- Управление в автоматизированном производстве (01)

Содержание
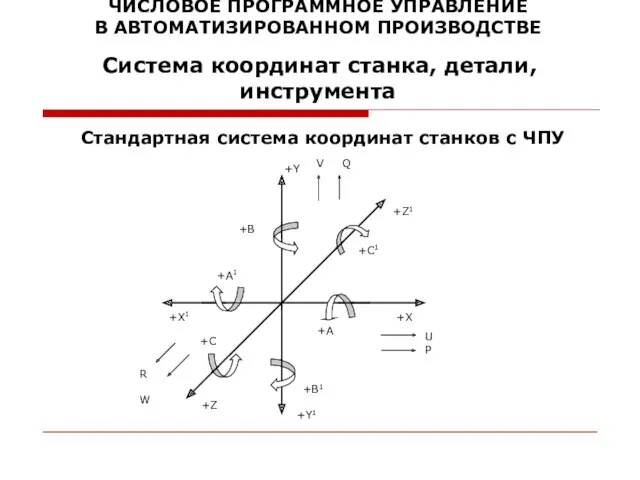
- 2. ЧИСЛОВОЕ ПРОГРАММНОЕ УПРАВЛЕНИЕ В АВТОМАТИЗИРОВАННОМ ПРОИЗВОДСТВЕ Система координат станка, детали, инструмента Стандартная система координат станков с
- 3. Система координат станка, детали, инструмента Размещение координатных систем у различных станков с ЧПУ
- 4. Система координат станка, детали, инструмента Система координат станка и детали
- 5. Система координат станка, детали, инструмента Система координат инструмента
- 6. Система координат станка, детали, инструмента Связь систем координат
- 7. Система координат станка, детали, инструмента Связь систем координат при обработке на токарном станке
- 8. Связь систем координат при обработке на токарном станке Для случая, когда оси аппликат систем координат программы
- 10. Скачать презентацию
ЧИСЛОВОЕ ПРОГРАММНОЕ УПРАВЛЕНИЕ
В АВТОМАТИЗИРОВАННОМ ПРОИЗВОДСТВЕ
Система координат станка, детали, инструмента
Стандартная
ЧИСЛОВОЕ ПРОГРАММНОЕ УПРАВЛЕНИЕ
В АВТОМАТИЗИРОВАННОМ ПРОИЗВОДСТВЕ
Система координат станка, детали, инструмента
Стандартная

Система координат станка, детали, инструмента
Размещение координатных систем у различных станков с
Система координат станка, детали, инструмента
Размещение координатных систем у различных станков с

Система координат станка, детали, инструмента
Система координат станка и детали
Система координат станка, детали, инструмента
Система координат станка и детали

Система координат станка, детали, инструмента
Система координат инструмента
Система координат станка, детали, инструмента
Система координат инструмента

Система координат станка, детали, инструмента
Связь систем координат
Система координат станка, детали, инструмента
Связь систем координат

Система координат станка, детали, инструмента
Связь систем координат при обработке на токарном
Система координат станка, детали, инструмента
Связь систем координат при обработке на токарном
Связь систем координат при обработке на токарном станке
Для случая, когда оси
Связь систем координат при обработке на токарном станке
Для случая, когда оси
 Требования к современным операционным системам (ОС). Функциональные компоненты ОС автономного компьютера
Требования к современным операционным системам (ОС). Функциональные компоненты ОС автономного компьютера Паралельні обчислення на суперкомп’ютері СКІТ
Паралельні обчислення на суперкомп’ютері СКІТ Многообразие схем. Информационные модели на графах. Использование графов при решении задач
Многообразие схем. Информационные модели на графах. Использование графов при решении задач Основы программирования ФИСТ. Двухмерные массивы. Базовые алгоритмы. Лекция 10
Основы программирования ФИСТ. Двухмерные массивы. Базовые алгоритмы. Лекция 10 Возможности и риски информационной среды
Возможности и риски информационной среды Мобильный агент
Мобильный агент Использование информационных технологий для развития познавательного интереса на уроках русского языка и литературы
Использование информационных технологий для развития познавательного интереса на уроках русского языка и литературы Технологии баз данных
Технологии баз данных Высокоуровневые методы информатики и программирования
Высокоуровневые методы информатики и программирования Представление информации, языки, кодирование. История технических способов кодирования
Представление информации, языки, кодирование. История технических способов кодирования Защита информации
Защита информации Одномерные массивы. Алгоритмы циклического сдвига, сжатия.
Одномерные массивы. Алгоритмы циклического сдвига, сжатия. Масштабируемая веб-архитектура и распределенные системы
Масштабируемая веб-архитектура и распределенные системы Устройство компьютера
Устройство компьютера Система программирования PascalABC.NET и электронный задачник Programming Taskbook
Система программирования PascalABC.NET и электронный задачник Programming Taskbook Презентация Структура данных
Презентация Структура данных Базы и банки данных. История развития ВТ и СУБД
Базы и банки данных. История развития ВТ и СУБД Введение в математическую логику
Введение в математическую логику Инструкция по административной панели Momentum
Инструкция по административной панели Momentum Веб-система. Электронное расписание занятий
Веб-система. Электронное расписание занятий Разбор киберспортивной жизни на примере игры League of Legends
Разбор киберспортивной жизни на примере игры League of Legends Этапы развития информационного общества. Развитие технических средств и информационных ресурсов (2)
Этапы развития информационного общества. Развитие технических средств и информационных ресурсов (2) IT - технологии в футболе
IT - технологии в футболе Обзор оборудования и программного обеспечения компании VIPA
Обзор оборудования и программного обеспечения компании VIPA Электронная гимнастика для глаз
Электронная гимнастика для глаз Партицирование данных. Урок 4
Партицирование данных. Урок 4 Сетевые экраны
Сетевые экраны Организация и инструментальные средства информационных технологий управления
Организация и инструментальные средства информационных технологий управления