- Вариационное моделирование

Содержание
- 2. Литература Курс высшей математики: Смирнов В.И. , 1-й т., М., Наука, 1974. – 480с. Курс высшей
- 3. План Параметры, ограничения и вариационные модели. Создание эскизов и проектирование сборок. Задача размещения геометрических объектов и
- 4. Параметры, ограничения и вариационные модели Параметры геометрической модели – это координаты и размеры ее элементов. Параметрические
- 5. Параметры, ограничения и вариационные модели В твердотельных моделях с CSG-деревом – модификация параметров реализуется путем полного
- 6. Параметры, ограничения и вариационные модели Геометрическое ограничение - это связывание точек, ребер и граней геометрической модели
- 7. Параметры, ограничения и вариационные модели Декларативная параметрическая модель с геометрическими ограничениями называется вариационной. Традиционный набор параметров
- 8. Создание эскизов и проектирование сборок Области использования вариационного моделирования в CAD-системах: создание плоских эскизов; создание трехмерных
- 9. Задача размещения геометрических объектов и ее характеристики Задача размещения геометрических объектов ( задача удовлетворения геометрическим ограничениям)
- 10. Задача размещения геометрических объектов и ее характеристики Набор объектов: точки, прямые, окружности, эллипсы и параметрические кривые.
- 11. Задача размещения геометрических объектов и ее характеристики Логическое ограничение инцидентности и параметрическое ограничение расстояния задаются между
- 12. Задача размещения геометрических объектов и ее характеристики Специальные виды ограничения - абсолютная и относительная фиксация. Абсолютная
- 13. Задача размещения геометрических объектов и ее характеристики Решением геометрической задачи является такое определение параметров ее объектов,
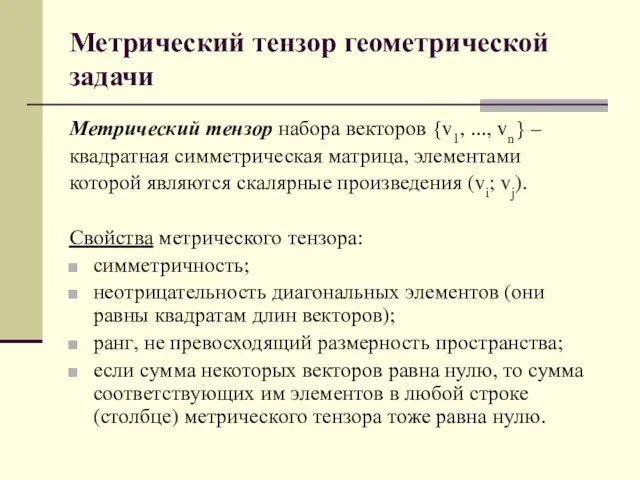
- 14. Задача размещения геометрических объектов и ее характеристики Свойства геометрической задачи: избыточность; сингулярность. Если удаление ограничения не
- 15. Вариационный геометрический решатель Программная компонента для решения геометрических задач, возникающих при вариационном моделировании, называется геометрическим решателем.
- 16. Вариационный геометрический решатель Большинство коммерческих систем используют DCM-решатель (Dimensional Constraint Manager) - разработка D-Cubed - дочерняя
- 17. Способы алгебраического моделирования геометрической задачи Способы решения геометрической задачи: Декартово моделирование; Недекартово моделирование; Относительное моделирование.
- 18. Способы алгебраического моделирования геометрической задачи Декартово моделирование: каждому объекту сопоставляется набор вещественных координат, которые полностью описывают
- 19. Способы алгебраического моделирования геометрической задачи Геометрическая задача Система алгебраических уравнений: количество неизвестных прямо пропорционально числу геометрических
- 20. Способы алгебраического моделирования геометрической задачи Относительное моделирование - связывание с каждым объектом не абсолютных, а относительных
- 21. Метрический тензор геометрической задачи Недекартово моделирование – использование понятий аффинного пространства и метрического тензора. Элементы трехмерного
- 22. Метрический тензор геометрической задачи Аффинное пространство: задается двумя непересекающимися множествами - точек и векторов; задается операцией
- 23. Метрический тензор геометрической задачи Метрический тензор набора векторов {v1, ..., vn} – квадратная симметрическая матрица, элементами
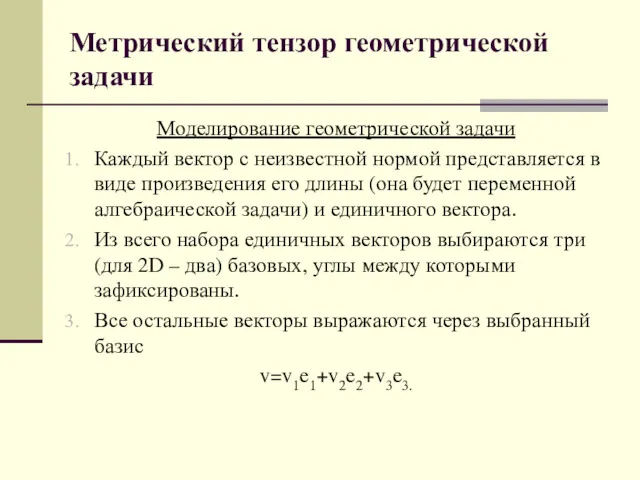
- 24. Метрический тензор геометрической задачи Моделирование геометрической задачи Каждый вектор с неизвестной нормой представляется в виде произведения
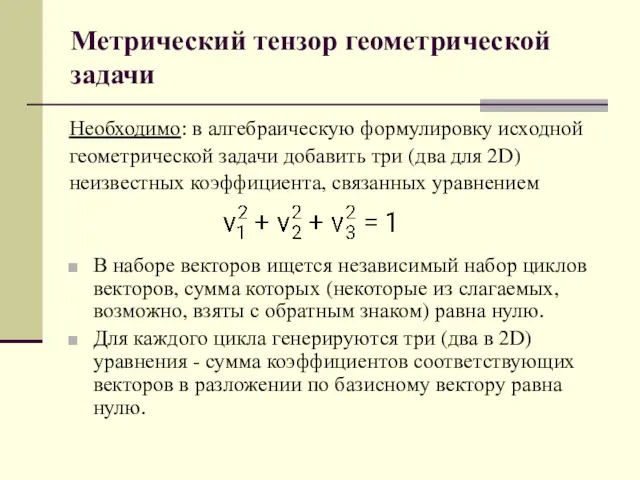
- 25. Метрический тензор геометрической задачи Необходимо: в алгебраическую формулировку исходной геометрической задачи добавить три (два для 2D)
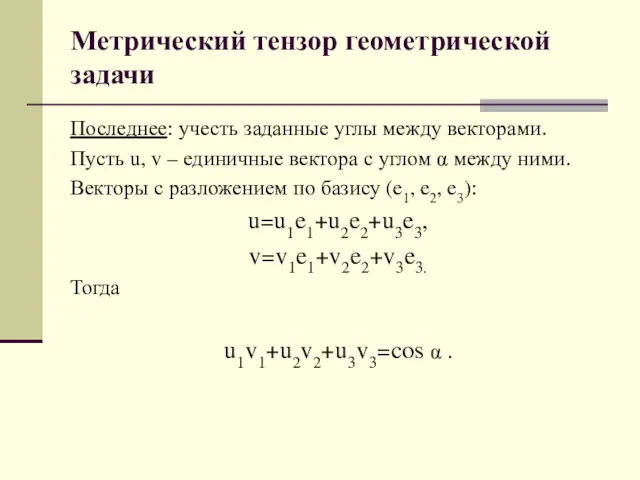
- 26. Метрический тензор геометрической задачи Последнее: учесть заданные углы между векторами. Пусть u, v – единичные вектора
- 28. Скачать презентацию
Литература
Курс высшей математики: Смирнов В.И. , 1-й т., М., Наука, 1974.
Литература
Курс высшей математики: Смирнов В.И. , 1-й т., М., Наука, 1974.
План
Параметры, ограничения и вариационные модели.
Создание эскизов и проектирование сборок.
Задача размещения геометрических
План
Параметры, ограничения и вариационные модели.
Создание эскизов и проектирование сборок.
Задача размещения геометрических
Параметры, ограничения и вариационные модели
Параметры геометрической модели – это координаты
Параметры, ограничения и вариационные модели
Параметры геометрической модели – это координаты
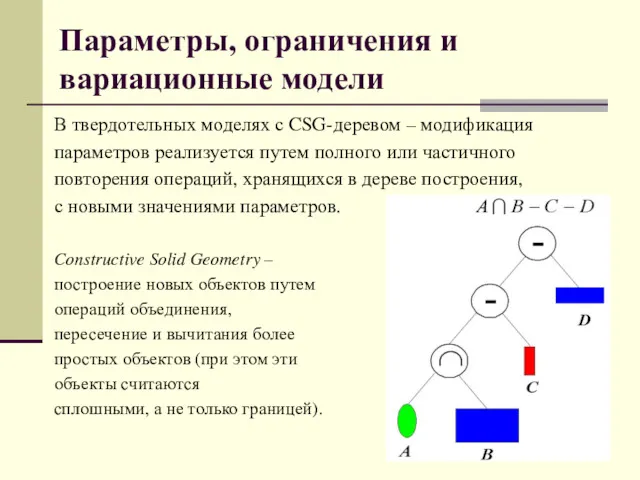
Параметры, ограничения и вариационные модели
В твердотельных моделях с CSG-деревом – модификация
Параметры, ограничения и вариационные модели
В твердотельных моделях с CSG-деревом – модификация
Параметры, ограничения и вариационные модели
Геометрическое ограничение - это связывание точек, ребер
Параметры, ограничения и вариационные модели
Геометрическое ограничение - это связывание точек, ребер
Параметры, ограничения и вариационные модели
Декларативная параметрическая модель с геометрическими
ограничениями называется
Параметры, ограничения и вариационные модели
Декларативная параметрическая модель с геометрическими
ограничениями называется
Создание эскизов и проектирование сборок
Области использования вариационного моделирования
в CAD-системах:
создание плоских эскизов;
создание
Создание эскизов и проектирование сборок
Области использования вариационного моделирования
в CAD-системах:
создание плоских эскизов;
создание
Задача размещения геометрических объектов и ее характеристики
Задача размещения геометрических объектов
Задача размещения геометрических объектов и ее характеристики
Задача размещения геометрических объектов
Задача размещения геометрических объектов и ее характеристики
Набор объектов: точки, прямые, окружности,
Задача размещения геометрических объектов и ее характеристики
Набор объектов: точки, прямые, окружности,
Задача размещения геометрических объектов и ее характеристики
Логическое ограничение инцидентности и параметрическое
Задача размещения геометрических объектов и ее характеристики
Логическое ограничение инцидентности и параметрическое
Задача размещения геометрических объектов и ее характеристики
Специальные виды ограничения - абсолютная
Задача размещения геометрических объектов и ее характеристики
Специальные виды ограничения - абсолютная
Задача размещения геометрических объектов и ее характеристики
Решением геометрической задачи является такое
Задача размещения геометрических объектов и ее характеристики
Решением геометрической задачи является такое
Задача размещения геометрических объектов и ее характеристики
Свойства геометрической задачи:
избыточность;
сингулярность.
Если удаление
Задача размещения геометрических объектов и ее характеристики
Свойства геометрической задачи:
избыточность;
сингулярность.
Если удаление
Вариационный геометрический решатель
Программная компонента для решения геометрических задач,
возникающих при вариационном
Вариационный геометрический решатель
Программная компонента для решения геометрических задач,
возникающих при вариационном
Вариационный геометрический решатель
Большинство коммерческих систем используют
DCM-решатель (Dimensional Constraint Manager) -
Вариационный геометрический решатель
Большинство коммерческих систем используют
DCM-решатель (Dimensional Constraint Manager) -
Способы алгебраического моделирования геометрической задачи
Способы решения геометрической задачи:
Декартово моделирование;
Недекартово моделирование;
Относительное моделирование.
Способы алгебраического моделирования геометрической задачи
Способы решения геометрической задачи:
Декартово моделирование;
Недекартово моделирование;
Относительное моделирование.
Способы алгебраического моделирования геометрической задачи
Декартово моделирование:
каждому объекту сопоставляется набор вещественных
Способы алгебраического моделирования геометрической задачи
Декартово моделирование:
каждому объекту сопоставляется набор вещественных

Способы алгебраического моделирования геометрической задачи
Геометрическая задача
Система алгебраических уравнений:
количество неизвестных прямо пропорционально
Способы алгебраического моделирования геометрической задачи
Геометрическая задача
Система алгебраических уравнений:
количество неизвестных прямо пропорционально
Способы алгебраического моделирования геометрической задачи
Относительное моделирование - связывание с каждым
объектом
Способы алгебраического моделирования геометрической задачи
Относительное моделирование - связывание с каждым
объектом
Метрический тензор геометрической задачи
Недекартово моделирование – использование понятий
аффинного пространства
Метрический тензор геометрической задачи
Недекартово моделирование – использование понятий
аффинного пространства
Метрический тензор геометрической задачи
Аффинное пространство:
задается двумя непересекающимися множествами - точек и
Метрический тензор геометрической задачи
Аффинное пространство:
задается двумя непересекающимися множествами - точек и
Метрический тензор геометрической задачи
Метрический тензор набора векторов {v1, ..., vn} –
Метрический тензор геометрической задачи
Метрический тензор набора векторов {v1, ..., vn} –
Метрический тензор геометрической задачи
Моделирование геометрической задачи
Каждый вектор с неизвестной нормой представляется
Метрический тензор геометрической задачи
Моделирование геометрической задачи
Каждый вектор с неизвестной нормой представляется
Метрический тензор геометрической задачи
Необходимо: в алгебраическую формулировку исходной
геометрической задачи добавить
Метрический тензор геометрической задачи
Необходимо: в алгебраическую формулировку исходной
геометрической задачи добавить
Метрический тензор геометрической задачи
Последнее: учесть заданные углы между векторами.
Пусть u, v
Метрический тензор геометрической задачи
Последнее: учесть заданные углы между векторами.
Пусть u, v
 Переход от инфологического моделирования к моделям данных и знаний. Логико-лингвистические модели представления знаний
Переход от инфологического моделирования к моделям данных и знаний. Логико-лингвистические модели представления знаний Управление 2D персонажем
Управление 2D персонажем Решение задач на использование циклических конструкций
Решение задач на использование циклических конструкций Система GPS моніторингу Агроконтроль
Система GPS моніторингу Агроконтроль Анализ современных подходов к разработке мобильных приложений на примере приложения: Дневник стрелка
Анализ современных подходов к разработке мобильных приложений на примере приложения: Дневник стрелка Типы сети. Классификация сетей. Принципы построения сетей
Типы сети. Классификация сетей. Принципы построения сетей Базы данных и SQL. Семинар 2
Базы данных и SQL. Семинар 2 Базовые информационные технологии: технология автоматизированного офиса, технологии баз данных
Базовые информационные технологии: технология автоматизированного офиса, технологии баз данных Эти люди изменили мир
Эти люди изменили мир Современные СМИ и их роль в формировании нравственного облика современного человека
Современные СМИ и их роль в формировании нравственного облика современного человека Обзор CAD-систем
Обзор CAD-систем Благотворительная организация - концепция LP
Благотворительная организация - концепция LP Игра Самый умный
Игра Самый умный Информационная картина мира
Информационная картина мира Алгоритмические языки и программирование
Алгоритмические языки и программирование Ідентифікація та аутентифікація користувачів (урок 7)
Ідентифікація та аутентифікація користувачів (урок 7) Медіавіконце. Вікіпедія і вікіпедисти
Медіавіконце. Вікіпедія і вікіпедисти Проектирование реляционной базы данных
Проектирование реляционной базы данных ERP-решения Фирмы 1С для Генерального директора. Редакция 1.3
ERP-решения Фирмы 1С для Генерального директора. Редакция 1.3 Сети и сетевое оборудование
Сети и сетевое оборудование Павлодарға қош келдіңіз ақпараттық web-сайт әзірлеу
Павлодарға қош келдіңіз ақпараттық web-сайт әзірлеу Моделирование. Модели и оригиналы
Моделирование. Модели и оригиналы Мозговой штурм. Брейн-ринг
Мозговой штурм. Брейн-ринг Рабочий стол. Управление компьютером с помощью мыши
Рабочий стол. Управление компьютером с помощью мыши Безопасность программных средств
Безопасность программных средств Родительству нужно учиться. Информационно-методический центр по родительскому образованию и просвещению
Родительству нужно учиться. Информационно-методический центр по родительскому образованию и просвещению Управление в логистических информационных системах (Информационные системы планирования и управления ресурсами предприятия)
Управление в логистических информационных системах (Информационные системы планирования и управления ресурсами предприятия) Процеси створення програмного забезпечення
Процеси створення програмного забезпечення