- ООО НПО Ка-технологии. Создание инновационных радаров VI поколения

Содержание
- 2. ПУТИ РАЗВИТИЯ СОВРЕМЕННЫХ РЛ СИСТЕМ
- 3. Разработка радиолокационных систем
- 4. Разработка радиолокационных систем
- 5. Разработка радиолокационных систем 2. 4 ГЦМП г. Знаменск, апрель – май 2013 года Директива начальника Генштаба
- 6. Разработка радиолокационных систем
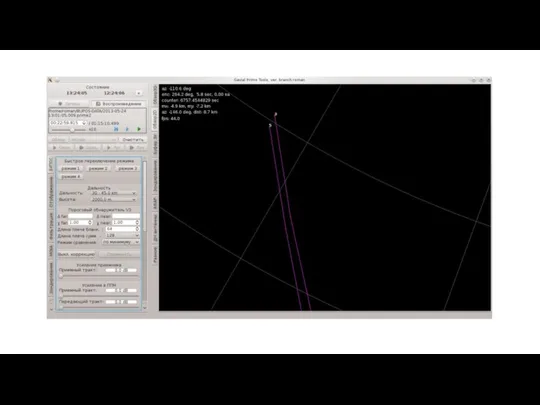
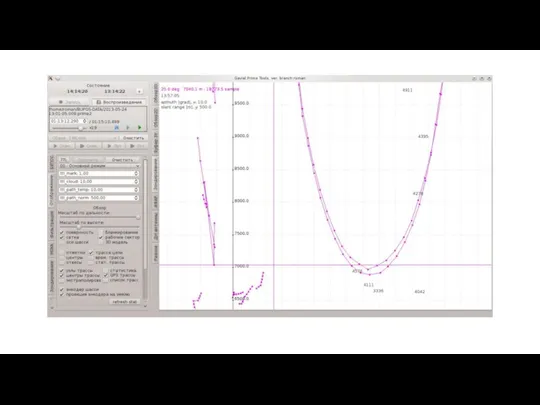
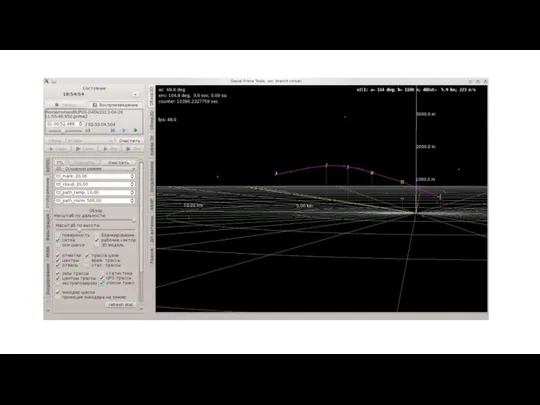
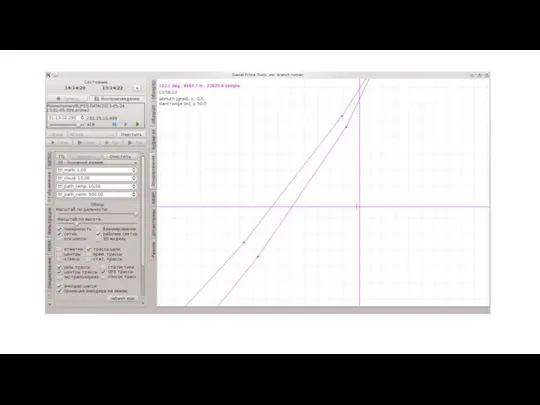
- 7. Трасса БПЛА типа Bird-Eye Птицы Птицы
- 12. Разработка радиолокационных систем
- 13. Разработка радиолокационных систем 3. 19 ИП МО г. Санкт-Петербург, июль 2013 г. Во исполнение указаний Начальника
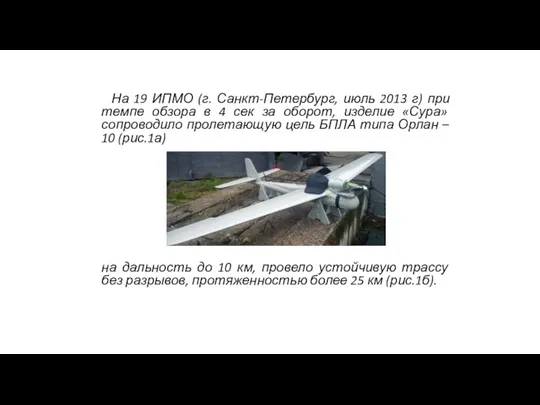
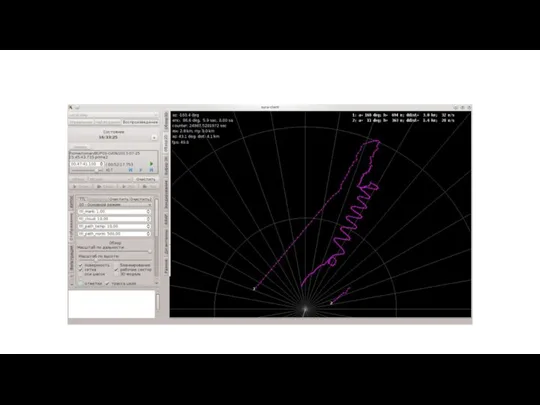
- 14. Разработка радиолокационных систем На 19 ИПМО (г. Санкт-Петербург, июль 2013 г) при темпе обзора в 4
- 15. Разработка радиолокационных систем
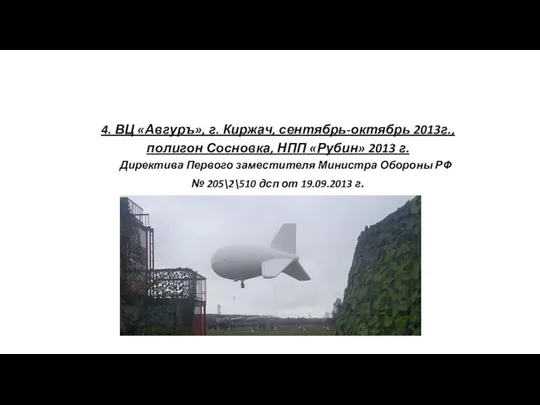
- 16. Разработка радиолокационных систем 4. ВЦ «Авгуръ», г. Киржач, сентябрь-октябрь 2013г., полигон Сосновка, НПП «Рубин» 2013 г.
- 17. Разработка радиолокационных систем
- 18. Разработка радиолокационных систем
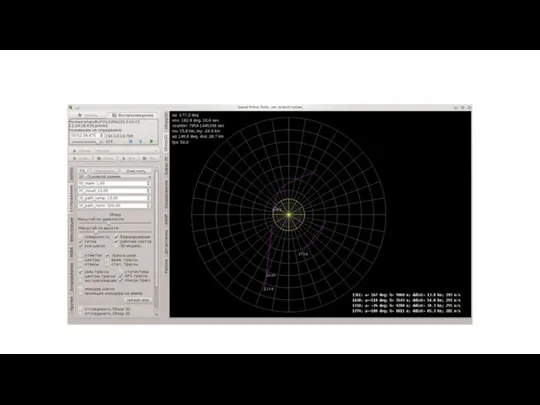
- 19. Разработка радиолокационных систем На испытательном полигоне «Сосновка», «НПП «Рубин» (г. Пенза, ноябрь 2013г.) при темпе обзора
- 20. Высокоточная РЛС на основе АФАР, с электронным управлением диаграммой на передачу и прием в азимутальной и
- 21. ДИАПАЗОН СКОРОСТЕЙ ЦЕЛЕЙ ДОСТУПНЫХ РЛК ТИПЫ ЦЕЛЕЙ И ИХ ДИАПАЗОН СКОРОСТЕЙ ДОСТУПНЫЕ РЛК 0,1 100 1
- 22. С полностью электронным сканирование в секторе 360 градусов по азимуту С электронным сканирование в секторе 45
- 23. Возможности разрешения групповой цели для РЛС Традиционные РЛС Разрешаемый объём РЛС со СКИ В групповой цели
- 24. ПРЕИМУЩЕСТВА ПРИ РАБОТЕ РЛС СО СКИ В СЛОЖНОЙ ФОНОВОЙ ОБСТАНОВКЕ Традиционные РЛС РЛС со СКИ Различия
- 25. Протяженность «мертвой» зоны А. Мертвая зона традиционной РЛС В. Мертвая зона РЛС со СКИ сигналом Протяженность
- 27. Точность измерения координат цели Эллипс ошибки традиционной РЛС
- 28. Точность измерения координат цели Эллипс ошибки для СКИ РЛС
- 29. Радиолокационная станция с ЦИАФАР РЛС с ЦИАФАР с применением СКИ импульсов предназначена для обнаружения самолетов, вертолетов,
- 31. Скачать презентацию

ПУТИ РАЗВИТИЯ СОВРЕМЕННЫХ РЛ СИСТЕМ
ПУТИ РАЗВИТИЯ СОВРЕМЕННЫХ РЛ СИСТЕМ

Разработка радиолокационных систем
Разработка радиолокационных систем

Разработка радиолокационных систем
Разработка радиолокационных систем
Разработка радиолокационных систем
2. 4 ГЦМП г. Знаменск, апрель – май 2013
Разработка радиолокационных систем
2. 4 ГЦМП г. Знаменск, апрель – май 2013
Разработка радиолокационных систем
Разработка радиолокационных систем
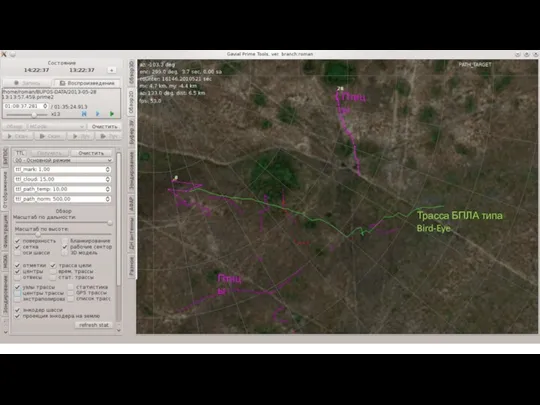
Трасса БПЛА типа Bird-Eye
Птицы
Птицы
Трасса БПЛА типа Bird-Eye
Птицы
Птицы

Разработка радиолокационных систем
Разработка радиолокационных систем
Разработка радиолокационных систем
3. 19 ИП МО г. Санкт-Петербург, июль 2013 г.
Во
Разработка радиолокационных систем
3. 19 ИП МО г. Санкт-Петербург, июль 2013 г.
Во
Разработка радиолокационных систем
На 19 ИПМО (г. Санкт-Петербург, июль 2013 г) при
Разработка радиолокационных систем
На 19 ИПМО (г. Санкт-Петербург, июль 2013 г) при
Разработка радиолокационных систем
Разработка радиолокационных систем
Разработка радиолокационных систем
4. ВЦ «Авгуръ», г. Киржач, сентябрь-октябрь 2013г.,
полигон Сосновка,
Разработка радиолокационных систем
4. ВЦ «Авгуръ», г. Киржач, сентябрь-октябрь 2013г.,
полигон Сосновка,

Разработка радиолокационных систем
Разработка радиолокационных систем
Разработка радиолокационных систем
Разработка радиолокационных систем
Разработка радиолокационных систем
На испытательном полигоне «Сосновка», «НПП «Рубин» (г. Пенза, ноябрь
Разработка радиолокационных систем
На испытательном полигоне «Сосновка», «НПП «Рубин» (г. Пенза, ноябрь
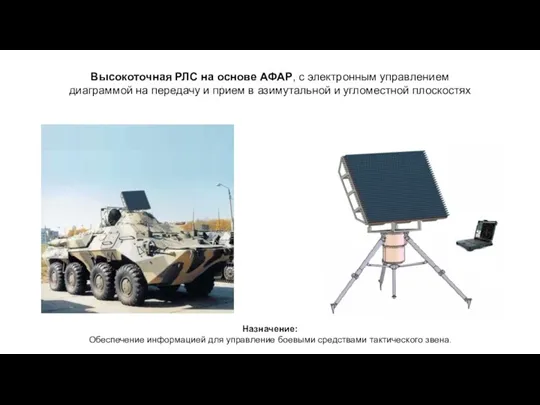
Высокоточная РЛС на основе АФАР, с электронным управлением диаграммой на передачу
Высокоточная РЛС на основе АФАР, с электронным управлением диаграммой на передачу
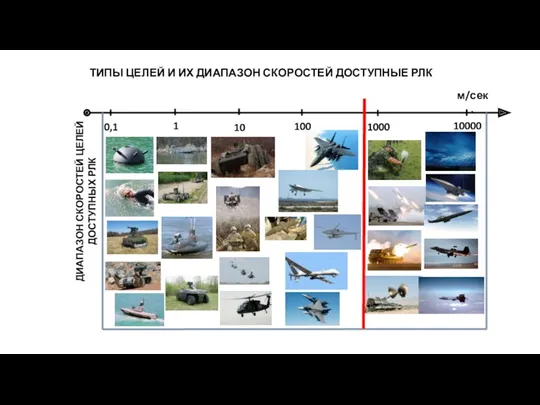
ДИАПАЗОН СКОРОСТЕЙ ЦЕЛЕЙ ДОСТУПНЫХ РЛК
ТИПЫ ЦЕЛЕЙ И ИХ ДИАПАЗОН СКОРОСТЕЙ ДОСТУПНЫЕ
ДИАПАЗОН СКОРОСТЕЙ ЦЕЛЕЙ ДОСТУПНЫХ РЛК
ТИПЫ ЦЕЛЕЙ И ИХ ДИАПАЗОН СКОРОСТЕЙ ДОСТУПНЫЕ
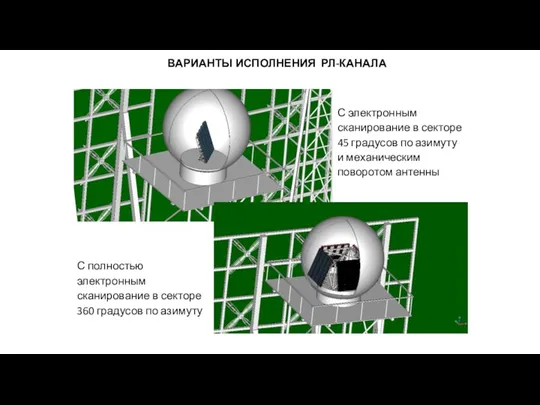
С полностью электронным сканирование в секторе 360 градусов по азимуту
С
С полностью электронным сканирование в секторе 360 градусов по азимуту
С
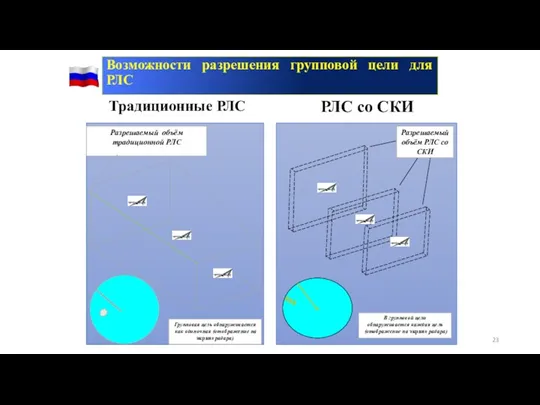
Возможности разрешения групповой цели для РЛС
Традиционные РЛС
Разрешаемый объём РЛС со СКИ
В
Возможности разрешения групповой цели для РЛС
Традиционные РЛС
Разрешаемый объём РЛС со СКИ
В
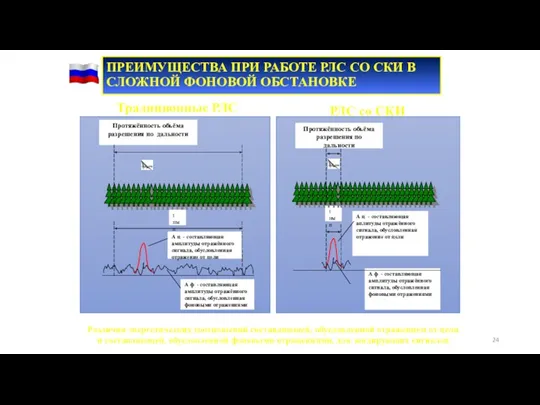
ПРЕИМУЩЕСТВА ПРИ РАБОТЕ РЛС СО СКИ В СЛОЖНОЙ ФОНОВОЙ ОБСТАНОВКЕ
Традиционные РЛС
РЛС
ПРЕИМУЩЕСТВА ПРИ РАБОТЕ РЛС СО СКИ В СЛОЖНОЙ ФОНОВОЙ ОБСТАНОВКЕ
Традиционные РЛС
РЛС
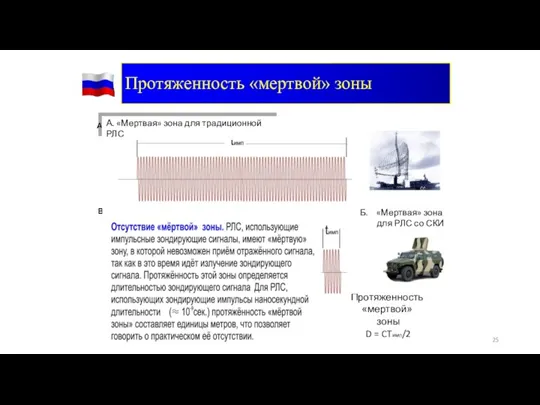
Протяженность «мертвой» зоны
А. Мертвая зона традиционной РЛС
В. Мертвая зона РЛС со
Протяженность «мертвой» зоны
А. Мертвая зона традиционной РЛС
В. Мертвая зона РЛС со

Точность измерения координат цели
Эллипс ошибки традиционной РЛС
Точность измерения координат цели
Эллипс ошибки традиционной РЛС

Точность измерения координат цели
Эллипс ошибки для СКИ РЛС
Точность измерения координат цели
Эллипс ошибки для СКИ РЛС

Радиолокационная станция с ЦИАФАР
РЛС с ЦИАФАР с применением СКИ импульсов
Радиолокационная станция с ЦИАФАР
РЛС с ЦИАФАР с применением СКИ импульсов
 Реклама на транспорте
Реклама на транспорте Эмпатия
Эмпатия Новая программа лояльности Faberlic
Новая программа лояльности Faberlic The coca-cola company
The coca-cola company Наш портфель
Наш портфель Стратегии развития тур индустрии в странах и регионах мира. Лекция 2
Стратегии развития тур индустрии в странах и регионах мира. Лекция 2 Анализ качества батонов , приобретенных в различных торговых сетях
Анализ качества батонов , приобретенных в различных торговых сетях Новый формат праздничных открытий. Канал франчайзинг
Новый формат праздничных открытий. Канал франчайзинг Партнёрская деятельность в Сибирском федеральном университете
Партнёрская деятельность в Сибирском федеральном университете Управление маркетинговой деятельностью компании
Управление маркетинговой деятельностью компании Обмен, торговля и реклама
Обмен, торговля и реклама Презентация разработки СТЗ
Презентация разработки СТЗ Обучение. Видеонаблюдение в умном доме. Ростелеком
Обучение. Видеонаблюдение в умном доме. Ростелеком Маркетинговые стратегии корпоративного уровня
Маркетинговые стратегии корпоративного уровня Корма Purina для птицы
Корма Purina для птицы Тестовый день. О компании и услуге
Тестовый день. О компании и услуге Компания Русагро
Компания Русагро Процесс доставки RSA
Процесс доставки RSA Тарифы Водофон
Тарифы Водофон CM MU(μ) Engine
CM MU(μ) Engine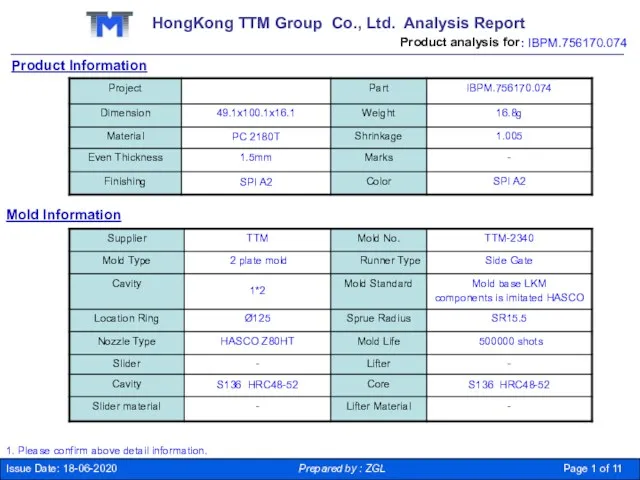 HongKong TTM Group Co
HongKong TTM Group Co Обновленная политика ADM. BEK AIR
Обновленная политика ADM. BEK AIR Учет и аудит товаров в организации ООО Компакт
Учет и аудит товаров в организации ООО Компакт Маркетинговое исследование эффективности применения СП ОАО GEFEST наступательной стратегии
Маркетинговое исследование эффективности применения СП ОАО GEFEST наступательной стратегии Разработчик компьютерных игр компания Mysticism Games
Разработчик компьютерных игр компания Mysticism Games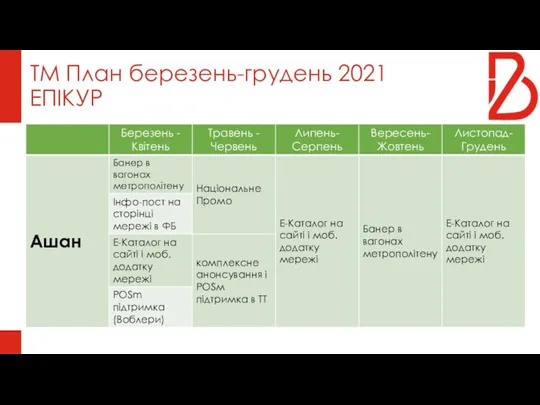 ТМ-план березень-грудень 2021 Чебатурочка, Eпікур
ТМ-план березень-грудень 2021 Чебатурочка, Eпікур Рекомендации по выкладке товара. Гипермаркет Cotton Club
Рекомендации по выкладке товара. Гипермаркет Cotton Club Мороженое Пломбир
Мороженое Пломбир