- Универсальная система управления ООО КЕВ-РУС

Содержание
- 2. Универсальная система управления ООО «КЕВ-РУС» Цель: Разработка новых систем управления на базе оборудования KEB для различных
- 3. Универсальная система управления ООО «КЕВ-РУС» Состав системы управления: Панель визуализации Контроллер движения KEB Combicontrol C6 Compact
- 4. Универсальная система управления ООО «КЕВ-РУС» Три универсальных проекта необходимых для построения любых систем управления Визуализация Управление
- 5. Универсальный проект визуализации Создан универсальный проект визуализации позволяющий в максимально короткие сроки и с наименьшими трудозатратами
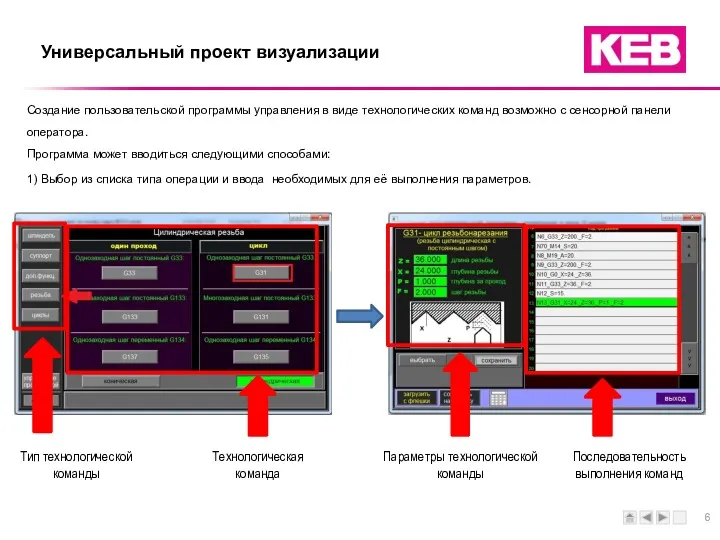
- 6. Универсальный проект визуализации Создание пользовательской программы управления в виде технологических команд возможно с сенсорной панели оператора.
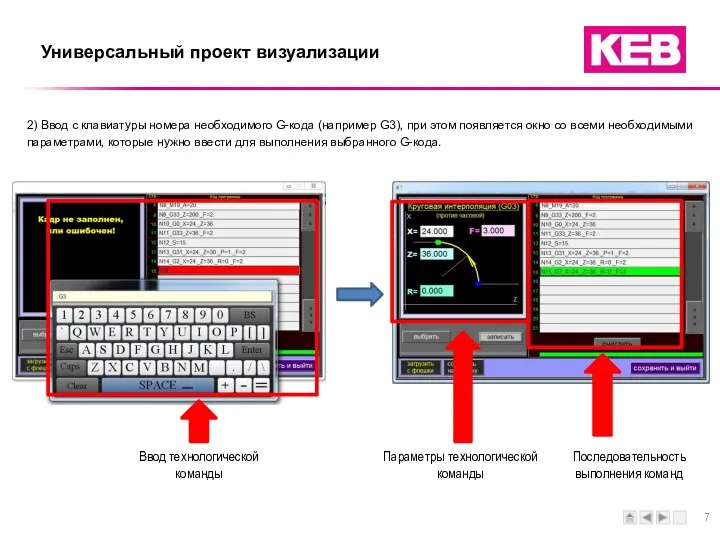
- 7. Универсальный проект визуализации 2) Ввод с клавиатуры номера необходимого G-кода (например G3), при этом появляется окно
- 8. Универсальный проект визуализации Создание пользовательской программы управления в виде технологических команд возможно на ПК. В текстовом
- 9. Универсальный проект управления движением Создан универсальный проект управляющей программы, который может выполняться на любом контроллере движения
- 10. Создан универсальный проект электро-автоматики, с помощью которого оператор может сконфигурировать функции заложенных в систему физических и
- 11. Интерфейс ввода логической программы электро-автоматики. Выбор типа и номера выхода или функции. Универсальный проект электро-автоматики Выбор
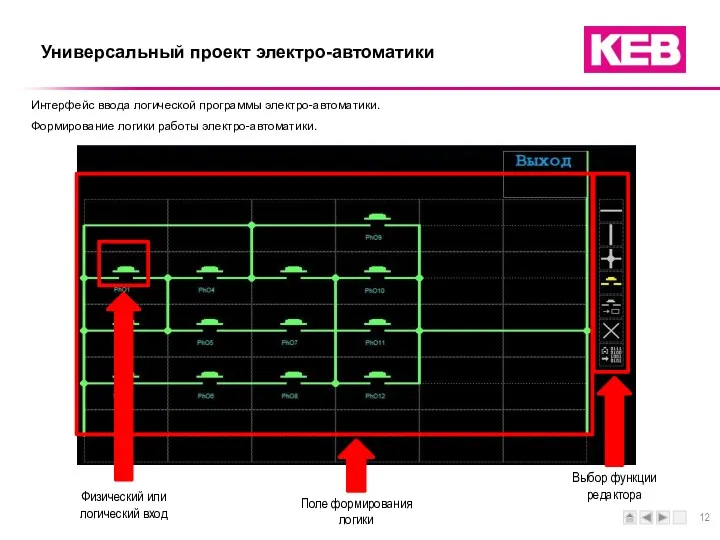
- 12. Универсальный проект электро-автоматики Поле формирования логики Выбор функции редактора Физический или логический вход Интерфейс ввода логической
- 13. Универсальная система управления ООО «КЕВ-РУС» Достоинства универсальной системы управления (для разработчика): Возможность использования системы управления в
- 14. Универсальная система управления ООО «КЕВ-РУС» Достоинства универсальной системы управления (для заказчика): Минимальные сроки разработки и поставки
- 15. Универсальная система управления ООО «КЕВ-РУС» Возможности применения данной системы очень широки. На пример Универсальная Система Управления
- 16. Универсальная система управления ООО «КЕВ-РУС» Функциональная схема рабочего образца системы управления токарным станком ModBus TCP/IP 1
- 17. Универсальная система управления ООО «КЕВ-РУС» Вывод: Низкая себестоимость; Минимальное время подготовки проекта; Система универсальна для широкого
- 19. Скачать презентацию

Универсальная система управления ООО «КЕВ-РУС»
Цель:
Разработка новых систем управления на базе оборудования
Универсальная система управления ООО «КЕВ-РУС»
Цель:
Разработка новых систем управления на базе оборудования

Универсальная система управления ООО «КЕВ-РУС»
Состав системы управления:
Панель визуализации
Контроллер движения KEB
Универсальная система управления ООО «КЕВ-РУС»
Состав системы управления:
Панель визуализации
Контроллер движения KEB

Универсальная система управления ООО «КЕВ-РУС»
Три универсальных проекта необходимых для построения любых
Универсальная система управления ООО «КЕВ-РУС»
Три универсальных проекта необходимых для построения любых

Универсальный проект визуализации
Создан универсальный проект визуализации позволяющий в максимально короткие сроки
Универсальный проект визуализации
Создан универсальный проект визуализации позволяющий в максимально короткие сроки
Универсальный проект визуализации
Создание пользовательской программы управления в виде технологических команд возможно
Универсальный проект визуализации
Создание пользовательской программы управления в виде технологических команд возможно
Универсальный проект визуализации
2) Ввод с клавиатуры номера необходимого G-кода (например G3),
Универсальный проект визуализации
2) Ввод с клавиатуры номера необходимого G-кода (например G3),

Универсальный проект визуализации
Создание пользовательской программы управления в виде технологических команд возможно
Универсальный проект визуализации
Создание пользовательской программы управления в виде технологических команд возможно

Универсальный проект управления движением
Создан универсальный проект управляющей программы, который может выполняться
Универсальный проект управления движением
Создан универсальный проект управляющей программы, который может выполняться

Создан универсальный проект электро-автоматики, с помощью которого оператор
может сконфигурировать функции заложенных
Создан универсальный проект электро-автоматики, с помощью которого оператор
может сконфигурировать функции заложенных

Интерфейс ввода логической программы электро-автоматики.
Выбор типа и номера выхода или функции.
Универсальный
Интерфейс ввода логической программы электро-автоматики.
Выбор типа и номера выхода или функции.
Универсальный
Универсальный проект электро-автоматики
Поле формирования
логики
Выбор функции
редактора
Физический или
логический вход
Интерфейс ввода логической программы электро-автоматики.
Формирование
Универсальный проект электро-автоматики
Поле формирования
логики
Выбор функции
редактора
Физический или
логический вход
Интерфейс ввода логической программы электро-автоматики.
Формирование
Универсальная система управления ООО «КЕВ-РУС»
Достоинства универсальной системы управления (для разработчика):
Возможность использования
Универсальная система управления ООО «КЕВ-РУС»
Достоинства универсальной системы управления (для разработчика):
Возможность использования
Универсальная система управления ООО «КЕВ-РУС»
Достоинства универсальной системы управления (для заказчика):
Минимальные сроки
Универсальная система управления ООО «КЕВ-РУС»
Достоинства универсальной системы управления (для заказчика):
Минимальные сроки
Универсальная система управления ООО «КЕВ-РУС»
Возможности применения данной системы очень широки.
На пример
Универсальная система управления ООО «КЕВ-РУС»
Возможности применения данной системы очень широки.
На пример

Универсальная система управления ООО «КЕВ-РУС»
Функциональная схема рабочего образца системы управления токарным
Универсальная система управления ООО «КЕВ-РУС»
Функциональная схема рабочего образца системы управления токарным
Универсальная система управления ООО «КЕВ-РУС»
Вывод:
Низкая себестоимость;
Минимальное время подготовки проекта;
Система универсальна для
Универсальная система управления ООО «КЕВ-РУС»
Вывод:
Низкая себестоимость;
Минимальное время подготовки проекта;
Система универсальна для
 Средства мультимедиа
Средства мультимедиа Система AutoCAD. Общая характеристика и функциональные возможности. (Лекция 5)
Система AutoCAD. Общая характеристика и функциональные возможности. (Лекция 5) Технология программирования (ТП)
Технология программирования (ТП) Windows Xp. История разработки
Windows Xp. История разработки Решение проблемы выпуска студентов
Решение проблемы выпуска студентов Работа с текстовыми и типизированными файлами
Работа с текстовыми и типизированными файлами Публикация статей в журналах
Публикация статей в журналах Понятие о мультимедиа технологиях. Создание компьютерной презентации
Понятие о мультимедиа технологиях. Создание компьютерной презентации Прикладной уровень и протоколы
Прикладной уровень и протоколы Тестирование программного обеспечения (Software Testing)
Тестирование программного обеспечения (Software Testing) Онтологические модели представления знаний
Онтологические модели представления знаний 2015 год глазами Facebook Community
2015 год глазами Facebook Community Создание Telegram-бота
Создание Telegram-бота Презентация к уроку на тему Архиваторы
Презентация к уроку на тему Архиваторы Алан Тьюринг. Расшифровка Энигмы
Алан Тьюринг. Расшифровка Энигмы Анимация
Анимация Возможности динамических (электронных) таблиц. Математическая обработка числовых данных
Возможности динамических (электронных) таблиц. Математическая обработка числовых данных Технология Wi-Fi
Технология Wi-Fi Безопасность детей в сети интернет
Безопасность детей в сети интернет Порядок подачи заявления на изготовление сертификата электронной подписи на портале Удостоверяющего центра
Порядок подачи заявления на изготовление сертификата электронной подписи на портале Удостоверяющего центра GitHub - найбільший веб-сервіс для хостингу IT-проектів і їх спільної розробки
GitHub - найбільший веб-сервіс для хостингу IT-проектів і їх спільної розробки Розгортання функції якості
Розгортання функції якості Оператори циклів (урок 29)
Оператори циклів (урок 29) Знакомство с OpenGL
Знакомство с OpenGL Теория автоматов. (Лекция 11)
Теория автоматов. (Лекция 11)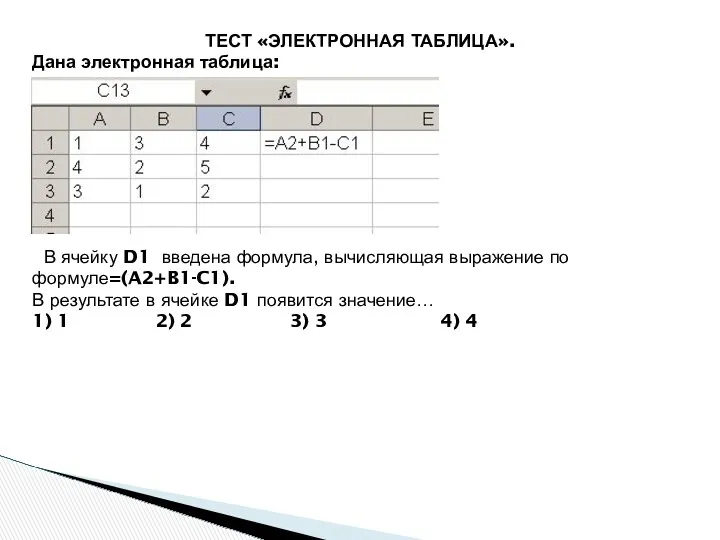 Тест Электронная таблица. Абсолютная и относительная адресация. Понятие диапазона. Встроенные функции
Тест Электронная таблица. Абсолютная и относительная адресация. Понятие диапазона. Встроенные функции 3D-ручка. Как появилась 3D-ручка
3D-ручка. Как появилась 3D-ручка Проблемы информатизации
Проблемы информатизации