Занятие №5. Анализ сглаживания параметров линейной траектории по фиксированной выборке измеренных координат презентация
- Занятие №5. Анализ сглаживания параметров линейной траектории по фиксированной выборке измеренных координат

Содержание
- 2. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Учебные вопросы: Физический смысл операции весового суммирования измеренных координат. Показатель качества сглаживания и
- 3. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Литература В.Н. Ратушняк, С.В. Бейльман, И.В. Тяпкин. Основы обработки и передачи информации в
- 4. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Вопрос №1 Физический смысл операции весового суммирования измеренных координат.
- 5. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Вначале обратим внимание на характер весовых коэффициентов сглаживания. Анализ сглаживания проводился для параметров
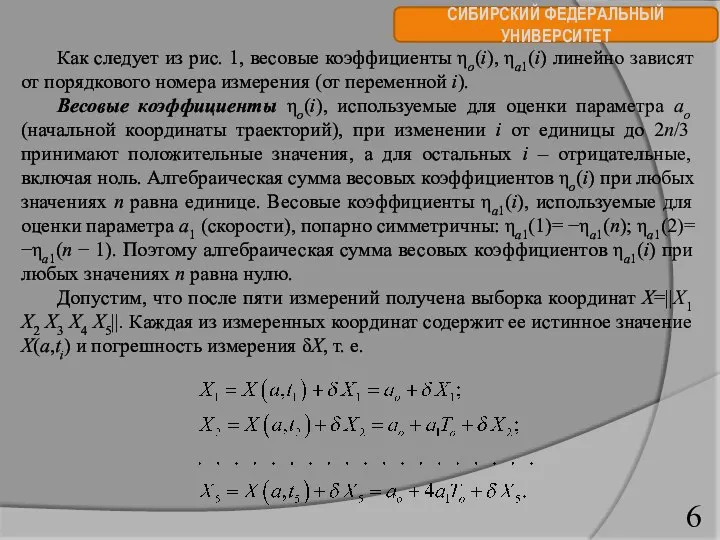
- 6. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Как следует из рис. 1, весовые коэффициенты ηo(i), ηa1(i) линейно зависят от порядкового
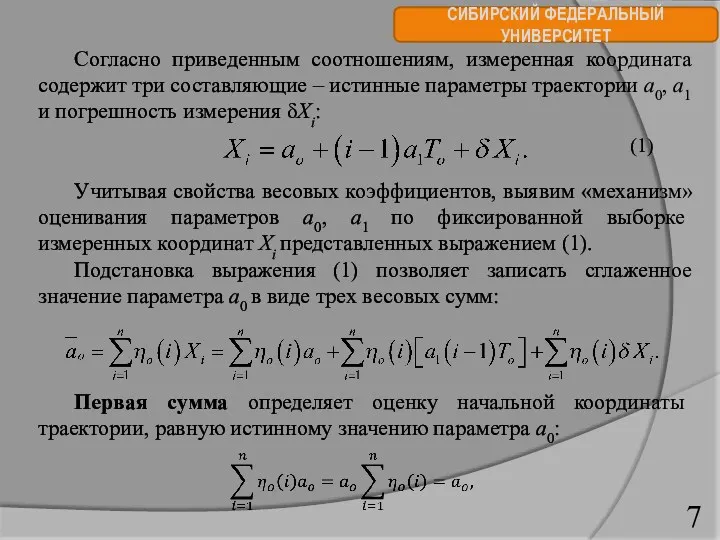
- 7. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Согласно приведенным соотношениям, измеренная координата содержит три составляющие ‒ истинные параметры траектории а0,
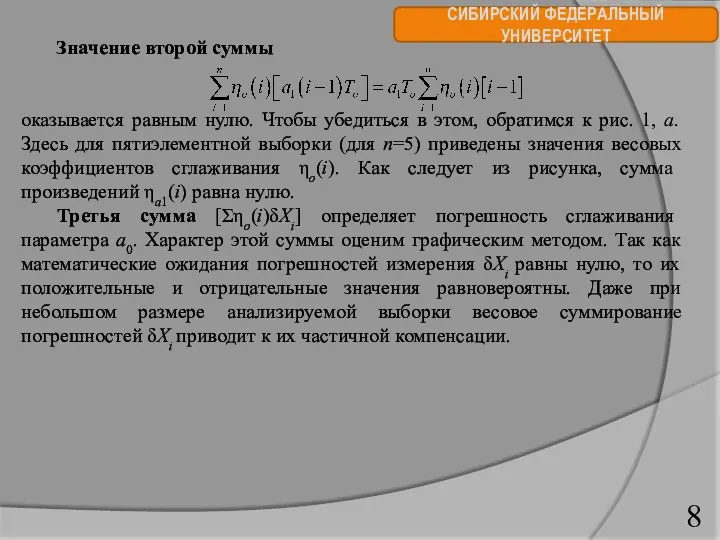
- 8. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Значение второй суммы оказывается равным нулю. Чтобы убедиться в этом, обратимся к рис.
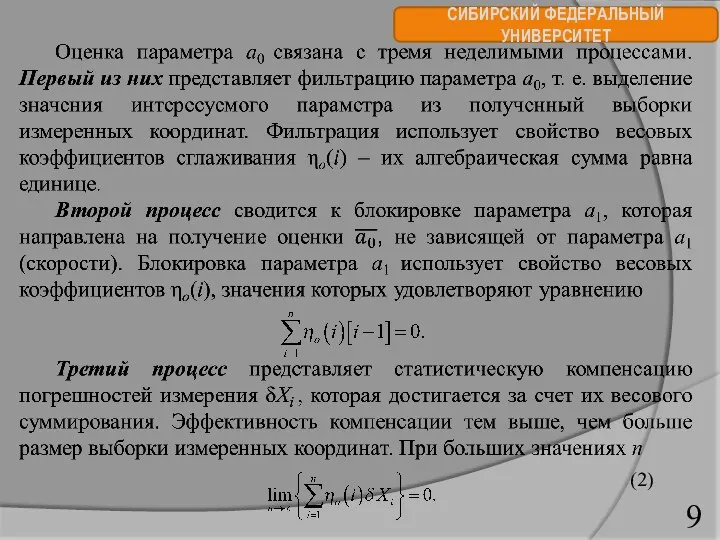
- 9. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ (2)
- 10. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
- 11. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Вопрос №2 Показатель качества сглаживания и экстраполяции.
- 12. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
- 13. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
- 14. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
- 15. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Вопрос №3 Расчет значений сглаживающей функции алгоритма оптимальной оценки параметров линейной траектории.
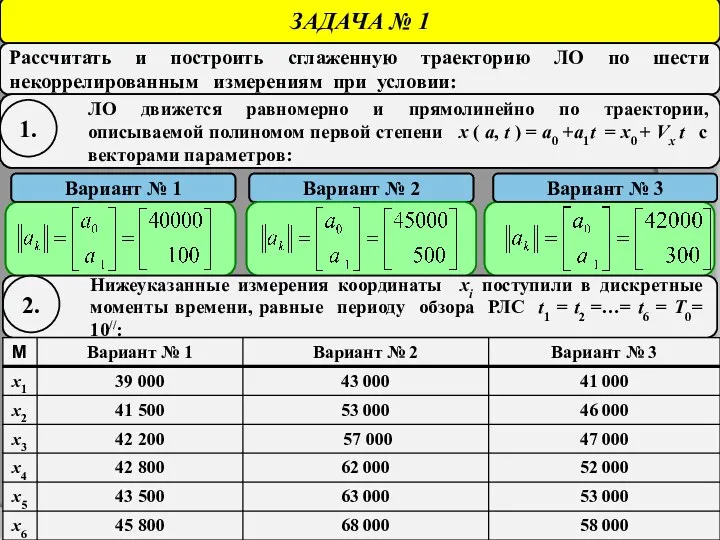
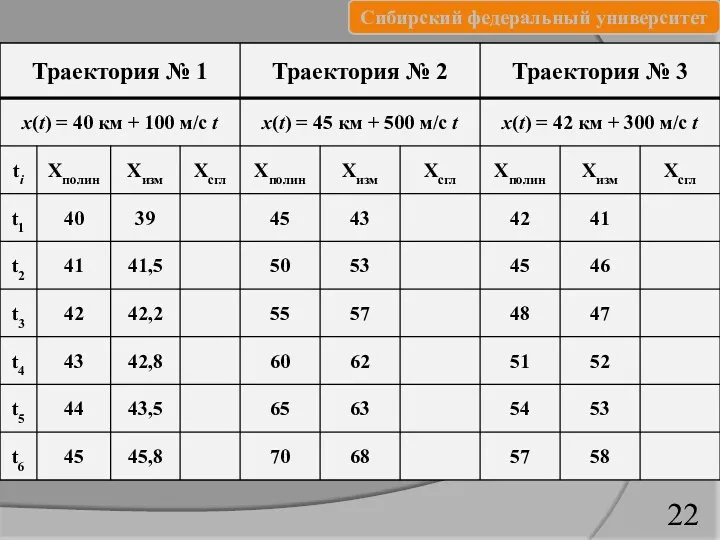
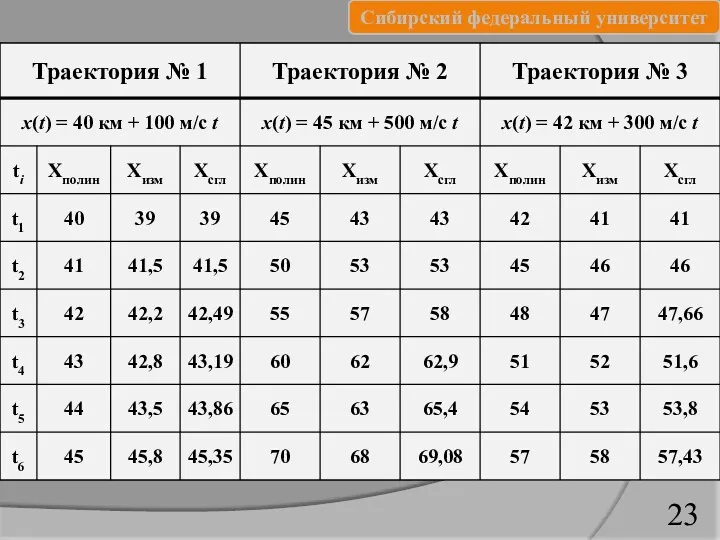
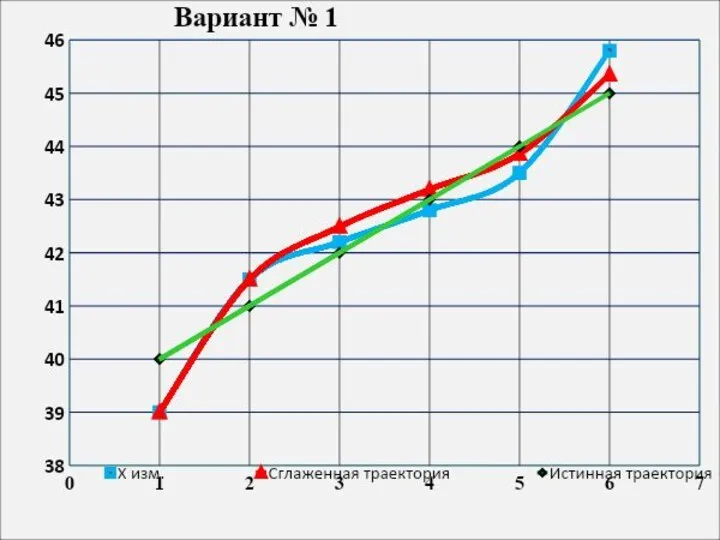
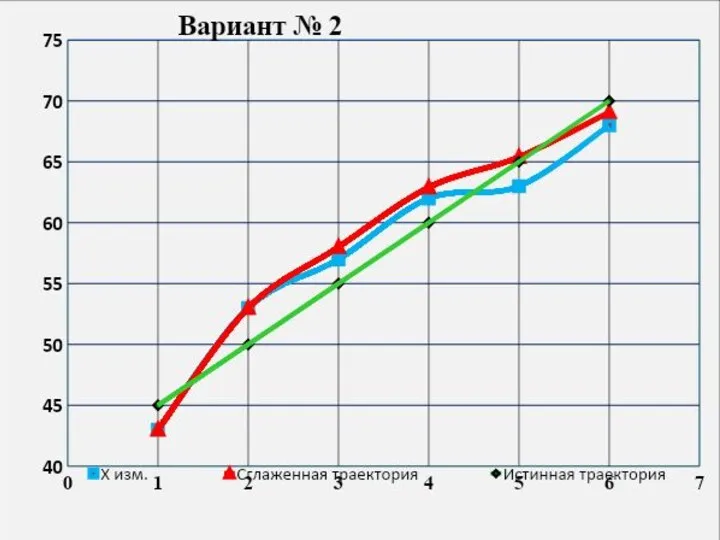
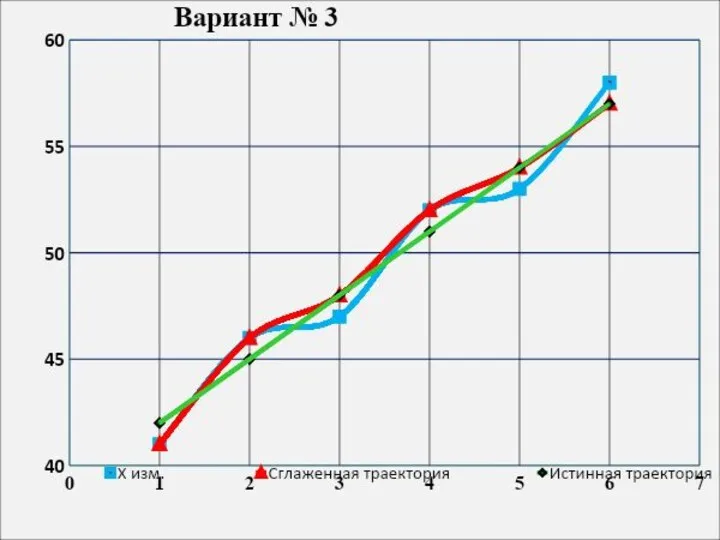
- 16. ЗАДАЧА № 1 Рассчитать и построить сглаженную траекторию ЛО по шести некоррелированным измерениям при условии: ЛО
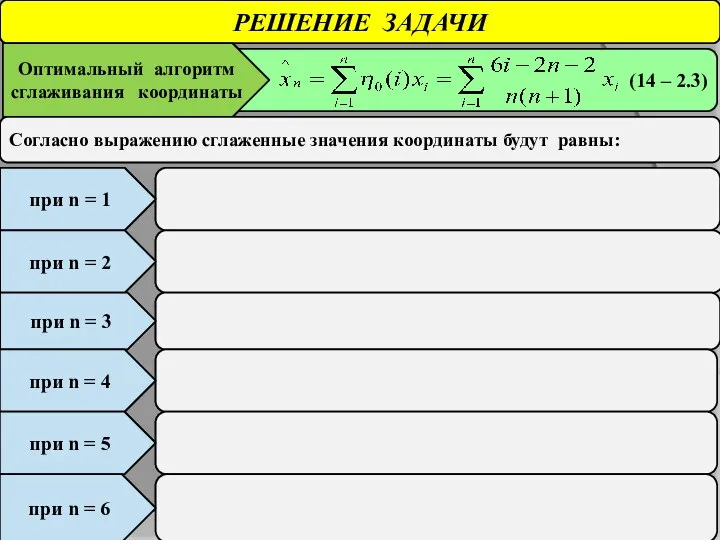
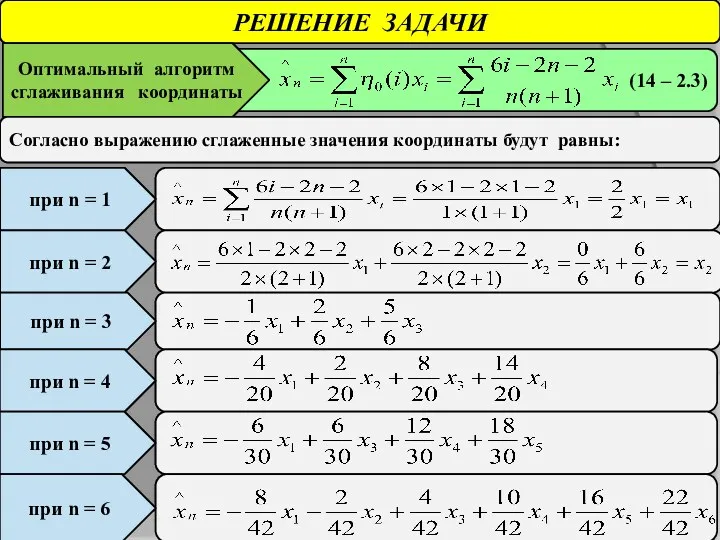
- 17. РЕШЕНИЕ ЗАДАЧИ (14 – 2.3) Оптимальный алгоритм сглаживания координаты Согласно выражению сглаженные значения координаты будут равны:
- 18. РЕШЕНИЕ ЗАДАЧИ (14 – 2.3) Оптимальный алгоритм сглаживания координаты Согласно выражению сглаженные значения координаты будут равны:
- 19. 22
- 20. 23
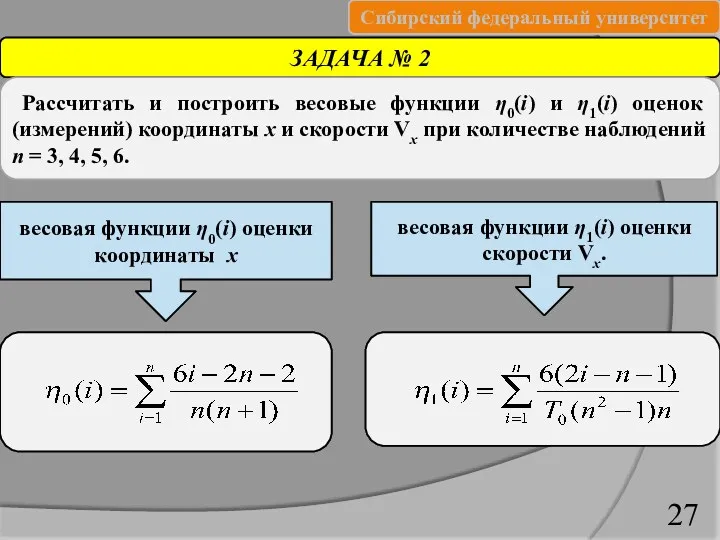
- 24. ЗАДАЧА № 2 Рассчитать и построить весовые функции η0(i) и η1(i) оценок (измерений) координаты х и
- 25. РЕШЕНИЕ ЗАДАЧИ В соответствии с выражением значения весовых коэффициентов функции η0(i) оценки координаты х будут равны:
- 26. Значения весовых коэффициентов функции η0(i) оценки координаты х будут равны при n = 4 : η0
- 27. Значения весовых коэффициентов функции η0(i) оценки координаты х при n = 5 будут равны: η0 (1)
- 28. Значения весовых коэффициентов функции η0(i) оценки координаты х будут равны: η0 (1) = - 8/42; η0
- 29. значения весовых коэффициентов функции η1(i) оценки приращения координаты х (скорости) будут равны: η1 (1) = -
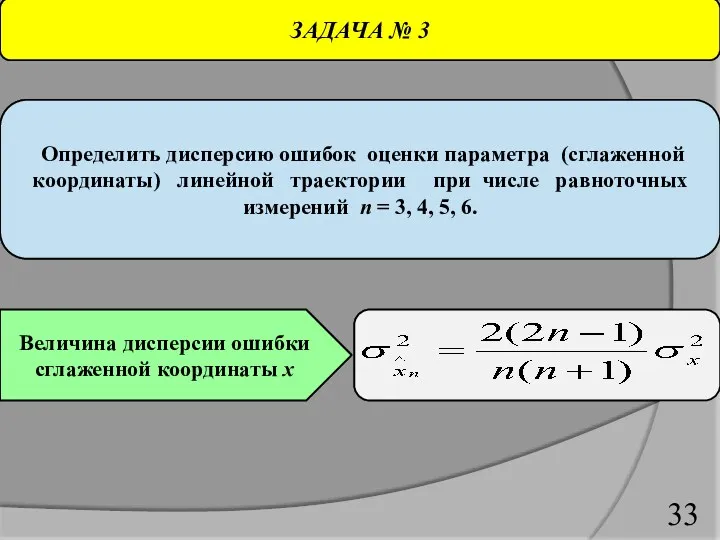
- 30. ЗАДАЧА № 3 Определить дисперсию ошибок оценки параметра (сглаженной координаты) линейной траектории при числе равноточных измерений
- 31. Величина дисперсии ошибки сглаженной координаты х при n = 3 при n = 4 при n
- 32. Анализ графика значений дисперсии ошибок оценки сглаженной координаты показывает, что для достижения приемлемой точности оценки параметров
- 33. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Вопрос №4 Синтез структурной схемы решающего устройства для оптимальной оценки параметров ЛО.
- 34. 37 ЗАДАНИЕ № 1 Синтезировать структурную схему решающего устройства, реализующего оптимальный алгоритм оценки параметров линейной траектории
- 35. ДЗУ ОЗУ ∑ Сумматор t2 = T0 t3 = T0 хn-2 хn-1 хn ηn ηn-1 ηn-2
- 36. 39 Взвешенные значения координат одновременно поступают на вход суммирующего устройства. С выхода суммирующего устройства сглаженное значение
- 37. 40 Общие выводы: Оценивание параметров траектории (а0, а1) предполагает использование всей совокупности измеренных координат х =
- 38. 41 Сглаживание по фиксированной выборке измеренных координат предусматривает n операций весового суммирования , что согласуется с
- 39. Вопросы для самоконтроля 1. Сформулируйте постановку задачи оценки параметров траектории. 2. Поясните вероятностный смысл функции правдоподобия.
- 41. Скачать презентацию
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Учебные вопросы:
Физический смысл операции весового суммирования измеренных координат.
Показатель качества
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Учебные вопросы:
Физический смысл операции весового суммирования измеренных координат.
Показатель качества
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Литература
В.Н. Ратушняк, С.В. Бейльман, И.В. Тяпкин. Основы обработки и
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Литература
В.Н. Ратушняк, С.В. Бейльман, И.В. Тяпкин. Основы обработки и
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Вопрос №1
Физический смысл операции весового суммирования измеренных координат.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Вопрос №1
Физический смысл операции весового суммирования измеренных координат.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
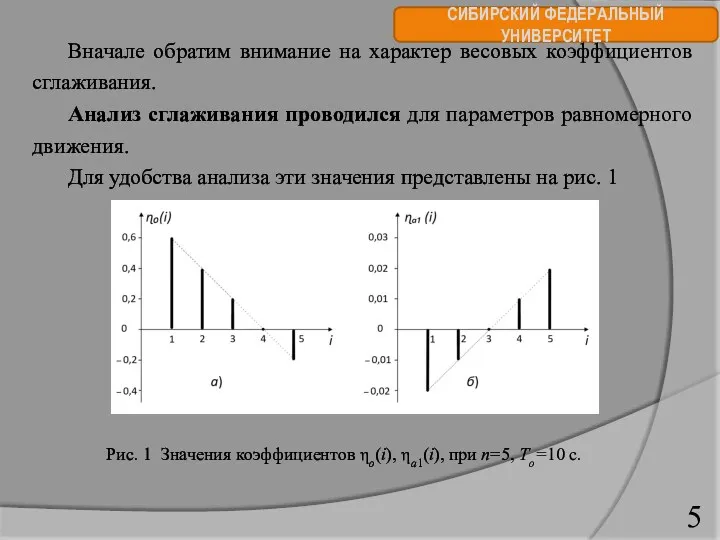
Вначале обратим внимание на характер весовых коэффициентов сглаживания.
Анализ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Вначале обратим внимание на характер весовых коэффициентов сглаживания.
Анализ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Как следует из рис. 1, весовые коэффициенты ηo(i), ηa1(i)
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Как следует из рис. 1, весовые коэффициенты ηo(i), ηa1(i)
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Согласно приведенным соотношениям, измеренная координата содержит три составляющие ‒
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Согласно приведенным соотношениям, измеренная координата содержит три составляющие ‒
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Значение второй суммы
оказывается равным нулю. Чтобы убедиться в этом,
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Значение второй суммы
оказывается равным нулю. Чтобы убедиться в этом,
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
(2)
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
(2)
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Вопрос №2
Показатель качества сглаживания и экстраполяции.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Вопрос №2
Показатель качества сглаживания и экстраполяции.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Вопрос №3
Расчет значений сглаживающей функции алгоритма оптимальной оценки
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Вопрос №3
Расчет значений сглаживающей функции алгоритма оптимальной оценки
ЗАДАЧА № 1
Рассчитать и построить сглаженную траекторию ЛО по шести некоррелированным
ЗАДАЧА № 1
Рассчитать и построить сглаженную траекторию ЛО по шести некоррелированным
РЕШЕНИЕ ЗАДАЧИ
(14 – 2.3)
Оптимальный алгоритм сглаживания координаты
Согласно выражению сглаженные значения координаты
РЕШЕНИЕ ЗАДАЧИ
(14 – 2.3)
Оптимальный алгоритм сглаживания координаты
Согласно выражению сглаженные значения координаты
РЕШЕНИЕ ЗАДАЧИ
(14 – 2.3)
Оптимальный алгоритм сглаживания координаты
Согласно выражению сглаженные значения координаты
РЕШЕНИЕ ЗАДАЧИ
(14 – 2.3)
Оптимальный алгоритм сглаживания координаты
Согласно выражению сглаженные значения координаты
22
22
23
23
ЗАДАЧА № 2
Рассчитать и построить весовые функции η0(i) и η1(i)
ЗАДАЧА № 2
Рассчитать и построить весовые функции η0(i) и η1(i)
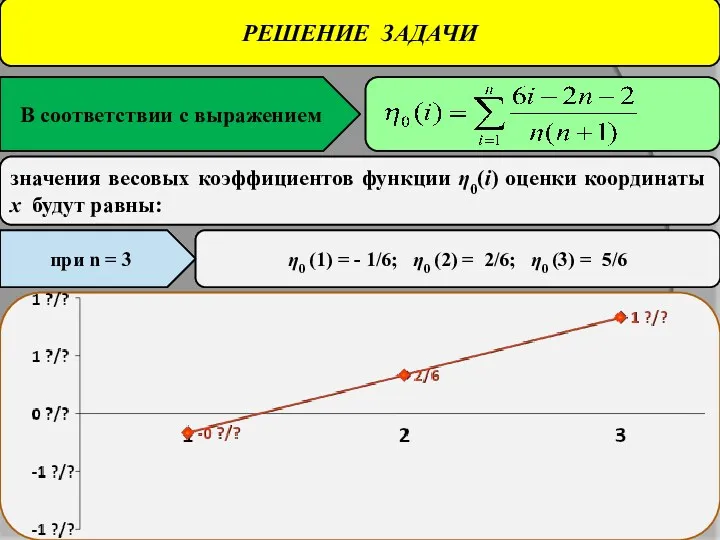
РЕШЕНИЕ ЗАДАЧИ
В соответствии с выражением
значения весовых коэффициентов функции η0(i) оценки координаты
РЕШЕНИЕ ЗАДАЧИ
В соответствии с выражением
значения весовых коэффициентов функции η0(i) оценки координаты
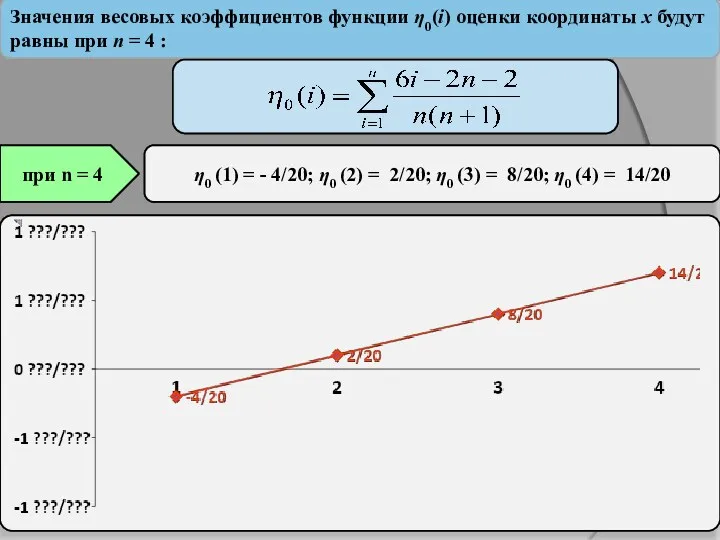
Значения весовых коэффициентов функции η0(i) оценки координаты х будут равны при
Значения весовых коэффициентов функции η0(i) оценки координаты х будут равны при
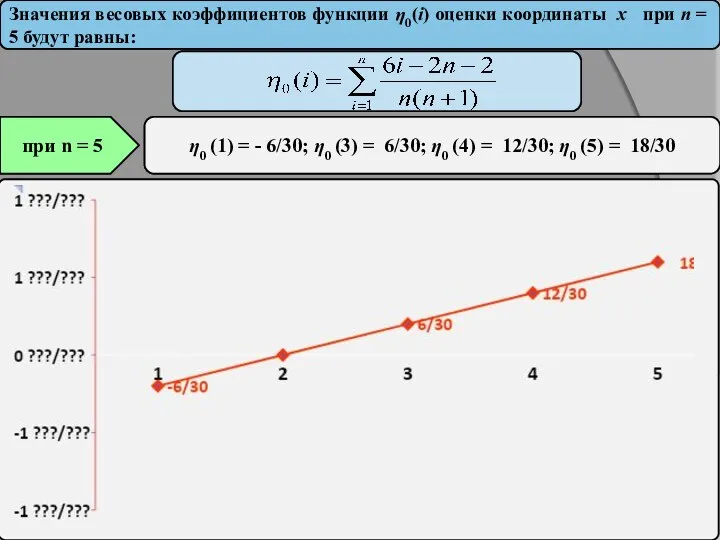
Значения весовых коэффициентов функции η0(i) оценки координаты х при n =
Значения весовых коэффициентов функции η0(i) оценки координаты х при n =
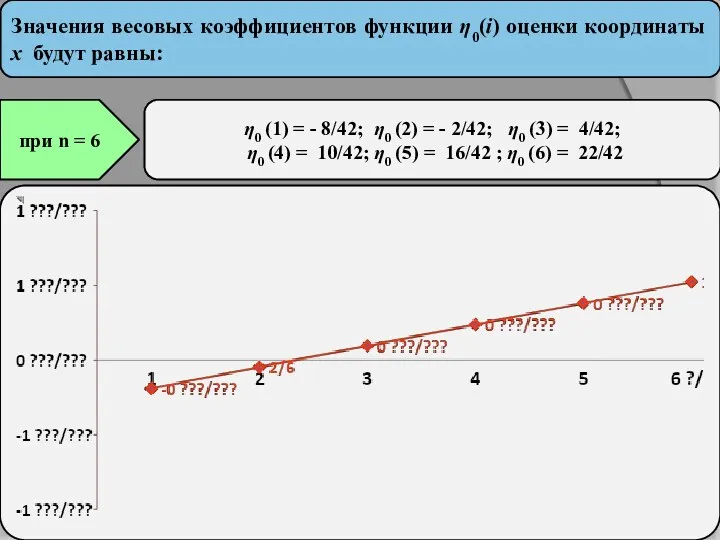
Значения весовых коэффициентов функции η0(i) оценки координаты х будут равны:
η0 (1)
Значения весовых коэффициентов функции η0(i) оценки координаты х будут равны:
η0 (1)
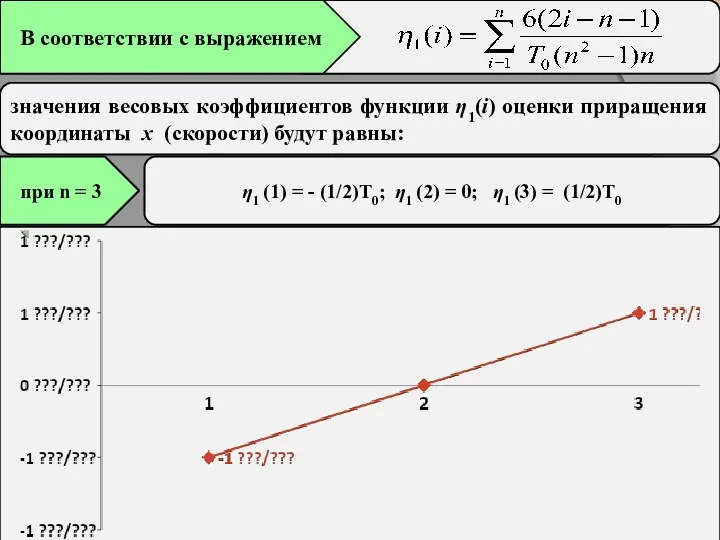
значения весовых коэффициентов функции η1(i) оценки приращения координаты х (скорости) будут
значения весовых коэффициентов функции η1(i) оценки приращения координаты х (скорости) будут
ЗАДАЧА № 3
Определить дисперсию ошибок оценки параметра (сглаженной координаты) линейной
ЗАДАЧА № 3
Определить дисперсию ошибок оценки параметра (сглаженной координаты) линейной
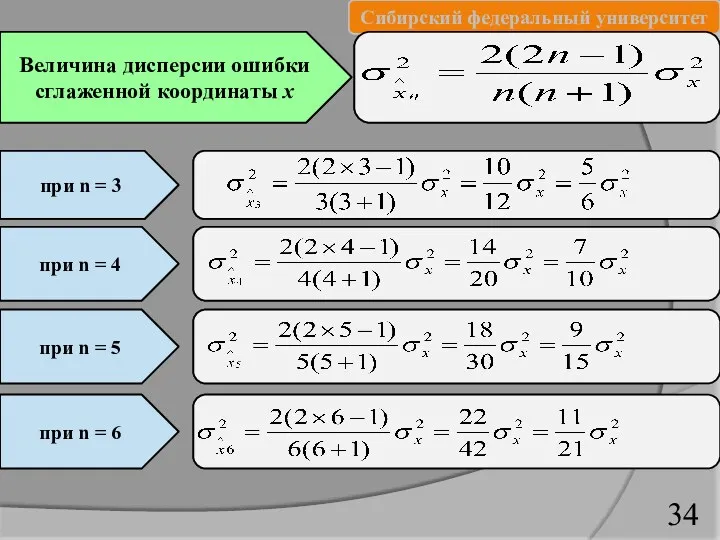
Величина дисперсии ошибки сглаженной координаты х
при n = 3
при
Величина дисперсии ошибки сглаженной координаты х
при n = 3
при
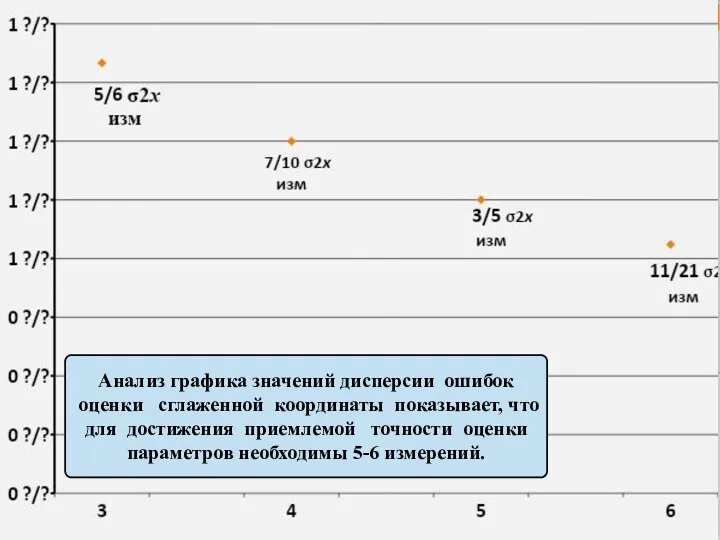
Анализ графика значений дисперсии ошибок оценки сглаженной координаты показывает, что для
Анализ графика значений дисперсии ошибок оценки сглаженной координаты показывает, что для
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Вопрос №4
Синтез структурной схемы решающего устройства для оптимальной
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Вопрос №4
Синтез структурной схемы решающего устройства для оптимальной
37
ЗАДАНИЕ № 1
Синтезировать структурную схему решающего устройства, реализующего оптимальный алгоритм оценки
37
ЗАДАНИЕ № 1
Синтезировать структурную схему решающего устройства, реализующего оптимальный алгоритм оценки
ДЗУ
ОЗУ
∑
Сумматор
t2 = T0
t3 = T0
хn-2
хn-1
хn
ηn
ηn-1
ηn-2
Реализация весовой функции
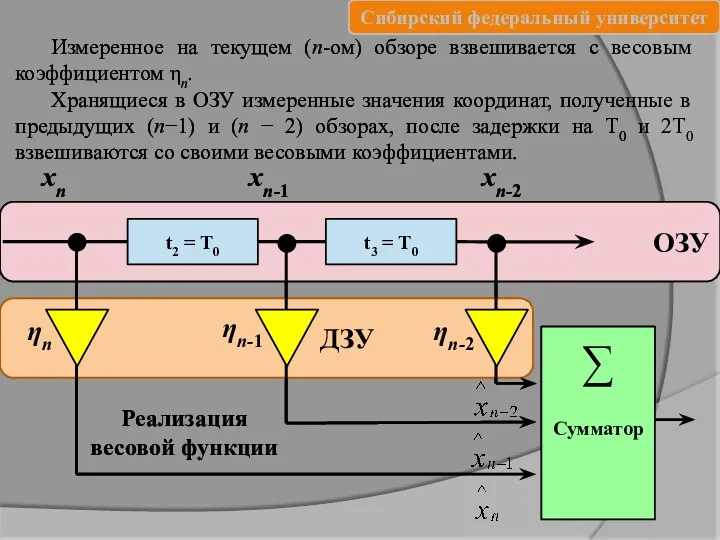
Измеренное на текущем (n-ом)
ДЗУ
ОЗУ
∑
Сумматор
t2 = T0
t3 = T0
хn-2
хn-1
хn
ηn
ηn-1
ηn-2
Реализация весовой функции
Измеренное на текущем (n-ом)
39
Взвешенные значения координат одновременно поступают на вход суммирующего устройства.
С выхода суммирующего
39
Взвешенные значения координат одновременно поступают на вход суммирующего устройства.
С выхода суммирующего
40
Общие выводы:
Оценивание параметров траектории (а0, а1) предполагает использование всей совокупности измеренных
40
Общие выводы:
Оценивание параметров траектории (а0, а1) предполагает использование всей совокупности измеренных
41
Сглаживание по фиксированной выборке измеренных координат предусматривает n операций весового суммирования
41
Сглаживание по фиксированной выборке измеренных координат предусматривает n операций весового суммирования
Вопросы для самоконтроля
1. Сформулируйте постановку задачи оценки параметров траектории.
2. Поясните вероятностный
Вопросы для самоконтроля
1. Сформулируйте постановку задачи оценки параметров траектории.
2. Поясните вероятностный
 Программное обеспечение ПК
Программное обеспечение ПК Модификация базы данных студенты
Модификация базы данных студенты Open Cascade VPN. Installation and activation manual
Open Cascade VPN. Installation and activation manual CSS basics
CSS basics Электронные таблицы Excel 2007. Средства анализа данных
Электронные таблицы Excel 2007. Средства анализа данных Школа блогеров (инструкция)
Школа блогеров (инструкция) Игра. Условное представление.часть1
Игра. Условное представление.часть1 Значение коммуникации в управлении организацией
Значение коммуникации в управлении организацией Устройство компьютера. История развития вычислительной техники
Устройство компьютера. История развития вычислительной техники Безопасность персональных данных в сети Интернет
Безопасность персональных данных в сети Интернет Организация циклов на языке Pascal
Организация циклов на языке Pascal Применение информационных технологий для научных исследований в области земельного, природоресурсного, аграрного права
Применение информационных технологий для научных исследований в области земельного, природоресурсного, аграрного права Автоматизация процессного управления
Автоматизация процессного управления Компания Century Star Media Co
Компания Century Star Media Co Оформление цитат, списка литературы, библиографических ссылок
Оформление цитат, списка литературы, библиографических ссылок Графічні об’єкти в текстовому документі
Графічні об’єкти в текстовому документі Лабораторные работы
Лабораторные работы Как устроена книга
Как устроена книга Конфигурация Весовая ред. 3.0 на платформе 1С: Предприятие 8.3
Конфигурация Весовая ред. 3.0 на платформе 1С: Предприятие 8.3 Право и этика СМИ
Право и этика СМИ Использование интернет-банкинга
Использование интернет-банкинга Текстовые документы и технологии их создания. Обработка текстовой информации. Информатика и ИКТ. 8 класс
Текстовые документы и технологии их создания. Обработка текстовой информации. Информатика и ИКТ. 8 класс Обработка рисунков и фотографий Adobe Photoshop. Создание презентации PowerPoint
Обработка рисунков и фотографий Adobe Photoshop. Создание презентации PowerPoint Аутсорсинг логистики электронной торговли
Аутсорсинг логистики электронной торговли IP-адрес
IP-адрес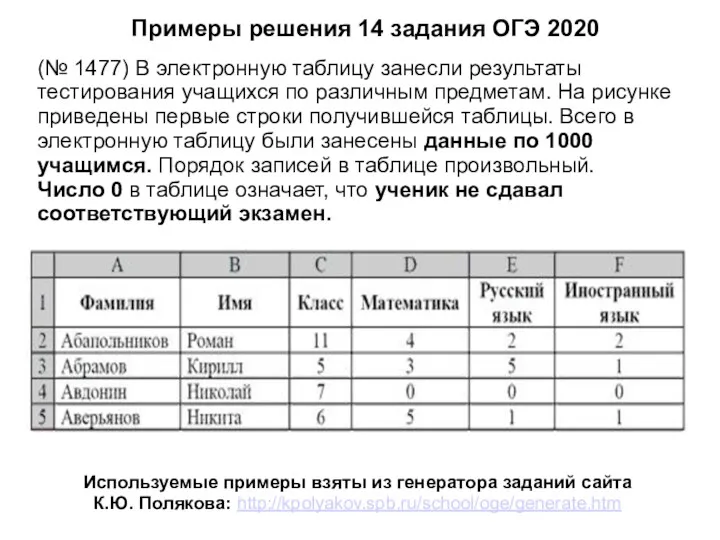 Примеры решения задания 14, ОГЭ по информатике
Примеры решения задания 14, ОГЭ по информатике Алгоритм и его свойства
Алгоритм и его свойства Технические каналы утечки акустической информации
Технические каналы утечки акустической информации