- 14. Поворот, параллельный перенос, осевая и центральная симметрия

Содержание
- 2. Поворот
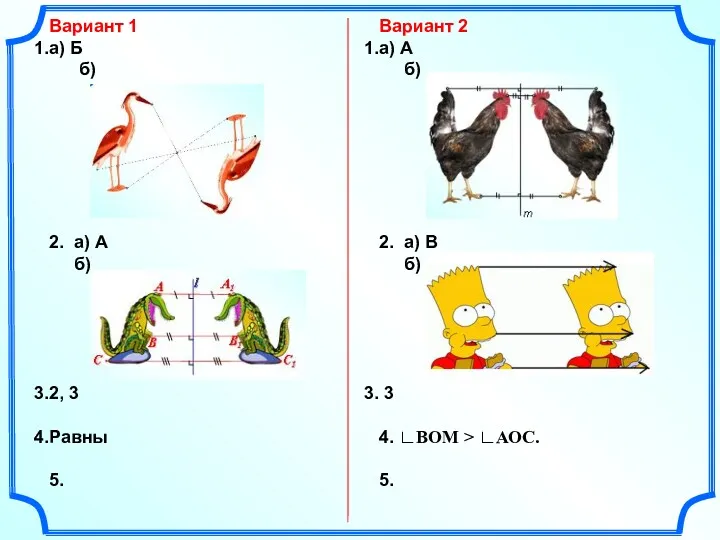
- 3. Вариант 1 а) Б б) 2. а) А б) 2, 3 Равны 5. Вариант 2 а)
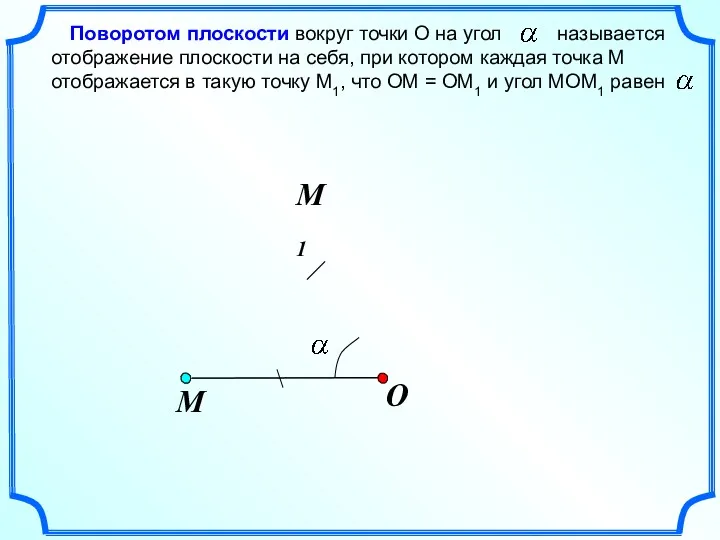
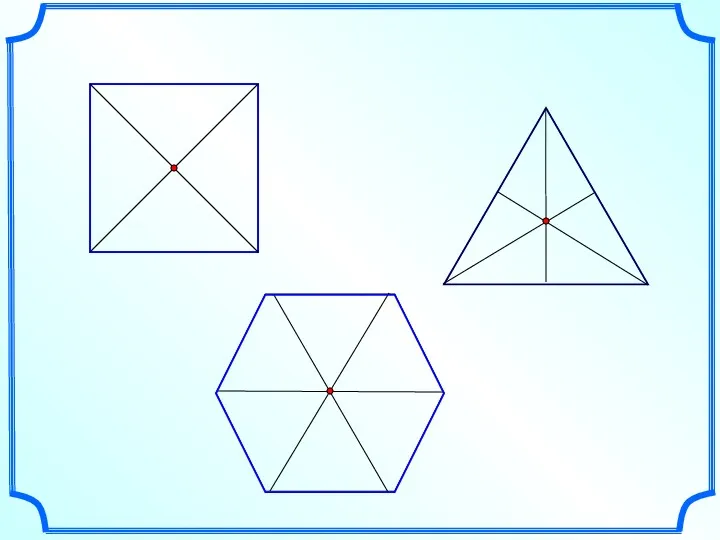
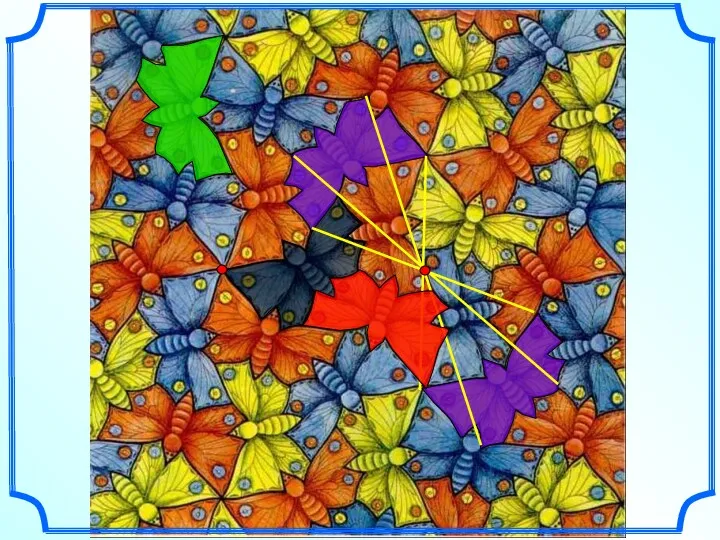
- 4. O Поворотом плоскости вокруг точки О на угол называется отображение плоскости на себя, при котором каждая
- 5. Угол поворота 600 М О М1
- 6. Алгоритм построения образа точки М при повороте вокруг точки О на угол α Проводим луч ОМ;
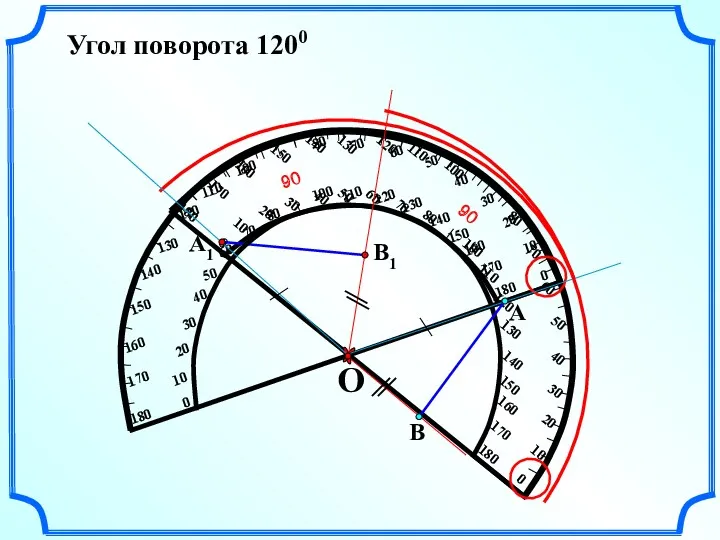
- 7. О В А В1 А1 Угол поворота 1200
- 8. Поворот отрезка. В В1 D D1 C1 C
- 9. Дано: поворот. Доказать: поворот является движением. Доказательство: 1. Поворот точек М и N на угол α
- 13. Скачать презентацию
Поворот
Поворот
Вариант 1
а) Б
б)
2. а) А
б)
2, 3
Равны
5.
Вариант 2
а)
Вариант 1
а) Б
б)
2. а) А
б)
2, 3
Равны
5.
Вариант 2
а)
O
Поворотом плоскости вокруг точки О на угол называется отображение плоскости
O
Поворотом плоскости вокруг точки О на угол называется отображение плоскости
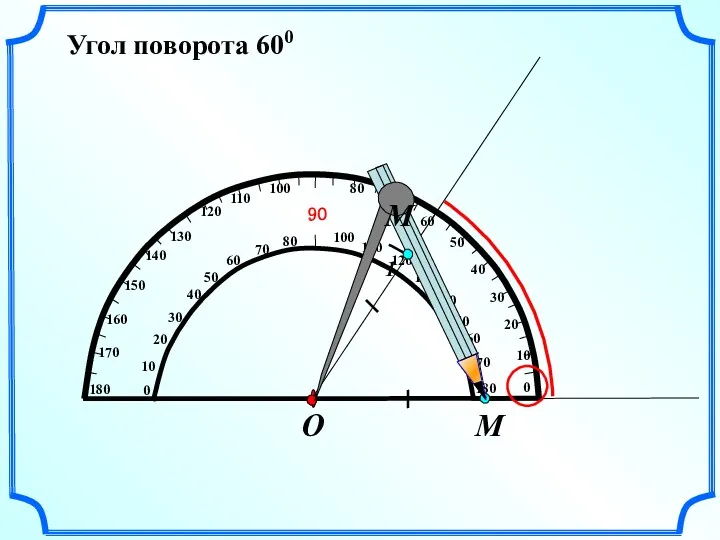
Угол поворота 600
М
О
М1
Угол поворота 600
М
О
М1
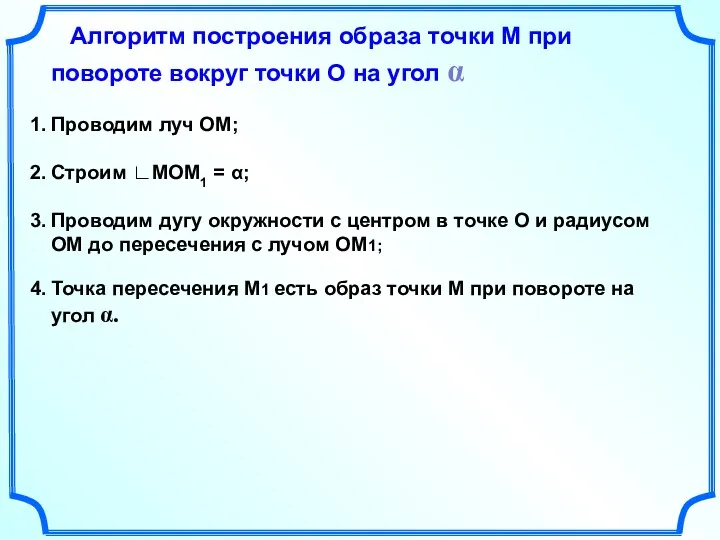
Алгоритм построения образа точки М при повороте вокруг точки О
Алгоритм построения образа точки М при повороте вокруг точки О
О
В
А
В1
А1
Угол поворота 1200
О
В
А
В1
А1
Угол поворота 1200
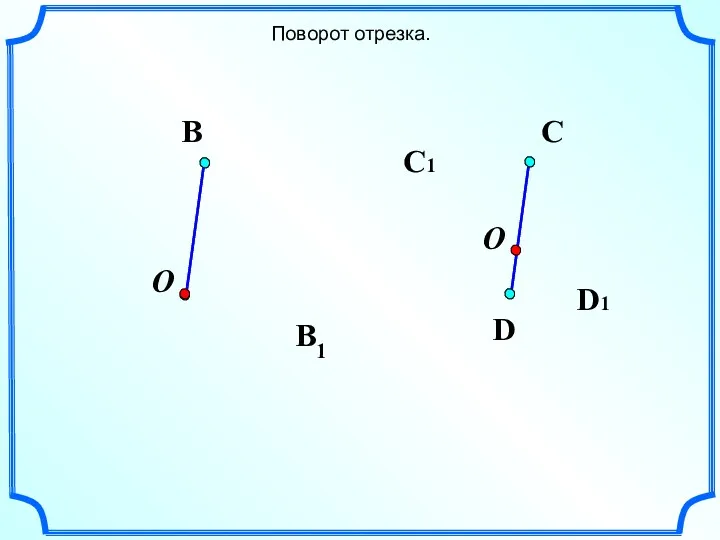
Поворот отрезка.
В
В1
D
D1
C1
C
Поворот отрезка.
В
В1
D
D1
C1
C
Дано: поворот.
Доказать: поворот является движением.
Доказательство:
1. Поворот точек М и N
Дано: поворот.
Доказать: поворот является движением.
Доказательство:
1. Поворот точек М и N
 Многогранники. Виды многогранников
Многогранники. Виды многогранников Задачі на знаходження невідомого доданка
Задачі на знаходження невідомого доданка Деление многозначного числа на однозначное
Деление многозначного числа на однозначное Математика. Решение задач. Закрепление
Математика. Решение задач. Закрепление Производная в биологии и химии
Производная в биологии и химии Пирамида
Пирамида Некоторые приемы запоминания тригонометрических формул. 10 класс
Некоторые приемы запоминания тригонометрических формул. 10 класс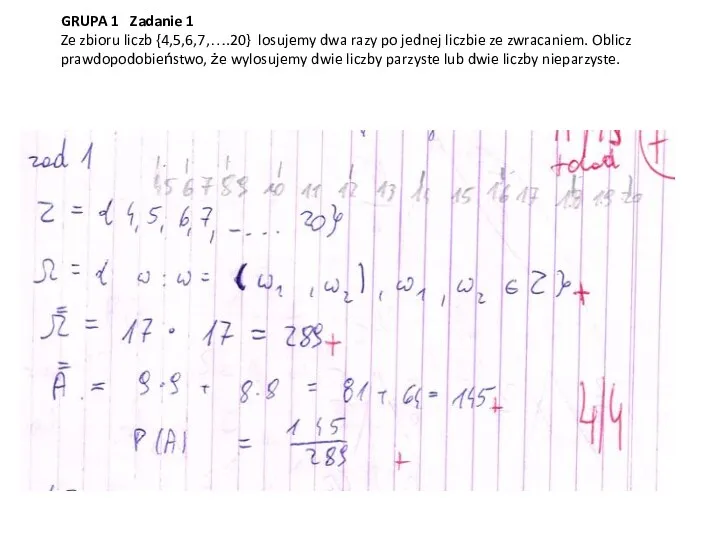 Omówienie sprawdzianu
Omówienie sprawdzianu Ал-джабр и ал-мукабала, а также метод ложного положения
Ал-джабр и ал-мукабала, а также метод ложного положения Транспортные задачи. Построение исходного опорного плана перевозок
Транспортные задачи. Построение исходного опорного плана перевозок Презентация Урок математики в 4 классе
Презентация Урок математики в 4 классе Проект Удивительный мир числ
Проект Удивительный мир числ Внеурочное мероприятие по математике В гостях у Квадратика в специальном классе школы 8 вида
Внеурочное мероприятие по математике В гостях у Квадратика в специальном классе школы 8 вида Отношения и пропорции
Отношения и пропорции Простейшие вероятностные задачи
Простейшие вероятностные задачи Конусы вокруг нас
Конусы вокруг нас Сценарий открытого урока Обыкновенные дроби для 5 класса с презентацией и тестирующим модулем.
Сценарий открытого урока Обыкновенные дроби для 5 класса с презентацией и тестирующим модулем. Узоры и орнаменты на посуде. Проект по математике
Узоры и орнаменты на посуде. Проект по математике Интересные приёмы быстрого счёта
Интересные приёмы быстрого счёта Числа от 1 до 20
Числа от 1 до 20 Задачи на нахождение неизвестного по двум разностям 4 класс(практичекий материал)
Задачи на нахождение неизвестного по двум разностям 4 класс(практичекий материал) Геометрические фигуры (круг, треугольник, прямоугольник)
Геометрические фигуры (круг, треугольник, прямоугольник) Элементы теории Марковских процессов
Элементы теории Марковских процессов ФЭМП 1,2,3,4,5 - учимся считать
ФЭМП 1,2,3,4,5 - учимся считать Производная функций нескольких переменных. Часть 2
Производная функций нескольких переменных. Часть 2 Построение таблиц истинности
Построение таблиц истинности Координаты на прямой
Координаты на прямой Метр. Таблица единиц длины
Метр. Таблица единиц длины