгим под-классом
Известно, что класс языков, распознаваемых детерминированными МП-автоматами, является строгим под-классом
§ 5.2. Формальное определение
Определение 5.1. Недетерминированный магазинный автомат есть формальная
§ 5.2. Формальное определение
Определение 5.1. Недетерминированный магазинный автомат есть формальная
Мы будем придерживаться следующей системы обозначений:
строчные буквы из начала
Мы будем придерживаться следующей системы обозначений:
строчные буквы из начала
Определение 5.2. Для описания движений МП-автомата будем использовать понятие конфигурации,
Определение 5.2. Для описания движений МП-автомата будем использовать понятие конфигурации,

Начальная конфигурация есть (q0, x, Z0), где x — вся
Начальная конфигурация есть (q0, x, Z0), где x — вся
Достижение конечного состояния не означает завершения работы автомата, а сигнализирует
Достижение конечного состояния не означает завершения работы автомата, а сигнализирует
(б) Если приём характеризуется опусто-шением магазина, то конечная конфигура-ция есть
(б) Если приём характеризуется опусто-шением магазина, то конечная конфигура-ция есть
Запись
δ(q, a, Z) = {( p1, γ1), ( p2, γ2),...,
Запись
δ(q, a, Z) = {( p1, γ1), ( p2, γ2),...,
Запись
δ(q, ε, Z) = {( p1, γ1), ( p2, γ2),...,
Запись
δ(q, ε, Z) = {( p1, γ1), ( p2, γ2),...,

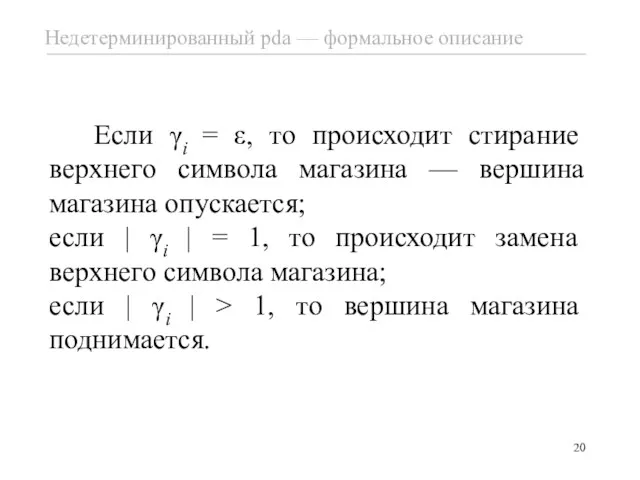
Если γi = ε, то происходит стирание верхнего символа магазина
Если γi = ε, то происходит стирание верхнего символа магазина
Пример 5.1. Пусть pda
M = ({q1, q2}, {0, 1}, {R, B,
Пример 5.1. Пусть pda
M = ({q1, q2}, {0, 1}, {R, B,
M — недетерминированный магазинный автомат, распознающий язык
N(M) = {wwR |
M — недетерминированный магазинный автомат, распознающий язык
N(M) = {wwR |
При этом правила 3 и 6 предоставляют автомату выбор движений
При этом правила 3 и 6 предоставляют автомату выбор движений
Если на входе находится цепочка вида wwR, то существует такая
Если на входе находится цепочка вида wwR, то существует такая
Пример 5.2. Пусть pda
M = ({q1, q2}, {0, 1, c},
Пример 5.2. Пусть pda
M = ({q1, q2}, {0, 1, c},

Заметим, что равенство
δ(q2, ε, R) = {(q2, ε)}
означает
Заметим, что равенство
δ(q2, ε, R) = {(q2, ε)}
означает
Определение 5.5. Магазинный автомат
M = (Q, Σ, Γ, δ, q0,
Определение 5.5. Магазинный автомат
M = (Q, Σ, Γ, δ, q0,
Условие 1 означает, что если движение определено, то оно единственно.
Условие 1 означает, что если движение определено, то оно единственно.
 Урок по теме Организация обмена данными
Урок по теме Организация обмена данными Подпрограммы. Определение функции, фактические и формальные параметры функции
Подпрограммы. Определение функции, фактические и формальные параметры функции Локальные вычислительные сети
Локальные вычислительные сети 3D печать
3D печать Данная и новая информация текста
Данная и новая информация текста Решение вычислительных задач на компьютере (язык С++)
Решение вычислительных задач на компьютере (язык С++) Интернет желілері және телекоммуникациялар
Интернет желілері және телекоммуникациялар Вкладені алгоритмічні структури повторення з передумовою та лічильником
Вкладені алгоритмічні структури повторення з передумовою та лічильником Характеристики языка Java
Характеристики языка Java Компьютерные сети
Компьютерные сети Макет сайта. Бесплатный курс Давняя мечта бизнес-организаторов
Макет сайта. Бесплатный курс Давняя мечта бизнес-организаторов Оператор присваивания, ввод и вывод данных
Оператор присваивания, ввод и вывод данных Хімічна інформатика
Хімічна інформатика Метод координат
Метод координат Ақпараттық жүйелер ұғымы. Ақпараттық жүйелердің құрылымы
Ақпараттық жүйелер ұғымы. Ақпараттық жүйелердің құрылымы Классификация моделей
Классификация моделей Операционная система. Функции операционной системы Windows
Операционная система. Функции операционной системы Windows Сетевая этика. Культура общения в сети
Сетевая этика. Культура общения в сети Задание 3. Медведи представляют бар
Задание 3. Медведи представляют бар Информационные технологии. Введение в ИТ
Информационные технологии. Введение в ИТ Моделирование в среде табличного процессора. Расчёт геометрических параметров объектов.
Моделирование в среде табличного процессора. Расчёт геометрических параметров объектов. Перспективные направления развития базы данных
Перспективные направления развития базы данных G2A
G2A Как выглядит компьютерная программа
Как выглядит компьютерная программа Базы данных. Ресурс для 9 класса
Базы данных. Ресурс для 9 класса Скриншоты для составления отчетов ООО Тилипад
Скриншоты для составления отчетов ООО Тилипад Типы данных АСДП
Типы данных АСДП Машина Тьюринга
Машина Тьюринга