- Глобальные навигационные спутниковые системы. Генеральный дистрибьютор Topcon, Sokkia

Содержание
- 2. ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМы (ГНСС)
- 3. Основные элементы ГНСС Наземная система управления и контроля (сегмент управления), включающая блоки измерения текущего положения спутников
- 4. Принцип работы ГНСС
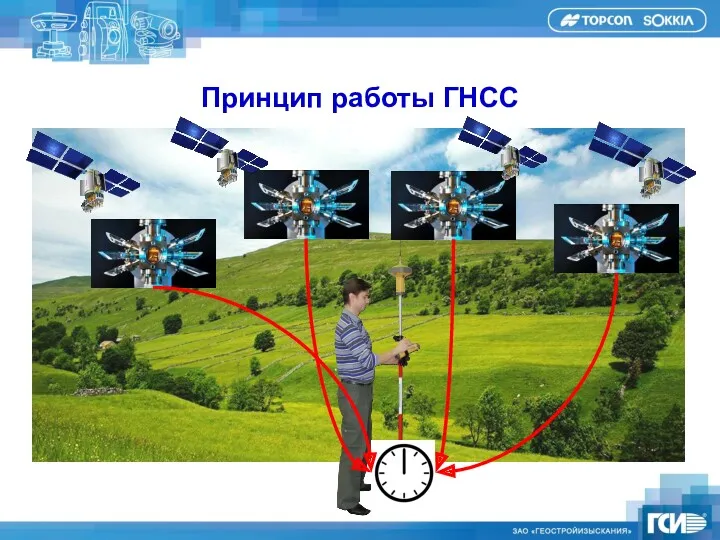
- 5. Принцип работы ГНСС
- 6. Основные области применения ГНСС Геодезия ГИС и картография Управление строительной техникой Другие прикладные задачи…
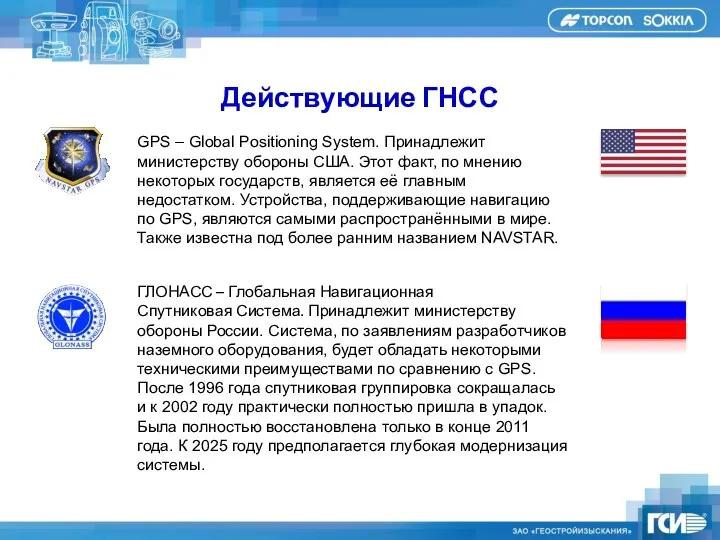
- 7. Действующие ГНСС GPS – Global Positioning System. Принадлежит министерству обороны США. Этот факт, по мнению некоторых
- 8. Создаваемые ГНСС Galileo – Европейская система, находящаяся на этапе создания спутниковой группировки. Планируется полностью развернуть спутниковую
- 9. QZSS – «Квазизенитная спутниковая система», находящаяся на этапе создания спутниковой группировки – проект трёхспутниковой региональной системы
- 10. Структура GPS Число орбитальных плоскостей 6 Средняя высота орбиты 20 182 км Период обращения 11 ч
- 11. Структура ГЛОНАСС Число орбитальных плоскостей 3 Средняя высота орбиты 19 132 км Период обращения 11 ч
- 12. XYZ XYZ XYZ XYZ Абсолютный метод определения координат XYZ
- 13. Метод определения расстояния от спутника до приемника – кодовый Точность определения координат – от 3 до
- 14. XYZ XYZ XYZ XYZ ∆X ∆Y ∆Z Относительный метод определения координат
- 15. Метод определения расстояния от спутника до приемника – фазовый Точность определения составляющих вектора – субсантиметровая Относительный
- 16. Первые фазовые разности Вторые фазовые разности Третьи фазовые разности Относительный метод определения координат
- 17. Система отсчета WGS84 Ось X Ось Y Ось Z Плоскость экватора Гринвичский меридиан ∆X ∆Y ∆Z
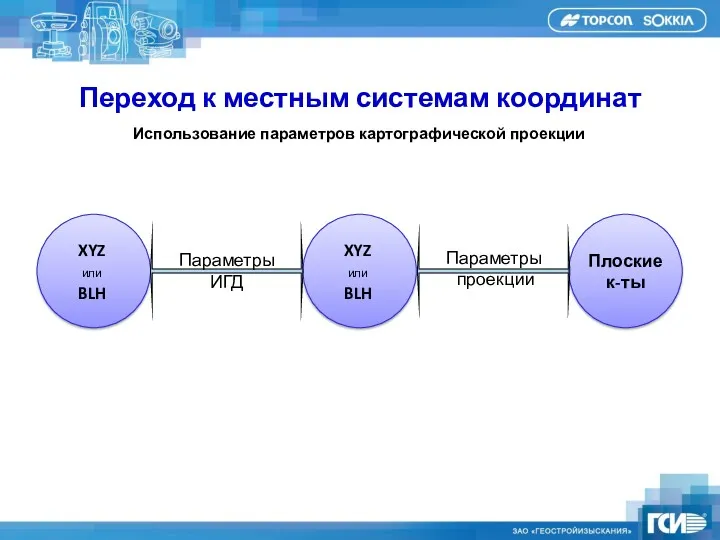
- 18. XYZ или BLH XYZ или BLH Плоские к-ты Параметры ИГД Параметры проекции Переход к местным системам
- 19. 7 параметров: Смещение по осям Разворот относительно каждой из осей Масштабный коэффициент Ось X Ось Z
- 20. 5 параметров: Осевой меридиан Широта начала отсчета Условное смещение на восток Условное смещение на север Масштабный
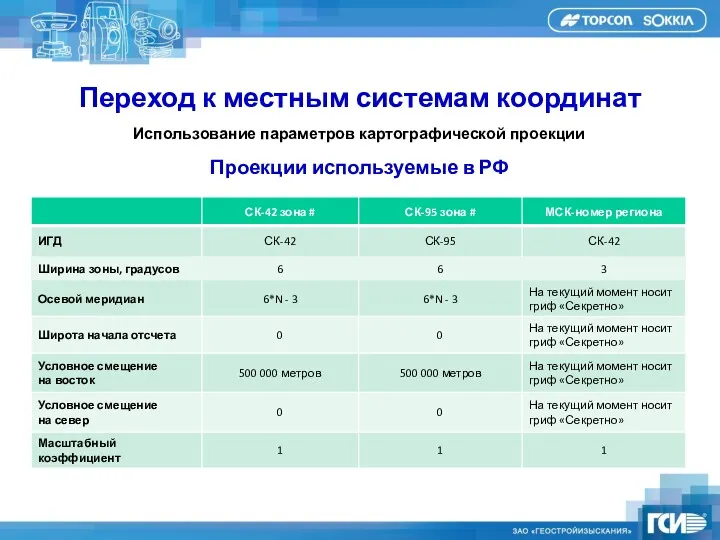
- 21. Переход к местным системам координат Использование параметров картографической проекции Проекции используемые в РФ
- 22. XYZ или BLH XYZ или BLH Условные плоские к-ты Параметры ИГД Параметры условной проекции Условные плоские
- 23. Ось y Условной СК Ось x Условной СК т1 т2 т3 – оценка точности параметров пересчета
- 24. Условные СК WGS84 – используется стереографическая проекция на эллипсоиде WGS84, Что ведет к большим отклонениям на
- 25. Земная поверхность Поверхность эллипсоида Модель геоида Геоид или квазигеоид Эл. высота Ортометрическая высота (Отметка) Переход к
- 26. Поверхность эллипсоида Наклонная плоскость Условия: не менее 4-х точек измеренных друг относительно друга с известными координатами
- 27. Фактор понижения точности (DOP) GDOP – общий PDOP – позиционный HDOP – определения плановых координат VDOP
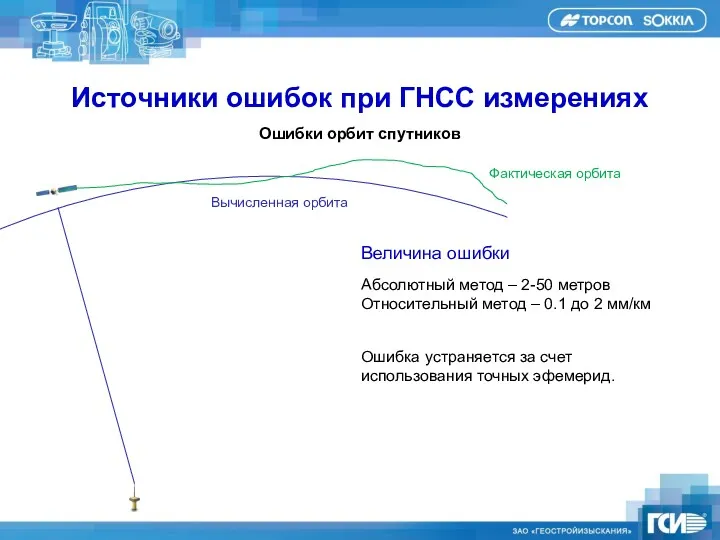
- 28. Вычисленная орбита Ошибка устраняется за счет использования точных эфемерид. Величина ошибки Абсолютный метод – 2-50 метров
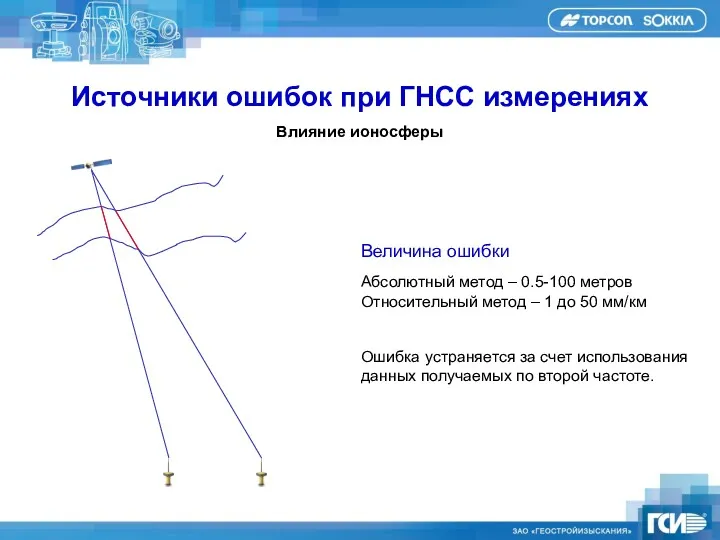
- 29. Величина ошибки Абсолютный метод – 0.5-100 метров Относительный метод – 1 до 50 мм/км Ошибка устраняется
- 30. Величина ошибки Абсолютный метод – мм…см Относительный метод – мм…см Ошибка устраняется за счет правильного выбора
- 31. По типу используемой ГНСС Односистемное Основные виды оборудования ГНСС Классификация GPS ГЛОНАСС Galileo GPS/ГЛОНАСС GPS/Galileo GPS/ГЛОНАСС/Galileo
- 32. По типу принимаемых сигналов Кодовое Фазовое Основные виды оборудования ГНСС Классификация
- 33. По количеству частот Основные виды оборудования ГНСС Классификация Одночастотное L1 Двухчастотное L1/L2 Многочастотное L1/L2/L5
- 34. По назначению оборудования Основные виды оборудования ГНСС Классификация Навигационное Геодезическое ГИС ОЕМ
- 35. По конструкции Основные виды оборудования ГНСС Классификация Модульное Интегрированное ОЕМ
- 36. X 2 X 2 X 2 ГНСС приемник Адаптер трегера Трегер Деревянный штатив (тяжелый) X 2
- 37. X 2 X 2 X 2 ГНСС приемник Адаптер трегера Трегер (с оптическим центриром) Деревянный штатив
- 38. ГНСС приемник Адаптер трегера Трегер (с оптическим центриром) Деревянный штатив (стандартный) Внешний GSM модем… …или внешний
- 39. RTK ровер ГНСС приемник Веха Полевой контроллер с ПО Крепление контроллера на веху Кабель приемник-контроллер Трипод
- 40. Статика и быстрая статика Виды работ, выполняемых ГНСС оборудованием Получение координат – после обработки Вид работ
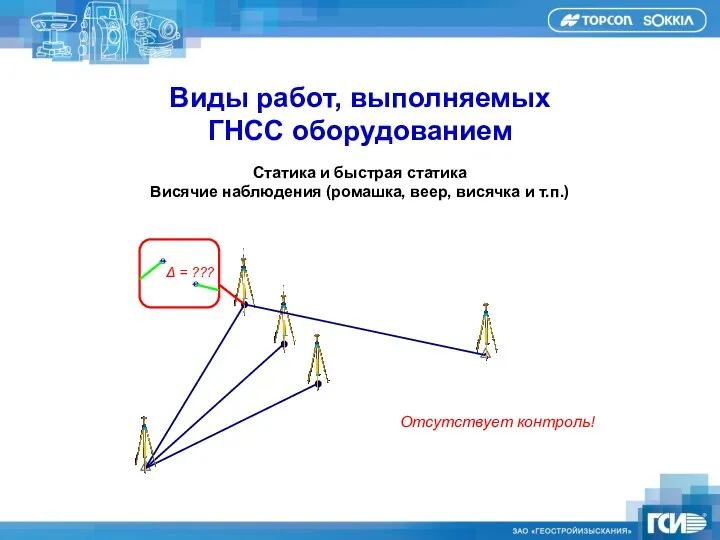
- 41. Виды работ, выполняемых ГНСС оборудованием Статика и быстрая статика Висячие наблюдения (ромашка, веер, висячка и т.п.)
- 42. Контроль только по сравнению полученных координат одного из исходных пунктов. Виды работ, выполняемых ГНСС оборудованием Статика
- 43. Возможность оценки измерений Виды работ, выполняемых ГНСС оборудованием Статика и быстрая статика Наблюдения в виде сети
- 44. Получение координат – в момент измерения Доп. условие – передача корректирующей информации Вид работ – съемка
- 45. Получение координат – в момент измерения Доп. условие – передача корректирующей информации Вид работ – съемка
- 46. Перезапуск RTK Перезапуск измерений при ухудшении условий наблюдений Виды работ, выполняемых ГНСС оборудованием Кинематика в режиме
- 47. Хорошие условия приема сигналов на базовом приемнике. Постоянные срывы слеживания спутников Малое число спутников Многолучевость Виды
- 48. Обязательные условия: Хорошие условия приема сигналов на базовом приемнике (открытая местность с минимальным числом помех) Обязательное
- 49. Плюсы: Нет оплаты услуг связи Работает в любой точке Земли Нет ограничения количества подключений Минусы: Требует
- 50. Плюсы: Работы на больших расстояниях (до 50 км) Минусы: Поминутная тарификация Зона обслуживания зависит от сотового
- 51. Плюсы: Работы на больших расстояниях (до 50 км) Одновременная работа нескольких пользователей (для встроенного модема до
- 52. Плюсы: Работы на больших расстояниях (до 50 км) Одновременная работа нескольких пользователей Тарификация за принятый трафик
- 54. Скачать презентацию
ГЛОБАЛЬНЫЕ
НАВИГАЦИОННЫЕ
СПУТНИКОВЫЕ СИСТЕМы
(ГНСС)
ГЛОБАЛЬНЫЕ
НАВИГАЦИОННЫЕ
СПУТНИКОВЫЕ СИСТЕМы
(ГНСС)

Основные элементы ГНСС
Наземная система управления и контроля (сегмент управления), включающая блоки
Основные элементы ГНСС
Наземная система управления и контроля (сегмент управления), включающая блоки
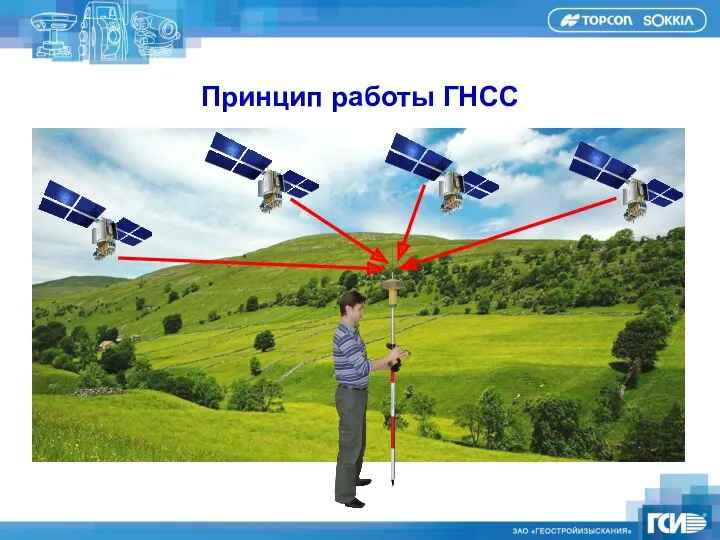
Принцип работы ГНСС
Принцип работы ГНСС
Принцип работы ГНСС
Принцип работы ГНСС

Основные области применения ГНСС
Геодезия
ГИС и картография
Управление строительной техникой
Основные области применения ГНСС
Геодезия
ГИС и картография
Управление строительной техникой
Действующие ГНСС
GPS – Global Positioning System. Принадлежит министерству обороны США. Этот
Действующие ГНСС
GPS – Global Positioning System. Принадлежит министерству обороны США. Этот
Создаваемые ГНСС
Galileo – Европейская система, находящаяся на этапе создания спутниковой группировки.
Создаваемые ГНСС
Galileo – Европейская система, находящаяся на этапе создания спутниковой группировки.
QZSS – «Квазизенитная спутниковая система», находящаяся на этапе создания спутниковой группировки
QZSS – «Квазизенитная спутниковая система», находящаяся на этапе создания спутниковой группировки
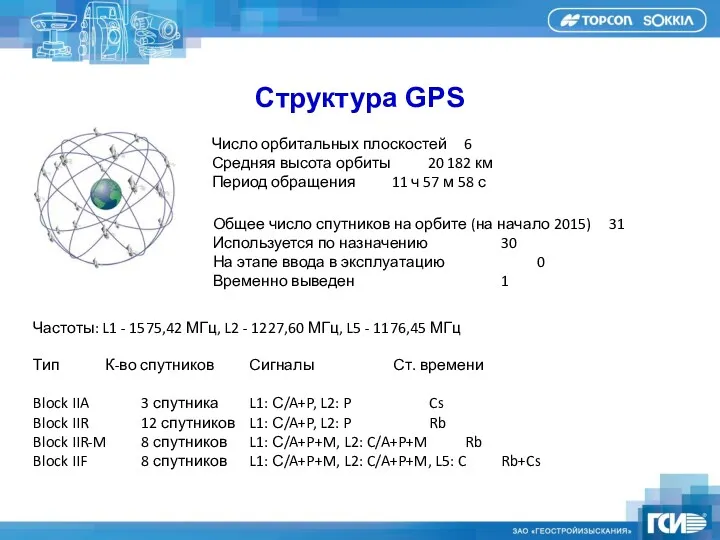
Структура GPS
Число орбитальных плоскостей 6
Средняя высота орбиты 20 182 км
Период обращения 11 ч 57
Структура GPS
Число орбитальных плоскостей 6
Средняя высота орбиты 20 182 км
Период обращения 11 ч 57
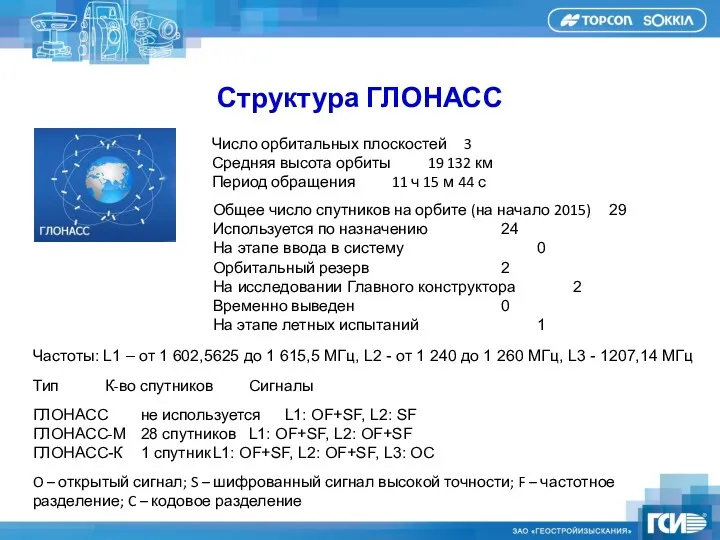
Структура ГЛОНАСС
Число орбитальных плоскостей 3
Средняя высота орбиты 19 132 км
Период обращения 11 ч 15
Структура ГЛОНАСС
Число орбитальных плоскостей 3
Средняя высота орбиты 19 132 км
Период обращения 11 ч 15

XYZ
XYZ
XYZ
XYZ
Абсолютный метод определения координат
XYZ
XYZ
XYZ
XYZ
XYZ
Абсолютный метод определения координат
XYZ
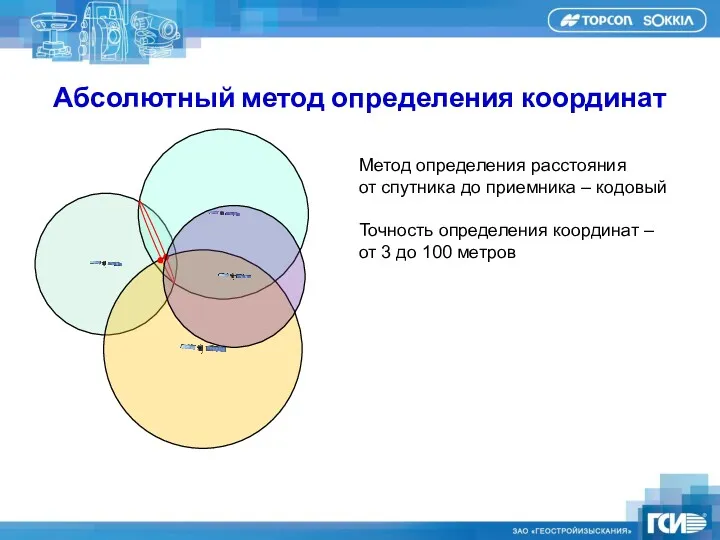
Метод определения расстояния
от спутника до приемника – кодовый
Точность определения координат –
Метод определения расстояния
от спутника до приемника – кодовый
Точность определения координат –
XYZ
XYZ
XYZ
XYZ
∆X ∆Y ∆Z
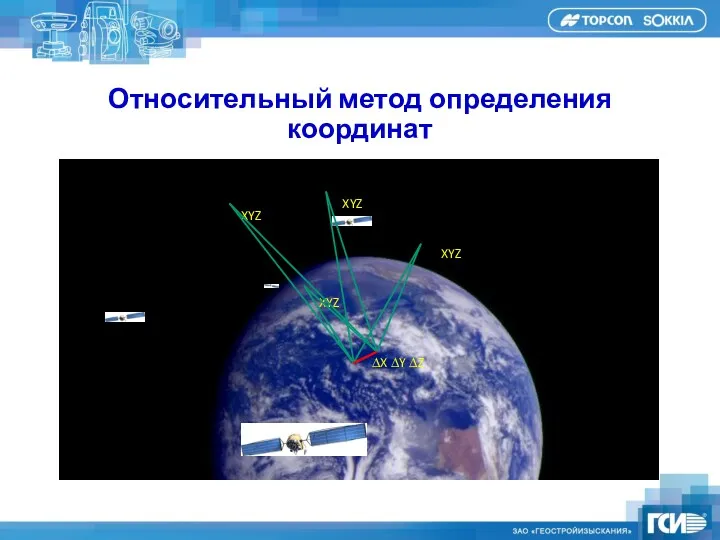
Относительный метод определения координат
XYZ
XYZ
XYZ
XYZ
∆X ∆Y ∆Z
Относительный метод определения координат

Метод определения расстояния от спутника до приемника – фазовый
Точность определения
Метод определения расстояния от спутника до приемника – фазовый
Точность определения
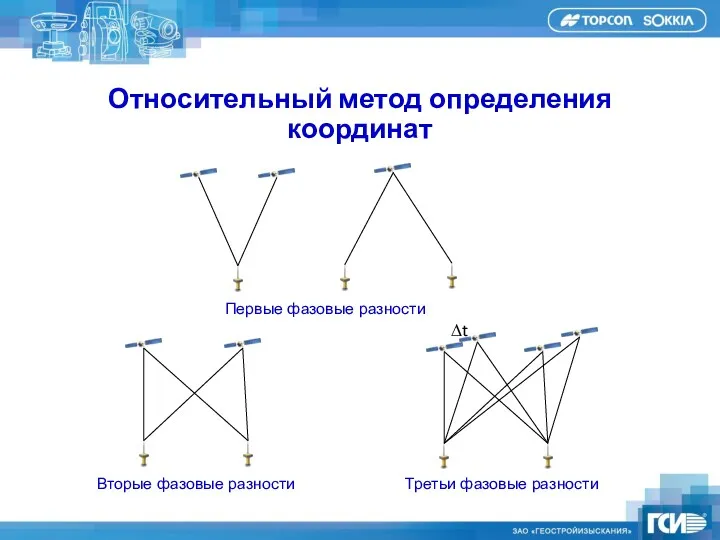
Первые фазовые разности
Вторые фазовые разности
Третьи фазовые разности
Относительный метод определения координат
Первые фазовые разности
Вторые фазовые разности
Третьи фазовые разности
Относительный метод определения координат
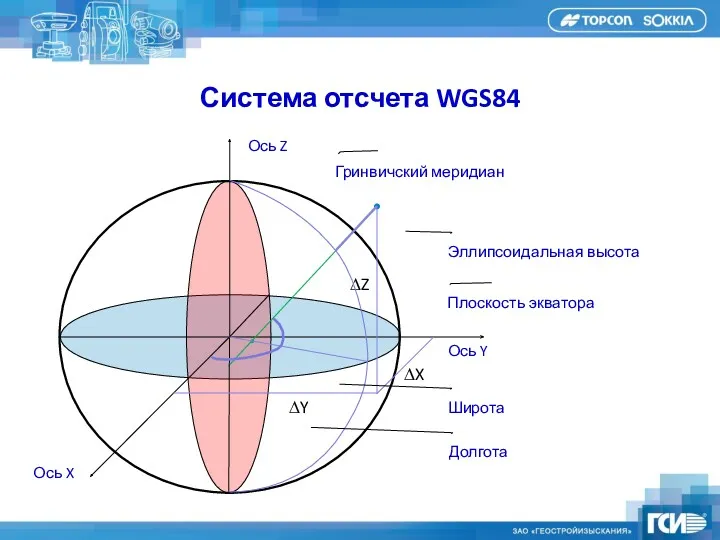
Система отсчета WGS84
Ось X
Ось Y
Ось Z
Плоскость экватора
Гринвичский меридиан
∆X
∆Y
∆Z
Эллипсоидальная высота
Широта
Долгота
Система отсчета WGS84
Ось X
Ось Y
Ось Z
Плоскость экватора
Гринвичский меридиан
∆X
∆Y
∆Z
Эллипсоидальная высота
Широта
Долгота
XYZ
или
BLH
XYZ
или
BLH
Плоские к-ты
Параметры
ИГД
Параметры
проекции
Переход к местным системам координат
Использование параметров
XYZ
или
BLH
XYZ
или
BLH
Плоские к-ты
Параметры
ИГД
Параметры
проекции
Переход к местным системам координат
Использование параметров
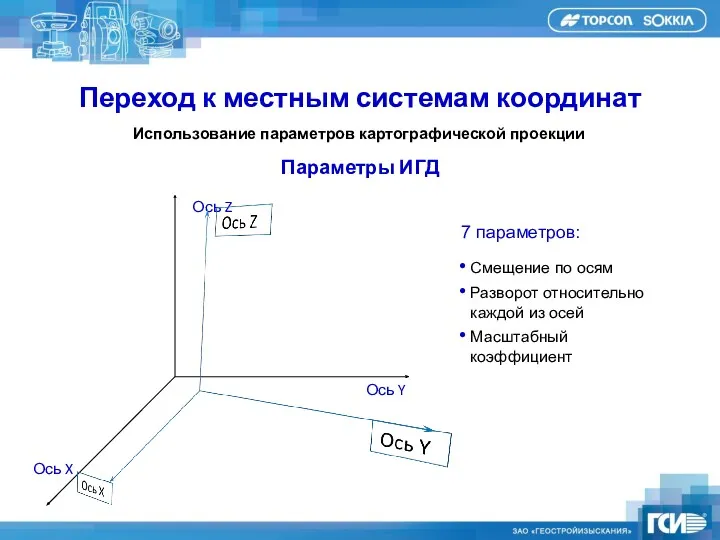
7 параметров:
Смещение по осям
Разворот относительно каждой из осей
Масштабный коэффициент
Ось X
Ось
7 параметров:
Смещение по осям
Разворот относительно каждой из осей
Масштабный коэффициент
Ось X
Ось

5 параметров:
Осевой меридиан
Широта начала отсчета
Условное смещение на восток
Условное смещение на
5 параметров:
Осевой меридиан
Широта начала отсчета
Условное смещение на восток
Условное смещение на
Переход к местным системам координат
Использование параметров картографической проекции
Проекции используемые в РФ
Переход к местным системам координат
Использование параметров картографической проекции
Проекции используемые в РФ

XYZ
или
BLH
XYZ
или
BLH
Условные плоские
к-ты
Параметры
ИГД
Параметры
условной проекции
Условные плоские
к-ты
Параметры
конформного преобразования
Плоские к-ты
XYZ
или
BLH
XYZ
или
BLH
Условные плоские
к-ты
Параметры
ИГД
Параметры
условной проекции
Условные плоские
к-ты
Параметры
конформного преобразования
Плоские к-ты
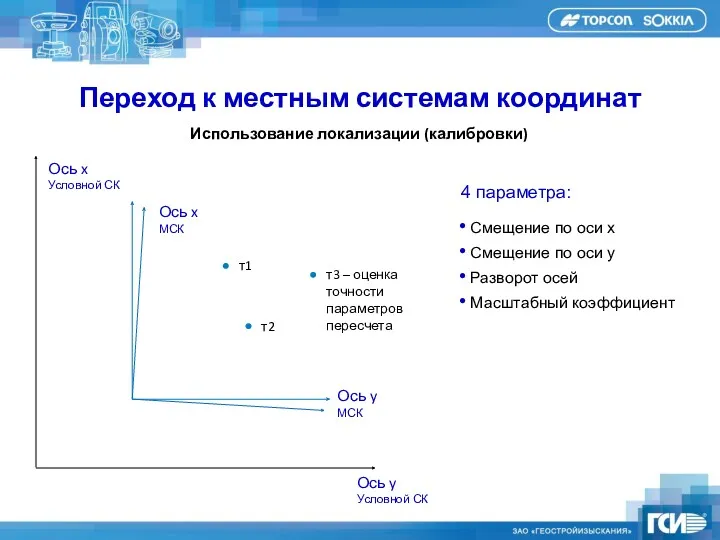
Ось y
Условной СК
Ось x
Условной СК
т1
т2
т3 – оценка
точности
параметров пересчета
Ось x
МСК
Ось y
МСК
Ось y
Условной СК
Ось x
Условной СК
т1
т2
т3 – оценка
точности
параметров пересчета
Ось x
МСК
Ось y
МСК
Условные СК
WGS84 – используется стереографическая проекция на эллипсоиде WGS84,
Что ведет
Условные СК
WGS84 – используется стереографическая проекция на эллипсоиде WGS84,
Что ведет
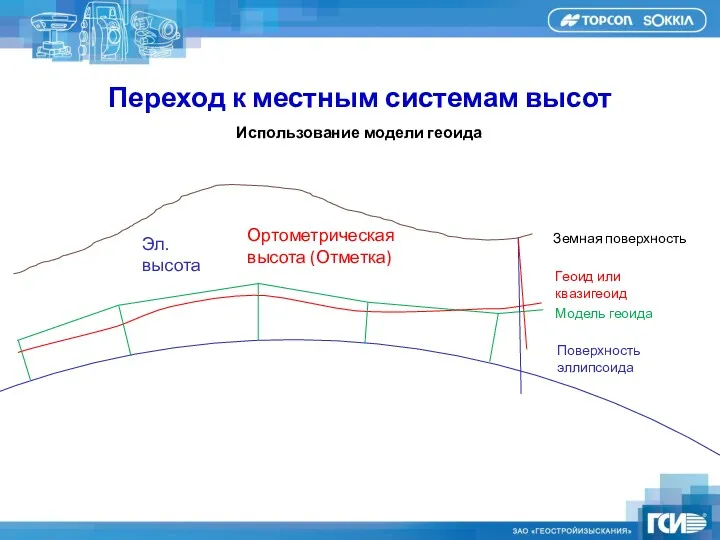
Земная поверхность
Поверхность
эллипсоида
Модель геоида
Геоид или
квазигеоид
Эл. высота
Ортометрическая высота (Отметка)
Переход к местным системам высот
Использование
Земная поверхность
Поверхность
эллипсоида
Модель геоида
Геоид или
квазигеоид
Эл. высота
Ортометрическая высота (Отметка)
Переход к местным системам высот
Использование
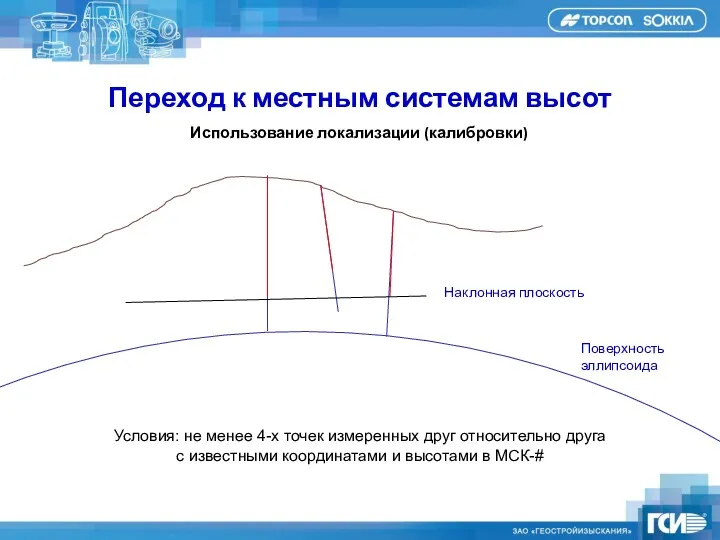
Поверхность
эллипсоида
Наклонная плоскость
Условия: не менее 4-х точек измеренных друг относительно друга
с известными
Поверхность
эллипсоида
Наклонная плоскость
Условия: не менее 4-х точек измеренных друг относительно друга
с известными
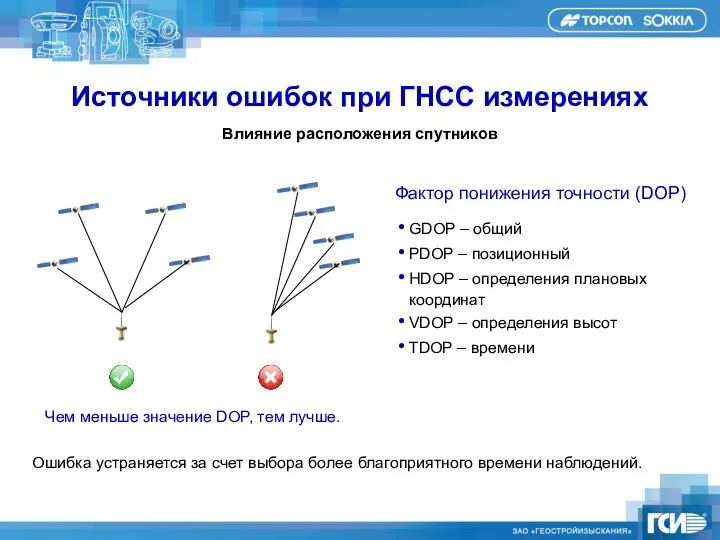
Фактор понижения точности (DOP)
GDOP – общий
PDOP – позиционный
HDOP – определения плановых
Фактор понижения точности (DOP)
GDOP – общий
PDOP – позиционный
HDOP – определения плановых
Вычисленная орбита
Ошибка устраняется за счет использования точных эфемерид.
Величина ошибки
Абсолютный метод –
Вычисленная орбита
Ошибка устраняется за счет использования точных эфемерид.
Величина ошибки
Абсолютный метод –
Величина ошибки
Абсолютный метод – 0.5-100 метров
Относительный метод – 1 до 50
Величина ошибки
Абсолютный метод – 0.5-100 метров
Относительный метод – 1 до 50

Величина ошибки
Абсолютный метод – мм…см
Относительный метод – мм…см
Ошибка устраняется за счет
Величина ошибки
Абсолютный метод – мм…см
Относительный метод – мм…см
Ошибка устраняется за счет
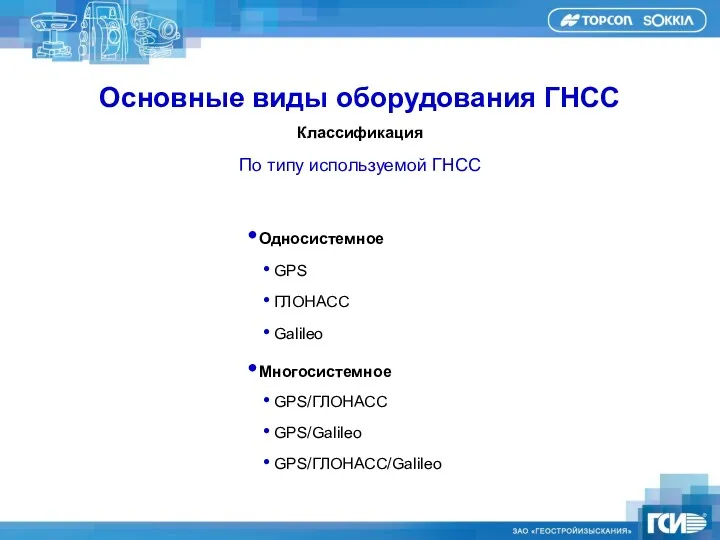
По типу используемой ГНСС
Односистемное
Основные виды оборудования ГНСС
Классификация
GPS
ГЛОНАСС
Galileo
GPS/ГЛОНАСС
GPS/Galileo
GPS/ГЛОНАСС/Galileo
Многосистемное
По типу используемой ГНСС
Односистемное
Основные виды оборудования ГНСС
Классификация
GPS
ГЛОНАСС
Galileo
GPS/ГЛОНАСС
GPS/Galileo
GPS/ГЛОНАСС/Galileo
Многосистемное

По типу принимаемых сигналов
Кодовое
Фазовое
Основные виды оборудования ГНСС
Классификация
По типу принимаемых сигналов
Кодовое
Фазовое
Основные виды оборудования ГНСС
Классификация

По количеству частот
Основные виды оборудования ГНСС
Классификация
Одночастотное
L1
Двухчастотное
L1/L2
Многочастотное
L1/L2/L5
По количеству частот
Основные виды оборудования ГНСС
Классификация
Одночастотное
L1
Двухчастотное
L1/L2
Многочастотное
L1/L2/L5

По назначению оборудования
Основные виды оборудования ГНСС
Классификация
Навигационное
Геодезическое
ГИС
ОЕМ
По назначению оборудования
Основные виды оборудования ГНСС
Классификация
Навигационное
Геодезическое
ГИС
ОЕМ

По конструкции
Основные виды оборудования ГНСС
Классификация
Модульное
Интегрированное
ОЕМ
По конструкции
Основные виды оборудования ГНСС
Классификация
Модульное
Интегрированное
ОЕМ

X 2
X 2
X 2
ГНСС приемник
Адаптер трегера
Трегер
Деревянный штатив (тяжелый)
X 2
Дополнительно:
Внешнее питание
Общий принцип
X 2
X 2
X 2
ГНСС приемник
Адаптер трегера
Трегер
Деревянный штатив (тяжелый)
X 2
Дополнительно:
Внешнее питание
Общий принцип

X 2
X 2
X 2
ГНСС приемник
Адаптер трегера
Трегер (с оптическим центриром)
Деревянный штатив (стандартный)
X
X 2
X 2
X 2
ГНСС приемник
Адаптер трегера
Трегер (с оптическим центриром)
Деревянный штатив (стандартный)
X

ГНСС приемник
Адаптер трегера
Трегер (с оптическим центриром)
Деревянный штатив (стандартный)
Внешний GSM модем…
…или внешний
ГНСС приемник
Адаптер трегера
Трегер (с оптическим центриром)
Деревянный штатив (стандартный)
Внешний GSM модем…
…или внешний

RTK ровер
ГНСС приемник
Веха
Полевой контроллер с ПО
Крепление контроллера
на веху
Кабель
приемник-контроллер
Трипод или бипод
Принимающий GSM…
…
RTK ровер
ГНСС приемник
Веха
Полевой контроллер с ПО
Крепление контроллера
на веху
Кабель
приемник-контроллер
Трипод или бипод
Принимающий GSM…
…

Статика и быстрая статика
Виды работ, выполняемых
ГНСС оборудованием
Получение координат – после обработки
Вид
Статика и быстрая статика
Виды работ, выполняемых
ГНСС оборудованием
Получение координат – после обработки
Вид
Виды работ, выполняемых
ГНСС оборудованием
Статика и быстрая статика
Висячие наблюдения (ромашка, веер, висячка
Виды работ, выполняемых
ГНСС оборудованием
Статика и быстрая статика
Висячие наблюдения (ромашка, веер, висячка
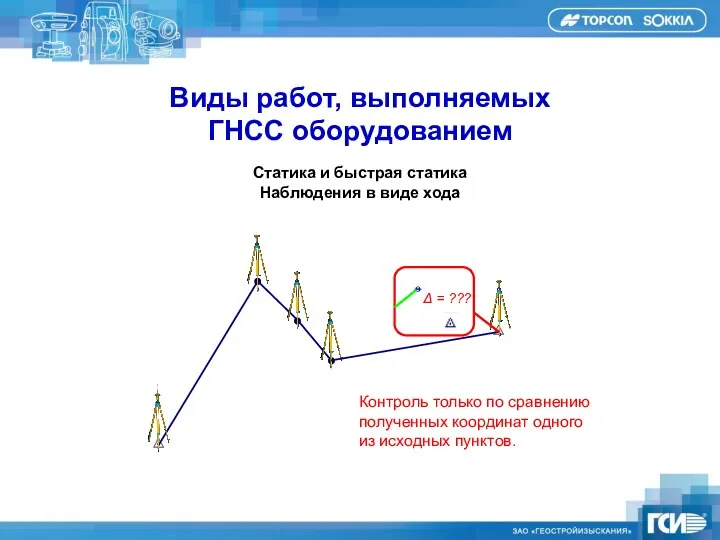
Контроль только по сравнению полученных координат одного из исходных пунктов.
Виды работ,
Контроль только по сравнению полученных координат одного из исходных пунктов.
Виды работ,
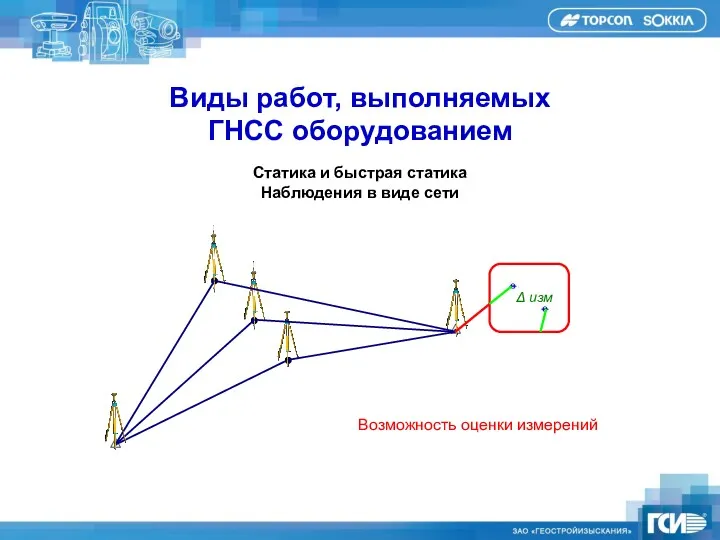
Возможность оценки измерений
Виды работ, выполняемых
ГНСС оборудованием
Статика и быстрая статика
Наблюдения в виде
Возможность оценки измерений
Виды работ, выполняемых
ГНСС оборудованием
Статика и быстрая статика
Наблюдения в виде

Получение координат – в момент измерения
Доп. условие – передача корректирующей информации
Вид
Получение координат – в момент измерения
Доп. условие – передача корректирующей информации
Вид

Получение координат – в момент измерения
Доп. условие – передача корректирующей информации
Вид
Получение координат – в момент измерения
Доп. условие – передача корректирующей информации
Вид

Перезапуск RTK
Перезапуск измерений при ухудшении условий наблюдений
Виды работ, выполняемых
ГНСС оборудованием
Кинематика в
Перезапуск RTK
Перезапуск измерений при ухудшении условий наблюдений
Виды работ, выполняемых
ГНСС оборудованием
Кинематика в

Хорошие условия приема сигналов на базовом приемнике.
Постоянные срывы слеживания спутников
Малое
Хорошие условия приема сигналов на базовом приемнике.
Постоянные срывы слеживания спутников
Малое
Обязательные условия:
Хорошие условия приема сигналов на базовом приемнике
(открытая местность с
Обязательные условия:
Хорошие условия приема сигналов на базовом приемнике
(открытая местность с

Плюсы:
Нет оплаты услуг связи
Работает в любой точке Земли
Нет
Плюсы:
Нет оплаты услуг связи
Работает в любой точке Земли
Нет

Плюсы:
Работы на больших расстояниях (до 50 км)
Минусы:
Поминутная тарификация
Плюсы:
Работы на больших расстояниях (до 50 км)
Минусы:
Поминутная тарификация

Плюсы:
Работы на больших расстояниях (до 50 км)
Одновременная работа нескольких
Плюсы:
Работы на больших расстояниях (до 50 км)
Одновременная работа нескольких

Плюсы:
Работы на больших расстояниях (до 50 км)
Одновременная работа нескольких
Плюсы:
Работы на больших расстояниях (до 50 км)
Одновременная работа нескольких
 SEO-продвижение сайта
SEO-продвижение сайта Графический дизайн лондонского метрополитена
Графический дизайн лондонского метрополитена Предложение о сотрудничестве. Продажа спортивной одежды и обуви от бренда 361°. Лето
Предложение о сотрудничестве. Продажа спортивной одежды и обуви от бренда 361°. Лето Special Effects
Special Effects Сервис Life Club
Сервис Life Club ООО Дельтапром. Благоустройство и озеленение территорий, строительство и ремонт автомобильных дорог и аэродромов
ООО Дельтапром. Благоустройство и озеленение территорий, строительство и ремонт автомобильных дорог и аэродромов Стандарты обслуживания и техника продаж
Стандарты обслуживания и техника продаж Вопросы на понимание
Вопросы на понимание Добро пожаловать в PowerPoint. Новые функции
Добро пожаловать в PowerPoint. Новые функции Анализ конкурентов
Анализ конкурентов Мастер-класс. Тренды привлечения клиентов из вКонтакте, Facebook и других в 2018 году
Мастер-класс. Тренды привлечения клиентов из вКонтакте, Facebook и других в 2018 году Сервисное обслуживание насосов дозаторов
Сервисное обслуживание насосов дозаторов Концептуальный маркетинг и упаковка бизнеса
Концептуальный маркетинг и упаковка бизнеса Выездной свадебный коктейль бар
Выездной свадебный коктейль бар Креативные решения международных брендов
Креативные решения международных брендов Стратегические лидеры
Стратегические лидеры Орифлейм компаниясының мүмкіндіктері
Орифлейм компаниясының мүмкіндіктері Анализ компании Кока-Кола
Анализ компании Кока-Кола Оптово-розничный центр срочного изготовления очков Т-Оптика
Оптово-розничный центр срочного изготовления очков Т-Оптика Pierre cardin baby white
Pierre cardin baby white Введение. Маркетинг, как концепция рыночного управления
Введение. Маркетинг, как концепция рыночного управления Технологии Public Relations. (Тема 5)
Технологии Public Relations. (Тема 5) Химические методы анализа
Химические методы анализа Гид по подаркам. Мэри Кэй
Гид по подаркам. Мэри Кэй Спутниковое ТВ МТС: продукты и акции
Спутниковое ТВ МТС: продукты и акции Маркетинговая среда. Анализ рынка, предпочтений и мотивации потребителя, предприятия. (Тема 3)
Маркетинговая среда. Анализ рынка, предпочтений и мотивации потребителя, предприятия. (Тема 3) Маркетинг в здравоохранении
Маркетинг в здравоохранении Organic cosmetics by Mary&Daria
Organic cosmetics by Mary&Daria