- Уровень микроархитектуры. Современные многоуровневые машины

Содержание
- 2. Современные многоуровневые машины Цифровой логический уровень Уровень 0 Уровень микроархитектуры Уровень 1 Уровень архитектуры набора команд
- 3. Уровень микроархитектуры Задача – интерпретация команд уровня архитектуры команд. Строение уровня микроархитектуры зависит от того каков
- 4. Пример микроархитектуры Общих принципов разработки уровня микроархитектуры не существует!!! Пример: рассмотрим подмножество виртуальной машины Java (содержит
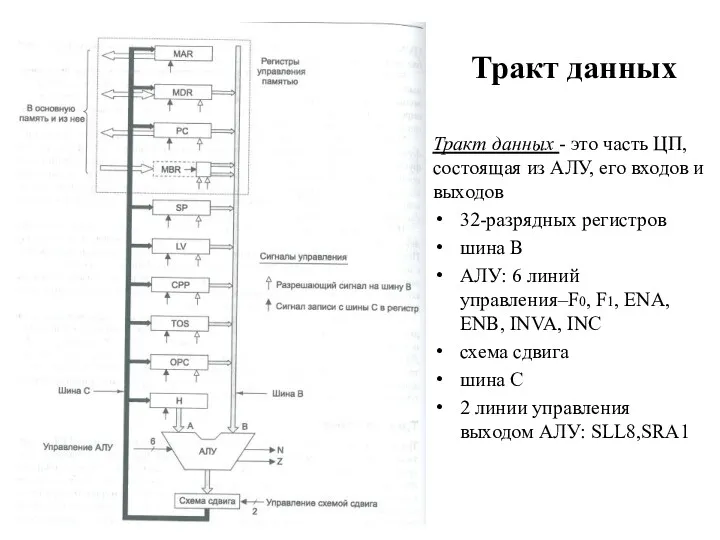
- 5. Тракт данных Тракт данных - это часть ЦП, состоящая из АЛУ, его входов и выходов 32-разрядных
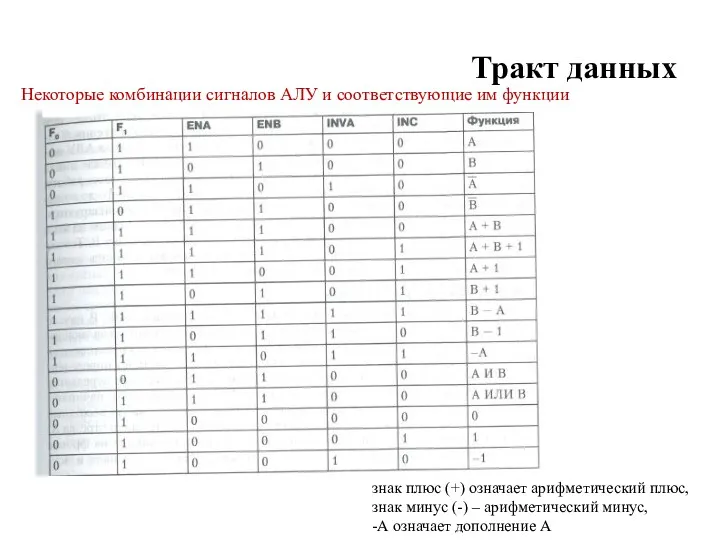
- 6. Тракт данных Некоторые комбинации сигналов АЛУ и соответствующие им функции знак плюс (+) означает арифметический плюс,
- 7. Тракт данных Содержание большинства регистров передается на шину В. Выходной сигнал АЛУ управляет схемой сдвига и
- 8. Тракт данных АЛУ содержит два входа для данных: левый вход (А) [c левым входом связан регистр
- 9. Тракт данных Операции чтения и записи регистра могут выполняться за один цикл: Пример: значение SP поместить
- 10. Синхронизация тракта данных Операции чтения и записи регистра могут выполняться за один цикл: Пример: значение SP
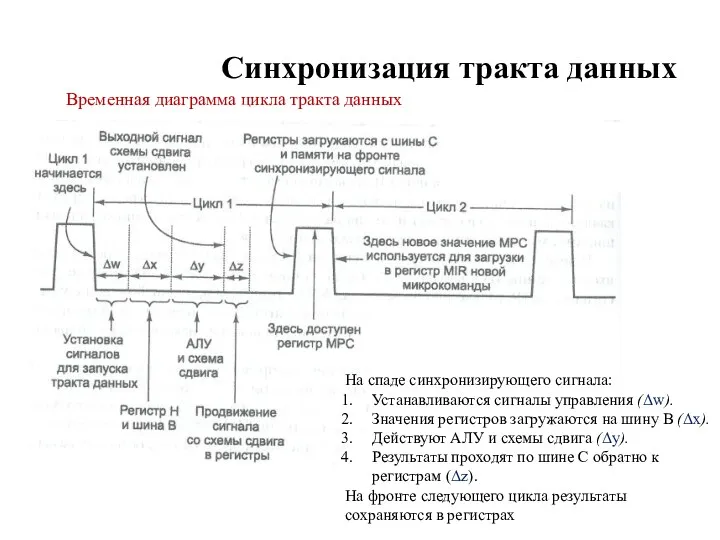
- 11. Синхронизация тракта данных Временная диаграмма цикла тракта данных На спаде синхронизирующего сигнала: Устанавливаются сигналы управления (Δw).
- 12. Синхронизация тракта данных В начале каждого цикла генерируется короткий импульс на спаде импульса устанавливаются биты, которые
- 13. Функционирование памяти Взаимодействие с памятью: через порт с пословной адресацией (32-разрядный) через порт с побайтовой адресацией
- 14. Регистры запускаются одним из сигналов управления. Белая стрелка – СУ, который разрешает передавать выходной сигнал регистра
- 15. Функционирование памяти Регистр MAR содержит адреса слов, таким образом, значения 0, 1, 2 и т. д.
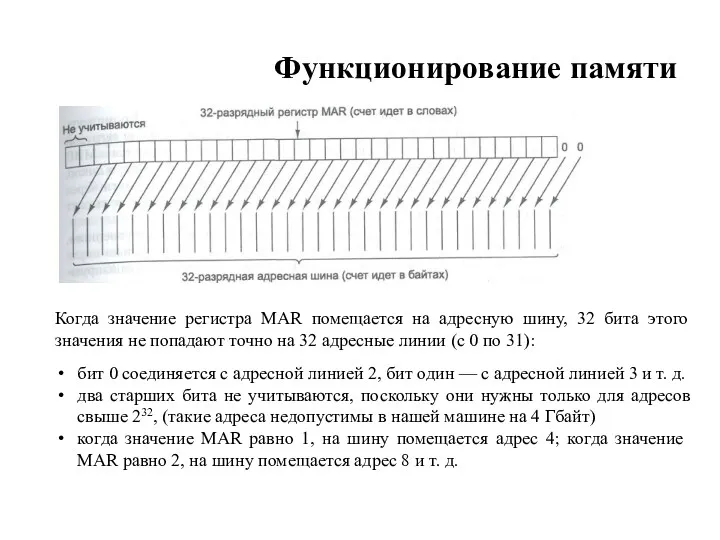
- 16. Функционирование памяти Когда значение регистра MAR помещается на адресную шину, 32 бита этого значения не попадают
- 17. Функционирование памяти Данные, считанные из памяти через 8-разрядный порт, сохраняются в 8-разрядном регистре MBR. Этот регистр
- 18. Функционирование памяти Другой способ превращения 8-разрядного регистра MBR в 32-разрядное слово - считать его значением со
- 19. Функционирование памяти Другой способ превращения 8-разрядного регистра MBR в 32-разрядное слово - считать его значением со
- 20. Микрокоманды Для управления ТД необходимо 29 сигналов 9 сигналов для записи данных с шины С в
- 21. Микрокоманды Значения этих 29 сигналов управления определяют операции для одного цикла ТД. Цикл состоит из передачи
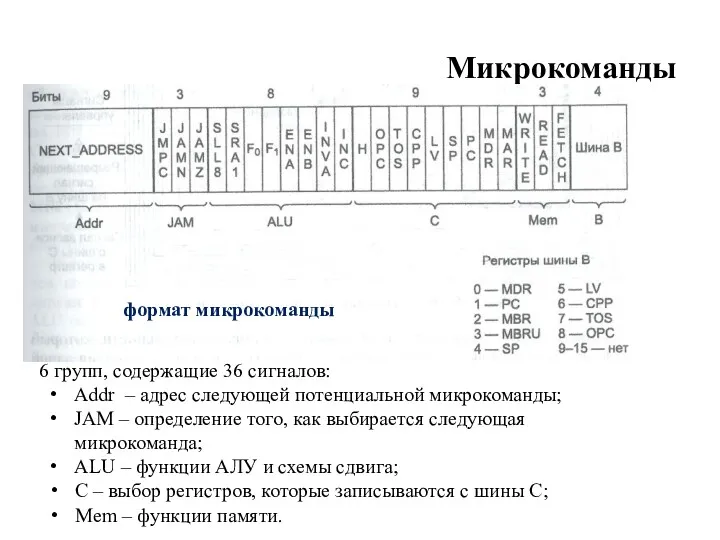
- 22. Микрокоманды формат микрокоманды 6 групп, содержащие 36 сигналов: Addr – адрес следующей потенциальной микрокоманды; JAM –
- 23. Управление микрокомандами Контроллер последовательности отвечает за последовательность операций, необходимых для выполнения одной команды. В каждом цикле
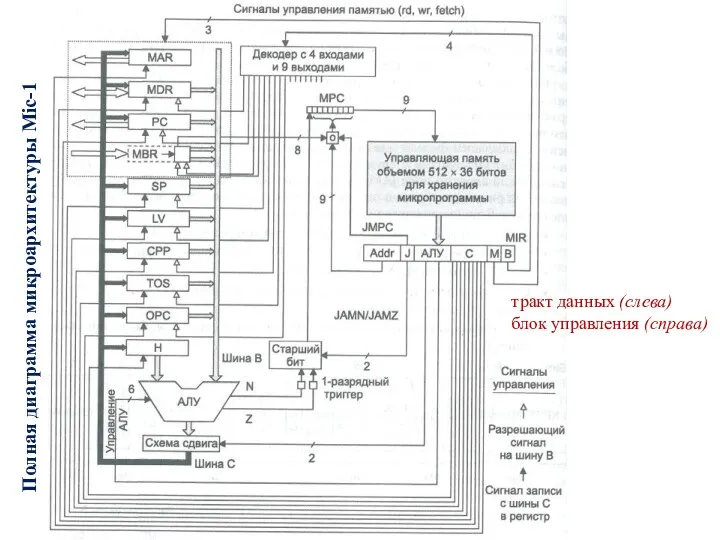
- 24. Полная диаграмма микроархитектуры Mic-1 тракт данных (слева) блок управления (справа)
- 25. Управление микрокомандами Блок управления Самой большой и самой важной частью блока управления является управляющая память Будем
- 26. Управление микрокомандами Блок управления Управляющая память функционально представляет собой ПЗУ нужны собственные адресный регистр и регистр
- 27. Управление микрокомандами Блок управления Управляющая память функционально представляет собой ПЗУ нужны собственные адресный регистр и регистр
- 28. Управление микрокомандами Блок управления Регистр MIR, содержит те же шесть групп сигналов, которые показаны на слайде
- 29. Управление микрокомандами Схема работы Δw – в начале каждого цикла (фронт синхр-го сигнала) в регистр MIR
- 30. Управление микрокомандами Схема работы После следующего интервала, Δz, выходной сигнал схемы сдвига, пройдя через шину С,
- 31. Управление микрокомандами Вычисление адреса следующей команды Вычисление адреса следующей микрокоманды начинается после загрузки регистра MIR. Сначала
- 32. Управление микрокомандами Вычисление адреса следующей команды Назначение триггеров N и Z: после фронта сигнала (и вплоть
- 33. Управление микрокомандами Вычисление адреса следующей команды Текущая микрокоманда с адресом 0x73 содержит ноле NEXT ADDRESS -
- 34. Управление микрокомандами Вычисление адреса следующей команды Третий бит в поле JAM – JMPC. Если он установлен,
- 35. Управление микрокомандами Вычисление адреса следующей команды Возможность выполнения операции ИЛИ над MBR и NEXT_ADDRESS и сохранения
- 36. Управление микрокомандами Во время подцикла 1, который инициируется спадом сигнала, адрес, находящийся в регистре МРС, загружается
- 37. Пример архитектуры набора команд — IJVM Уровень архитектуры набора команд (ISA), которые должна интерпретировать микропрограмма машины
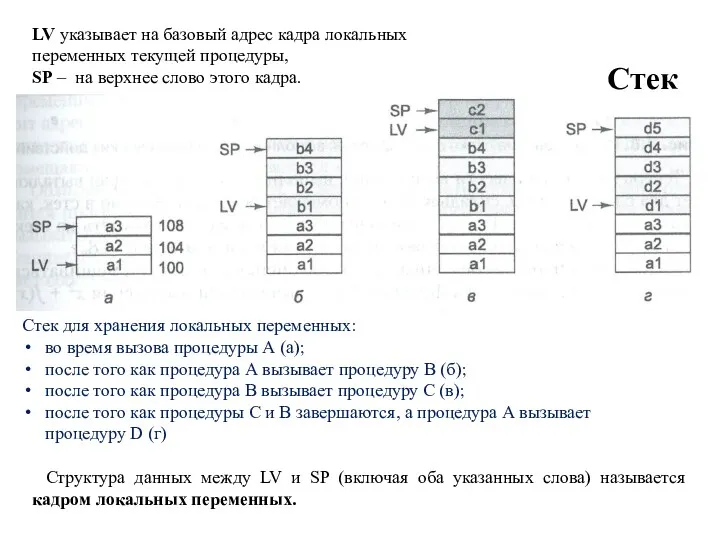
- 38. Стек Где должны храниться локальные переменные? Нельзя связать каждую переменную с абсолютным адресом в памяти, например
- 39. Стек Стек для хранения локальных переменных: во время вызова процедуры А (а); после того как процедура
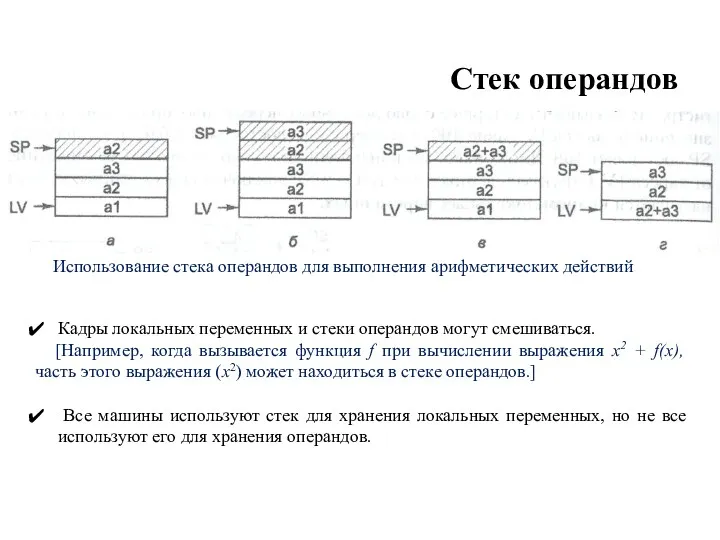
- 40. Стек операндов Кадры локальных переменных и стеки операндов могут смешиваться. [Например, когда вызывается функция f при
- 41. Модель памяти IJVM Память рассматриваем либо как массив из 4 294 967 296 байт (4 Гбайт),
- 42. Модель памяти IJVM Определены следующие области памяти: Набор констант недоступна для записи из IJVM-программы, состоит из
- 43. Модель памяти IJVM Определены следующие области памяти: Кадр локальных переменных предназначена для хранения переменных во время
- 44. Модель памяти IJVM Определены следующие области памяти: Стек операндов. не должен быть больше определенного размера, который
- 45. Модель памяти IJVM Определены следующие области памяти: Область процедур область памяти, в которой содержится программа. скрытый
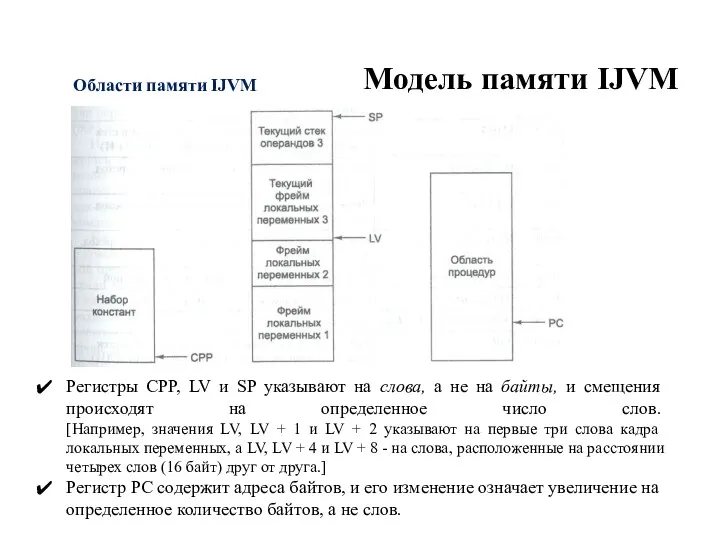
- 46. Модель памяти IJVM Области памяти IJVM Регистры CPP, LV и SP указывают на слова, а не
- 47. Набор IJVM-команд
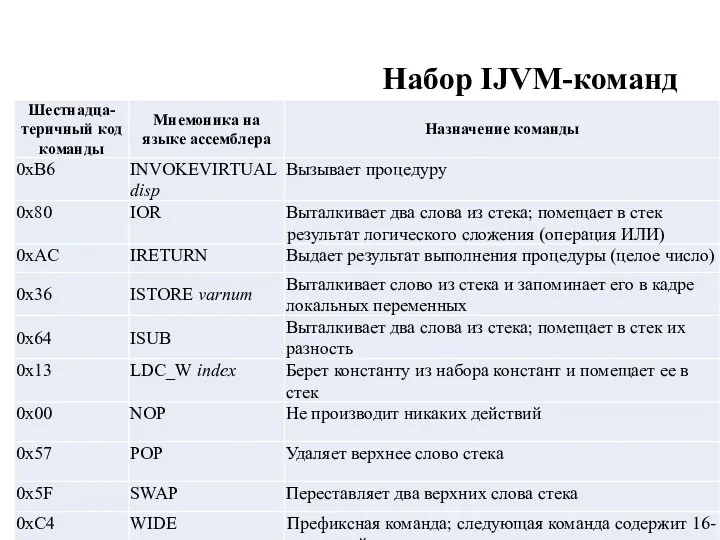
- 48. Набор IJVM-команд
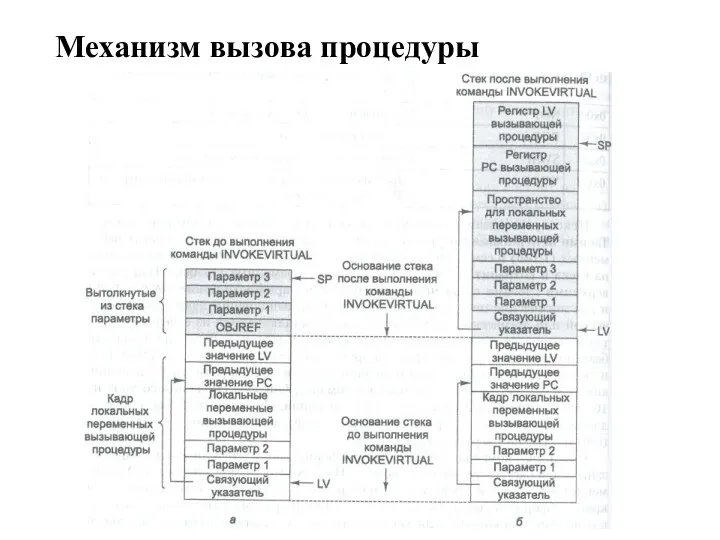
- 49. Механизм вызова процедуры
- 50. Механизм вызова процедуры Вызывающая программа помещает в стек сначала указатель на вызываемый объект (OBJREF), затем параметры
- 51. Механизм вызова процедуры Следующие 2 байта в области процедур представляют еще одно 16-разрядное целое число, задающее
- 52. Механизм вызова процедуры Перед вызовом процедуры Два байта без знака, которые следуют за кодом операции, используются
- 53. Механизм вызова процедуры
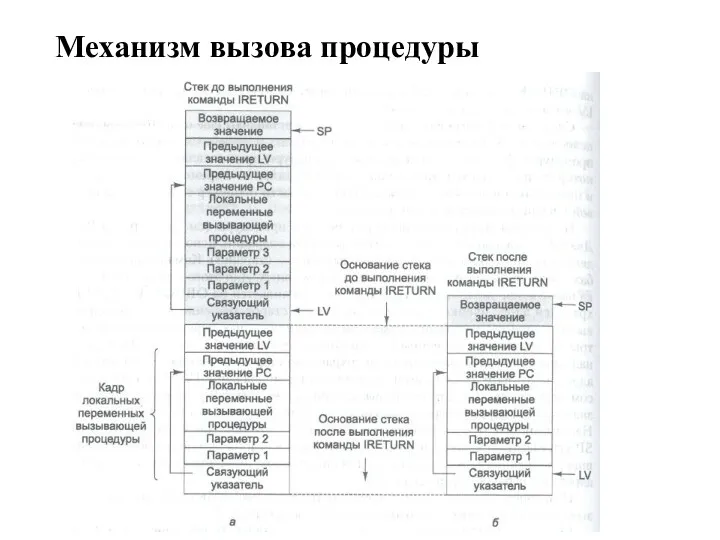
- 54. Механизм вызова процедуры Команда ireturn противоположна команде invokevirtual. Она освобождает память, используемую процедурой, а также возвращает
- 55. Разработка уровня микроархитектуры Быстродействие и стоимость Существуют три основных подхода, которые позволяют увеличить скорость выполнения операций:
- 56. Сокращение длины пути В процессоре Mic-1 используется минимум аппаратного обеспечения: 10 регистров простое АЛУ, продублированное 32
- 57. Слияние цикла интерпретатора с микропрограммой В микроархитектуре Mic-1 основной цикл состоит из микрокоманды, которая должна выполняться
- 58. Слияние цикла интерпретатора с микропрограммой Новая микропрограмма для выполнения команды POP Усовершенствованная микропрограмма для выполнения команды
- 59. Слияние цикла интерпретатора с микропрограммой 2. Переход от 2-шинной к 3-шинной архитектуре Можно подвести к АЛУ
- 60. Слияние цикла интерпретатора с микропрограммой Микропрограмма для выполнения команды ILOAD в 3-шинной архитектуре
- 61. Блок выборки команд В команде могут происходить следующие операции: значение PC пропускается через АЛУ и увеличивается
- 62. Блок выборки команд В микроархитектуре Mic-1 с АЛУ можно снять большую часть нагрузки, если создать независимый
- 63. Блок выборки команд Блок выборки команд может также объединять 8-разрядные и 16-разрядные операнды, чтобы они могли
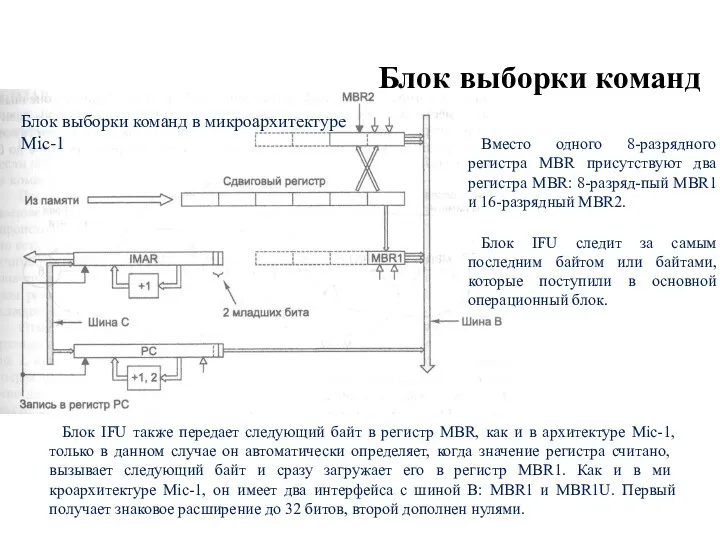
- 64. Блок выборки команд Блок выборки команд в микроархитектуре Mic-1 Вместо одного 8-разрядного регистра MBR присутствуют два
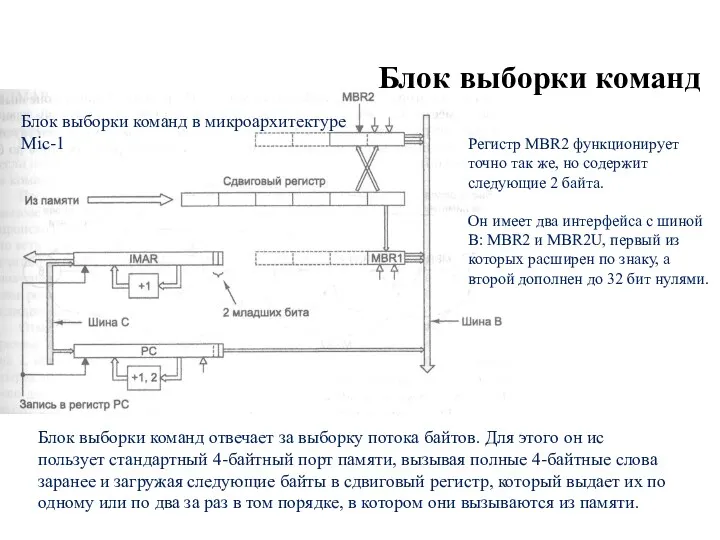
- 65. Блок выборки команд Блок выборки команд в микроархитектуре Mic-1 Регистр MBR2 функционирует точно так же, но
- 66. Блок выборки команд Задача сдвигового регистра — сохранить последовательность поступающих байтов для загрузки в регистры MBR1
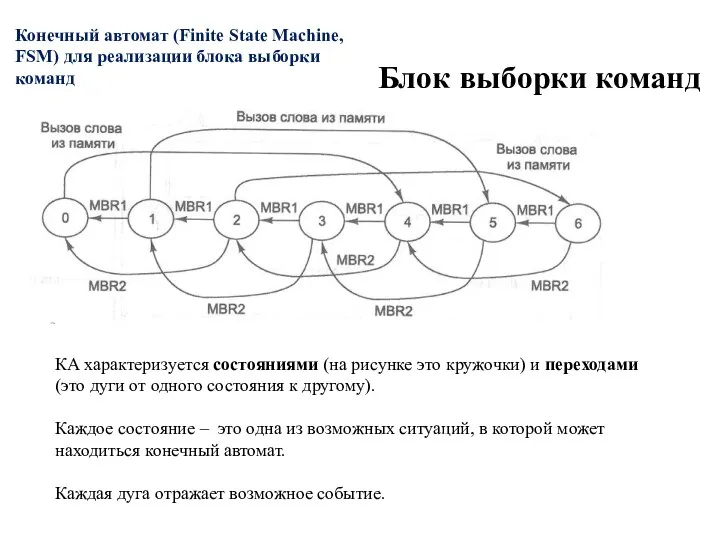
- 67. Блок выборки команд Конечный автомат (Finite State Machine, FSM) для реализации блока выборки команд КА характеризуется
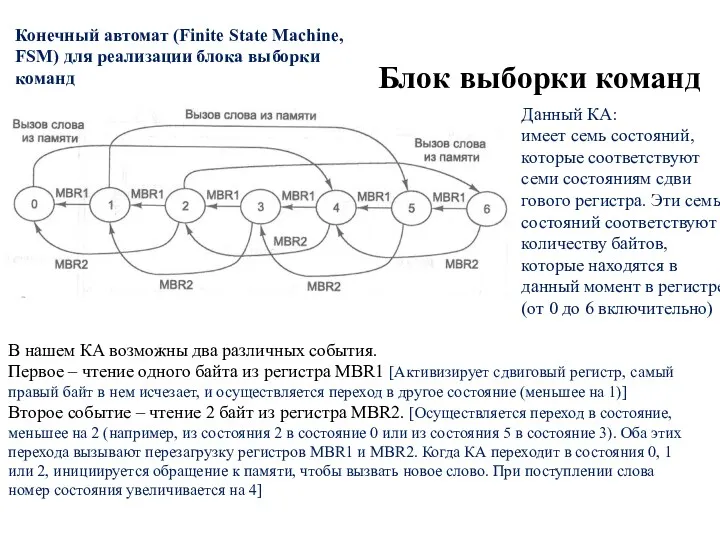
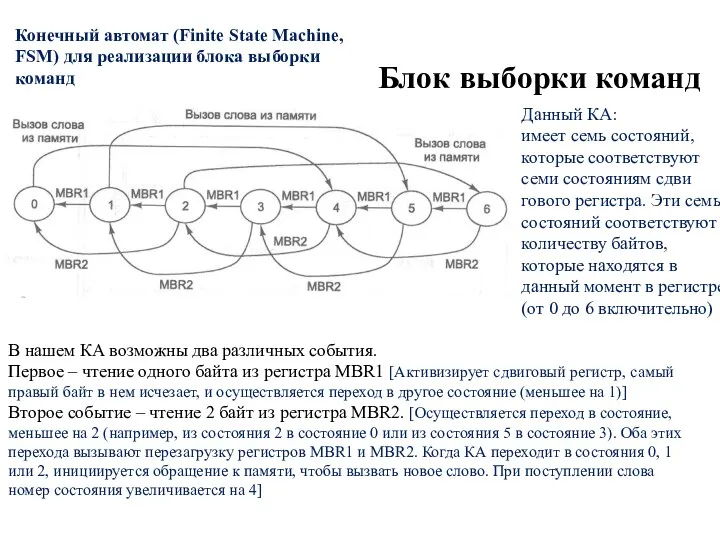
- 68. Блок выборки команд Конечный автомат (Finite State Machine, FSM) для реализации блока выборки команд В нашем
- 69. Блок выборки команд Конечный автомат (Finite State Machine, FSM) для реализации блока выборки команд В нашем
- 70. Блок выборки команд Для правильного функционирования схемы выборки команд (СВК) СВК должна блокироваться в том случае,
- 71. Блок выборки команд Для правильного функционирования схемы выборки команд (СВК) СВК должна блокироваться в том случае,
- 72. Блок выборки команд БВК имеет собственный регистр адреса ячейки памяти, называемый IMAR и используемый для обращения
- 73. Блок выборки команд Т.к. микропрограмма больше не увеличивает PC явным образом при вызове кода операции, блок
- 74. Блок выборки команд Существует две разных схемы инкремента, которые выполняют разные функции Регистр PC считает байты
- 75. Упреждающая выборка команд из памяти 3. Выборка команд из памяти осуществляется специализирован-ным функциональным блоком. БВК может
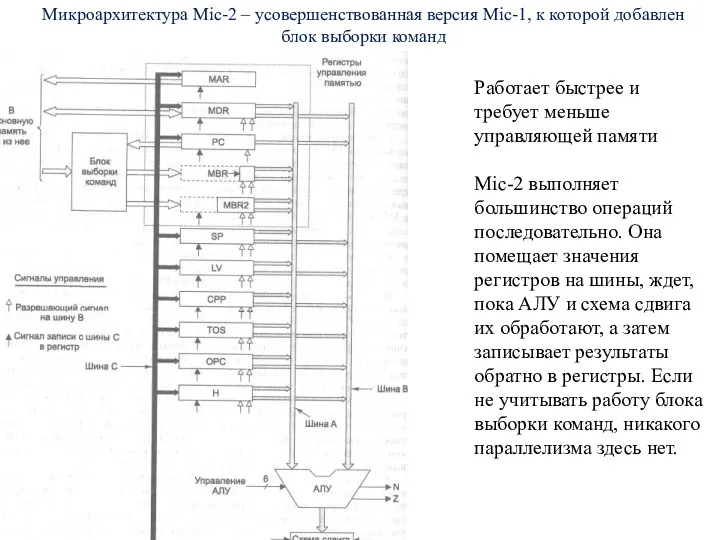
- 76. Работает быстрее и требует меньше управляющей памяти Mic-2 выполняет большинство операций последовательно. Она помещает значения регистров
- 77. Конвейерная конструкция Еще один вариант усовершенствования — увеличить степень параллелизма Цикл тракта данных объединяет три основных
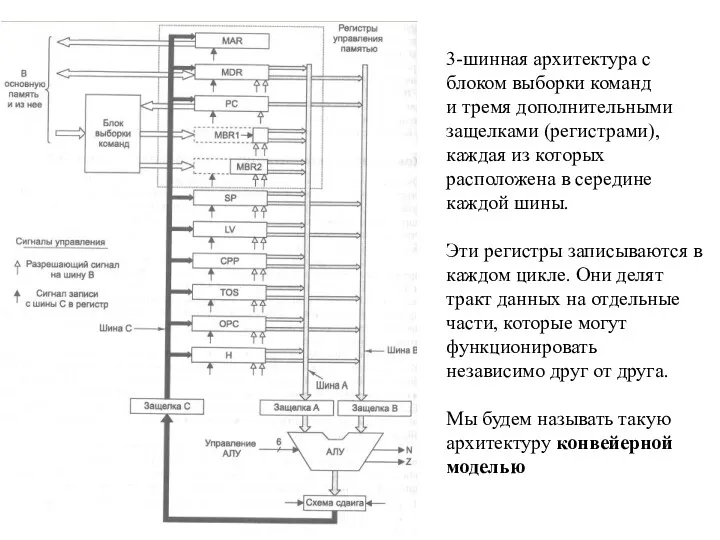
- 78. 3-шинная архитектура с блоком выборки команд и тремя дополнительными защелками (регистрами), каждая из которых расположена в
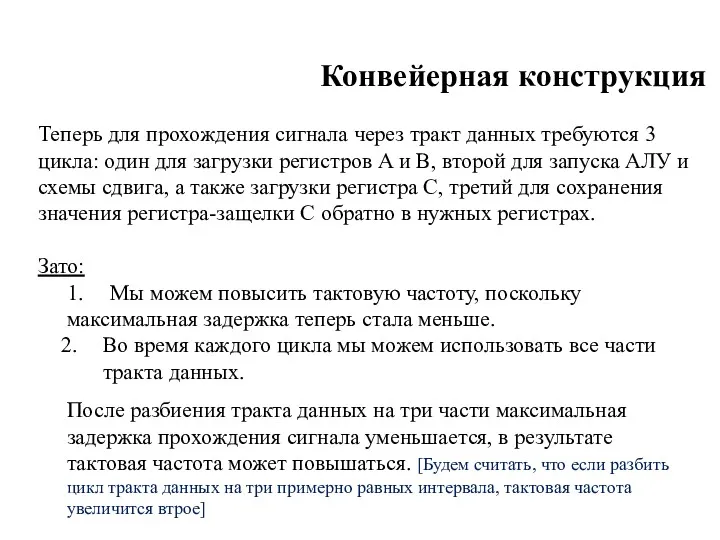
- 79. Конвейерная конструкция Теперь для прохождения сигнала через тракт данных требуются 3 цикла: один для загрузки регистров
- 80. Графическая иллюстрация работы конвейера
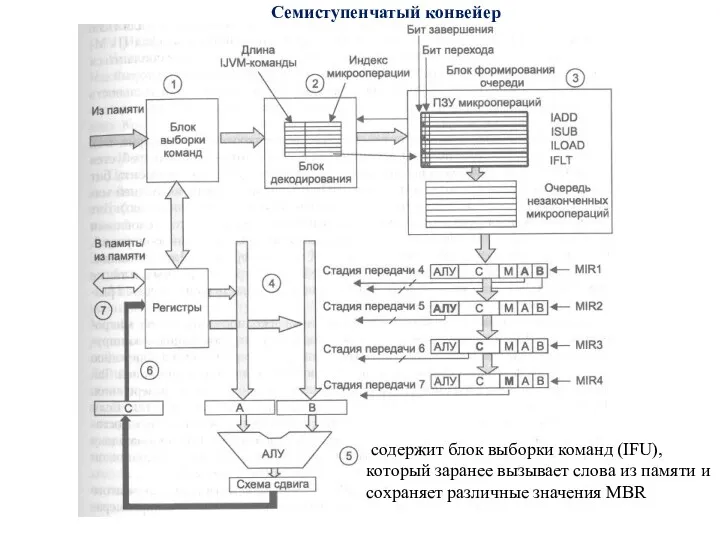
- 81. Семиступенчатый конвейер содержит блок выборки команд (IFU), который заранее вызывает слова из памяти и сохраняет различные
- 83. Скачать презентацию

Современные многоуровневые машины
Цифровой логический уровень
Уровень 0
Уровень микроархитектуры
Уровень 1
Уровень архитектуры набора команд
Уровень
Современные многоуровневые машины
Цифровой логический уровень
Уровень 0
Уровень микроархитектуры
Уровень 1
Уровень архитектуры набора команд
Уровень
Уровень микроархитектуры
Задача – интерпретация команд уровня архитектуры команд.
Строение уровня микроархитектуры зависит
Уровень микроархитектуры
Задача – интерпретация команд уровня архитектуры команд.
Строение уровня микроархитектуры зависит
Пример микроархитектуры
Общих принципов разработки уровня микроархитектуры не существует!!!
Пример: рассмотрим подмножество виртуальной
Пример микроархитектуры
Общих принципов разработки уровня микроархитектуры не существует!!!
Пример: рассмотрим подмножество виртуальной
Тракт данных
Тракт данных - это часть ЦП, состоящая из АЛУ, его
Тракт данных
Тракт данных - это часть ЦП, состоящая из АЛУ, его
Тракт данных
Некоторые комбинации сигналов АЛУ и соответствующие им функции
знак плюс (+)
Тракт данных
Некоторые комбинации сигналов АЛУ и соответствующие им функции
знак плюс (+)
Тракт данных
Содержание большинства регистров передается на шину В.
Выходной сигнал АЛУ управляет
Тракт данных
Содержание большинства регистров передается на шину В.
Выходной сигнал АЛУ управляет
Тракт данных
АЛУ содержит два входа для данных:
левый вход (А) [c
Тракт данных
АЛУ содержит два входа для данных:
левый вход (А) [c
Тракт данных
Операции чтения и записи регистра могут выполняться за один цикл:
Пример:
Тракт данных
Операции чтения и записи регистра могут выполняться за один цикл:
Пример:
Синхронизация тракта данных
Операции чтения и записи регистра могут выполняться за один
Синхронизация тракта данных
Операции чтения и записи регистра могут выполняться за один
Синхронизация тракта данных
Временная диаграмма цикла тракта данных
На спаде синхронизирующего сигнала:
Устанавливаются сигналы
Синхронизация тракта данных
Временная диаграмма цикла тракта данных
На спаде синхронизирующего сигнала:
Устанавливаются сигналы
Синхронизация тракта данных
В начале каждого цикла генерируется короткий импульс
на спаде
Синхронизация тракта данных
В начале каждого цикла генерируется короткий импульс
на спаде
Функционирование памяти
Взаимодействие с памятью:
через порт с пословной адресацией (32-разрядный)
Функционирование памяти
Взаимодействие с памятью:
через порт с пословной адресацией (32-разрядный)
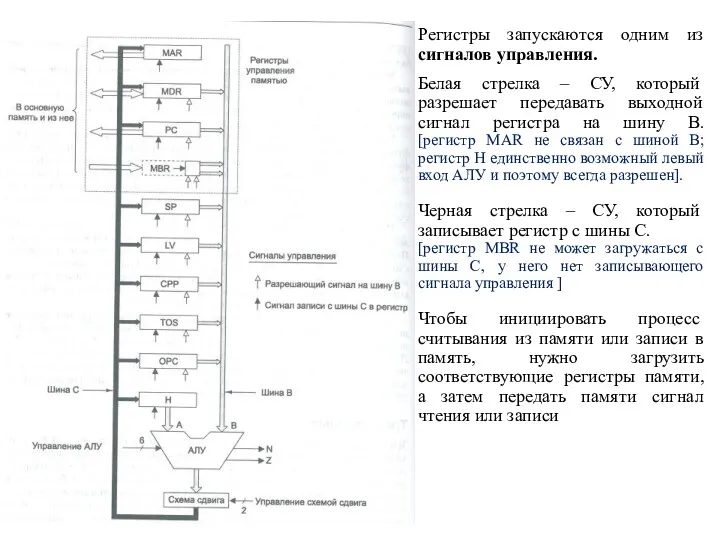
Регистры запускаются одним из сигналов управления.
Белая стрелка – СУ, который
Регистры запускаются одним из сигналов управления.
Белая стрелка – СУ, который
Функционирование памяти
Регистр MAR содержит адреса слов, таким образом, значения 0, 1,
Функционирование памяти
Регистр MAR содержит адреса слов, таким образом, значения 0, 1,
Функционирование памяти
Когда значение регистра MAR помещается на адресную шину, 32 бита
Функционирование памяти
Когда значение регистра MAR помещается на адресную шину, 32 бита
Функционирование памяти
Данные, считанные из памяти через 8-разрядный порт, сохраняются в 8-разрядном
Функционирование памяти
Данные, считанные из памяти через 8-разрядный порт, сохраняются в 8-разрядном
Функционирование памяти
Другой способ превращения 8-разрядного регистра MBR в 32-разрядное слово -
Функционирование памяти
Другой способ превращения 8-разрядного регистра MBR в 32-разрядное слово -
Функционирование памяти
Другой способ превращения 8-разрядного регистра MBR в 32-разрядное слово -
Функционирование памяти
Другой способ превращения 8-разрядного регистра MBR в 32-разрядное слово -
Микрокоманды
Для управления ТД необходимо 29 сигналов
9 сигналов для записи данных с
Микрокоманды
Для управления ТД необходимо 29 сигналов
9 сигналов для записи данных с
Микрокоманды
Значения этих 29 сигналов управления определяют операции для одного цикла ТД.
Микрокоманды
Значения этих 29 сигналов управления определяют операции для одного цикла ТД.
Микрокоманды
формат микрокоманды
6 групп, содержащие 36 сигналов:
Addr – адрес следующей потенциальной микрокоманды;
JAM
Микрокоманды
формат микрокоманды
6 групп, содержащие 36 сигналов:
Addr – адрес следующей потенциальной микрокоманды;
JAM
Управление микрокомандами
Контроллер последовательности отвечает за последовательность операций, необходимых для выполнения одной
Управление микрокомандами
Контроллер последовательности отвечает за последовательность операций, необходимых для выполнения одной
Полная диаграмма микроархитектуры Mic-1
тракт данных (слева)
блок управления (справа)
Полная диаграмма микроархитектуры Mic-1
тракт данных (слева)
блок управления (справа)
Управление микрокомандами
Блок управления
Самой большой и самой важной частью блока управления является
Управление микрокомандами
Блок управления
Самой большой и самой важной частью блока управления является
Управление микрокомандами
Блок управления
Управляющая память функционально представляет собой ПЗУ
нужны собственные адресный регистр
Управление микрокомандами
Блок управления
Управляющая память функционально представляет собой ПЗУ
нужны собственные адресный регистр
Управление микрокомандами
Блок управления
Управляющая память функционально представляет собой ПЗУ
нужны собственные адресный регистр
Управление микрокомандами
Блок управления
Управляющая память функционально представляет собой ПЗУ
нужны собственные адресный регистр
Управление микрокомандами
Блок управления
Регистр MIR, содержит те же шесть групп сигналов, которые
Управление микрокомандами
Блок управления
Регистр MIR, содержит те же шесть групп сигналов, которые
Управление микрокомандами
Схема работы
Δw – в начале каждого цикла (фронт синхр-го сигнала)
Управление микрокомандами
Схема работы
Δw – в начале каждого цикла (фронт синхр-го сигнала)
Управление микрокомандами
Схема работы
После следующего интервала, Δz, выходной сигнал схемы сдвига, пройдя
Управление микрокомандами
Схема работы
После следующего интервала, Δz, выходной сигнал схемы сдвига, пройдя
Управление микрокомандами
Вычисление адреса следующей команды
Вычисление адреса следующей микрокоманды начинается после загрузки
Управление микрокомандами
Вычисление адреса следующей команды
Вычисление адреса следующей микрокоманды начинается после загрузки
Управление микрокомандами
Вычисление адреса следующей команды
Назначение триггеров N и Z:
после фронта сигнала
Управление микрокомандами
Вычисление адреса следующей команды
Назначение триггеров N и Z:
после фронта сигнала
Управление микрокомандами
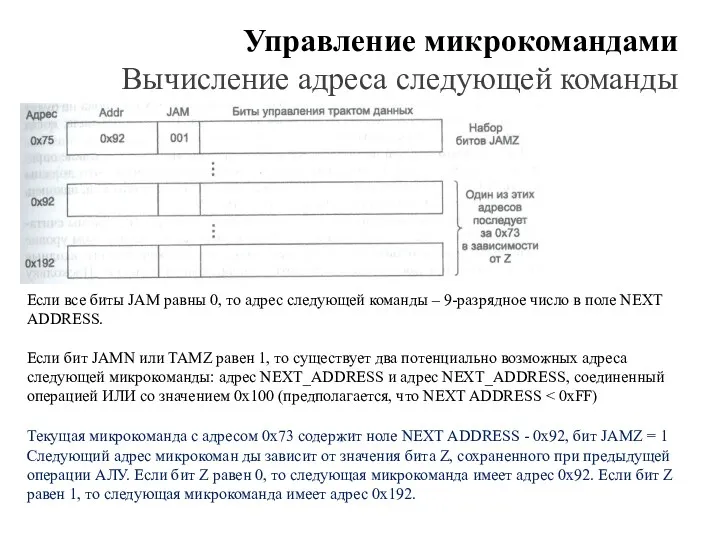
Вычисление адреса следующей команды
Текущая микрокоманда с адресом 0x73 содержит ноле
Управление микрокомандами
Вычисление адреса следующей команды
Текущая микрокоманда с адресом 0x73 содержит ноле
Управление микрокомандами
Вычисление адреса следующей команды
Третий бит в поле JAM – JMPC.
Управление микрокомандами
Вычисление адреса следующей команды
Третий бит в поле JAM – JMPC.
Управление микрокомандами
Вычисление адреса следующей команды
Возможность выполнения операции ИЛИ над MBR и
Управление микрокомандами
Вычисление адреса следующей команды
Возможность выполнения операции ИЛИ над MBR и
Управление микрокомандами
Во время подцикла 1, который инициируется спадом сигнала, адрес, находящийся
Управление микрокомандами
Во время подцикла 1, который инициируется спадом сигнала, адрес, находящийся
Пример архитектуры набора команд — IJVM
Уровень архитектуры набора команд (ISA), которые
Пример архитектуры набора команд — IJVM
Уровень архитектуры набора команд (ISA), которые
Стек
Где должны храниться локальные переменные?
Нельзя связать каждую переменную с абсолютным адресом
Стек
Где должны храниться локальные переменные?
Нельзя связать каждую переменную с абсолютным адресом
Стек
Стек для хранения локальных переменных:
во время вызова процедуры А (а);
после
Стек
Стек для хранения локальных переменных:
во время вызова процедуры А (а);
после
Стек операндов
Кадры локальных переменных и стеки операндов могут смешиваться.
[Например,
Стек операндов
Кадры локальных переменных и стеки операндов могут смешиваться.
[Например,
Модель памяти IJVM
Память рассматриваем либо как массив из 4 294 967
Модель памяти IJVM
Память рассматриваем либо как массив из 4 294 967
Модель памяти IJVM
Определены следующие области памяти:
Набор констант
недоступна для записи
Модель памяти IJVM
Определены следующие области памяти:
Набор констант
недоступна для записи
Модель памяти IJVM
Определены следующие области памяти:
Кадр локальных переменных
предназначена для хранения переменных
Модель памяти IJVM
Определены следующие области памяти:
Кадр локальных переменных
предназначена для хранения переменных
Модель памяти IJVM
Определены следующие области памяти:
Стек операндов.
не должен быть больше определенного
Модель памяти IJVM
Определены следующие области памяти:
Стек операндов.
не должен быть больше определенного
Модель памяти IJVM
Определены следующие области памяти:
Область процедур
область памяти, в которой содержится
Модель памяти IJVM
Определены следующие области памяти:
Область процедур
область памяти, в которой содержится
Модель памяти IJVM
Области памяти IJVM
Регистры CPP, LV и SP указывают на
Модель памяти IJVM
Области памяти IJVM
Регистры CPP, LV и SP указывают на
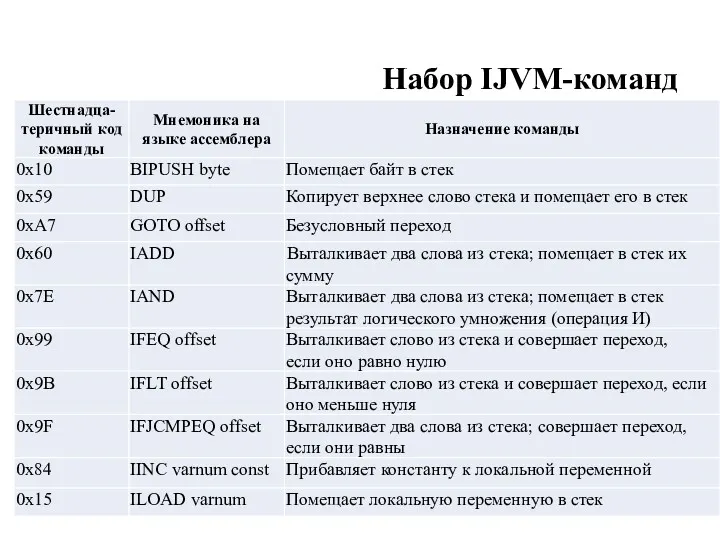
Набор IJVM-команд
Набор IJVM-команд
Набор IJVM-команд
Набор IJVM-команд
Механизм вызова процедуры
Механизм вызова процедуры
Механизм вызова процедуры
Вызывающая программа помещает в стек сначала указатель на
Механизм вызова процедуры
Вызывающая программа помещает в стек сначала указатель на
Механизм вызова процедуры
Следующие 2 байта в области процедур представляют еще
Механизм вызова процедуры
Следующие 2 байта в области процедур представляют еще
Механизм вызова процедуры
Перед вызовом процедуры
Два байта без знака, которые
Механизм вызова процедуры
Перед вызовом процедуры
Два байта без знака, которые
Механизм вызова процедуры
Механизм вызова процедуры
Механизм вызова процедуры
Команда ireturn противоположна команде invokevirtual. Она освобождает память,
Механизм вызова процедуры
Команда ireturn противоположна команде invokevirtual. Она освобождает память,
Разработка уровня микроархитектуры
Быстродействие и стоимость
Существуют три основных подхода, которые позволяют увеличить
Разработка уровня микроархитектуры
Быстродействие и стоимость
Существуют три основных подхода, которые позволяют увеличить
Сокращение длины пути
В процессоре Mic-1 используется минимум аппаратного обеспечения:
10 регистров
простое
Сокращение длины пути
В процессоре Mic-1 используется минимум аппаратного обеспечения:
10 регистров
простое
Слияние цикла интерпретатора с микропрограммой
В микроархитектуре Mic-1 основной цикл состоит из
Слияние цикла интерпретатора с микропрограммой
В микроархитектуре Mic-1 основной цикл состоит из
Слияние цикла интерпретатора с микропрограммой
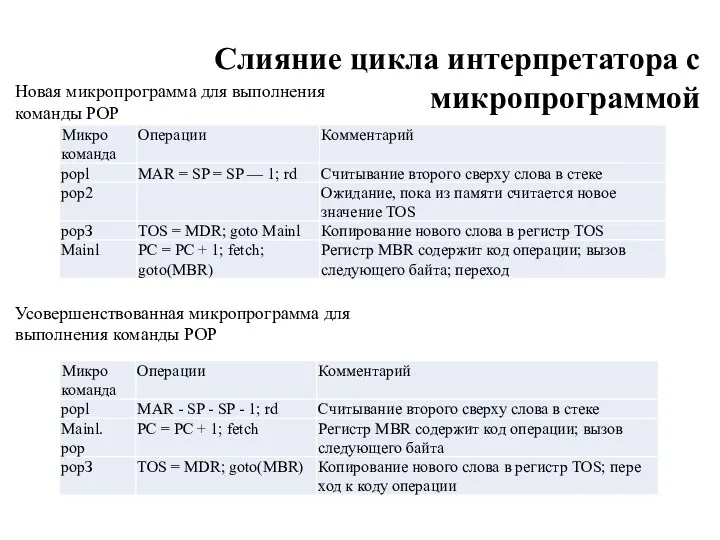
Новая микропрограмма для выполнения команды POP
Усовершенствованная микропрограмма
Слияние цикла интерпретатора с микропрограммой
Новая микропрограмма для выполнения команды POP
Усовершенствованная микропрограмма
Слияние цикла интерпретатора с микропрограммой
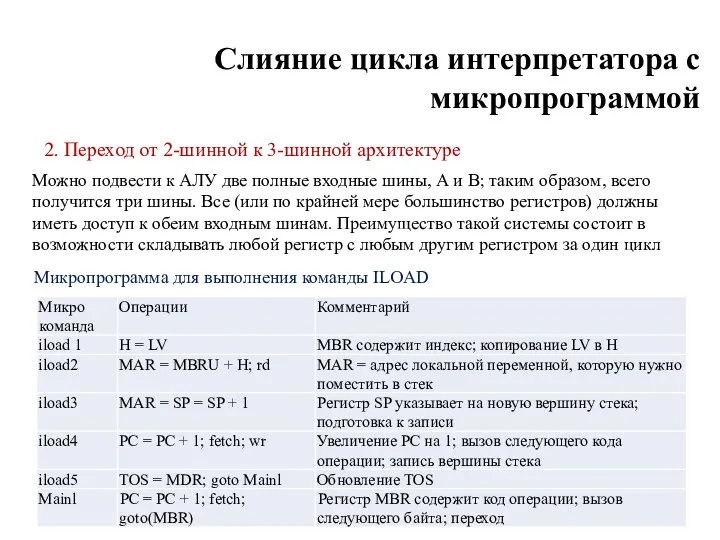
2. Переход от 2-шинной к 3-шинной архитектуре
Можно
Слияние цикла интерпретатора с микропрограммой
2. Переход от 2-шинной к 3-шинной архитектуре
Можно
Слияние цикла интерпретатора с микропрограммой
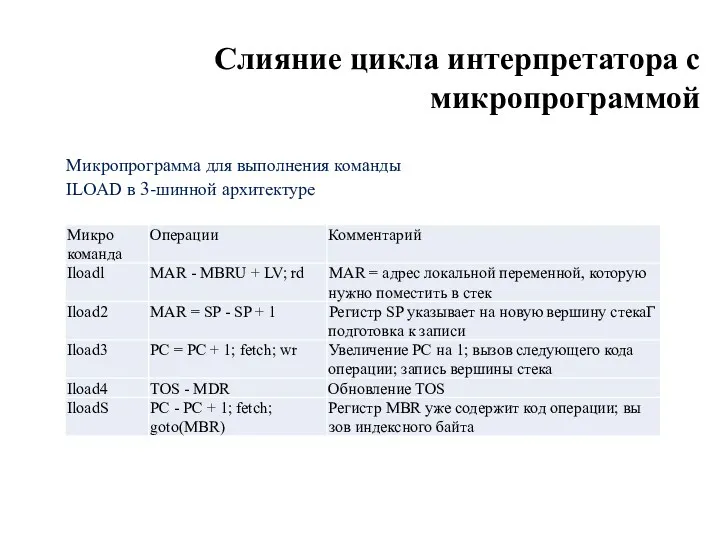
Микропрограмма для выполнения команды ILOAD в 3-шинной
Слияние цикла интерпретатора с микропрограммой
Микропрограмма для выполнения команды ILOAD в 3-шинной
Блок выборки команд
В команде могут происходить следующие операции:
значение PC пропускается через
Блок выборки команд
В команде могут происходить следующие операции:
значение PC пропускается через
Блок выборки команд
В микроархитектуре Mic-1 с АЛУ можно снять большую часть
Блок выборки команд
В микроархитектуре Mic-1 с АЛУ можно снять большую часть
Блок выборки команд
Блок выборки команд может также объединять 8-разрядные и 16-разрядные
Блок выборки команд
Блок выборки команд может также объединять 8-разрядные и 16-разрядные
Блок выборки команд
Блок выборки команд в микроархитектуре Mic-1
Вместо одного 8-разрядного регистра
Блок выборки команд
Блок выборки команд в микроархитектуре Mic-1
Вместо одного 8-разрядного регистра
Блок выборки команд
Блок выборки команд в микроархитектуре Mic-1
Регистр MBR2 функционирует точно
Блок выборки команд
Блок выборки команд в микроархитектуре Mic-1
Регистр MBR2 функционирует точно
Блок выборки команд
Задача сдвигового регистра — сохранить последовательность поступающих байтов для
Блок выборки команд
Задача сдвигового регистра — сохранить последовательность поступающих байтов для
Блок выборки команд
Конечный автомат (Finite State Machine, FSM) для реализации блока
Блок выборки команд
Конечный автомат (Finite State Machine, FSM) для реализации блока
Блок выборки команд
Конечный автомат (Finite State Machine, FSM) для реализации блока
Блок выборки команд
Конечный автомат (Finite State Machine, FSM) для реализации блока
Блок выборки команд
Конечный автомат (Finite State Machine, FSM) для реализации блока
Блок выборки команд
Конечный автомат (Finite State Machine, FSM) для реализации блока
Блок выборки команд
Для правильного функционирования схемы выборки команд (СВК)
СВК должна
Блок выборки команд
Для правильного функционирования схемы выборки команд (СВК)
СВК должна
Блок выборки команд
Для правильного функционирования схемы выборки команд (СВК)
СВК должна
Блок выборки команд
Для правильного функционирования схемы выборки команд (СВК)
СВК должна
Блок выборки команд
БВК имеет собственный регистр адреса ячейки памяти, называемый IMAR
Блок выборки команд
БВК имеет собственный регистр адреса ячейки памяти, называемый IMAR
Блок выборки команд
Т.к. микропрограмма больше не увеличивает PC явным образом при
Блок выборки команд
Т.к. микропрограмма больше не увеличивает PC явным образом при
Блок выборки команд
Существует две разных схемы инкремента, которые выполняют разные функции
Регистр
Блок выборки команд
Существует две разных схемы инкремента, которые выполняют разные функции
Регистр
Упреждающая выборка команд из памяти
3. Выборка команд из памяти осуществляется специализирован-ным
Упреждающая выборка команд из памяти
3. Выборка команд из памяти осуществляется специализирован-ным
Работает быстрее и требует меньше управляющей памяти
Mic-2 выполняет большинство операций последовательно.
Работает быстрее и требует меньше управляющей памяти
Mic-2 выполняет большинство операций последовательно.
Конвейерная конструкция
Еще один вариант усовершенствования — увеличить степень параллелизма
Цикл тракта данных
Конвейерная конструкция
Еще один вариант усовершенствования — увеличить степень параллелизма
Цикл тракта данных
3-шинная архитектура с блоком выборки команд
и тремя дополнительными защелками (регистрами), каждая
3-шинная архитектура с блоком выборки команд и тремя дополнительными защелками (регистрами), каждая
Конвейерная конструкция
Теперь для прохождения сигнала через тракт данных требуются 3 цикла:
Конвейерная конструкция
Теперь для прохождения сигнала через тракт данных требуются 3 цикла:

Графическая иллюстрация работы конвейера
Графическая иллюстрация работы конвейера
Семиступенчатый конвейер
содержит блок выборки команд (IFU), который заранее вызывает
Семиступенчатый конвейер
содержит блок выборки команд (IFU), который заранее вызывает
 Үлестірілген жүйелер
Үлестірілген жүйелер Теоретическое моделирование перевода
Теоретическое моделирование перевода Программирование на языке Паскаль. Основы
Программирование на языке Паскаль. Основы Использование коммуникационных возможностей официального сайта организации, реализация принципов доступности информации
Использование коммуникационных возможностей официального сайта организации, реализация принципов доступности информации Математическая логика (Булева алгебра)
Математическая логика (Булева алгебра) Логика и алгоритмы
Логика и алгоритмы Гипертекстовые информационные технологии
Гипертекстовые информационные технологии Caching Architectures and Graphics Processing
Caching Architectures and Graphics Processing Data Modeling and Databases Lab 3: Introduction to SQL
Data Modeling and Databases Lab 3: Introduction to SQL Представление числовой информации с помощью систем счисления
Представление числовой информации с помощью систем счисления Типы алгоритмических структур
Типы алгоритмических структур Файл и файловая система. Решение задач
Файл и файловая система. Решение задач Ювелирный магазин 1С:Розница 8
Ювелирный магазин 1С:Розница 8 Моделювання бізнес-процесів лісозаготівлі
Моделювання бізнес-процесів лісозаготівлі Устройство компьютера
Устройство компьютера Организация пространства устройства ввода и вывода
Организация пространства устройства ввода и вывода 1С:Документооборот
1С:Документооборот Компьютерная графика и анимация LOGO. Внеаудиторная работа №9
Компьютерная графика и анимация LOGO. Внеаудиторная работа №9 Информационные технологии обучения математике
Информационные технологии обучения математике Создание веб-сайтов
Создание веб-сайтов Кодирование звуковой информации
Кодирование звуковой информации Хранение информации. Память человека и память человечества. Оперативная и долговременная память. Файлы и папки. (5 класс)
Хранение информации. Память человека и память человечества. Оперативная и долговременная память. Файлы и папки. (5 класс) Overview of apps and web sites for language learning
Overview of apps and web sites for language learning Visual Studio 2008. Overview
Visual Studio 2008. Overview Уровни тестирования программного обеспечения
Уровни тестирования программного обеспечения Новости в Молдове. Новости в мире
Новости в Молдове. Новости в мире Lifebuilding Планирование
Lifebuilding Планирование Аддитивные технологии: 3D-печать
Аддитивные технологии: 3D-печать