- Задачи нелинейного программирования

Содержание
- 2. Рассмотрим функцию f(X) на отрезке [a,b]. . а в f(x5)-глобальный максимум, f(x1), f(x3) – локальные максимумы.
- 3. Необходимое условие существования экстремума функции f(x) в точке x0 является равенство нулю градиента функции в этой
- 4. Методы решения задач НП
- 5. Аналитические методы Основаны на использовании необходимых и достаточных условий экстремумов функций. Для их использования необходимо, чтобы
- 6. Численные методы Для поиска экстремума функции, зависящей от 1-й переменной. Выделяется диапазон значений x , на
- 7. Покоординатные методы Отыскание экстремального значения функции по каждой из переменных.
- 8. Методы случайного поиска Выбирается любое допустимое решение. Переход к следующему решению производится в случайным образом выбранном
- 9. Градиентные методы Основаны на использовании градиента ЦФ (градиент в точке указывает направление скорейшего возрастания функции). Пошаговый
- 10. Непрямые методы Сведение задачи НП к более простой задаче, например задаче ЛП. В зависимости от вида
- 11. Методы квадратичного программирования Целевая функция представляет собой сумму линейной функции и квадратичной формы, а функции ограничений
- 12. Методы сепарабельного программирования Функции ограничений сепарабельны: F(x1….xn)=F1(x1)+…+Fn(xn) Методы решения основаны на линейной аппроксимации ЦФ и применении
- 13. Методы геометрического программирования. Целевая функция и функции ограничений являются полиномами и имеют следующий вид: F=∑uk ck-
- 14. Методы стохастического программирования. Целевая функция и функции ограничений являются линейными, но при этом коэффициенты aij, bi
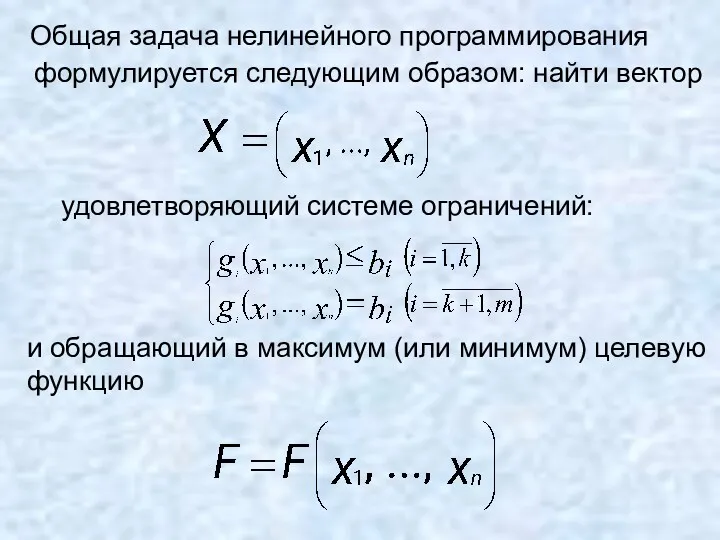
- 15. Общая задача нелинейного программирования формулируется следующим образом: найти вектор удовлетворяющий системе ограничений: и обращающий в максимум
- 16. Вектор удовлетворяющий системе ограничений называется допустимым решением задачи нелинейного программирования Допустимое решение, при котором целевая функция
- 17. Факторы, затрудняющие решение задач нелинейного программирования. В задачах ЛП ЦФ имеет абсолютный глобальный экстремум, в НП
- 18. Для задачи ЛП множество допустимых решений задачи образует выпуклый многогранник, при этом оптимальное решение достигается в
- 19. В ЛП множество точек, в которых ЦФ принимает постоянное значение есть гиперплоскость c1x1+……cnxn=const. При различных значениях
- 20. Геометрический метод решения задач НП Если определена область допустимых решений, то нахождение решения задачи нелинейного программирования
- 21. Решение задачи нелинейного программирования графическим способом : Находят область допустимых решений задачи. Если она пуста, то
- 22. Определяют гиперповерхность наивысшего (наинизшего) уровня или устанавливают неразрешимость задачи из-за неограниченности функции F сверху (снизу) на
- 23. Пример. Найти максимальное и минимальное значение функции При выполнении условий
- 24. Решение. Областью допустимых решений этой задачи является треугольник ABC
- 25. Полагая значение целевой функции F равным некоторому числу h, получаем линии уровня которые являются окружностями с
- 26. Проводя из точки P, окружности различных радиусов, получим, что минимальное значение функция F принимает в точке
- 27. Координаты точки D определяются из равенства угловых коэффициентов прямой Из уравнения прямой видим, что ее угловой
- 28. Рассматривая X2 как неявную функцию от переменной X1 и дифференцируя уравнение окружности, получим откуда
- 29. получим систему: Решая систему, получим
- 30. Целевая функция F принимает максимальное значение в точке C..
- 32. Скачать презентацию
![Рассмотрим функцию f(X) на отрезке [a,b]. . а в f(x5)-глобальный](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/282772/slide-1.jpg)
Рассмотрим функцию f(X) на отрезке [a,b]. .
а
в
f(x5)-глобальный максимум, f(x1), f(x3) –
Рассмотрим функцию f(X) на отрезке [a,b]. .
а
в
f(x5)-глобальный максимум, f(x1), f(x3) –
Необходимое условие существования экстремума функции f(x) в точке x0 является равенство
Необходимое условие существования экстремума функции f(x) в точке x0 является равенство
Методы решения задач НП
Методы решения задач НП
Аналитические методы
Основаны на использовании необходимых и достаточных условий экстремумов функций.
Аналитические методы
Основаны на использовании необходимых и достаточных условий экстремумов функций.
Численные методы
Для поиска экстремума функции, зависящей от 1-й переменной.
Выделяется
Численные методы
Для поиска экстремума функции, зависящей от 1-й переменной.
Выделяется
Покоординатные методы
Отыскание экстремального значения функции по каждой из переменных.
Покоординатные методы
Отыскание экстремального значения функции по каждой из переменных.
Методы случайного поиска
Выбирается любое допустимое решение.
Переход к следующему решению
Методы случайного поиска
Выбирается любое допустимое решение.
Переход к следующему решению
Градиентные методы
Основаны на использовании градиента ЦФ (градиент в точке указывает
Градиентные методы
Основаны на использовании градиента ЦФ (градиент в точке указывает
Непрямые методы
Сведение задачи НП к более простой задаче, например задаче ЛП.
Непрямые методы
Сведение задачи НП к более простой задаче, например задаче ЛП.
Методы квадратичного программирования
Целевая функция представляет собой сумму линейной функции и квадратичной
Методы квадратичного программирования
Целевая функция представляет собой сумму линейной функции и квадратичной
Методы сепарабельного программирования
Функции ограничений сепарабельны:
F(x1….xn)=F1(x1)+…+Fn(xn)
Методы решения основаны на линейной аппроксимации
Методы сепарабельного программирования
Функции ограничений сепарабельны:
F(x1….xn)=F1(x1)+…+Fn(xn)
Методы решения основаны на линейной аппроксимации
Методы геометрического программирования.
Целевая функция и функции ограничений являются полиномами и
Методы геометрического программирования.
Целевая функция и функции ограничений являются полиномами и
Методы стохастического программирования.
Целевая функция и функции ограничений являются линейными, но
Методы стохастического программирования.
Целевая функция и функции ограничений являются линейными, но
Общая задача нелинейного программирования формулируется следующим образом: найти вектор
удовлетворяющий
Общая задача нелинейного программирования формулируется следующим образом: найти вектор
удовлетворяющий
Вектор
удовлетворяющий системе ограничений называется допустимым решением задачи нелинейного программирования
Допустимое
Вектор
удовлетворяющий системе ограничений называется допустимым решением задачи нелинейного программирования
Допустимое
Факторы, затрудняющие решение задач нелинейного программирования.
В задачах ЛП ЦФ имеет абсолютный
Факторы, затрудняющие решение задач нелинейного программирования.
В задачах ЛП ЦФ имеет абсолютный
Для задачи ЛП множество допустимых решений задачи образует выпуклый многогранник, при
Для задачи ЛП множество допустимых решений задачи образует выпуклый многогранник, при
В ЛП множество точек, в которых ЦФ принимает постоянное значение есть
В ЛП множество точек, в которых ЦФ принимает постоянное значение есть
Геометрический метод решения задач НП
Если определена область допустимых решений, то
Геометрический метод решения задач НП
Если определена область допустимых решений, то
Решение задачи нелинейного программирования графическим способом :
Находят область допустимых решений задачи.
Решение задачи нелинейного программирования графическим способом :
Находят область допустимых решений задачи.
Определяют гиперповерхность наивысшего (наинизшего) уровня или устанавливают неразрешимость задачи из-за неограниченности
Определяют гиперповерхность наивысшего (наинизшего) уровня или устанавливают неразрешимость задачи из-за неограниченности
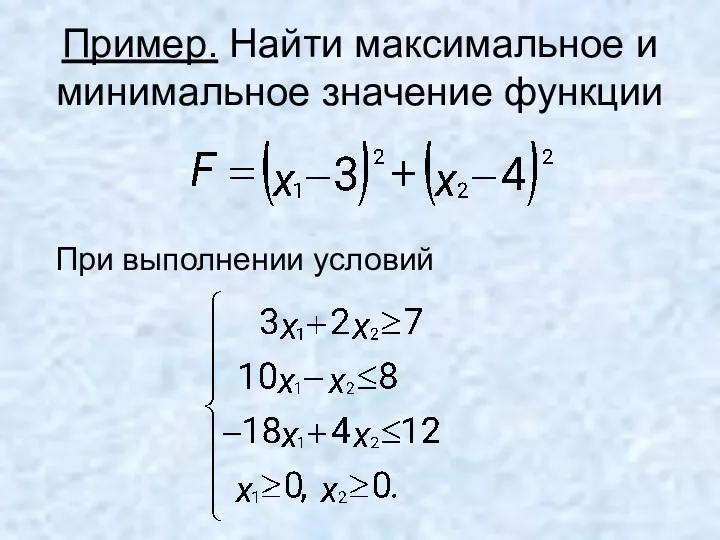
Пример. Найти максимальное и минимальное значение функции
При выполнении условий
Пример. Найти максимальное и минимальное значение функции
При выполнении условий
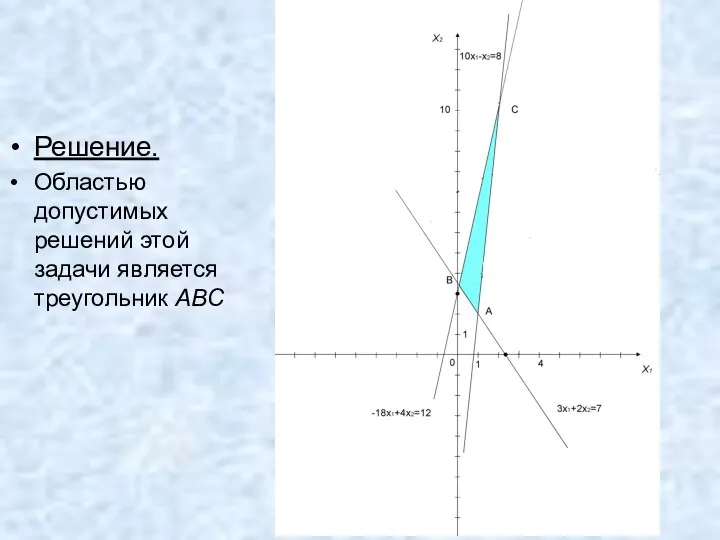
Решение.
Областью допустимых решений этой задачи является треугольник ABC
Решение.
Областью допустимых решений этой задачи является треугольник ABC
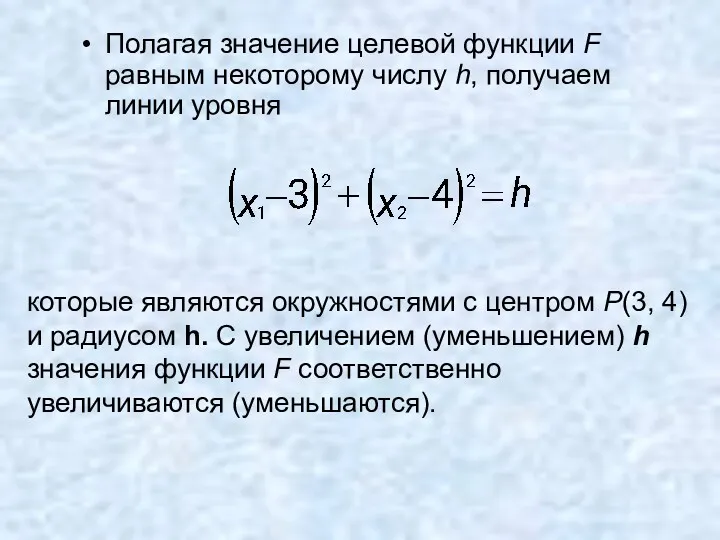
Полагая значение целевой функции F равным некоторому числу h, получаем
Полагая значение целевой функции F равным некоторому числу h, получаем
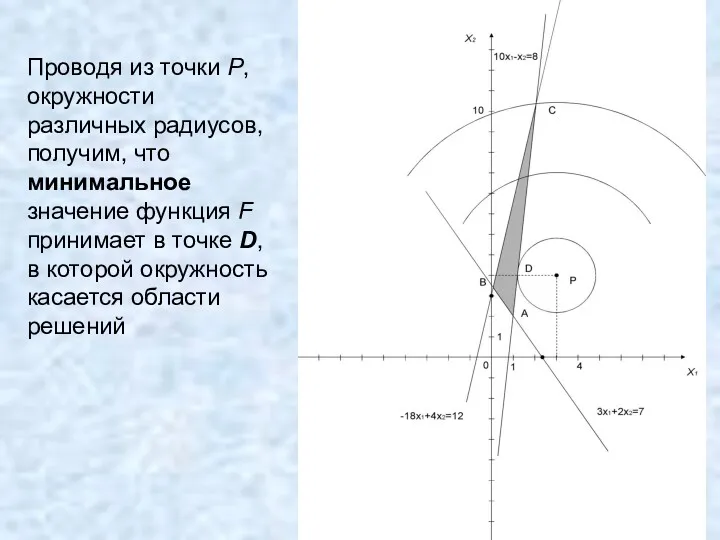
Проводя из точки P, окружности различных радиусов, получим, что минимальное значение
Проводя из точки P, окружности различных радиусов, получим, что минимальное значение
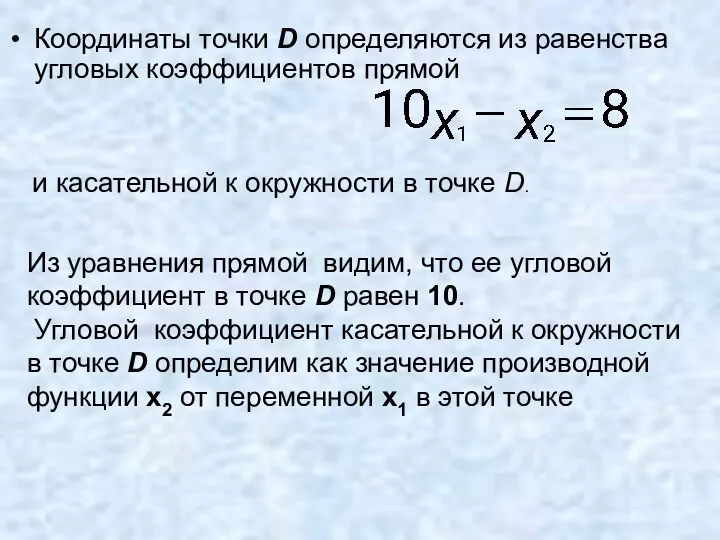
Координаты точки D определяются из равенства угловых коэффициентов прямой
Из уравнения
Координаты точки D определяются из равенства угловых коэффициентов прямой
Из уравнения
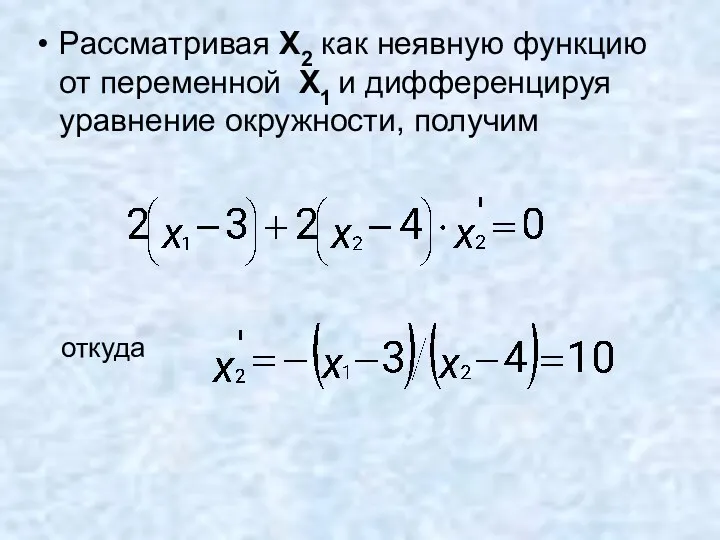
Рассматривая X2 как неявную функцию от переменной X1 и дифференцируя уравнение
Рассматривая X2 как неявную функцию от переменной X1 и дифференцируя уравнение
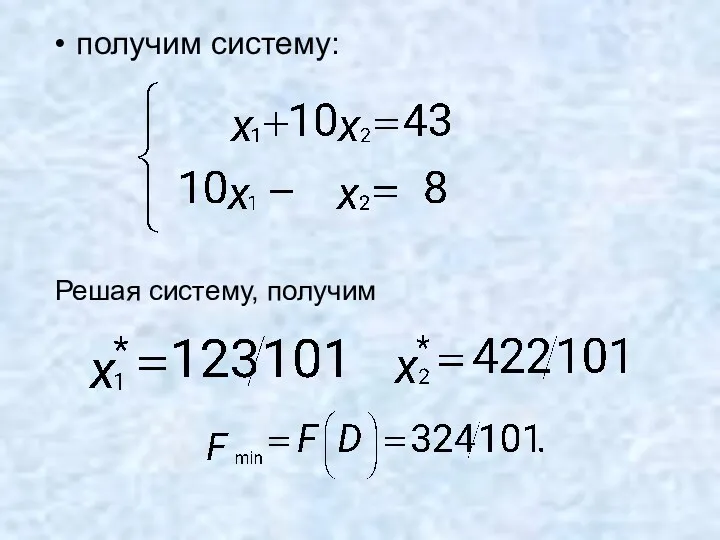
получим систему:
Решая систему, получим
получим систему:
Решая систему, получим
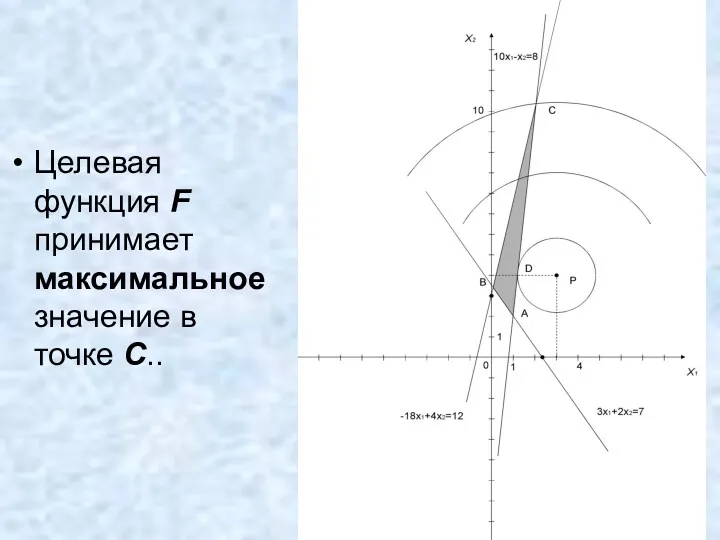
Целевая функция F принимает максимальное значение в точке C..
Целевая функция F принимает максимальное значение в точке C..
 Комп’ютерна презентація. Етапи роботи з презентацією. Середовище редактора презентацій
Комп’ютерна презентація. Етапи роботи з презентацією. Середовище редактора презентацій Использование Битрикс+React
Использование Битрикс+React Тиждень циклової комісії Комп'ютерної інженерії
Тиждень циклової комісії Комп'ютерної інженерії Сравнительный анализ дизайна интернет-сайтов
Сравнительный анализ дизайна интернет-сайтов Нейронные сети глубокого обучения
Нейронные сети глубокого обучения Раскраскин. Журнал для детей и родителей
Раскраскин. Журнал для детей и родителей Операционные системы. Основные понятия, назначения и функции ОС
Операционные системы. Основные понятия, назначения и функции ОС Язык SQL. Манипулирование структурой данных
Язык SQL. Манипулирование структурой данных Флэш-память
Флэш-память Как понять когда можно бросать работу и уходить в стартап
Как понять когда можно бросать работу и уходить в стартап Урок по темеЛинейные вычислительные алгоритмы.
Урок по темеЛинейные вычислительные алгоритмы. Системы автоматизированного проектирования Autocad
Системы автоматизированного проектирования Autocad Основи програмування – мови програмування
Основи програмування – мови програмування САПР для проектирования электрики, автоматики и систем автоматизации
САПР для проектирования электрики, автоматики и систем автоматизации Agile, Scrum подходы в управлении проектами
Agile, Scrum подходы в управлении проектами Неделя Информатики и Лего-конструирования
Неделя Информатики и Лего-конструирования Логические основы
Логические основы Программный комплекс для гидравлических расчетов
Программный комплекс для гидравлических расчетов Классификация библиографических пособий
Классификация библиографических пособий Autodesk Revit. Эффективный инструмент работы для небольших проектных групп
Autodesk Revit. Эффективный инструмент работы для небольших проектных групп Оператор ветвления или условный оператор. 9 класс
Оператор ветвления или условный оператор. 9 класс Как снимать интересные сториз
Как снимать интересные сториз Файлы в С++
Файлы в С++ Команды ввод-вывод в Турбо Паскале
Команды ввод-вывод в Турбо Паскале Ионное легирование полупроводников
Ионное легирование полупроводников Алогритм Дейкстры
Алогритм Дейкстры Работа с графикой в С++ Bulder
Работа с графикой в С++ Bulder Автоматизация бизнес-процессов
Автоматизация бизнес-процессов