- Обзор оборудования и программного обеспечения компании VIPA

Содержание
- 2. Вопросы лекции Состав программных и аппаратных средств VIPA модули ЦПУ и модули расширения СПО для программирования
- 3. ПО МПС и ПЛК (примеры) WinPLC7 – интегрированная среда разработки от VIPA соответствует МЭК_61131-3 полностью совместима
- 4. СПО WinPLC7 v.4 является связующим звеном между пользователем и всеми ПЛК производства VIPA семейства System 100V,
- 5. Интегрированная среда разработки Главное меню и панель инструментов Каталог Область определения переменных Менеджер объектов Редактор Меню
- 6. Компоненты VIPA … Система System100V компактная система управления для ЦСУ и РСУ ЦПУ на борту сигнальные
- 7. Компоненты VIPA … Система System200V расширяемая система управления для ЦСУ и РСУ ЦПУ контактные модули модули
- 8. Компоненты VIPA … Система System300S высокоскоростная расширяемая система управления для ЦСУ и РСУ c внутренней SPEED-шиной
- 9. Компоненты VIPA … Система System500S высокоскоростная система управления для ЦСУ и РСУ c внутренней SPEED-шиной, встраиваемая
- 10. Конфигурирование ПЛК VIPA Субмодули каналов ввода/вывода ПЛК распределены следующим образом 1 – субмодуль типа DI 8xDC24V
- 11. Конфигурация ПЛК VIPA
- 12. Конфигурация ПЛК VIPA
- 13. Ресурсы ПЛК … АДРЕСА символьные абсолютные
- 14. Создание программы… Создать проект Открыть ОВ1 Создать символьную таблицу
- 15. активируйте ФБ и заполните таблицу объявления переменных выберите левой части тип переменных “IN”,”OUT”, “IN_OUT” или “STAT”
- 16. Локальные переменные блока отмечаются знаком # и действительны только в этом блоке Глобальные переменные появляются в
- 17. Блок данных
- 18. Глобальный блок данных Данные в глобальных блоках данных доступны всем остальным блокам
- 19. Ресурсы СПО… Проект – это совокупность программных компонентов, ресурсов и данных, которая является прикладным ПО для
- 20. Переменная типа S5TIME используется для установки таймеров системы SIMATIC время устанавливается в часах (hours), минутах (minutes),
- 21. Доступны следующие таймеры в виде блочных элементов S_IMPULS (SI) – задание параметров и запуск таймера «Импульс»
- 22. в виде катушек —(SI) – катушка таймера «Импульс» —(SV) – катушка таймера «Удлиненный импульс» —(SE) –
- 23. Таймеры…
- 24. Запуск таймера… Таймер стартует, если RLO меняется на входе запуска (start input) или перед катушкой /
- 25. Определение интервала времени... Таймер в качестве длительности принимает значение, указанное под катушкой /блочным элементом, или значение
- 26. IEC-таймеры … встроены в операционную систему CPU как системные функциональные блоки (блоки SFB) SFB 3 TP
- 27. Счетчики (counters) … используют CPU в вычислительных задачах для счета по возрастанию (прямой счет) по убыванию
- 28. Представление счетчика … в виде блочного элемента
- 29. Представление счетчика … в виде отдельных элементов
- 30. Определение значения счета счетчика Определение значения счета как константы C#100 Значение счета 100 W#16#0100 Значение счета
- 31. IEC-счетчики … встроены в операционную систему CPU в качестве системных функциональных блоков (блоки SFB) SFB 0
- 32. Програмне забезпечення мікропроцесорних систем Лекция 12 Реализация управления в WinPLC7 Лысаченко И.Г. 2012 Національний технічний університет
- 33. Вопросы лекции Опрос специфических сигналов дискретными входами фиксация коротких импульсов (alarm) аппаратные счетчики (HSC) Управление дискретными
- 34. Распознавание импульсов ПЛК могут распознавать короткие импульсы на некоторых цифровых входах так как CPU считывает цифровые
- 35. Скоростные счетчики Скоростные счетчики (HSC) считают происходящие с высокой скоростью события, которые не могут контролироваться программно
- 36. Входы/выходы ПЛК VIPA System100 4 входа на X3 могут использоваться в качестве счетчика импульсов 2 выхода
- 37. Пример конфигурирования счетчика Вызов окна настройки специальной конфигурации ПЛК (входы/выходы)
- 38. Счетчик импульсов использует один вход с возможностью настройки направления счета (максимум 4 счетчика) Счетчик импульсов с
- 39. Конфигурирование входов/выходов 136...139 Counter 0 адрес счетчика №1 ID136 (4 байта) – адрес в ОЗУ ПЛК
- 40. Адресация скоростных счетчиков для доступа к счетному значению скоростного счетчика указывается адрес этого счетчика с помощью
- 41. Модуль SFC 224… Функции высокоскоростного счетчика реализованы при помощи встроенного стандартного модуля в CPU VIPA
- 42. Модуль SFC 224… канал номер канала активируемого счетчика (0…3) доступ активирует и деактивирует счетчик (true, false)
- 43. Модуль SFC 224… предел при достижении значения при счете вверх или вниз счетчик устанавливается в ноль
- 44. Управление дискретными выходами могут работать в режиме ШИМ (PWM) с максимальной частотой следования импульсов до 50kHz
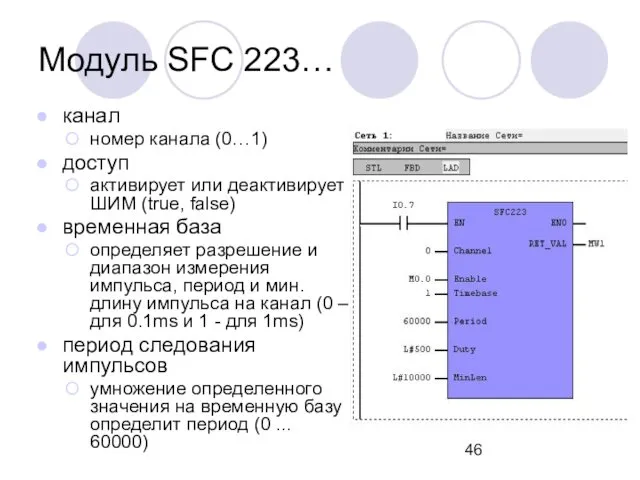
- 45. Модуль SFC 223… Функции ШИМ-регулятора реализованы при помощи встроенного стандартного модуля в CPU VIPA
- 46. Модуль SFC 223… канал номер канала (0…1) доступ активирует или деактивирует ШИМ (true, false) временная база
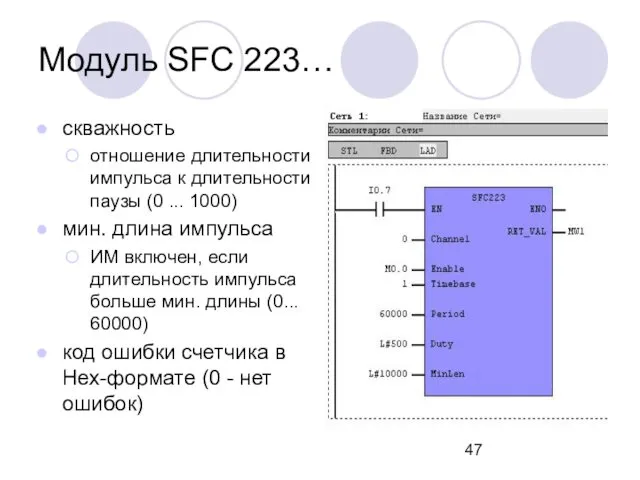
- 47. Модуль SFC 223… скважность отношение длительности импульса к длительности паузы (0 ... 1000) мин. длина импульса
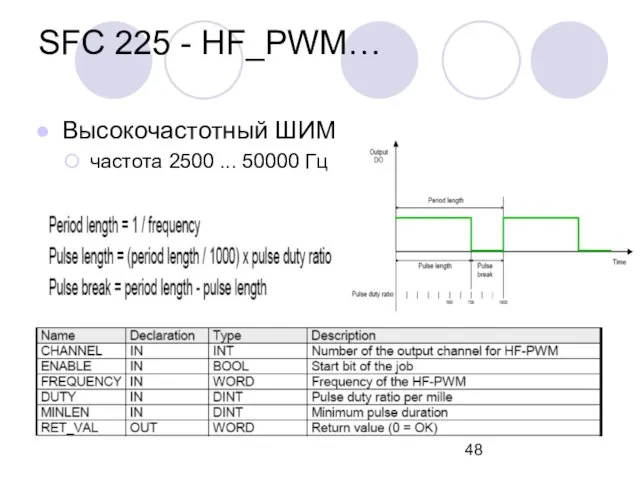
- 48. SFC 225 - HF_PWM… Высокочастотный ШИМ частота 2500 ... 50000 Гц
- 49. Выводы по лекции Регулирование осуществляется либо аппаратно, либо программно при помощи функциональных модулей При создании проекта
- 50. Програмне забезпечення мікропроцесорних систем Лекция 13 Реализация регулирования в WinPLC7 Лысаченко И.Г. 2012 Національний технічний університет
- 51. Вопросы лекции Классификация аналоговых модулей Опрос аналоговых датчиков Управление аналоговыми выходами
- 52. Конфигурирование аналоговых модулей
- 53. Модули ввода аналоговых сигналов Общая характеристика модулей ввода аналоговых сигналов по количеству входов – 4 или
- 54. Подключение активных датчиков (преобразователей) 2-х проводная схема 4-х проводная схема необходим БП для активного датчика (преобразователя)
- 55. Подключение термометров сопротивления и резистивных датчиков 2-х проводная схема 3-х проводная схема 4-х проводная схема Очень
- 56. Модули вывода аналоговых сигналов Общая характеристика модулей вывода аналоговых сигналов по количеству выходов – 4 по
- 57. Модули ввода/вывода аналоговых сигналов и спец. модули Комбинированные параметризуются в программе конфигурации
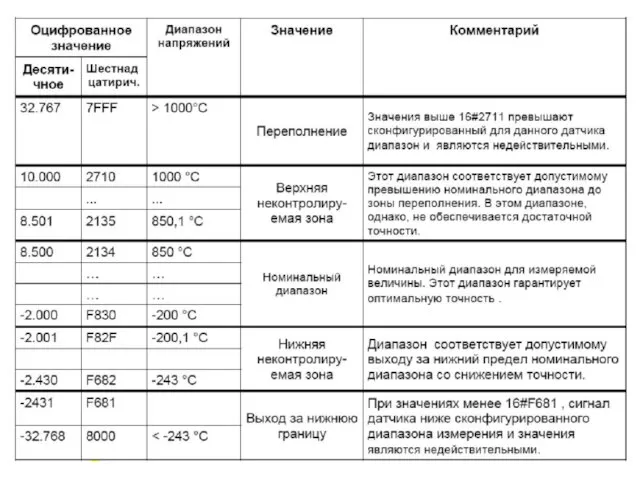
- 58. Формат S7 – составной значение числа в битах 4 - 14 знак параметра в 15 бите
- 59. Формулы пересчета…
- 60. Формат S7 – составной значение числа в битах 4 – 14, 5 – 14, 6 –
- 61. Примеры… Измерение температуры термометр ТСП-100 канал ch3 (в программе конфигуратора) Измерение силы тока датчик давления с
- 62. Настройки аналогового модуля включение функции ”диагностического прерывания” вызывает OB86 при отсутствии заземления при отсутствии напряжения питания
- 63. Пользовательская программа Исходные данные входные величины (значения, считанные с входных каналов) сохраняются в словах блока данных
- 64. Элементы программы циклическое сохранение значений аналоговых входов в блоке данных (DB1) циклическое преобразование аналоговых входных величин
- 65. Этапы работы программы Аналоговый входной модуль (АЦП) преобразует аналоговые сигналы процесса в цифровой формат («сырые измерения»)
- 66. Обработка аналоговых сигналов преобразование кода (К), полученного АЦП модуля аналогового ввода, в значение параметра в физических
- 69. Диагностика работы модуля Программа пользователя реагирует на ошибки аппаратной части модуль должен иметь диагностические функции для
- 70. Диагностика работы каналов ошибка конфигурирования или параметрирования общая ошибка ошибка подключения питания обрыв провода при обрыве
- 71. Алгоритм программы пользователя
- 72. Блок ОВ1 (вызов функции)
- 73. Функция преобразования (FC1) параметры функции определяют значение физической величины масштабирование
- 74. Блоки данных (акт. и физ.)
- 75. Встроенные функции
- 76. Выводы по лекции Обработка аналоговых сигналов сопряжена с дополнительными операциями над текущим значением актуального параметра для
- 77. Програмне забезпечення мікропроцесорних систем Лекция 14 Разработка ПИД-регулятора в WinPLC7 Лысаченко И.Г. 2012 Національний технічний університет
- 78. Вопросы лекции ПИД-регулятор ступенчатый ПИД-регулятор непрерывный применение встроенного генератора импульсов в ПИД-регуляторах
- 79. Постановка задачи Необходимо разработать программу для ПИД-регулятора в проекте предусмотреть возможность подключения модели объекта управления и
- 80. Объект регулирования
- 81. Ступенчатый регулятор с имитацией объекта управления реализуется с помощью системного функционального блока (SFB42) CONT_S для параметризации
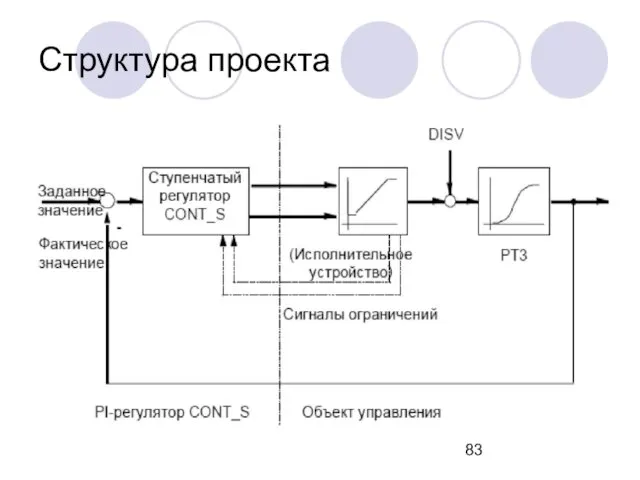
- 82. Структура проекта Проект состоит в основном из двух ФБ CONT_S и PROC_S. CONT_S выполняет роль ступенчатого
- 83. Структура проекта
- 84. Структура и параметры блока PROC_S ФБ PROC_S моделирует работу ОУ схема ОУ - последовательное соединение интегрирующего
- 85. Блочная структура проекта блок перезапуска OB100 перезапускает ПЛК и устанавливает переменную процесса в начальное состояние (0.0)
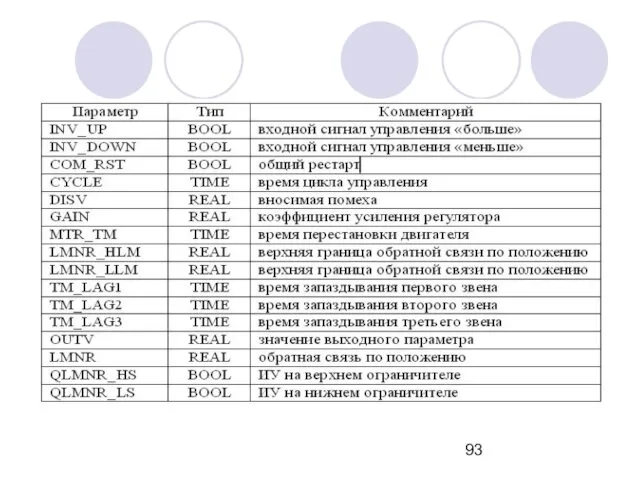
- 86. Параметры регулятора
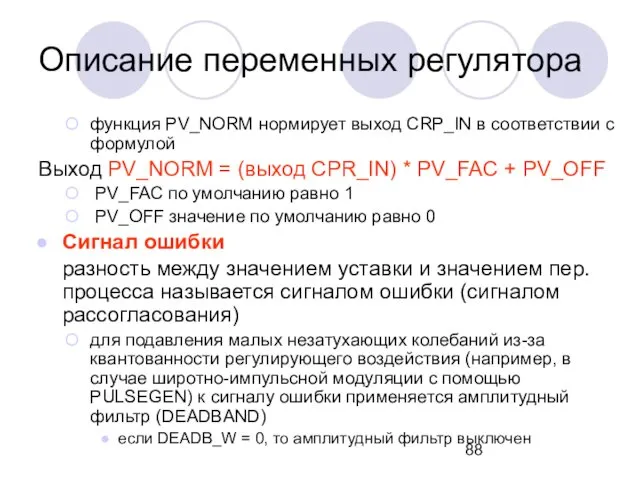
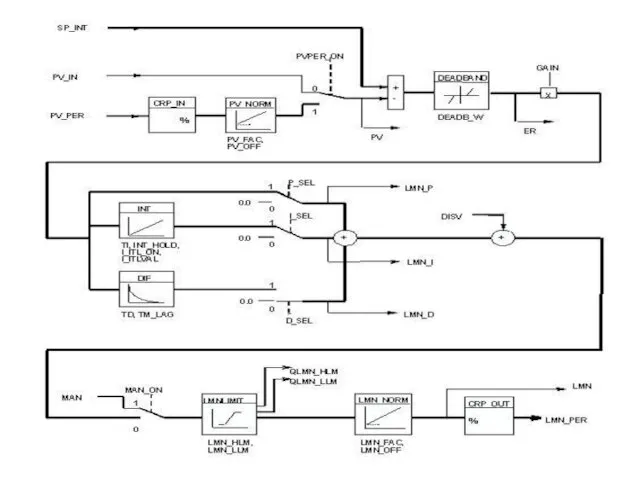
- 87. Описание переменных регулятора Задание вводится на входе SP_INT в формате числа с плавающей точкой Переменная процесса
- 88. функция PV_NORM нормирует выход CRP_IN в соответствии с формулой Выход PV_NORM = (выход CPR_IN) * PV_FAC
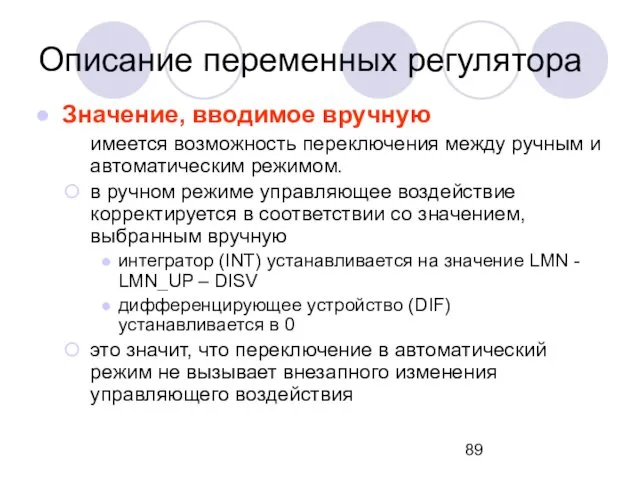
- 89. Значение, вводимое вручную имеется возможность переключения между ручным и автоматическим режимом. в ручном режиме управляющее воздействие
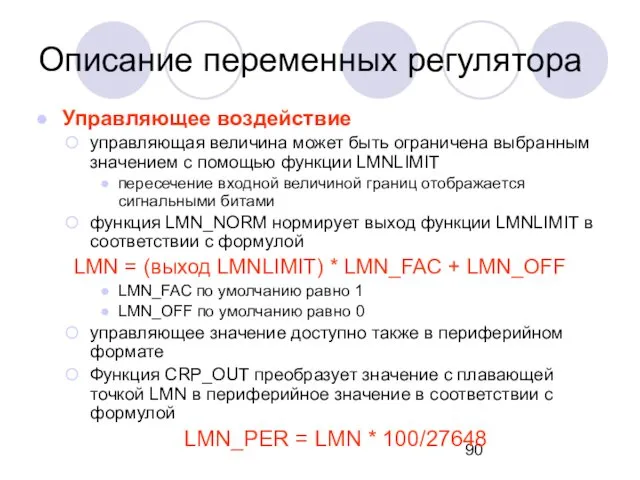
- 90. Управляющее воздействие управляющая величина может быть ограничена выбранным значением с помощью функции LMNLIMIT пересечение входной величиной
- 92. Фрагменты кода блока… Istwert:=INT_TO_REAL(WORD_TO_INT(PV_PER)) * 100.0 / 27648.0; // Получили входную переменную от периферии (0-27648 в
- 94. Передаточная функция процесса
- 95. Блок модели объекта
- 96. Взаимосвязь блоков проекта
- 97. Значение параметров блоков
- 98. Организационные блоки необходимо настроить ОВ1 ОВ35 в блоке две сети, которые по прерыванию вызывают блоки SFB42
- 99. Блок ОВ35
- 100. Блок ОВ100 по прерыванию полный рестарт ПЛК формирование сигнала перезапуска COM_RST по сигналу переменной «LMNS_ON» из
- 101. Непрерывный ПИД-регулятор Реализуется с помощью системного функционального блока (SFB41) CONT_С для параметризации работы блока в конфигураторе
- 103. Пример фрагмента кода блока
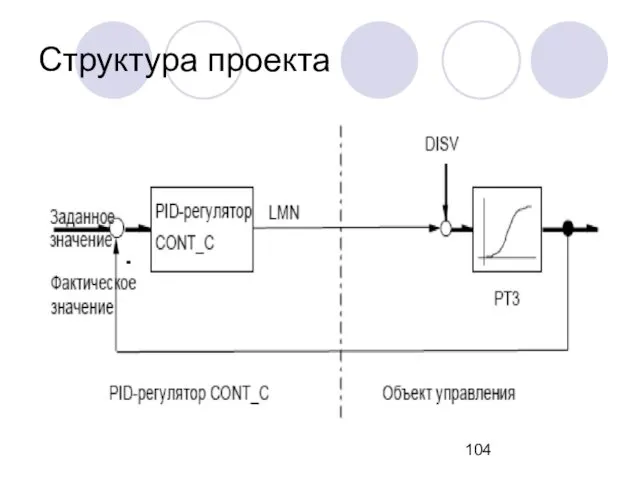
- 104. Структура проекта
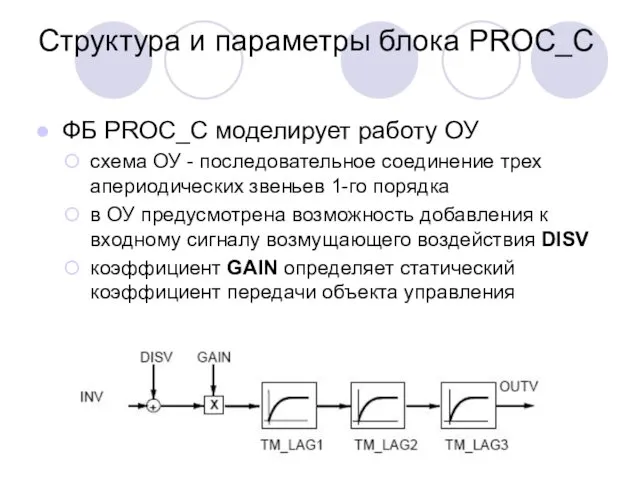
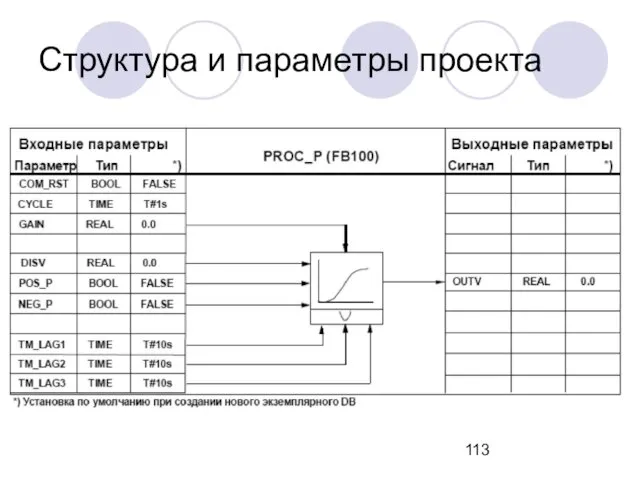
- 105. Структура и параметры блока PROC_С ФБ PROC_С моделирует работу ОУ схема ОУ - последовательное соединение трех
- 106. Параметры и структура блока PROC_C
- 107. Взаимосвязь блоков проекта
- 108. Значение параметров блоков
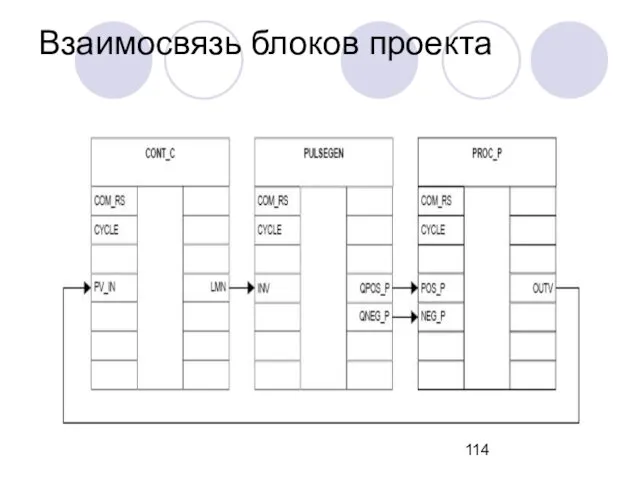
- 109. Применение блока генератора импульса (SFB43) Непрерывный регулятор CONT_C с последовательно включенным формирователем импульсов PULSEGEN и имитацией
- 110. Структура проекта PID-Regler CONT_C mit Impulsformer PULSGEN - PID-регулятор CONT_C с формирователем импульсов PULSGEN Sollwert –
- 111. Структура модели объекта
- 112. Структура и параметры проекта функциональный блок PULS_CTR блоки для регулятора CONT_C и генератора PULSEGEN блок имитируемого
- 113. Структура и параметры проекта
- 114. Взаимосвязь блоков проекта
- 116. Скачать презентацию
Вопросы лекции
Состав программных и аппаратных средств VIPA
модули ЦПУ и модули
Вопросы лекции
Состав программных и аппаратных средств VIPA
модули ЦПУ и модули
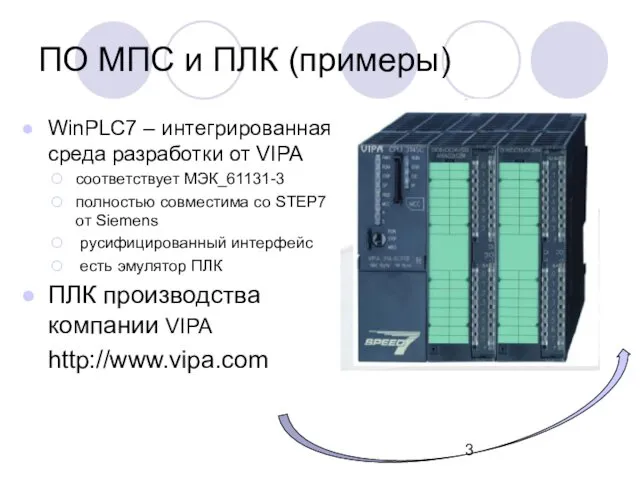
ПО МПС и ПЛК (примеры)
WinPLC7 – интегрированная среда разработки от VIPA
соответствует
ПО МПС и ПЛК (примеры)
WinPLC7 – интегрированная среда разработки от VIPA
соответствует
СПО WinPLC7 v.4
является связующим звеном между пользователем и всеми ПЛК производства
СПО WinPLC7 v.4
является связующим звеном между пользователем и всеми ПЛК производства
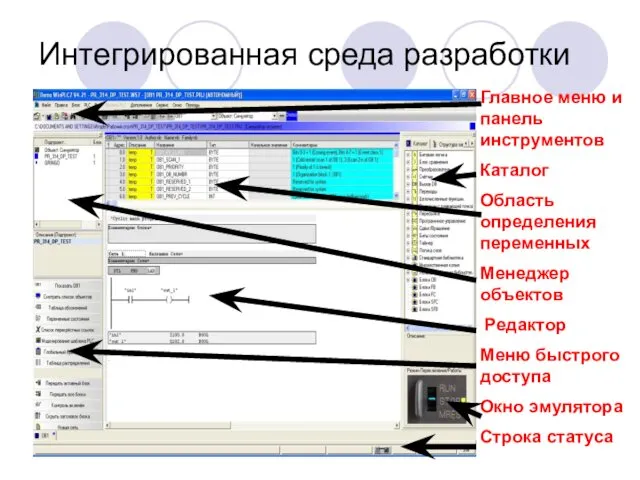
Интегрированная среда разработки
Главное меню и панель инструментов
Каталог
Область определения переменных
Менеджер объектов
Интегрированная среда разработки
Главное меню и панель инструментов
Каталог
Область определения переменных
Менеджер объектов
Компоненты VIPA …
Система System100V
компактная система управления для ЦСУ и РСУ
Компоненты VIPA …
Система System100V
компактная система управления для ЦСУ и РСУ
Компоненты VIPA …
Система System200V
расширяемая система управления для ЦСУ и РСУ
Компоненты VIPA …
Система System200V
расширяемая система управления для ЦСУ и РСУ
Компоненты VIPA …
Система System300S
высокоскоростная расширяемая система управления для ЦСУ и РСУ
Компоненты VIPA …
Система System300S
высокоскоростная расширяемая система управления для ЦСУ и РСУ
Компоненты VIPA …
Система System500S
высокоскоростная система управления для ЦСУ и РСУ c
Компоненты VIPA …
Система System500S
высокоскоростная система управления для ЦСУ и РСУ c
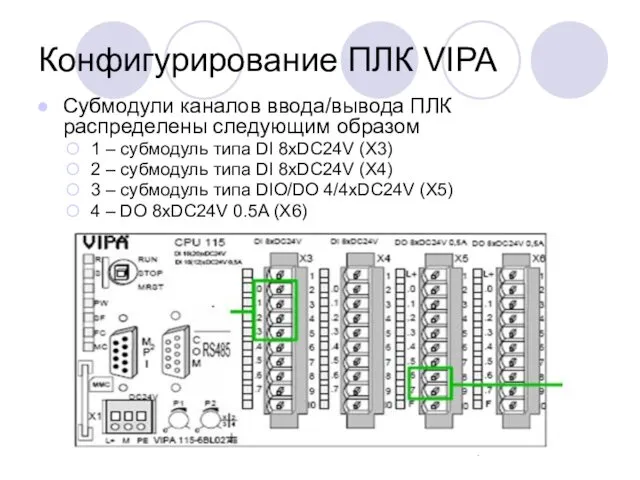
Конфигурирование ПЛК VIPA
Субмодули каналов ввода/вывода ПЛК распределены следующим образом
1 – субмодуль
Конфигурирование ПЛК VIPA
Субмодули каналов ввода/вывода ПЛК распределены следующим образом
1 – субмодуль
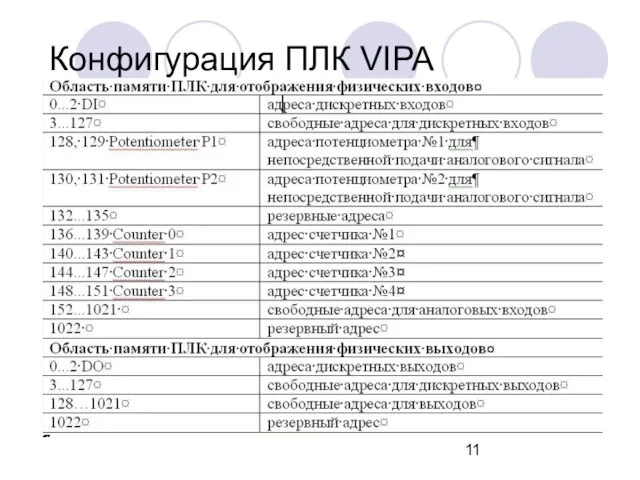
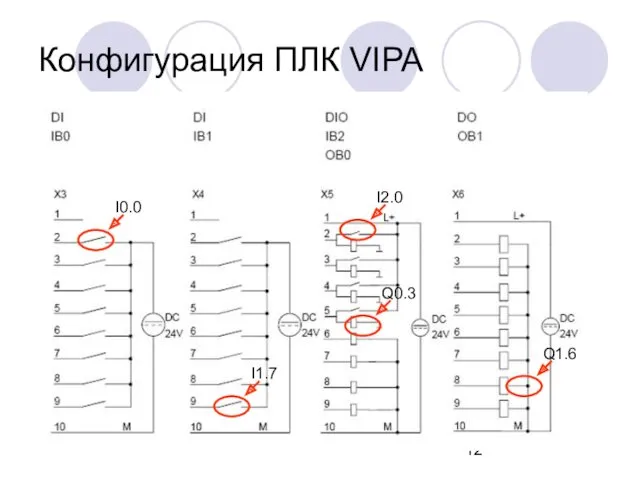
Конфигурация ПЛК VIPA
Конфигурация ПЛК VIPA
Конфигурация ПЛК VIPA
Конфигурация ПЛК VIPA
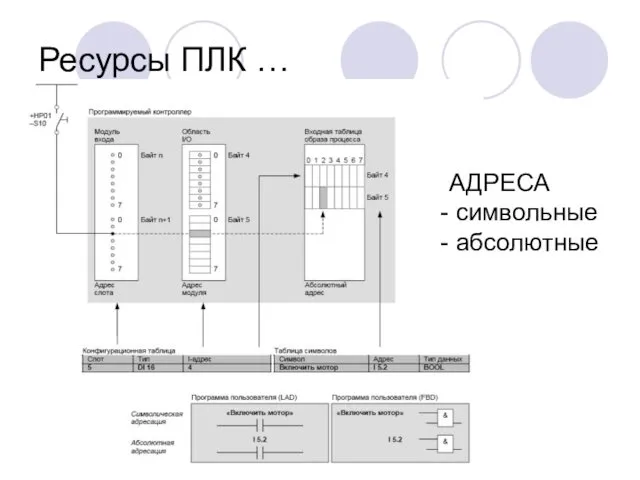
Ресурсы ПЛК …
АДРЕСА
символьные
абсолютные
Ресурсы ПЛК …
АДРЕСА
символьные
абсолютные
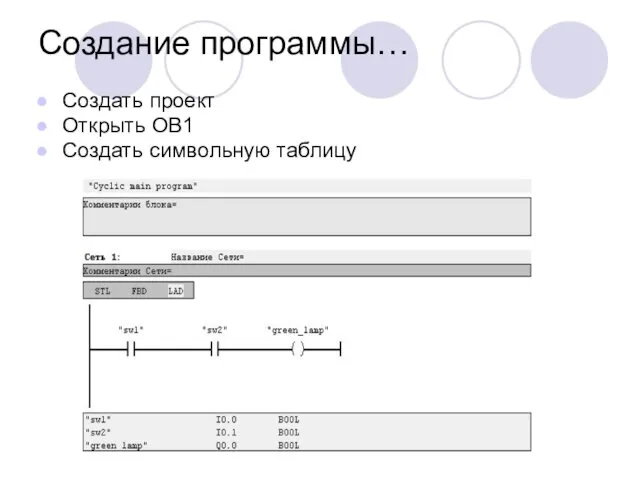
Создание программы…
Создать проект
Открыть ОВ1
Создать символьную таблицу
Создание программы…
Создать проект
Открыть ОВ1
Создать символьную таблицу
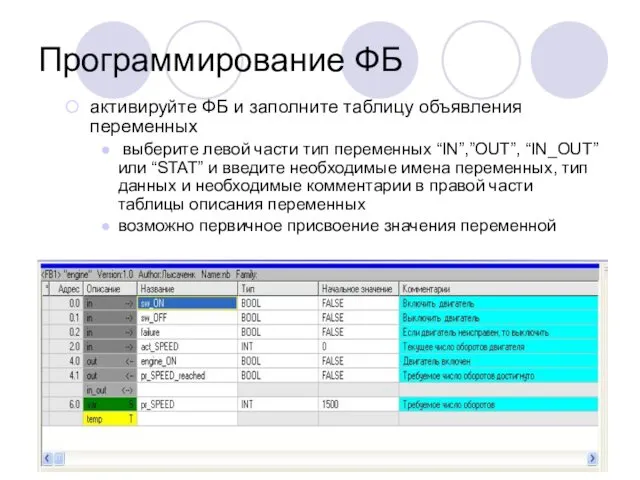
активируйте ФБ и заполните таблицу объявления переменных
выберите левой части тип
активируйте ФБ и заполните таблицу объявления переменных
выберите левой части тип
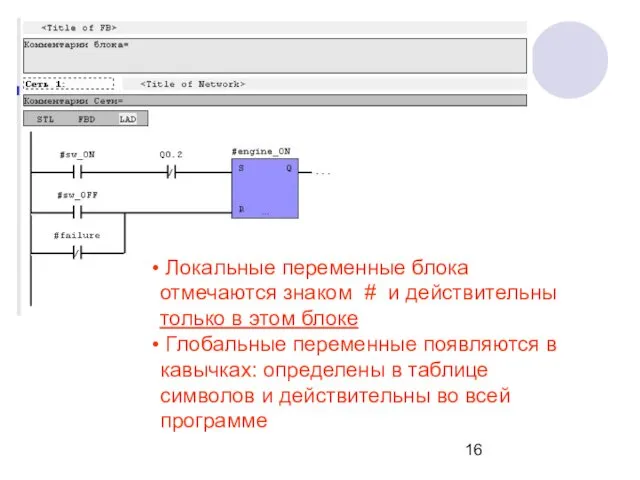
Локальные переменные блока отмечаются знаком # и действительны
только в этом
Локальные переменные блока отмечаются знаком # и действительны
только в этом
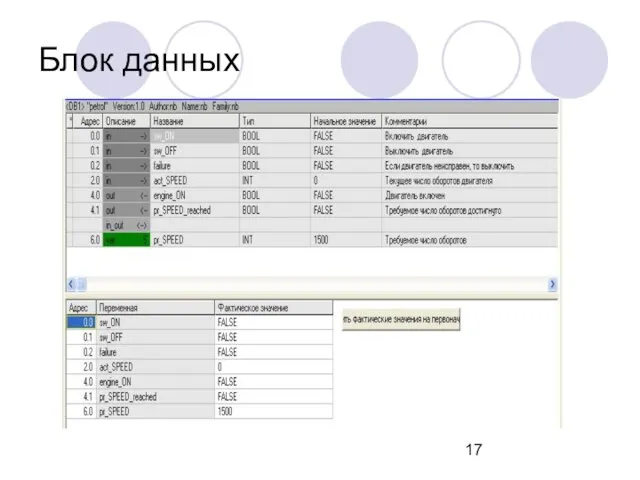
Блок данных
Блок данных
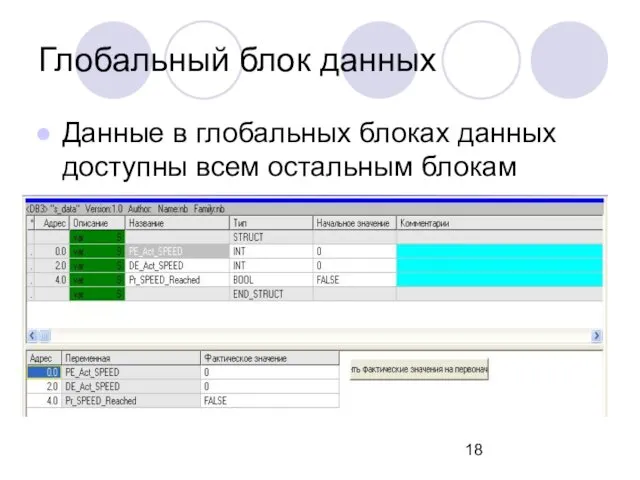
Глобальный блок данных
Данные в глобальных блоках данных доступны всем остальным блокам
Глобальный блок данных
Данные в глобальных блоках данных доступны всем остальным блокам
Ресурсы СПО…
Проект – это совокупность программных компонентов, ресурсов и данных, которая
Ресурсы СПО…
Проект – это совокупность программных компонентов, ресурсов и данных, которая
Переменная типа S5TIME используется для установки таймеров системы SIMATIC
время устанавливается
Переменная типа S5TIME используется для установки таймеров системы SIMATIC
время устанавливается
Доступны следующие таймеры
в виде блочных элементов
S_IMPULS (SI) – задание параметров и
Доступны следующие таймеры
в виде блочных элементов
S_IMPULS (SI) – задание параметров и
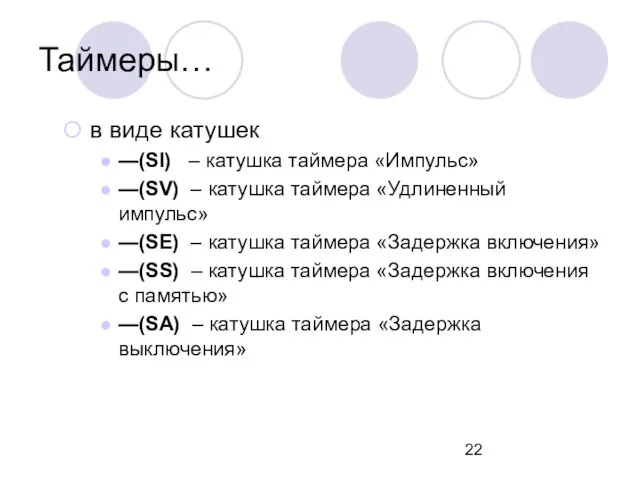
в виде катушек
—(SI) – катушка таймера «Импульс»
—(SV) – катушка таймера «Удлиненный
в виде катушек
—(SI) – катушка таймера «Импульс»
—(SV) – катушка таймера «Удлиненный
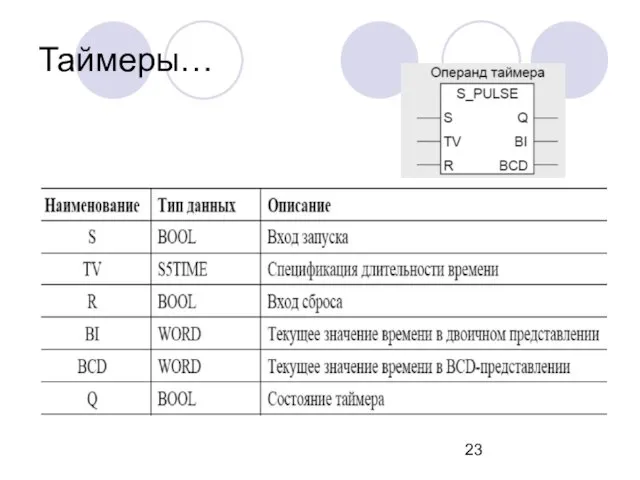
Таймеры…
Таймеры…
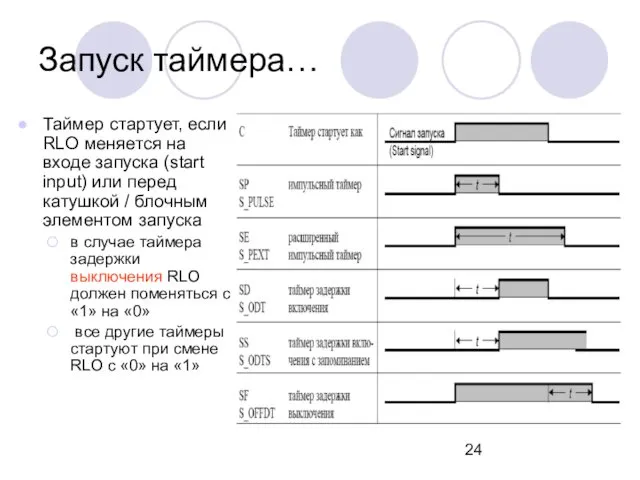
Запуск таймера…
Таймер стартует, если RLO меняется на входе запуска (start input)
Запуск таймера…
Таймер стартует, если RLO меняется на входе запуска (start input)
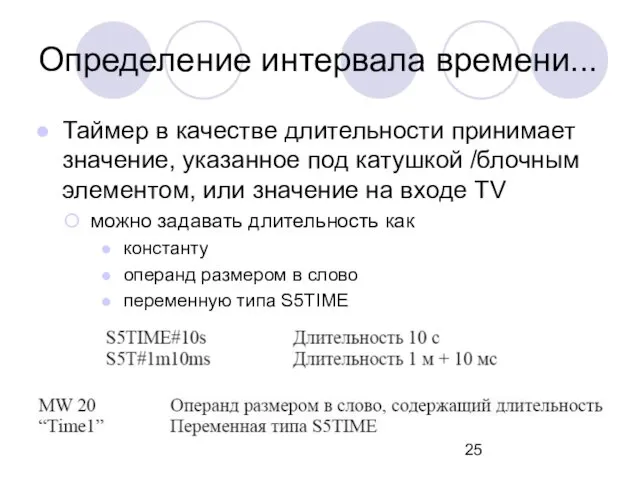
Определение интервала времени...
Таймер в качестве длительности принимает значение, указанное под катушкой
Определение интервала времени...
Таймер в качестве длительности принимает значение, указанное под катушкой
IEC-таймеры …
встроены в операционную систему CPU как системные функциональные блоки (блоки
IEC-таймеры …
встроены в операционную систему CPU как системные функциональные блоки (блоки
Счетчики (counters) …
используют CPU в вычислительных задачах для счета
по возрастанию (прямой
Счетчики (counters) …
используют CPU в вычислительных задачах для счета
по возрастанию (прямой
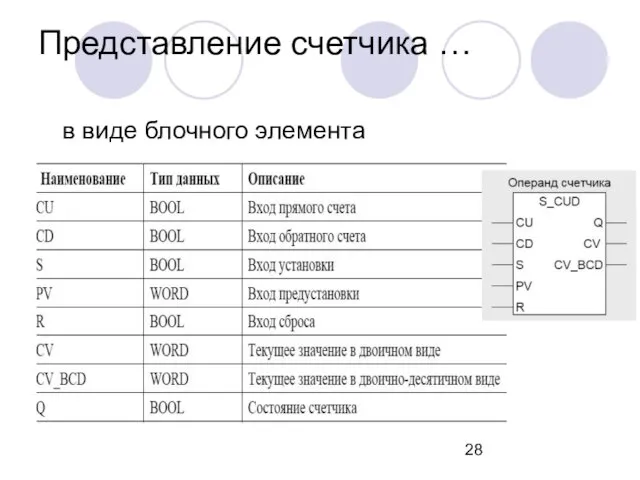
Представление счетчика …
в виде блочного элемента
Представление счетчика …
в виде блочного элемента
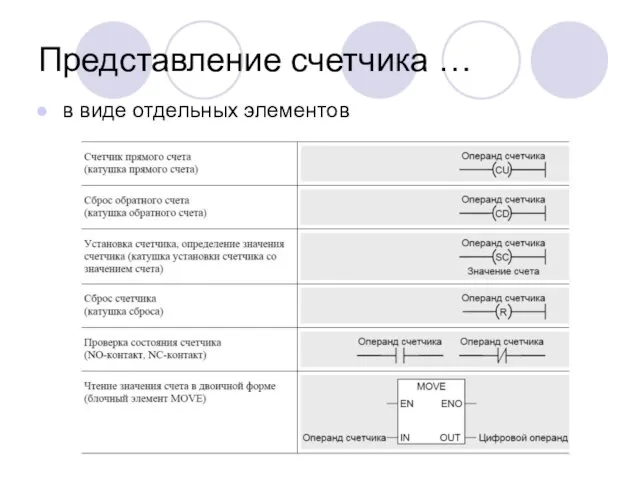
Представление счетчика …
в виде отдельных элементов
Представление счетчика …
в виде отдельных элементов
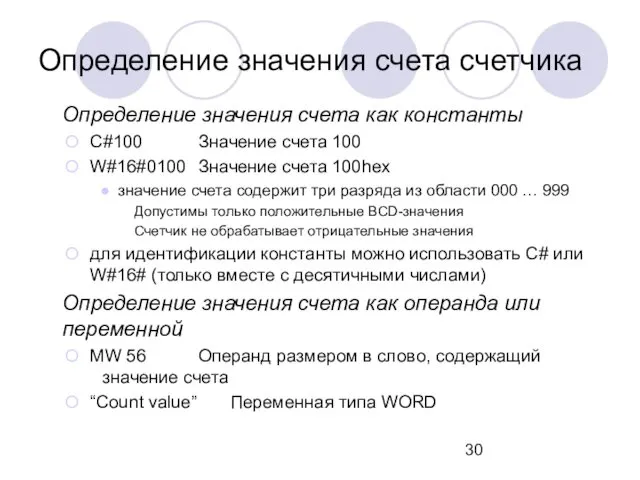
Определение значения счета счетчика
Определение значения счета как константы
C#100 Значение счета 100
W#16#0100
Определение значения счета счетчика
Определение значения счета как константы
C#100 Значение счета 100
W#16#0100
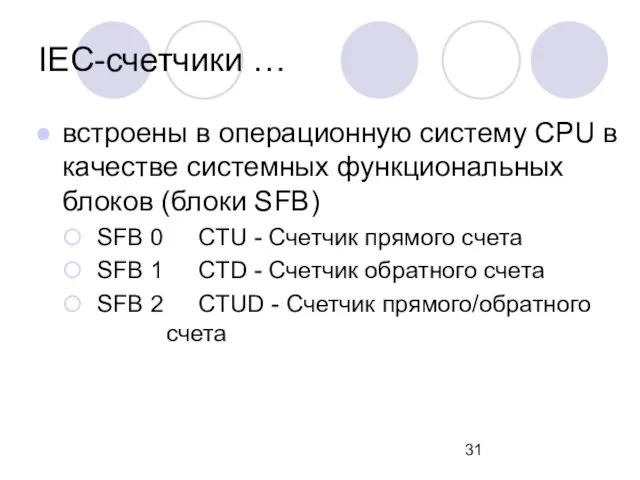
IEC-счетчики …
встроены в операционную систему CPU в качестве системных функциональных блоков
IEC-счетчики …
встроены в операционную систему CPU в качестве системных функциональных блоков
Програмне забезпечення
мікропроцесорних систем
Лекция 12
Реализация управления в WinPLC7
Лысаченко И.Г.
2012
Національний технічний університет
«Харківський Політехнічній
Програмне забезпечення
мікропроцесорних систем
Лекция 12
Реализация управления в WinPLC7
Лысаченко И.Г.
2012
Національний технічний університет
«Харківський Політехнічній
Вопросы лекции
Опрос специфических сигналов дискретными входами
фиксация коротких импульсов (alarm)
Вопросы лекции
Опрос специфических сигналов дискретными входами
фиксация коротких импульсов (alarm)
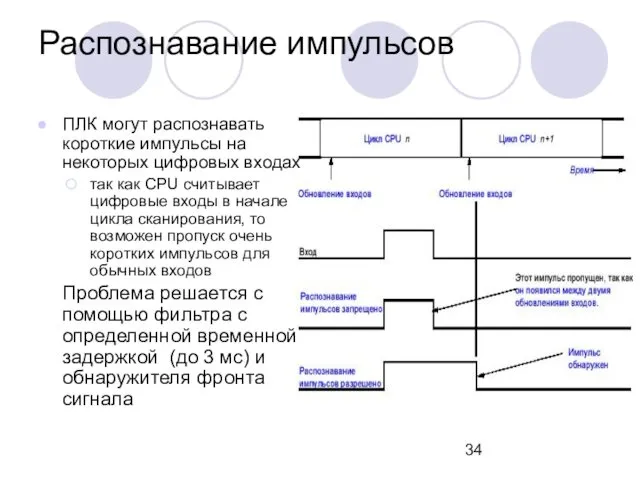
Распознавание импульсов
ПЛК могут распознавать короткие импульсы на некоторых цифровых входах
так
Распознавание импульсов
ПЛК могут распознавать короткие импульсы на некоторых цифровых входах
так
Скоростные счетчики
Скоростные счетчики (HSC) считают происходящие с высокой скоростью события, которые
Скоростные счетчики
Скоростные счетчики (HSC) считают происходящие с высокой скоростью события, которые
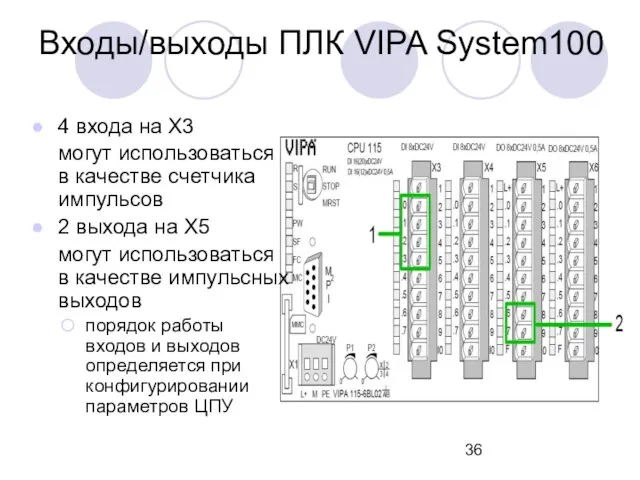
Входы/выходы ПЛК VIPA System100
4 входа на X3
могут использоваться в качестве счетчика
Входы/выходы ПЛК VIPA System100
4 входа на X3
могут использоваться в качестве счетчика
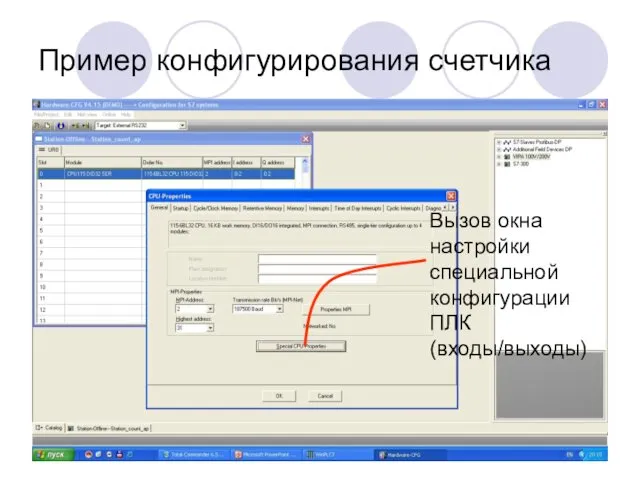
Пример конфигурирования счетчика
Вызов окна настройки
специальной конфигурации
ПЛК (входы/выходы)
Пример конфигурирования счетчика
Вызов окна настройки
специальной конфигурации
ПЛК (входы/выходы)
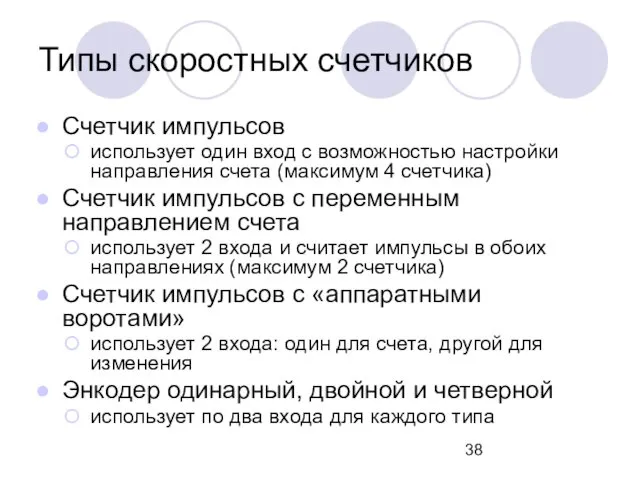
Счетчик импульсов
использует один вход с возможностью настройки направления счета (максимум 4
Счетчик импульсов
использует один вход с возможностью настройки направления счета (максимум 4
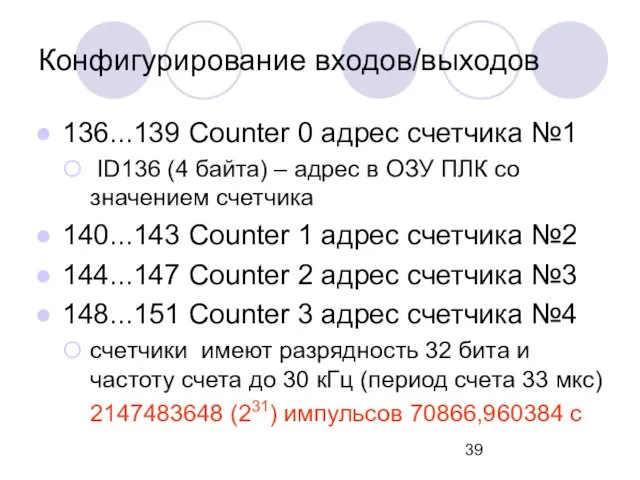
Конфигурирование входов/выходов
136...139 Counter 0 адрес счетчика №1
ID136 (4 байта) –
Конфигурирование входов/выходов
136...139 Counter 0 адрес счетчика №1
ID136 (4 байта) –
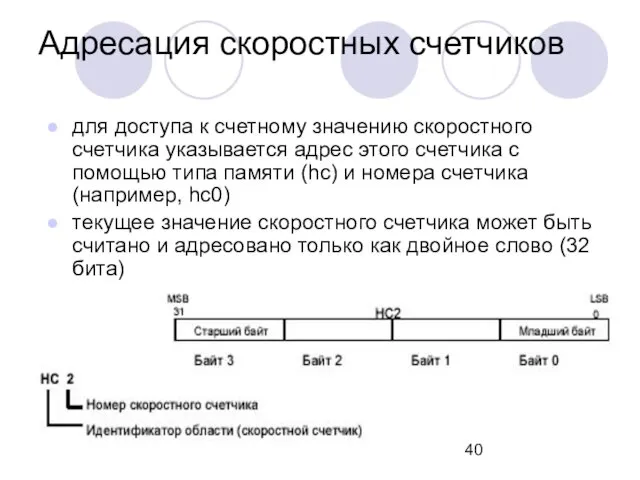
Адресация скоростных счетчиков
для доступа к счетному значению скоростного счетчика указывается адрес
Адресация скоростных счетчиков
для доступа к счетному значению скоростного счетчика указывается адрес
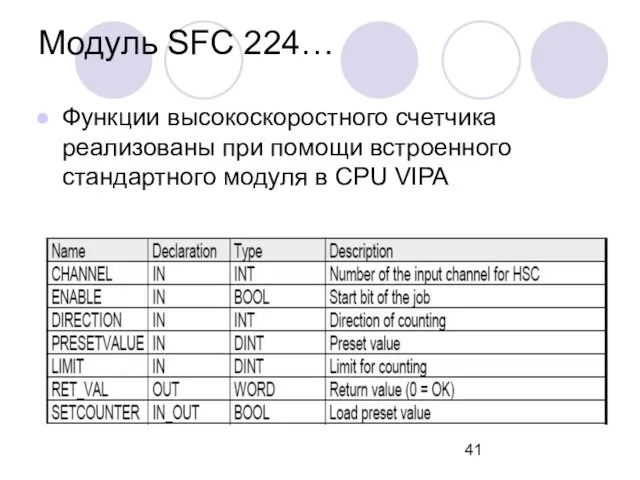
Модуль SFC 224…
Функции высокоскоростного счетчика реализованы при помощи встроенного стандартного модуля
Модуль SFC 224…
Функции высокоскоростного счетчика реализованы при помощи встроенного стандартного модуля
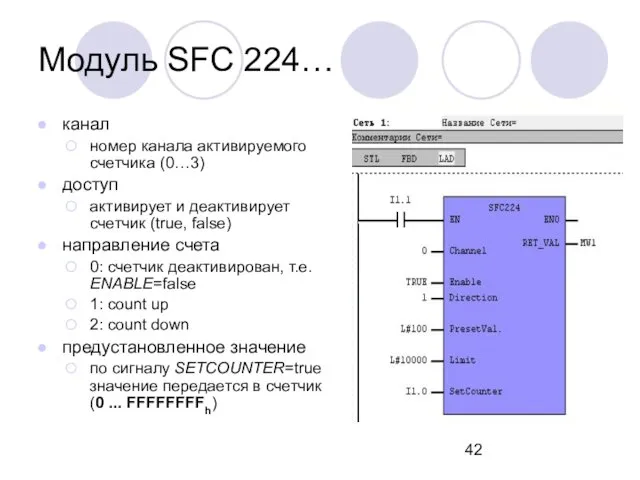
Модуль SFC 224…
канал
номер канала активируемого счетчика (0…3)
доступ
активирует и деактивирует счетчик (true,
Модуль SFC 224…
канал
номер канала активируемого счетчика (0…3)
доступ
активирует и деактивирует счетчик (true,
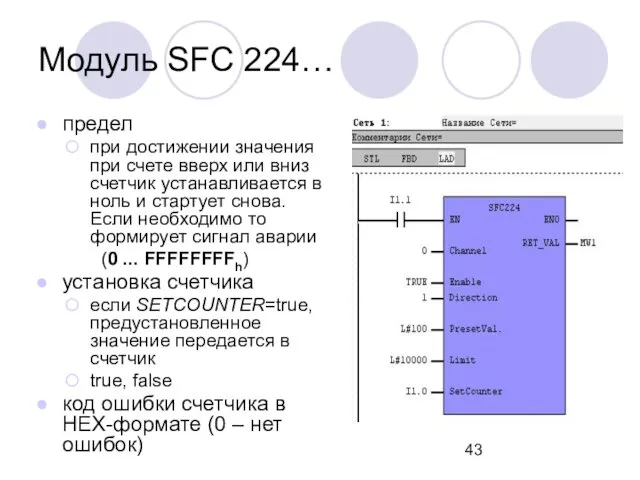
Модуль SFC 224…
предел
при достижении значения при счете вверх или вниз счетчик
Модуль SFC 224…
предел
при достижении значения при счете вверх или вниз счетчик
Управление дискретными выходами
могут работать в режиме ШИМ (PWM) с максимальной частотой
Управление дискретными выходами
могут работать в режиме ШИМ (PWM) с максимальной частотой
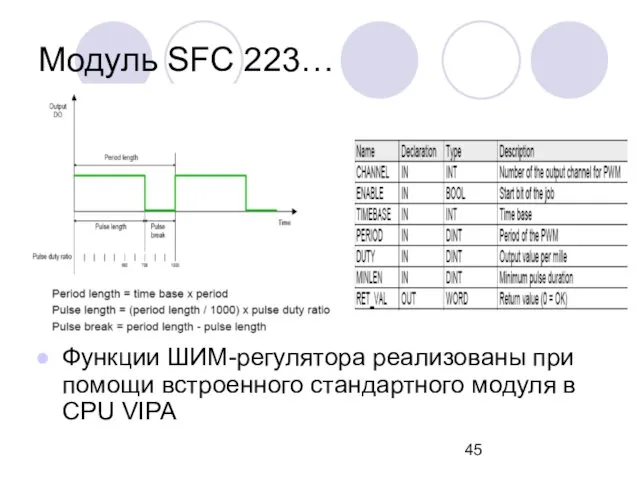
Модуль SFC 223…
Функции ШИМ-регулятора реализованы при помощи встроенного стандартного модуля в
Модуль SFC 223…
Функции ШИМ-регулятора реализованы при помощи встроенного стандартного модуля в
Модуль SFC 223…
канал
номер канала (0…1)
доступ
активирует или деактивирует ШИМ (true, false)
временная база
определяет
Модуль SFC 223…
канал
номер канала (0…1)
доступ
активирует или деактивирует ШИМ (true, false)
временная база
определяет
Модуль SFC 223…
скважность
отношение длительности импульса к длительности паузы (0 ... 1000)
мин.
Модуль SFC 223…
скважность
отношение длительности импульса к длительности паузы (0 ... 1000)
мин.
SFC 225 - HF_PWM…
Высокочастотный ШИМ
частота 2500 ... 50000 Гц
SFC 225 - HF_PWM…
Высокочастотный ШИМ
частота 2500 ... 50000 Гц
Выводы по лекции
Регулирование осуществляется либо аппаратно, либо программно при помощи функциональных
Выводы по лекции
Регулирование осуществляется либо аппаратно, либо программно при помощи функциональных
Програмне забезпечення
мікропроцесорних систем
Лекция 13
Реализация регулирования в WinPLC7
Лысаченко И.Г.
2012
Національний технічний університет
«Харківський Політехнічній
Програмне забезпечення
мікропроцесорних систем
Лекция 13
Реализация регулирования в WinPLC7
Лысаченко И.Г.
2012
Національний технічний університет
«Харківський Політехнічній
Вопросы лекции
Классификация аналоговых модулей
Опрос аналоговых датчиков
Управление аналоговыми выходами
Вопросы лекции
Классификация аналоговых модулей
Опрос аналоговых датчиков
Управление аналоговыми выходами
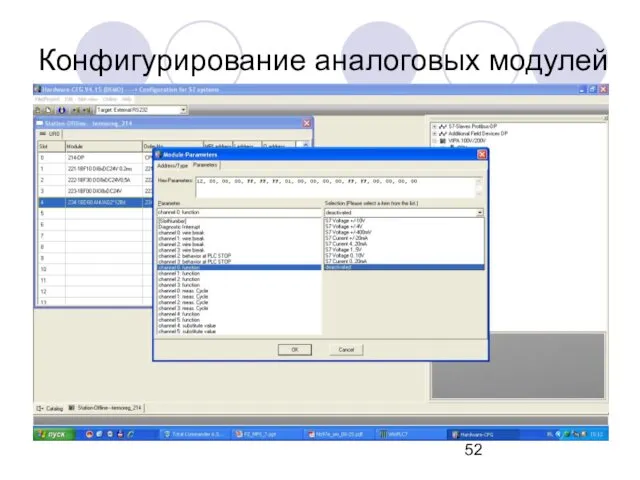
Конфигурирование аналоговых модулей
Конфигурирование аналоговых модулей
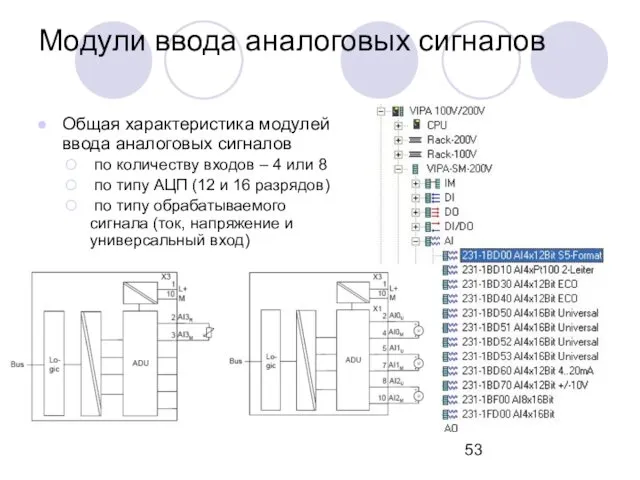
Модули ввода аналоговых сигналов
Общая характеристика модулей ввода аналоговых сигналов
по количеству
Модули ввода аналоговых сигналов
Общая характеристика модулей ввода аналоговых сигналов
по количеству
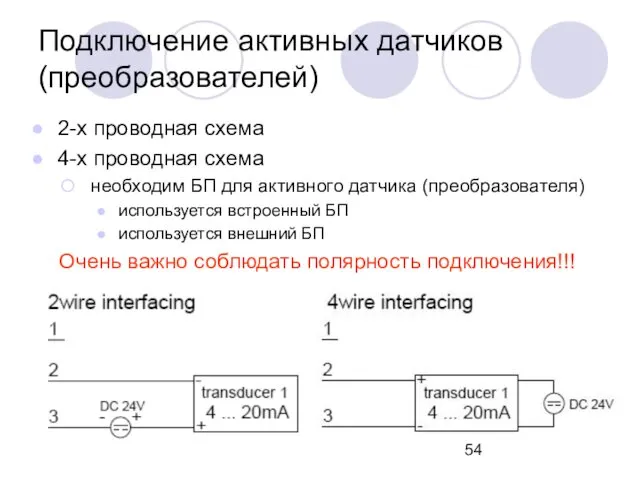
Подключение активных датчиков (преобразователей)
2-х проводная схема
4-х проводная схема
необходим БП
Подключение активных датчиков (преобразователей)
2-х проводная схема
4-х проводная схема
необходим БП
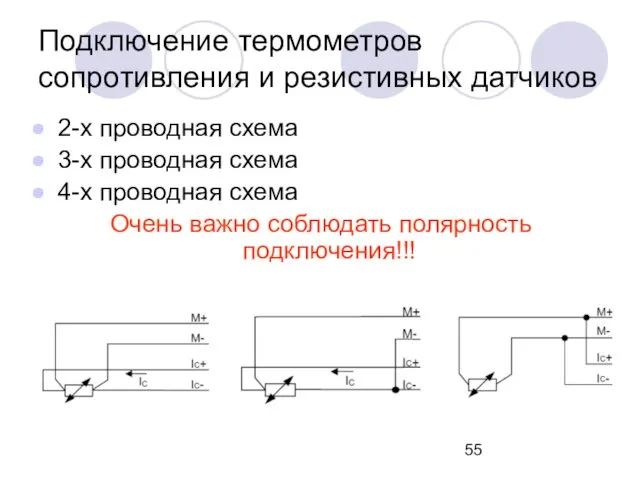
Подключение термометров сопротивления и резистивных датчиков
2-х проводная схема
3-х проводная схема
4-х проводная
Подключение термометров сопротивления и резистивных датчиков
2-х проводная схема
3-х проводная схема
4-х проводная
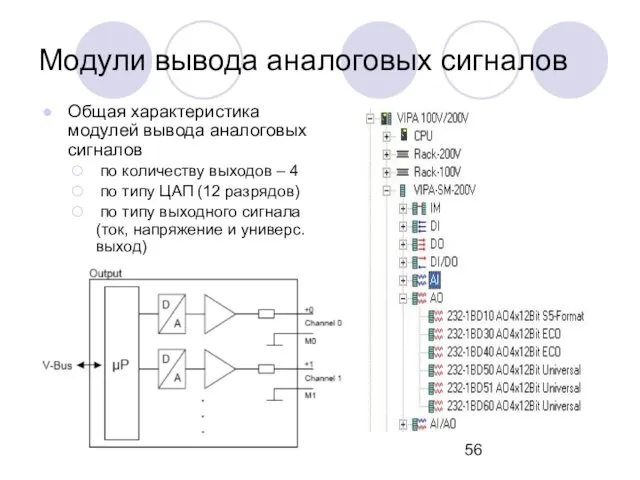
Модули вывода аналоговых сигналов
Общая характеристика модулей вывода аналоговых сигналов
по количеству
Модули вывода аналоговых сигналов
Общая характеристика модулей вывода аналоговых сигналов
по количеству

Модули ввода/вывода аналоговых сигналов и спец. модули
Комбинированные
параметризуются в программе конфигурации
Модули ввода/вывода аналоговых сигналов и спец. модули
Комбинированные
параметризуются в программе конфигурации
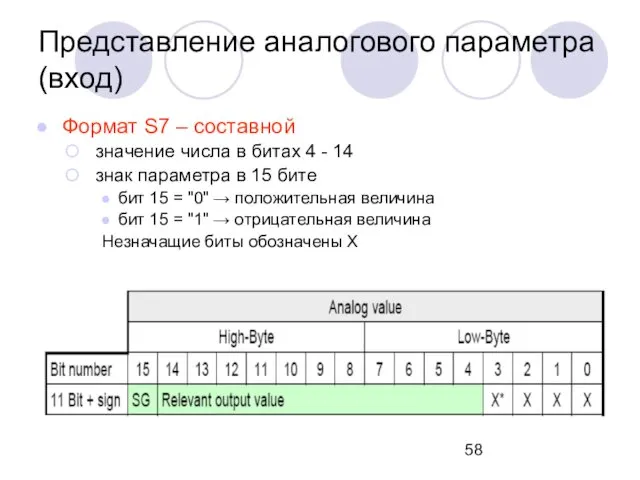
Формат S7 – составной
значение числа в битах 4 - 14
Формат S7 – составной
значение числа в битах 4 - 14
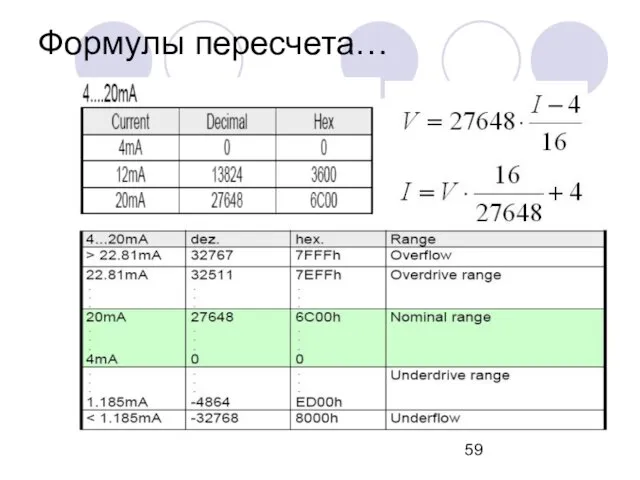
Формулы пересчета…
Формулы пересчета…
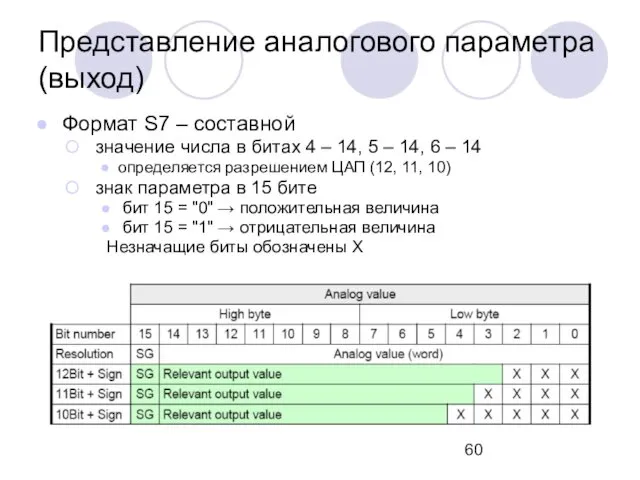
Формат S7 – составной
значение числа в битах 4 – 14,
Формат S7 – составной
значение числа в битах 4 – 14,
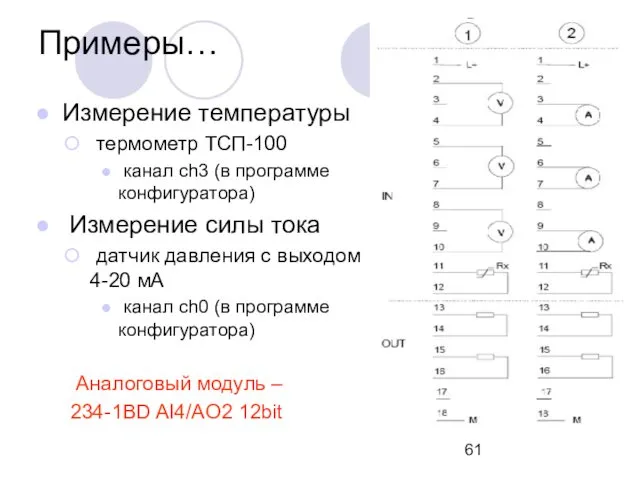
Примеры…
Измерение температуры
термометр ТСП-100
канал ch3 (в программе конфигуратора)
Измерение силы
Примеры…
Измерение температуры
термометр ТСП-100
канал ch3 (в программе конфигуратора)
Измерение силы
Настройки аналогового модуля
включение функции ”диагностического прерывания” вызывает OB86
при отсутствии
Настройки аналогового модуля
включение функции ”диагностического прерывания” вызывает OB86
при отсутствии
Пользовательская программа
Исходные данные
входные величины (значения, считанные с входных каналов) сохраняются
Пользовательская программа
Исходные данные
входные величины (значения, считанные с входных каналов) сохраняются
Элементы программы
циклическое сохранение значений аналоговых входов в блоке данных (DB1)
циклическое преобразование
Элементы программы
циклическое сохранение значений аналоговых входов в блоке данных (DB1)
циклическое преобразование

Этапы работы программы
Аналоговый входной модуль (АЦП) преобразует аналоговые сигналы процесса в
Этапы работы программы
Аналоговый входной модуль (АЦП) преобразует аналоговые сигналы процесса в
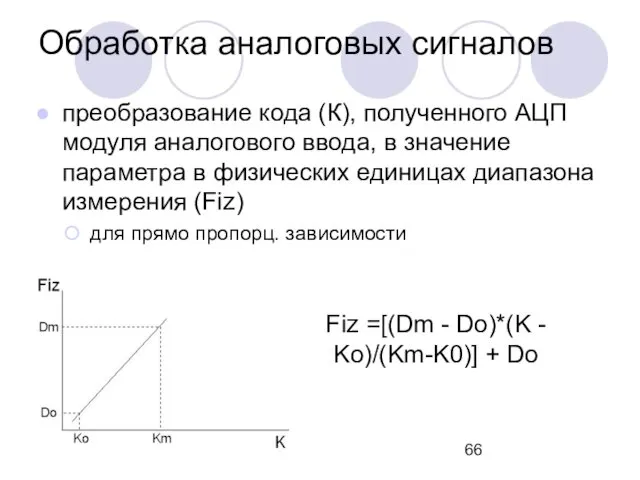
Обработка аналоговых сигналов
преобразование кода (К), полученного АЦП модуля аналогового ввода, в
Обработка аналоговых сигналов
преобразование кода (К), полученного АЦП модуля аналогового ввода, в
Диагностика работы модуля
Программа пользователя реагирует на ошибки аппаратной части
модуль должен иметь
Диагностика работы модуля
Программа пользователя реагирует на ошибки аппаратной части
модуль должен иметь
Диагностика работы каналов
ошибка конфигурирования или параметрирования
общая ошибка
ошибка подключения питания
обрыв провода
при
Диагностика работы каналов
ошибка конфигурирования или параметрирования
общая ошибка
ошибка подключения питания
обрыв провода
при
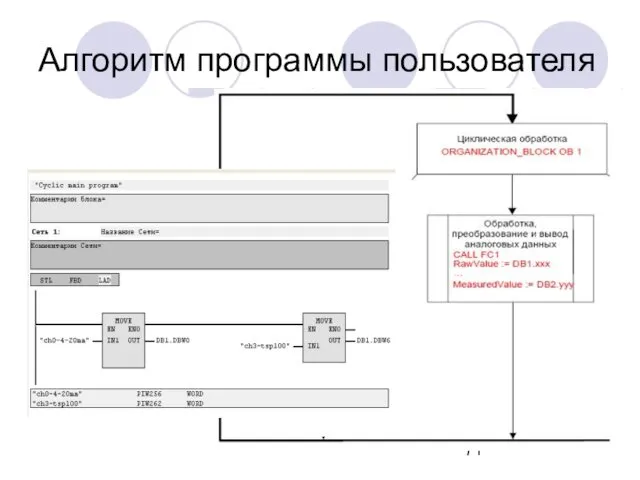
Алгоритм программы пользователя
Алгоритм программы пользователя
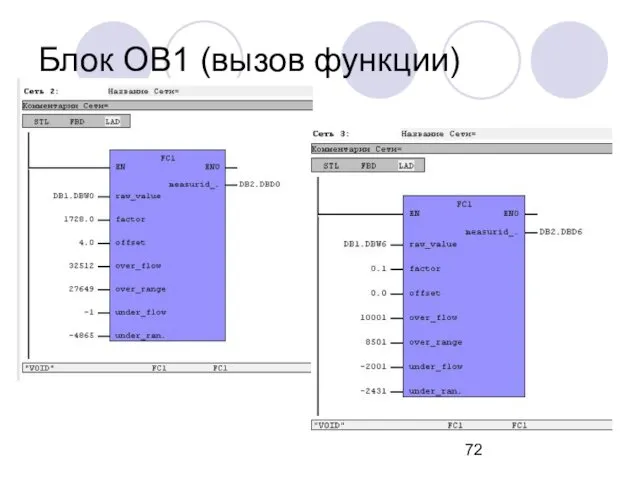
Блок ОВ1 (вызов функции)
Блок ОВ1 (вызов функции)
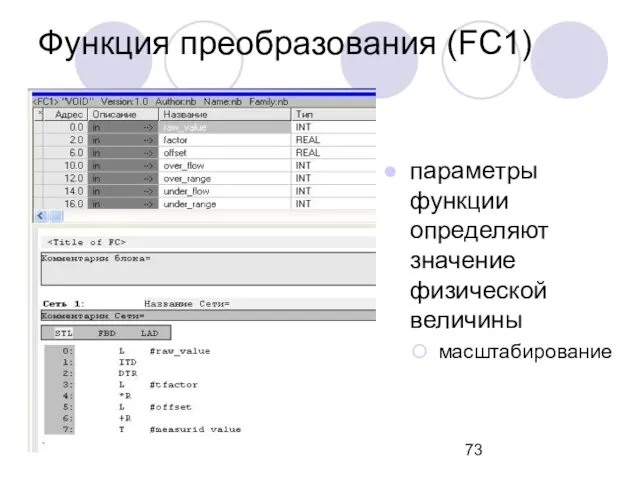
Функция преобразования (FC1)
параметры функции определяют значение физической величины
масштабирование
Функция преобразования (FC1)
параметры функции определяют значение физической величины
масштабирование
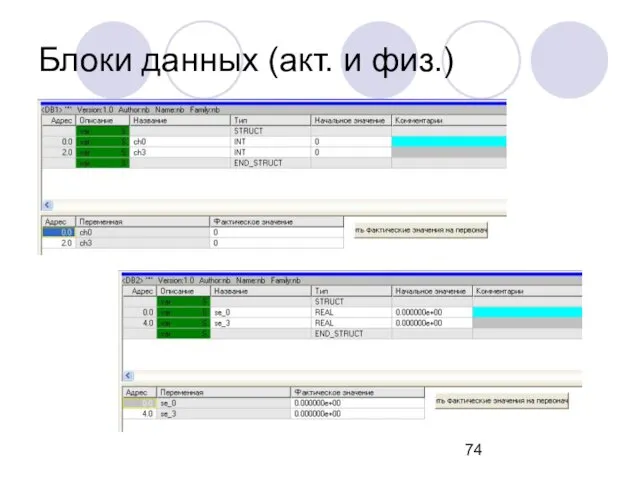
Блоки данных (акт. и физ.)
Блоки данных (акт. и физ.)
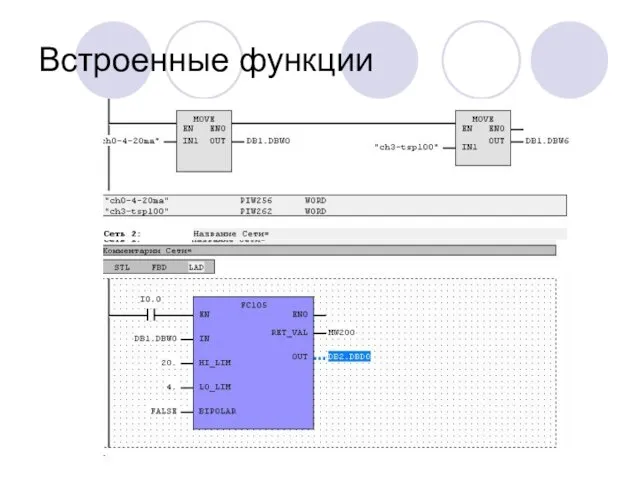
Встроенные функции
Встроенные функции
Выводы по лекции
Обработка аналоговых сигналов сопряжена с дополнительными операциями над текущим
Выводы по лекции
Обработка аналоговых сигналов сопряжена с дополнительными операциями над текущим
Програмне забезпечення
мікропроцесорних систем
Лекция 14
Разработка ПИД-регулятора в WinPLC7
Лысаченко И.Г.
2012
Національний технічний університет
«Харківський Політехнічній
Програмне забезпечення
мікропроцесорних систем
Лекция 14
Разработка ПИД-регулятора в WinPLC7
Лысаченко И.Г.
2012
Національний технічний університет
«Харківський Політехнічній
Вопросы лекции
ПИД-регулятор ступенчатый
ПИД-регулятор непрерывный
применение встроенного генератора импульсов в ПИД-регуляторах
Вопросы лекции
ПИД-регулятор ступенчатый
ПИД-регулятор непрерывный
применение встроенного генератора импульсов в ПИД-регуляторах
Постановка задачи
Необходимо разработать программу для ПИД-регулятора
в проекте предусмотреть возможность
Постановка задачи
Необходимо разработать программу для ПИД-регулятора
в проекте предусмотреть возможность
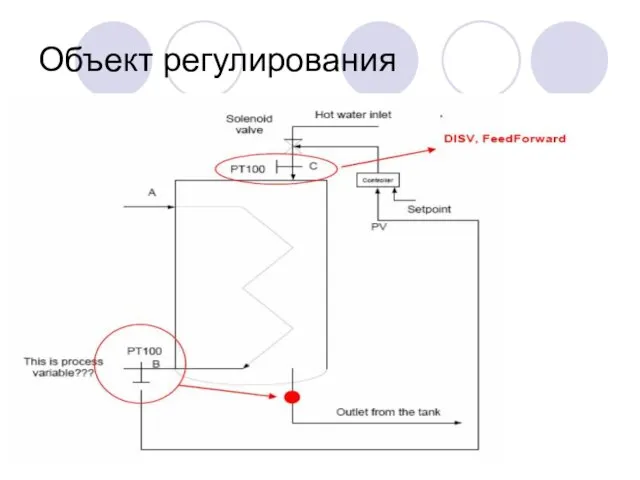
Объект регулирования
Объект регулирования
Ступенчатый регулятор с
имитацией объекта управления
реализуется с помощью системного функционального блока (SFB42)
Ступенчатый регулятор с
имитацией объекта управления
реализуется с помощью системного функционального блока (SFB42)
Структура проекта
Проект состоит в основном из двух ФБ CONT_S и
Структура проекта
Проект состоит в основном из двух ФБ CONT_S и
Структура проекта
Структура проекта
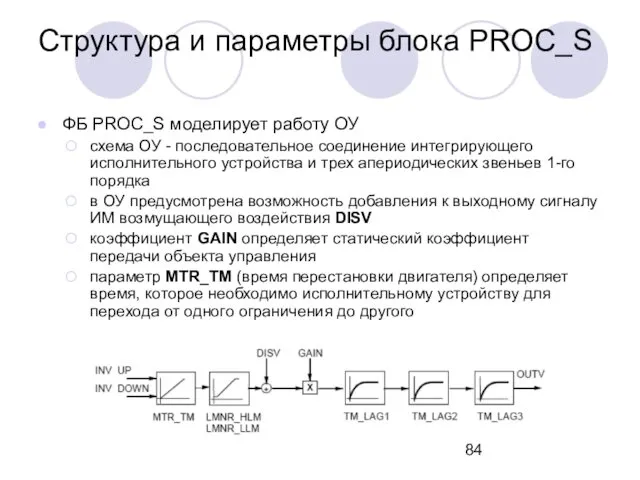
Структура и параметры блока PROC_S
ФБ PROC_S моделирует работу ОУ
схема ОУ -
Структура и параметры блока PROC_S
ФБ PROC_S моделирует работу ОУ
схема ОУ -
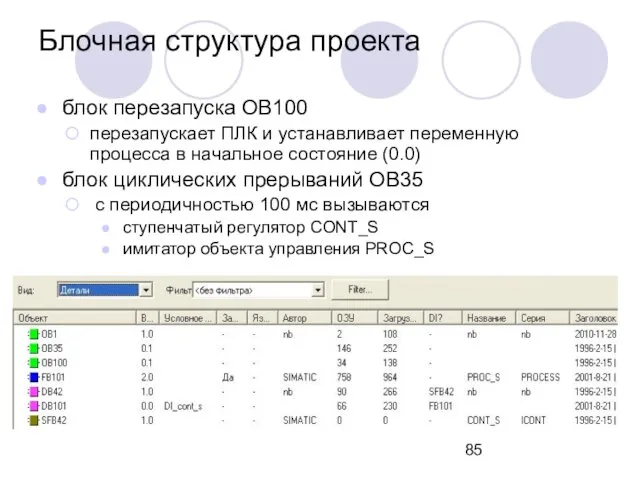
Блочная структура проекта
блок перезапуска OB100
перезапускает ПЛК и устанавливает переменную процесса в
Блочная структура проекта
блок перезапуска OB100
перезапускает ПЛК и устанавливает переменную процесса в
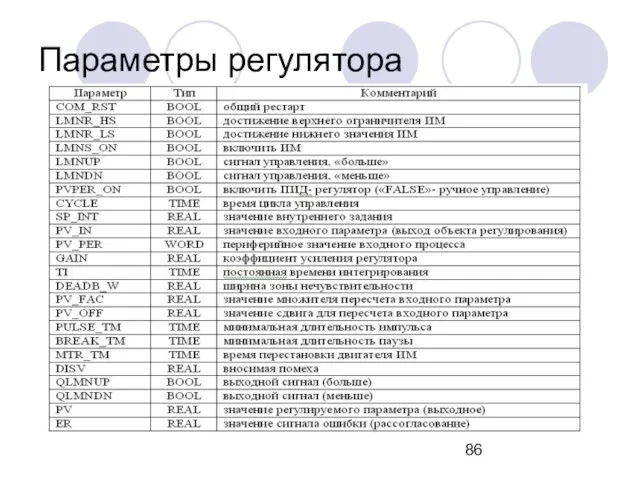
Параметры регулятора
Параметры регулятора
Описание переменных регулятора
Задание вводится на входе SP_INT в формате числа с
Описание переменных регулятора
Задание вводится на входе SP_INT в формате числа с
функция PV_NORM нормирует выход CRP_IN в соответствии с формулой
Выход PV_NORM =
функция PV_NORM нормирует выход CRP_IN в соответствии с формулой
Выход PV_NORM =
Значение, вводимое вручную
имеется возможность переключения между ручным и автоматическим режимом.
в ручном
Значение, вводимое вручную
имеется возможность переключения между ручным и автоматическим режимом.
в ручном
Управляющее воздействие
управляющая величина может быть ограничена выбранным значением с помощью функции
Управляющее воздействие
управляющая величина может быть ограничена выбранным значением с помощью функции
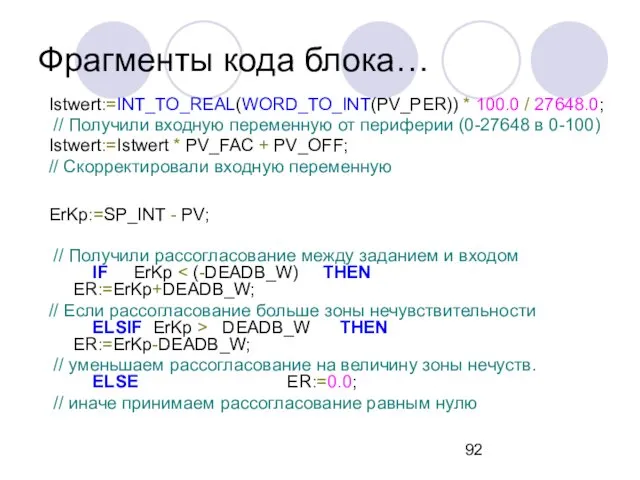
Фрагменты кода блока…
Istwert:=INT_TO_REAL(WORD_TO_INT(PV_PER)) * 100.0 / 27648.0;
// Получили входную переменную
Фрагменты кода блока…
Istwert:=INT_TO_REAL(WORD_TO_INT(PV_PER)) * 100.0 / 27648.0;
// Получили входную переменную
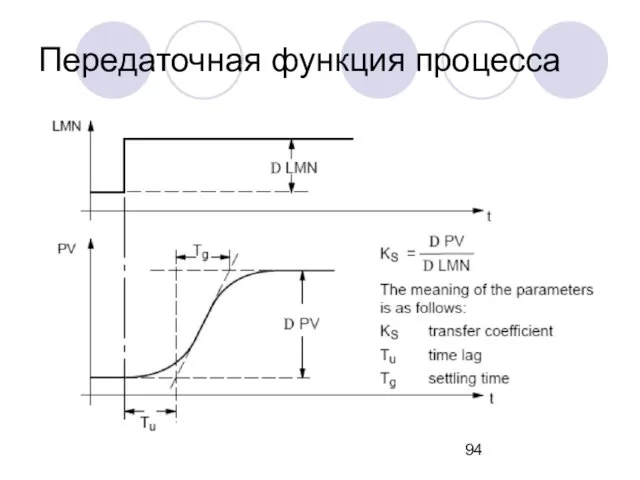
Передаточная функция процесса
Передаточная функция процесса

Блок модели объекта
Блок модели объекта
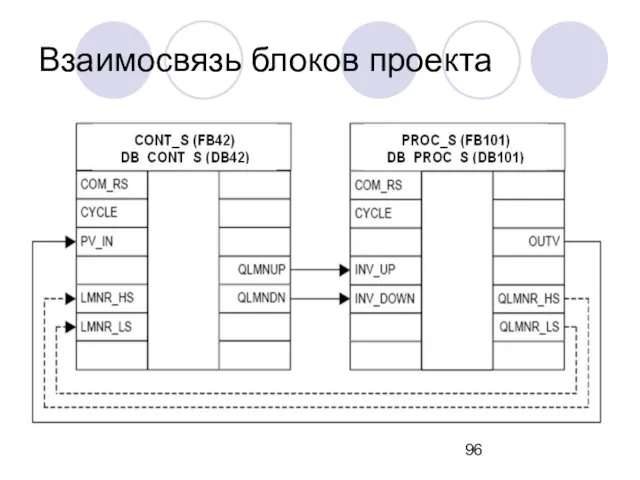
Взаимосвязь блоков проекта
Взаимосвязь блоков проекта
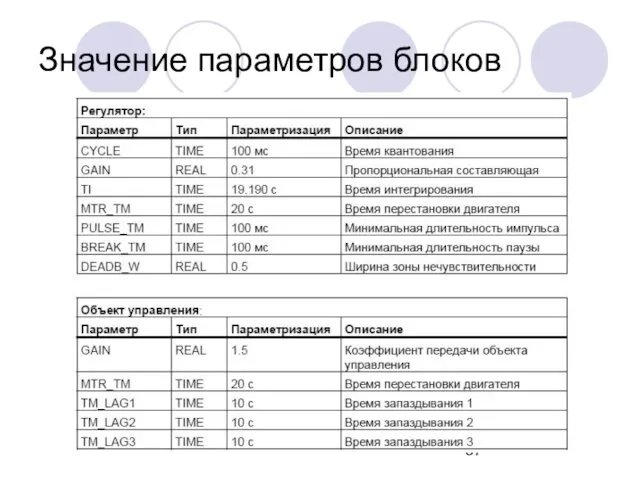
Значение параметров блоков
Значение параметров блоков
Организационные блоки
необходимо настроить
ОВ1
ОВ35
в блоке две сети, которые по
Организационные блоки
необходимо настроить
ОВ1
ОВ35
в блоке две сети, которые по
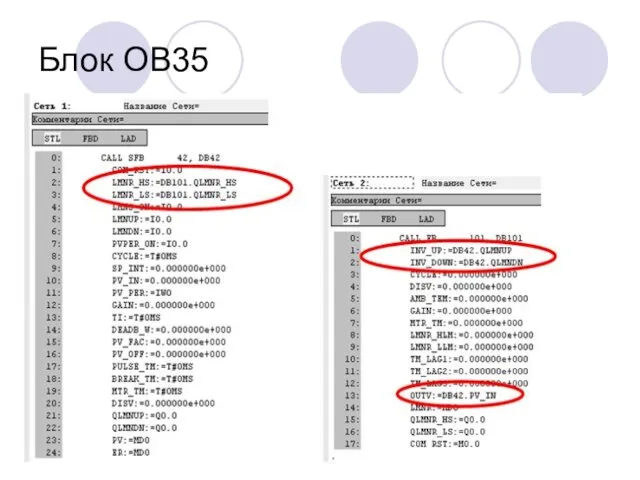
Блок ОВ35
Блок ОВ35
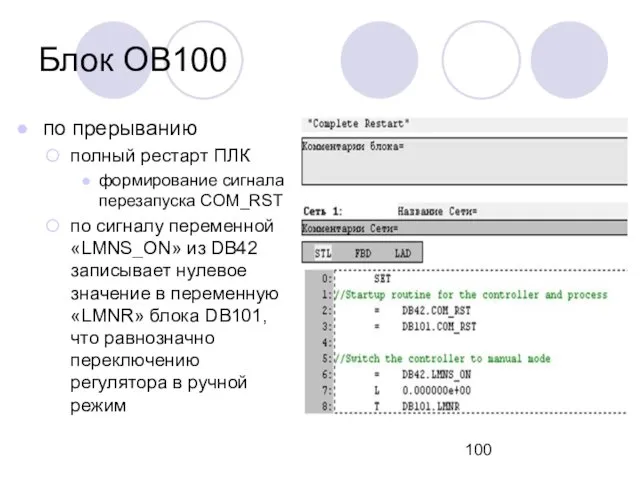
Блок ОВ100
по прерыванию
полный рестарт ПЛК
формирование сигнала перезапуска COM_RST
по сигналу переменной «LMNS_ON»
Блок ОВ100
по прерыванию
полный рестарт ПЛК
формирование сигнала перезапуска COM_RST
по сигналу переменной «LMNS_ON»
Непрерывный ПИД-регулятор
Реализуется с помощью системного функционального блока (SFB41) CONT_С
для параметризации работы
Непрерывный ПИД-регулятор
Реализуется с помощью системного функционального блока (SFB41) CONT_С
для параметризации работы
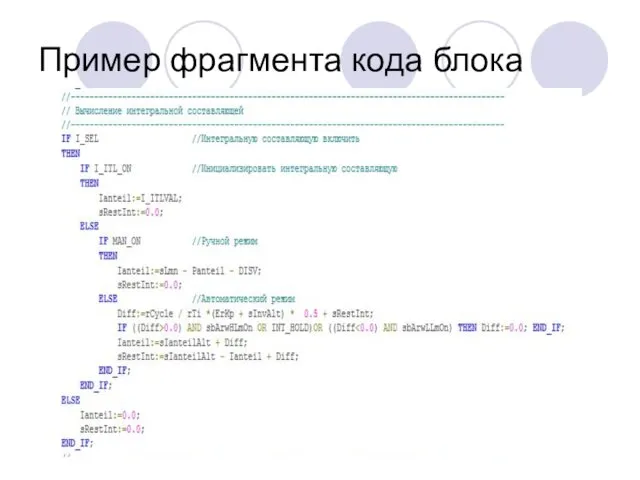
Пример фрагмента кода блока
Пример фрагмента кода блока
Структура проекта
Структура проекта
Структура и параметры блока PROC_С
ФБ PROC_С моделирует работу ОУ
схема ОУ -
Структура и параметры блока PROC_С
ФБ PROC_С моделирует работу ОУ
схема ОУ -
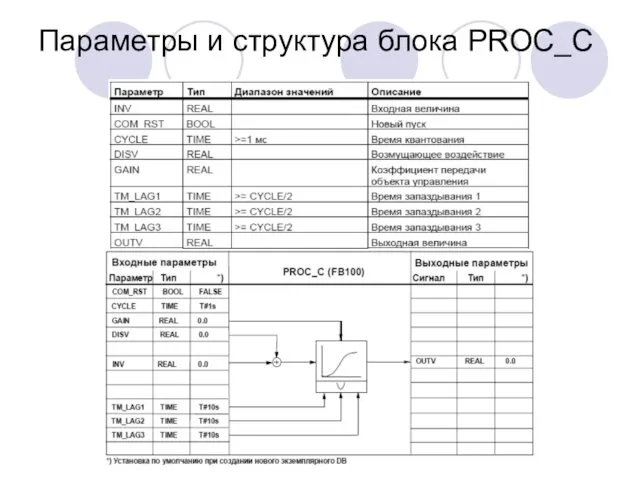
Параметры и структура блока PROC_C
Параметры и структура блока PROC_C
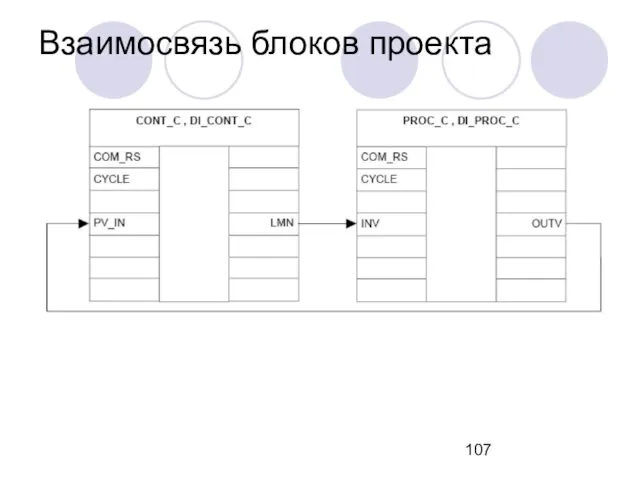
Взаимосвязь блоков проекта
Взаимосвязь блоков проекта
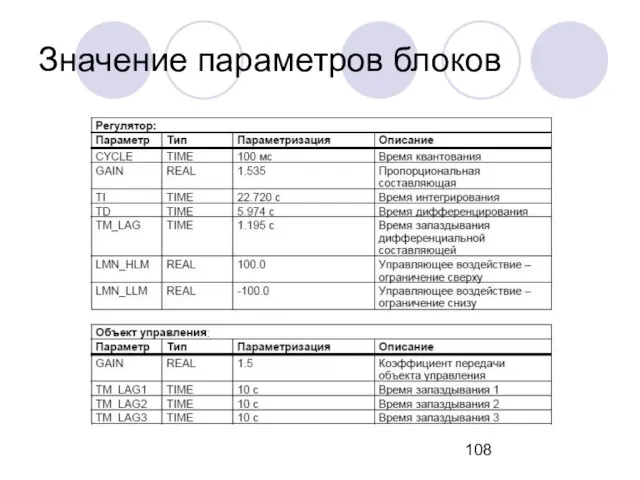
Значение параметров блоков
Значение параметров блоков
Применение блока генератора импульса (SFB43)
Непрерывный регулятор CONT_C с последовательно включенным формирователем
Применение блока генератора импульса (SFB43)
Непрерывный регулятор CONT_C с последовательно включенным формирователем
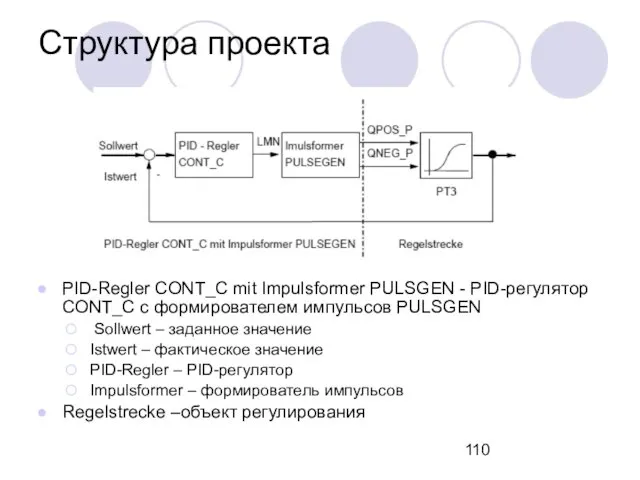
Структура проекта
PID-Regler CONT_C mit Impulsformer PULSGEN - PID-регулятор CONT_C с формирователем
Структура проекта
PID-Regler CONT_C mit Impulsformer PULSGEN - PID-регулятор CONT_C с формирователем
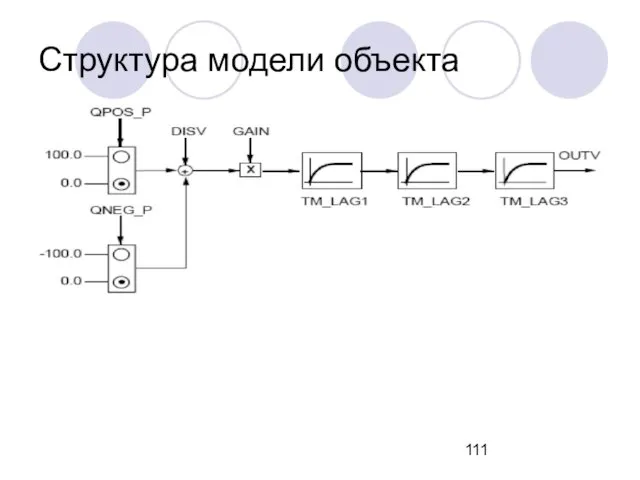
Структура модели объекта
Структура модели объекта
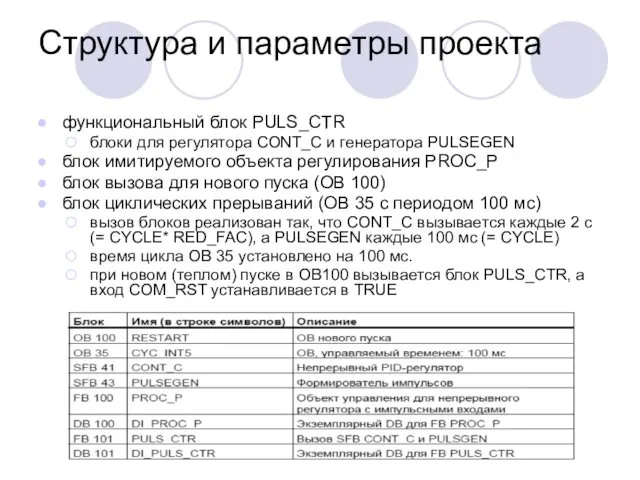
Структура и параметры проекта
функциональный блок PULS_CTR
блоки для регулятора CONT_C и генератора
Структура и параметры проекта
функциональный блок PULS_CTR
блоки для регулятора CONT_C и генератора
Структура и параметры проекта
Структура и параметры проекта
Взаимосвязь блоков проекта
Взаимосвязь блоков проекта
 Использование прикладных программ компьютера в работе с дошкольниками для формирования знаний по правилам дорожного движения
Использование прикладных программ компьютера в работе с дошкольниками для формирования знаний по правилам дорожного движения Информационное моделирование
Информационное моделирование Медиапланирование как основа деятельности пресс-службы
Медиапланирование как основа деятельности пресс-службы Растровая графика
Растровая графика Выполнение работ по одной или нескольким профессиям рабочих, должностям служащих
Выполнение работ по одной или нескольким профессиям рабочих, должностям служащих Введение в Python
Введение в Python Методы на языке С#
Методы на языке С# Алгоритми. Лекция 1
Алгоритми. Лекция 1 Основные понятия языка гипертекстовой разметки документов HTML. Структура html-документа
Основные понятия языка гипертекстовой разметки документов HTML. Структура html-документа Антивирусные программы
Антивирусные программы Веб-разработка. Библиотека jQuery
Веб-разработка. Библиотека jQuery Алфавитный подход к определению количества информации
Алфавитный подход к определению количества информации Обработка исключений Python
Обработка исключений Python Тема 6
Тема 6 Журнал Esquire как СМИ
Журнал Esquire как СМИ История телеканала TV1000
История телеканала TV1000 Онтологический инжиниринг
Онтологический инжиниринг Swot-анализ мобильного приложения GrandApp
Swot-анализ мобильного приложения GrandApp Администрирование информационных систем
Администрирование информационных систем Программа Графический дизайнер старт карьеры
Программа Графический дизайнер старт карьеры Python nima?
Python nima? Двигатели на платформе arduino
Двигатели на платформе arduino Системы оптического распознавания документов
Системы оптического распознавания документов Концептуальное проектирование базы данных
Концептуальное проектирование базы данных Мир электронной почты, телеконференция. 9 класс
Мир электронной почты, телеконференция. 9 класс Основные направления развития искусственного интеллекта (лекция 2)
Основные направления развития искусственного интеллекта (лекция 2) Основы алгебры логики. Логические основы компьютера
Основы алгебры логики. Логические основы компьютера Виды 3D-моделирования
Виды 3D-моделирования