- Варианты задач оптимизации

Содержание
- 2. В широком смысле общая задача оптимизации параметров систем автоматизации заключается в поиске экстремума критерия (целевой функции)
- 3. Основные методы решения задач оптимизации Математическое программирование Линейное программирование Нелинейное программирование Дискретное программирование Для решения большинства
- 4. Двоичные переменные Задачи с дискретными переменными Задача стохастического программирования Детерминированный эквивалент стохастической задачи Оптимизация при недетерминированных
- 5. Данный метод решает задачи, в которых искомые переменные могут принимать не любые целые значения, а только
- 6. Если в оптимальное решение должен входить один из двух вариантов, то сумма переменных: Если в оптимальное
- 7. Этот метод используется для решения оптимизационных задач со случайной исходной информацией. Например, мощности нагрузок в системе
- 8. Пре решении оптимизационных задач все искомые переменные или их часть должны принимать только значения целых чисел.
- 9. Целочисленная переменная x имеет 4 значения (x=0,1,2,3), а непрерывная переменная – бесконечное количество. Поэтому, попытка решить
- 10. В ряде практических оптимизационных задач заранее известен набор допустимых решений, из которых требуется выбрать оптимальное решение.
- 11. Составить математическую модель для определения в схеме электроснабжения оптимального узла установки компенсирующего устройства, заданной мощности. Критерий
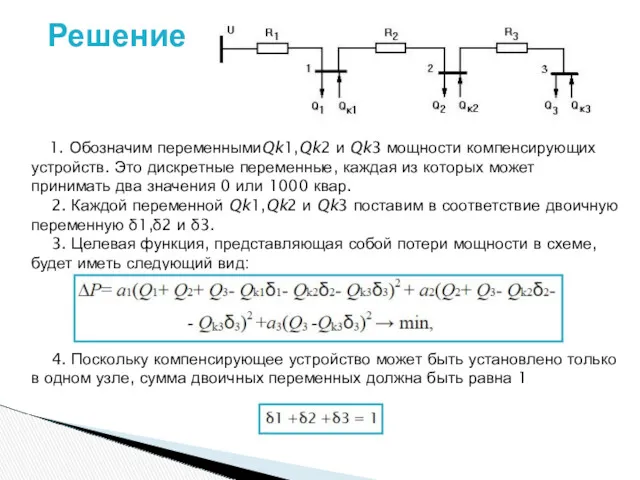
- 12. Решение 1. Обозначим переменнымиQk1,Qk2 и Qk3 мощности компенсирующих устройств. Это дискретные переменные, каждая из которых может
- 13. 5. Величина дискретной переменной Qki будет зависеть от значения соответствующей двоичной переменной δi. Переменная Qki =Qk
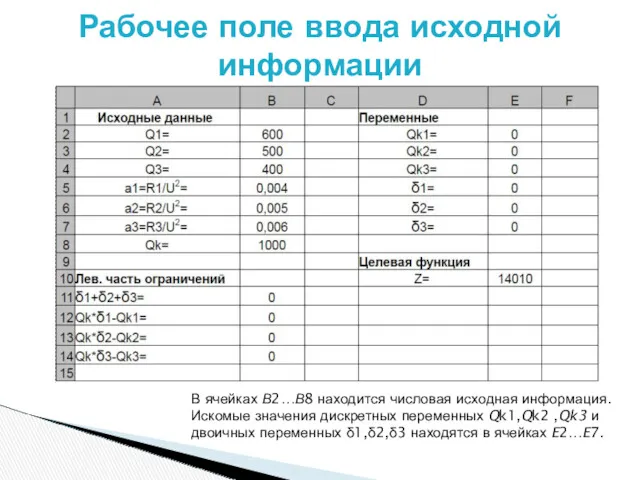
- 14. Рабочее поле ввода исходной информации В ячейках В2…В8 находится числовая исходная информация. Искомые значения дискретных переменных
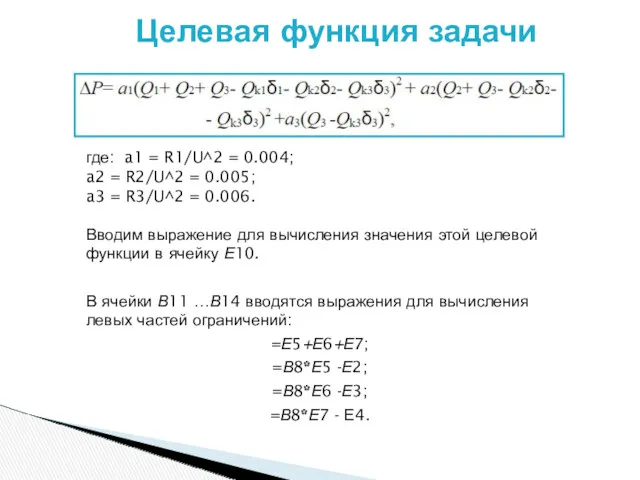
- 15. Целевая функция задачи где: a1 = R1/U^2 = 0.004; a2 = R2/U^2 = 0.005; a3 =
- 16. В диалоговом окне «Поиск решения»: устанавливается адрес ячейки целевой функции Е10; отмечается, что ищется минимальное значение
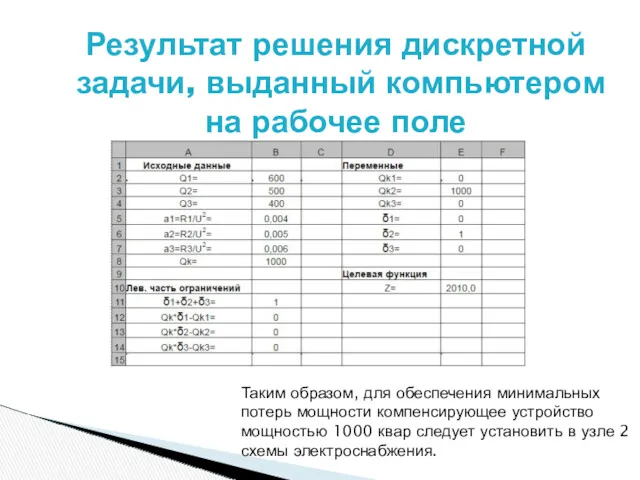
- 17. Результат решения дискретной задачи, выданный компьютером на рабочее поле Таким образом, для обеспечения минимальных потерь мощности
- 19. Скачать презентацию
В широком смысле общая задача оптимизации параметров систем автоматизации заключается в
В широком смысле общая задача оптимизации параметров систем автоматизации заключается в
Основные методы решения задач оптимизации
Математическое программирование
Линейное программирование
Нелинейное
Основные методы решения задач оптимизации
Математическое программирование
Линейное программирование
Нелинейное
Двоичные переменные
Задачи с дискретными переменными
Задача стохастического программирования
Детерминированный эквивалент стохастической задачи
Оптимизация при
Двоичные переменные
Задачи с дискретными переменными
Задача стохастического программирования
Детерминированный эквивалент стохастической задачи
Оптимизация при
Данный метод решает задачи, в которых искомые переменные могут принимать не
Данный метод решает задачи, в которых искомые переменные могут принимать не
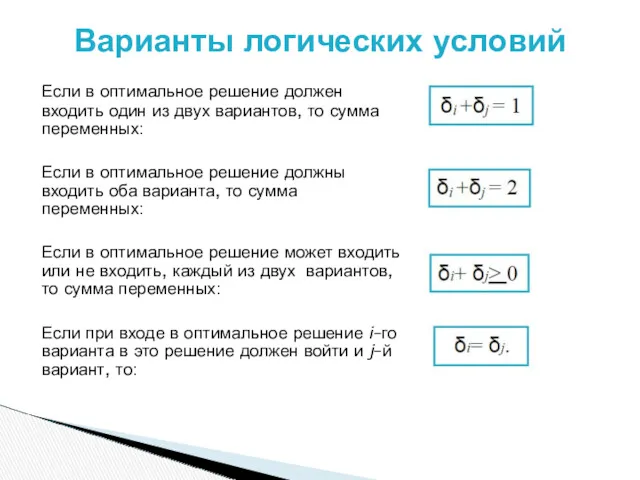
Если в оптимальное решение должен входить один из двух вариантов, то
Если в оптимальное решение должен входить один из двух вариантов, то
Этот метод используется для решения оптимизационных задач со случайной исходной информацией.
Например,
Этот метод используется для решения оптимизационных задач со случайной исходной информацией.
Например,
Пре решении оптимизационных задач все искомые переменные или их часть должны
Пре решении оптимизационных задач все искомые переменные или их часть должны
Целочисленная переменная x имеет 4 значения (x=0,1,2,3), а непрерывная переменная –
Целочисленная переменная x имеет 4 значения (x=0,1,2,3), а непрерывная переменная –
В ряде практических оптимизационных задач заранее известен набор допустимых решений, из
В ряде практических оптимизационных задач заранее известен набор допустимых решений, из
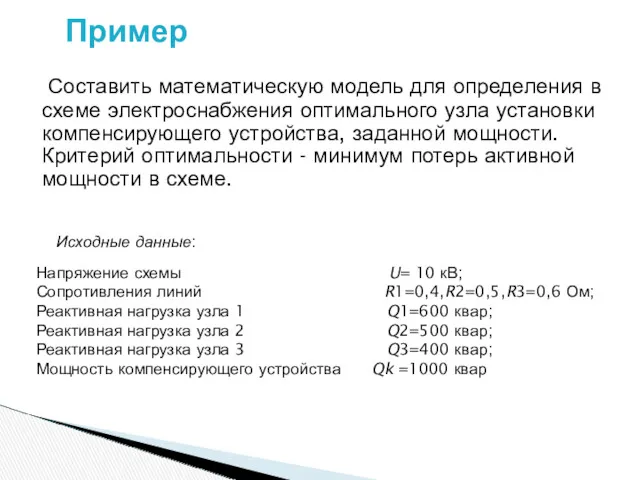
Составить математическую модель для определения в схеме электроснабжения оптимального узла установки
Составить математическую модель для определения в схеме электроснабжения оптимального узла установки
Решение
1. Обозначим переменнымиQk1,Qk2 и Qk3 мощности компенсирующих устройств. Это дискретные переменные, каждая
Решение
1. Обозначим переменнымиQk1,Qk2 и Qk3 мощности компенсирующих устройств. Это дискретные переменные, каждая
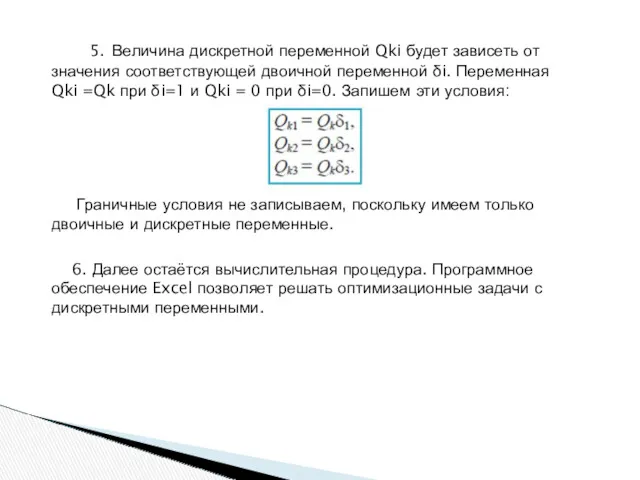
5. Величина дискретной переменной Qki будет зависеть от значения соответствующей двоичной переменной
5. Величина дискретной переменной Qki будет зависеть от значения соответствующей двоичной переменной
Рабочее поле ввода исходной информации
В ячейках В2…В8 находится числовая исходная информация.
Рабочее поле ввода исходной информации
В ячейках В2…В8 находится числовая исходная информация.
Целевая функция задачи
где: a1 = R1/U^2 = 0.004;
a2 = R2/U^2 =
Целевая функция задачи
где: a1 = R1/U^2 = 0.004;
a2 = R2/U^2 =

В диалоговом окне «Поиск решения»: устанавливается адрес ячейки целевой функции Е10; отмечается,
В диалоговом окне «Поиск решения»: устанавливается адрес ячейки целевой функции Е10; отмечается,
Результат решения дискретной задачи, выданный компьютером на рабочее поле
Таким образом, для
Результат решения дискретной задачи, выданный компьютером на рабочее поле
Таким образом, для
 Стандартизация в области информационных технологий
Стандартизация в области информационных технологий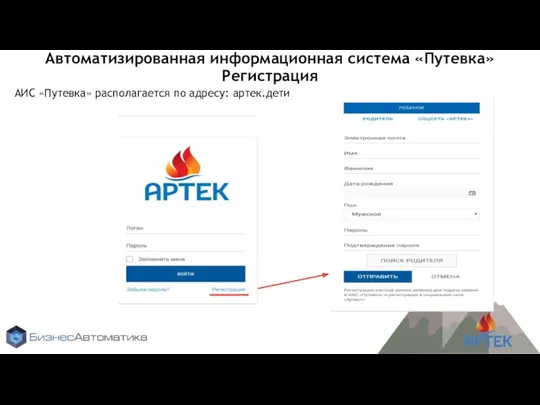 Автоматизированная информационная система Путевка. Регистрация
Автоматизированная информационная система Путевка. Регистрация Создание виртуальной машины VirtualBox
Создание виртуальной машины VirtualBox Ввод информации в память компьютера
Ввод информации в память компьютера Классификация ЭВМ
Классификация ЭВМ Алгоритмы с возвращением, их реализация с помощью рекурсий и динамических структур
Алгоритмы с возвращением, их реализация с помощью рекурсий и динамических структур Оператор перехода Goto. Цикл метки. Язык программирования Pascal
Оператор перехода Goto. Цикл метки. Язык программирования Pascal Исполнитель робот
Исполнитель робот Cmpe 466 computer graphics. A survey of graphics applications. (Chapter 1)
Cmpe 466 computer graphics. A survey of graphics applications. (Chapter 1) Пользовательский интерфейс и его разновидности
Пользовательский интерфейс и его разновидности Массивы. Операции с массивами
Массивы. Операции с массивами Information technologies in the professional sphere. Industrial ICT
Information technologies in the professional sphere. Industrial ICT Защита информации. Основные термины и определения
Защита информации. Основные термины и определения LDI Plus Presentation EN
LDI Plus Presentation EN Комп’ютерні мережі
Комп’ютерні мережі Операции и выражения. (Лекция 4)
Операции и выражения. (Лекция 4) Упрощенный прием РПО
Упрощенный прием РПО Бесплатные антивирусные программы
Бесплатные антивирусные программы Basic Switch. Setup
Basic Switch. Setup Формирование УУД при изучении графических и текстовых редакторов на уроках информатики и ИКТ
Формирование УУД при изучении графических и текстовых редакторов на уроках информатики и ИКТ Стандартны оформления программного кода
Стандартны оформления программного кода Совершенствование организации проектирования уникальных зданий на основе строительно-информационного моделирования
Совершенствование организации проектирования уникальных зданий на основе строительно-информационного моделирования Соглашение об уровне сервиса, или что такое SLA (Service Level Agreement)
Соглашение об уровне сервиса, или что такое SLA (Service Level Agreement) Информационные системы и технологии. Система высокого уровня CATIA V5 (продолжение). Лекция 9
Информационные системы и технологии. Система высокого уровня CATIA V5 (продолжение). Лекция 9 Электронный учебник по информатике
Электронный учебник по информатике Virtual Box - много маленьких машинок внутри одной
Virtual Box - много маленьких машинок внутри одной Автоматизированное проектирование ИС. (Лекция 5)
Автоматизированное проектирование ИС. (Лекция 5) MS DOS операциялық жүйе
MS DOS операциялық жүйе