- Задачи и методы оптимального планирования

Содержание
- 2. Учебные вопросы: Основные понятия Математическая постановка общей задачи линейного программирования (ОЗЛП) Транспортная задача Геометрический метод решения
- 3. Первый учебный вопрос: Основные понятия
- 4. 1. Основные понятия 1.1 Сущность задач оптимального планирования Оптимальное планирование – комплекс методов который позволяет выбрать
- 5. 1.1 Сущность задач оптимального планирования Основные задачи: Правильно и чётко формулировать цели экономической системы в целом
- 6. 1.2 Классификация задач оптимального планирования I. По характеру взаимосвязи между переменными: линейные; нелинейные. II. По характеру
- 7. 1.2 Классификация задач оптимального планирования (продолжение) IV. По наличию информации: полные определённости; неполные информации. V. По
- 8. 1.3 Методы математического проектирования Дифференциальный; Линейный; Нелинейный; Динамический; Стохастический (вероятностный); Эвристический (интуиция, мнение экспертов) и т.д.
- 9. 1.4 Проблемы решаемые методами линейного программирования Оптимальное распределение мощностей различных машин, станков, механизмов; Оптимальное использование транспортных
- 10. Второй учебный вопрос: Математическая постановка общей задачи линейного программирования (ОЗЛП)
- 11. 2.1 Общие математические признаки общей задачи линейного программирования (ОЗЛП) Отыскание экстремума (min; max); Наличие большого числа
- 12. 2.2 Постановка общей задачи Найти значение переменных Х1, Х2, …, Хn, которые обращают в max или
- 13. 2.3 Формы записи задачи линейного программирования Стандартная; Каноническая; Векторная; Матричная.
- 14. Третий учебный вопрос: Транспортная задача
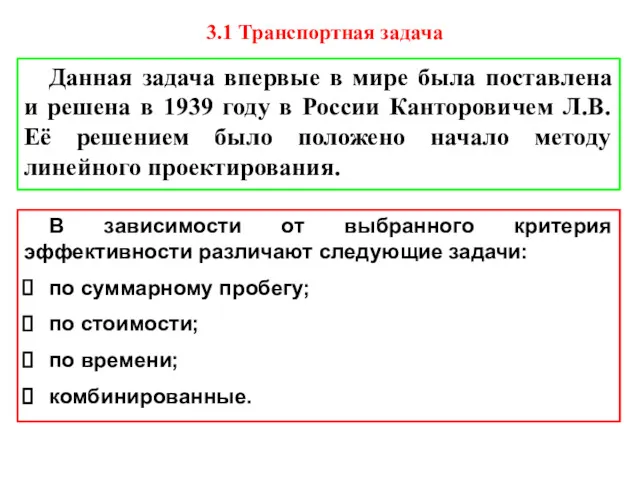
- 15. 3.1 Транспортная задача В зависимости от выбранного критерия эффективности различают следующие задачи: по суммарному пробегу; по
- 16. 3.1 Транспортная задача линейного проектирования (ТЗЛП) в общем виде Исходные данные: Скi - склады с запасом
- 17. 3.1.1 Составляем логическую таблицу
- 18. 3.1.2 На основе таблицы составляем целевую функцию Целевая функция Ограничения по запасам на складах Ограничения по
- 19. Четвёртый учебный вопрос: Геометрический метод решения ОЗЛП
- 20. 4.1 Основа метода Задачам линейного программирования можно дать наглядную геометрическую интерпретацию, которая позволяет наглядно увидеть ряд
- 21. Целевая функция Ограничения * Плоскость делится прямой на 2 полуплоскости: Геометрическая интерпретация ЗЛП
- 22. Построить на координатной плоскости область соответствующую ограничениям, которые представлены прямыми линиями. Определить положительную или отрицательную полуплоскость
- 23. 5. Определить направление возрастания или убывания целевой функции в зависимости от её вида (min; max) с
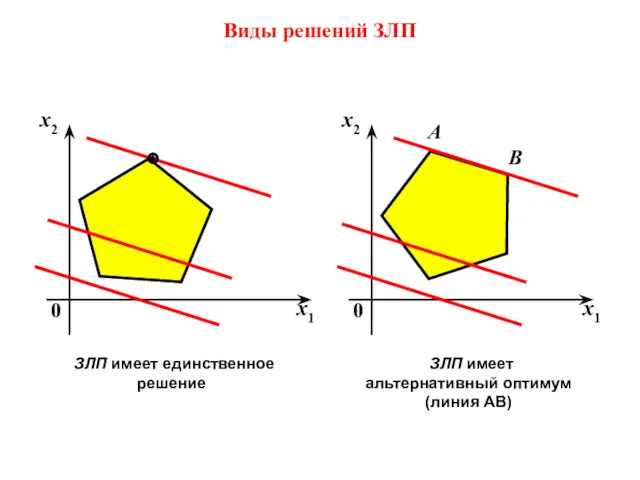
- 24. ЗЛП имеет единственное решение Виды решений ЗЛП ЗЛП имеет альтернативный оптимум (линия АВ)
- 25. ЗЛП имеет минимум и не имеет максимума Виды решений ЗЛП ЗЛП не имеет решения
- 26. Пятый учебный вопрос: Пример решения ЗЛП
- 27. Целевая функция F = 2х1 + х2 → max Ограничения Решить задачу геометрическим методом Решение задачи
- 28. I Этап: II Этап: Определить направление векторов. III Этап: Выделить ОДР и её вершины – ОАВСД
- 29. V Этап: Определить направление вектора. VI Этап: Перебираем все точки для F = 2х1 + х2
- 30. Решение задачи C (3;2)
- 31. P.S. Если взять целевую функцию F = х1 + 2х2 → max при тех же ограничениях,
- 32. Шестой учебный вопрос: Двойственные задачи линейного программирования
- 33. Двойственность в линейном программировании это принцип, который заключается в том, чтобы для каждой задачи ЛП путём
- 34. 6.1 Основные понятия (продолжение)
- 35. В экономической литературе цены ресурсов y1, y2, …, ym носят следующие названия – учётные, неявные, теневые.
- 36. Алгоритм составления двойственной задачи I. Привести все неравенства системы ограничений прямой задачи к одному смыслу: Если
- 37. II. Составить расширенную матрицу коэффициентов прямой задачи Алгоритм составления двойственной задачи (продолжение)
- 38. III. Составить расширенную матрицу двойственной задачи, транспонированную (замена строк столбцами с сохранением порядка) к прямой Алгоритм
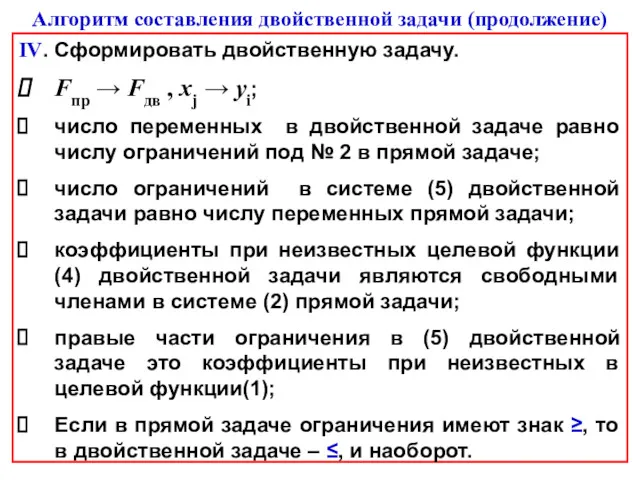
- 39. IV. Сформировать двойственную задачу. Fпр → Fдв , хj → yi; число переменных в двойственной задаче
- 40. Составить задачу двойственную следующей Целевая функция F = - х1 + х2 → max Ограничения Пример
- 41. I. Приведём все неравенства системы ограничений к виду ≤, так как ЦФ → max. С этой
- 42. II. Составим расширенную матрицу коэффициентов прямой задачи Пример. Решение (продолжение)
- 43. III. Составим расширенную матрицу двойственной задачи транспонированную к прямой Пример. Решение (продолжение)
- 44. IV. Сформируем двойственную задачу Целевая функция FДВ = ̶ у1 + 24 у2 + 3у3 ̶
- 46. Скачать презентацию
Учебные вопросы:
Основные понятия
Математическая постановка общей задачи линейного программирования (ОЗЛП)
Транспортная задача
Геометрический метод
Учебные вопросы:
Основные понятия
Математическая постановка общей задачи линейного программирования (ОЗЛП)
Транспортная задача
Геометрический метод
Первый учебный вопрос:
Основные понятия
Первый учебный вопрос:
Основные понятия
1. Основные понятия
1.1 Сущность задач оптимального планирования
Оптимальное планирование – комплекс методов
1. Основные понятия
1.1 Сущность задач оптимального планирования
Оптимальное планирование – комплекс методов
1.1 Сущность задач оптимального планирования
Основные задачи:
Правильно и чётко формулировать цели экономической
1.1 Сущность задач оптимального планирования
Основные задачи:
Правильно и чётко формулировать цели экономической
1.2 Классификация задач оптимального планирования
I. По характеру взаимосвязи между переменными:
линейные;
нелинейные.
II.
1.2 Классификация задач оптимального планирования
I. По характеру взаимосвязи между переменными:
линейные;
нелинейные.
II.
1.2 Классификация задач оптимального планирования (продолжение)
IV. По наличию информации:
полные определённости;
неполные информации.
V.
1.2 Классификация задач оптимального планирования (продолжение)
IV. По наличию информации:
полные определённости;
неполные информации.
V.
1.3 Методы математического проектирования
Дифференциальный;
Линейный;
Нелинейный;
Динамический;
Стохастический (вероятностный);
Эвристический (интуиция, мнение экспертов) и т.д.
1.3 Методы математического проектирования
Дифференциальный;
Линейный;
Нелинейный;
Динамический;
Стохастический (вероятностный);
Эвристический (интуиция, мнение экспертов) и т.д.
1.4 Проблемы решаемые методами линейного программирования
Оптимальное распределение мощностей различных машин, станков,
1.4 Проблемы решаемые методами линейного программирования
Оптимальное распределение мощностей различных машин, станков,
Второй учебный вопрос:
Математическая постановка общей задачи линейного программирования (ОЗЛП)
Второй учебный вопрос:
Математическая постановка общей задачи линейного программирования (ОЗЛП)
2.1 Общие математические признаки общей задачи линейного программирования (ОЗЛП)
Отыскание экстремума (min;
2.1 Общие математические признаки общей задачи линейного программирования (ОЗЛП)
Отыскание экстремума (min;
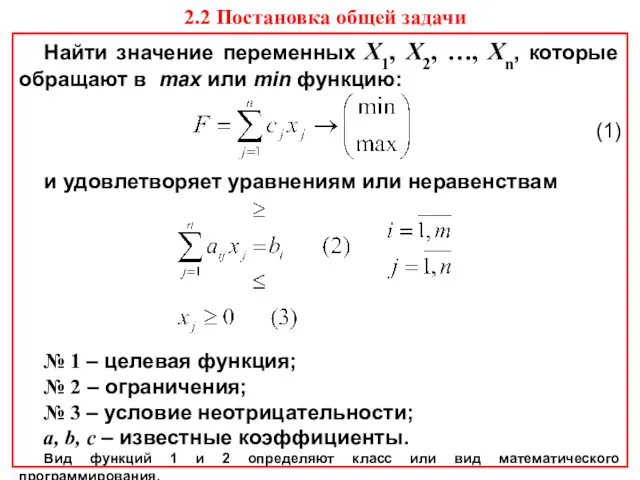
2.2 Постановка общей задачи
Найти значение переменных Х1, Х2, …, Хn, которые
2.2 Постановка общей задачи
Найти значение переменных Х1, Х2, …, Хn, которые
2.3 Формы записи задачи линейного программирования
Стандартная;
Каноническая;
Векторная;
Матричная.
2.3 Формы записи задачи линейного программирования
Стандартная;
Каноническая;
Векторная;
Матричная.
Третий учебный вопрос:
Транспортная задача
Третий учебный вопрос:
Транспортная задача
3.1 Транспортная задача
В зависимости от выбранного критерия эффективности различают следующие задачи:
по
3.1 Транспортная задача
В зависимости от выбранного критерия эффективности различают следующие задачи:
по
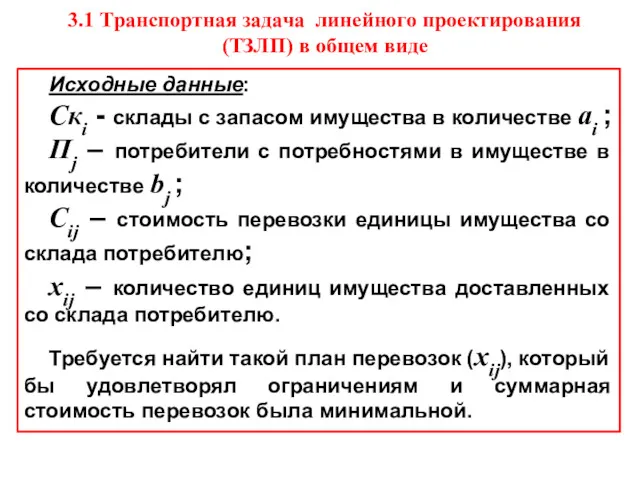
3.1 Транспортная задача линейного проектирования (ТЗЛП) в общем виде
Исходные данные:
Скi -
3.1 Транспортная задача линейного проектирования (ТЗЛП) в общем виде
Исходные данные:
Скi -
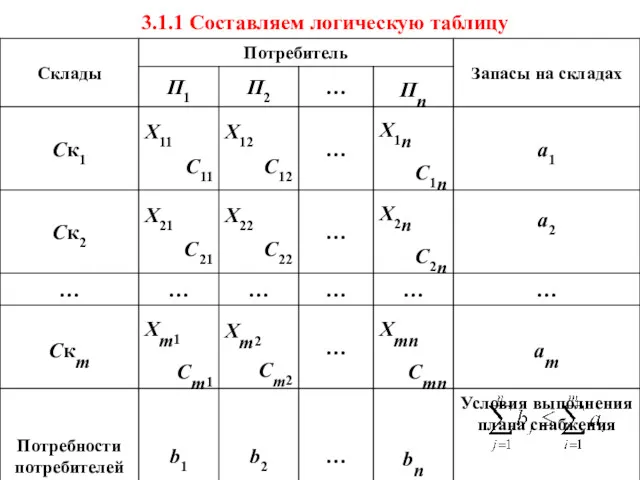
3.1.1 Составляем логическую таблицу
3.1.1 Составляем логическую таблицу
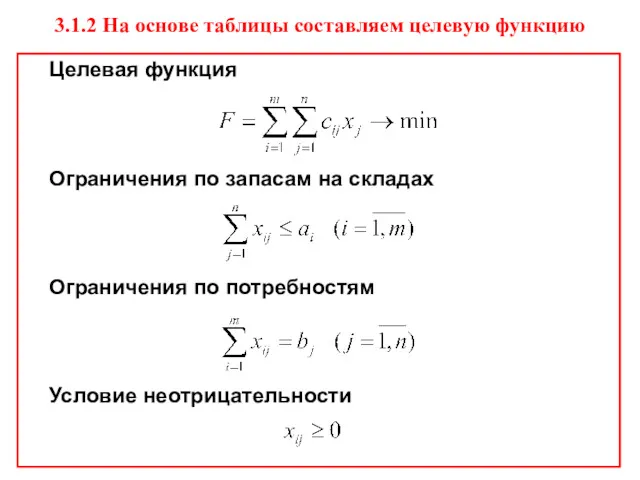
3.1.2 На основе таблицы составляем целевую функцию
Целевая функция
Ограничения по запасам на
3.1.2 На основе таблицы составляем целевую функцию
Целевая функция
Ограничения по запасам на
Четвёртый учебный вопрос:
Геометрический метод решения ОЗЛП
Четвёртый учебный вопрос:
Геометрический метод решения ОЗЛП
4.1 Основа метода
Задачам линейного программирования можно дать наглядную геометрическую интерпретацию, которая
4.1 Основа метода
Задачам линейного программирования можно дать наглядную геометрическую интерпретацию, которая

Целевая функция
Ограничения
* Плоскость делится прямой на 2 полуплоскости:
Геометрическая интерпретация ЗЛП
Целевая функция
Ограничения
* Плоскость делится прямой на 2 полуплоскости:
Геометрическая интерпретация ЗЛП
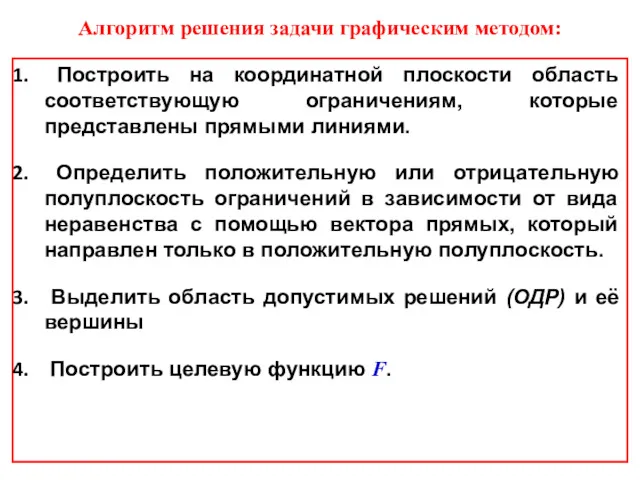
Построить на координатной плоскости область соответствующую ограничениям, которые представлены прямыми
Построить на координатной плоскости область соответствующую ограничениям, которые представлены прямыми
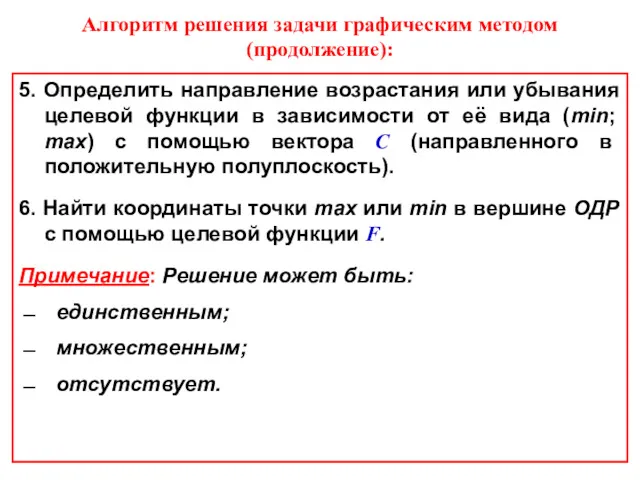
5. Определить направление возрастания или убывания целевой функции в зависимости от
5. Определить направление возрастания или убывания целевой функции в зависимости от
ЗЛП имеет единственное решение
Виды решений ЗЛП
ЗЛП имеет альтернативный оптимум (линия АВ)
ЗЛП имеет единственное решение
Виды решений ЗЛП
ЗЛП имеет альтернативный оптимум (линия АВ)
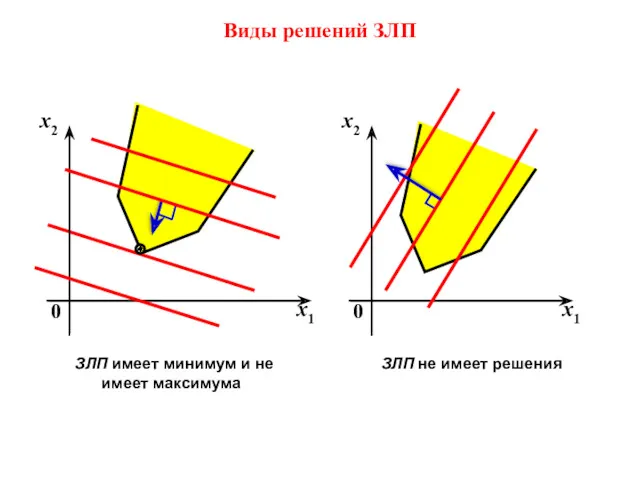
ЗЛП имеет минимум и не имеет максимума
Виды решений ЗЛП
ЗЛП не имеет
ЗЛП имеет минимум и не имеет максимума
Виды решений ЗЛП
ЗЛП не имеет
Пятый учебный вопрос:
Пример решения ЗЛП
Пятый учебный вопрос:
Пример решения ЗЛП
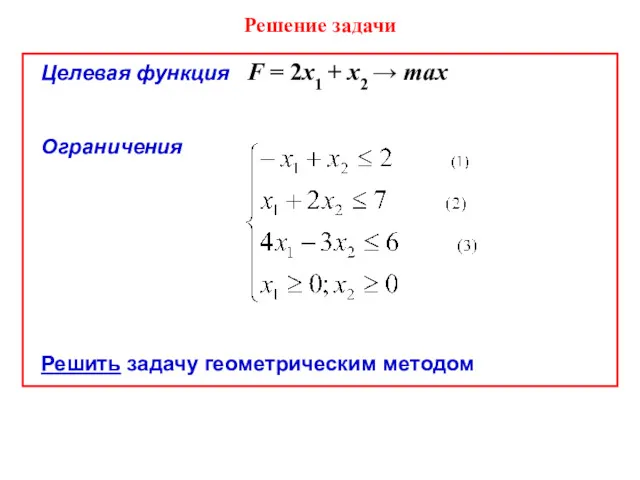
Целевая функция F = 2х1 + х2 → max
Ограничения
Решить задачу геометрическим
Целевая функция F = 2х1 + х2 → max
Ограничения
Решить задачу геометрическим
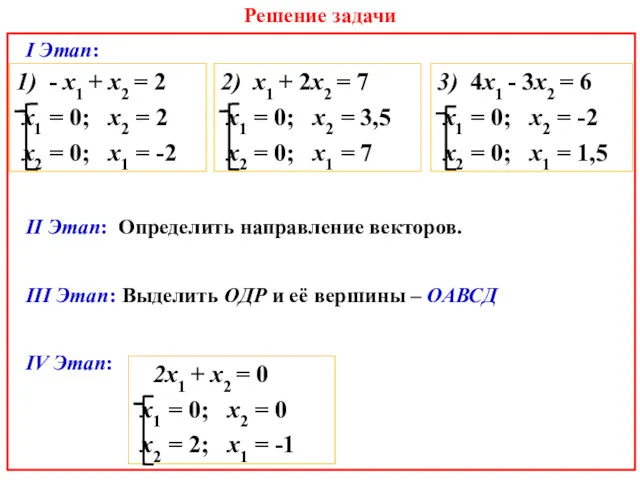
I Этап:
II Этап: Определить направление векторов.
III Этап: Выделить ОДР и её
I Этап:
II Этап: Определить направление векторов.
III Этап: Выделить ОДР и её
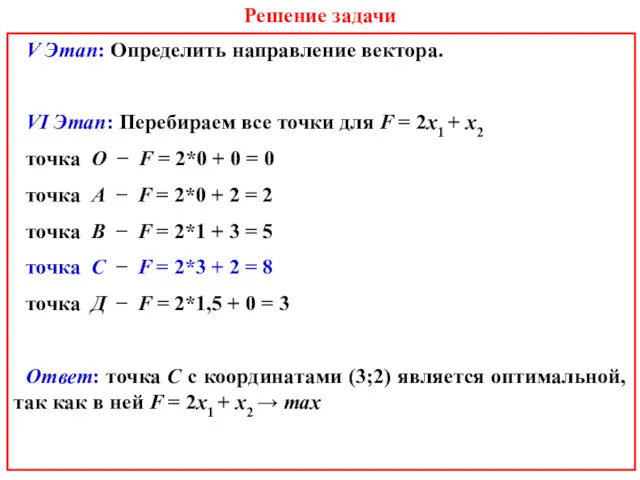
V Этап: Определить направление вектора.
VI Этап: Перебираем все точки для F
V Этап: Определить направление вектора.
VI Этап: Перебираем все точки для F
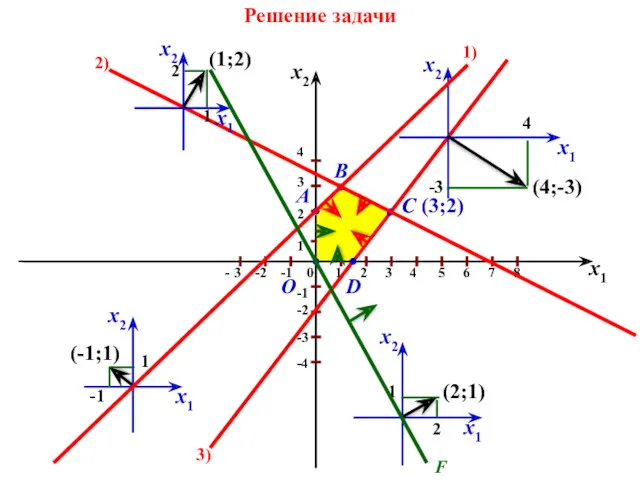
Решение задачи
C (3;2)
Решение задачи
C (3;2)
P.S. Если взять целевую функцию F = х1 + 2х2 →
P.S. Если взять целевую функцию F = х1 + 2х2 →
Шестой учебный вопрос:
Двойственные задачи линейного программирования
Шестой учебный вопрос:
Двойственные задачи линейного программирования
Двойственность в линейном программировании это принцип, который заключается в том, чтобы
Двойственность в линейном программировании это принцип, который заключается в том, чтобы
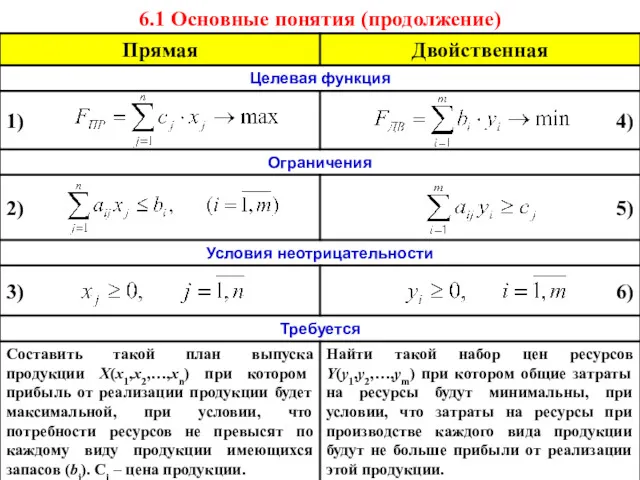
6.1 Основные понятия (продолжение)
6.1 Основные понятия (продолжение)
В экономической литературе цены ресурсов y1, y2, …, ym носят следующие
В экономической литературе цены ресурсов y1, y2, …, ym носят следующие
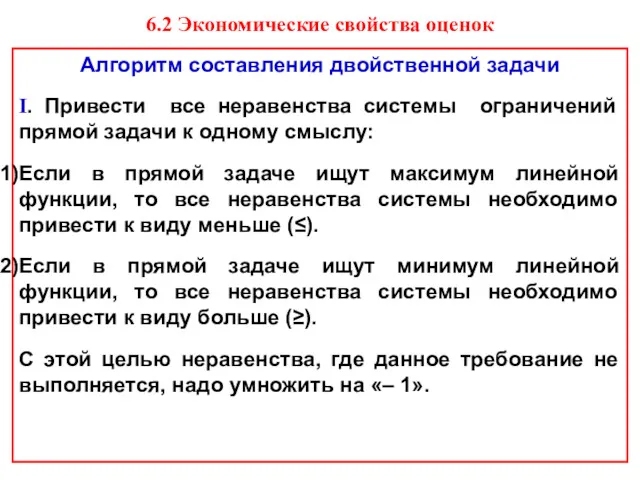
Алгоритм составления двойственной задачи
I. Привести все неравенства системы ограничений прямой задачи
Алгоритм составления двойственной задачи
I. Привести все неравенства системы ограничений прямой задачи
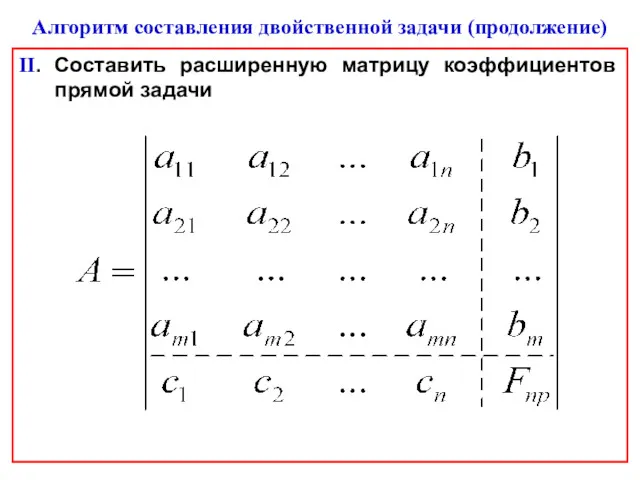
II. Составить расширенную матрицу коэффициентов прямой задачи
Алгоритм составления двойственной задачи (продолжение)
II. Составить расширенную матрицу коэффициентов прямой задачи
Алгоритм составления двойственной задачи (продолжение)
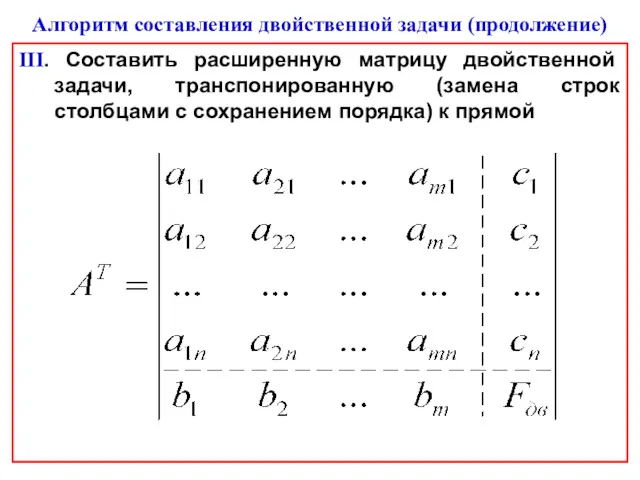
III. Составить расширенную матрицу двойственной задачи, транспонированную (замена строк столбцами с
III. Составить расширенную матрицу двойственной задачи, транспонированную (замена строк столбцами с
IV. Сформировать двойственную задачу.
Fпр → Fдв , хj → yi;
число переменных
IV. Сформировать двойственную задачу.
Fпр → Fдв , хj → yi;
число переменных
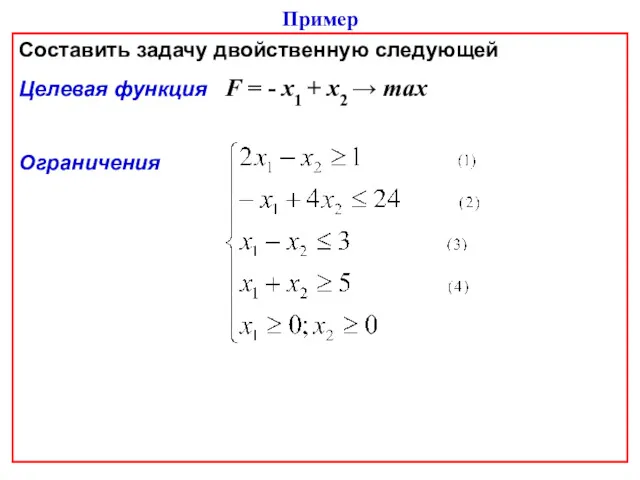
Составить задачу двойственную следующей
Целевая функция F = - х1 + х2
Составить задачу двойственную следующей
Целевая функция F = - х1 + х2
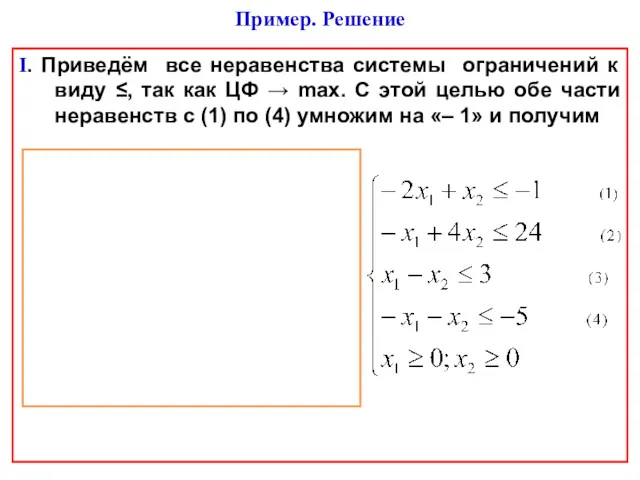
I. Приведём все неравенства системы ограничений к виду ≤, так как
I. Приведём все неравенства системы ограничений к виду ≤, так как
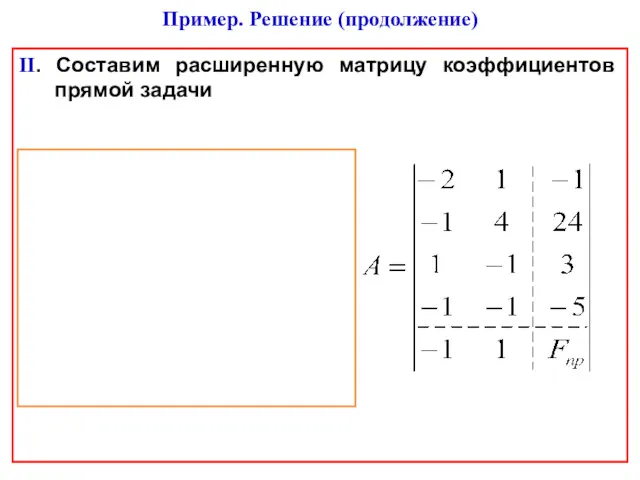
II. Составим расширенную матрицу коэффициентов прямой задачи
Пример. Решение (продолжение)
II. Составим расширенную матрицу коэффициентов прямой задачи
Пример. Решение (продолжение)
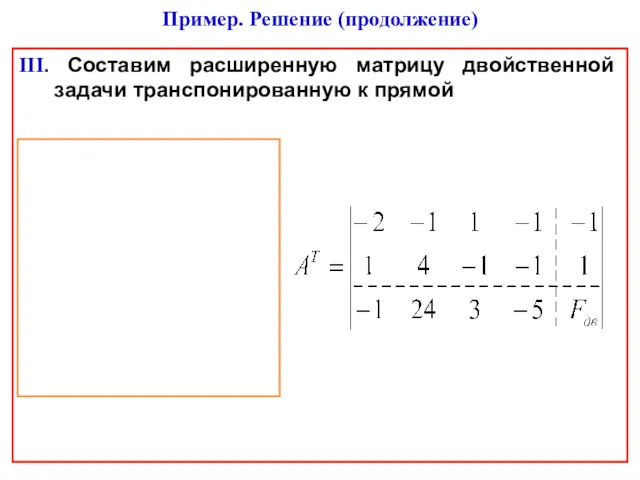
III. Составим расширенную матрицу двойственной задачи транспонированную к прямой
Пример. Решение (продолжение)
III. Составим расширенную матрицу двойственной задачи транспонированную к прямой
Пример. Решение (продолжение)
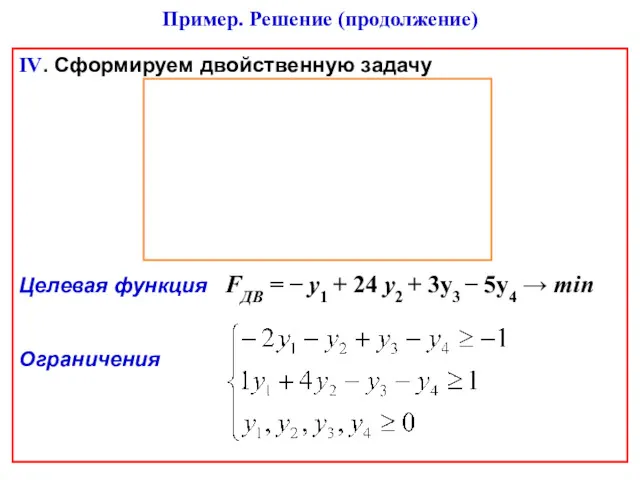
IV. Сформируем двойственную задачу
Целевая функция FДВ = ̶ у1 + 24
IV. Сформируем двойственную задачу
Целевая функция FДВ = ̶ у1 + 24
 Формула бинома Ньютона. Свойства биномиальных коэффициентов
Формула бинома Ньютона. Свойства биномиальных коэффициентов Устный счет. Сложение с переходом через десяток. Часть 2
Устный счет. Сложение с переходом через десяток. Часть 2 Математика в календаре
Математика в календаре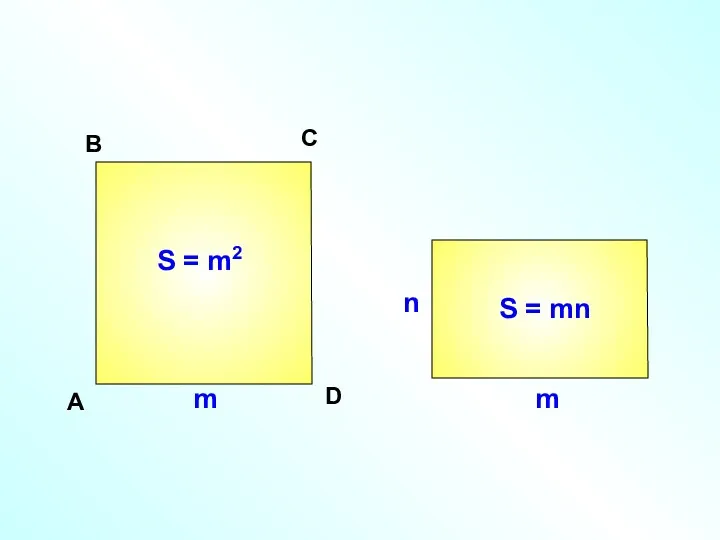 Площади фигур
Площади фигур Предел функции
Предел функции Точность и качество измерений: понятия погрешности, точности, достоверности, сходимости, правильности. Классы точности приборов
Точность и качество измерений: понятия погрешности, точности, достоверности, сходимости, правильности. Классы точности приборов Умножение круглых чисел
Умножение круглых чисел Цилиндр. Понятие цилиндрической поверхности
Цилиндр. Понятие цилиндрической поверхности Числовые промежутки
Числовые промежутки Анализ эмпирических данных. (Тема 9)
Анализ эмпирических данных. (Тема 9) Функция y=sinx и её график
Функция y=sinx и её график Проблема качества систем автоматического управления. Тема 4
Проблема качества систем автоматического управления. Тема 4 Презентация Больше, меньше 1 класс
Презентация Больше, меньше 1 класс Самостоятельная математическая деятельность детей дошкольного возраста
Самостоятельная математическая деятельность детей дошкольного возраста Первый признак равенства треугольников. (7 класс)
Первый признак равенства треугольников. (7 класс) Знаки тригонометрических функций
Знаки тригонометрических функций Урок математики в 1 классе ( Гармония).
Урок математики в 1 классе ( Гармония). Компоненты суммы
Компоненты суммы Письменное деление многозначных чисел на трехзначное число
Письменное деление многозначных чисел на трехзначное число Урок математики в 4 классе по теме: Прямоугольный параллелепипед. Куб.
Урок математики в 4 классе по теме: Прямоугольный параллелепипед. Куб. Интегральное исчисление функций одной переменной
Интегральное исчисление функций одной переменной Конспект занятия Путешествие по стране логики
Конспект занятия Путешествие по стране логики Перпендикуляр и наклонные Перпендикуляр из точки А к плоскости a
Перпендикуляр и наклонные Перпендикуляр из точки А к плоскости a Математическая игра Звёздный час
Математическая игра Звёздный час Множення десяткових дробів
Множення десяткових дробів Усечённая пирамида
Усечённая пирамида Решение квадратных уравнений. Формулы корней квадратных уравнений. 8 класс
Решение квадратных уравнений. Формулы корней квадратных уравнений. 8 класс Умножение десятичных дробей на натуральные числа
Умножение десятичных дробей на натуральные числа