- Проблема качества систем автоматического управления. Тема 4

Содержание
- 2. Основные критерии качества Критерии точности. Определяют условия, которым должна удовлетворять ошибка системы при некоторых типовых внешних
- 3. Показатели точности Основные подходы к оценке точности Детерминистский – внешние воздействия представляют собой известные функции от
- 4. e(t)=g(t)–y(t)=eп (t)+eв (t) g f g f еуст=eв (t)+eчэ (t) = eв (t)+eв (t)+eчэ (t) =
- 5. Теорема о конечном значении преобразования Лапласа Определение установившейся ошибки в первых трех режимах 1. Оценка точности
- 6. g Поскольку В1(0)=1 и С1(0)=±1, то ест полностью зависит от r !!! При r = 0
- 7. Установившаяся (статическая) ошибка по возмущающему воздействию
- 8. 2. Оценка точности в режиме движения с постоянной скоростью Установившаяся ошибка по задающему воздействию называется скоростной.
- 9. 3. Оценка точности в режиме движения с постоянным ускорением Установившаяся ошибка по задающему воздействию называется ошибкой
- 10. 4. Оценка точности в режиме движения по гармоническому закону Показатель точности – амплитуда ошибки em Полная
- 11. Пример. ЭМДСС. Есть ли в системе интегрирующее звено?
- 13. Пример. Передаточные функции РС: Порядок астатизма системы: r = r1+1.
- 14. Оценка качества переходных процессов Ошибка САУ: e(t)=eп (t)+eв (t). Рассматривается eп (t)! Показатели качества переходных процессов
- 15. Оценка качества переходных процессов по переходной характеристике ЗС Переходная характеристика? Как по ней оценить точность системы?
- 16. Оценка качества переходных процессов по частотным характеристикам РС 1. Частотные характеристики строить проще, чем переходную характеристику.
- 17. Точки 2 и 4 – ЗУ по амплитуде Точки 3 и 5 – ЗУ по фазе:
- 18. Определение запасов устойчивости ЗС по фазе и по амплитуде по ЛЧХ РС ЗУ по амплитуде: ЗУ
- 19. Показатель колебательности ЗС Если на резонансной частоте |Ф(jωр)|→∞, т.е. W(jωр|→ –1, то САУ на КГУ. Mmax
- 20. На плоскости АФХ показатель колебательности М определяет запретную область (круг), внутрь которой не должна заходить АФХ.
- 21. Определение показателя колебательности ЗС по ЛЧХ РС Отображение окружности при М=const с плоскости АФХ на плоскость
- 22. Для того, чтобы показатель колебательности был не больше заданного ЛФХ не должна заходить в запретную область.
- 23. Приближенное соотношение значений перерегулирования σ % и показателя колебательности замкнутой системы М
- 24. Оценивание быстродействия по частотным характеристикам РС Показатель быстродействия – длительность переходного процесса tп. Точной количественной оценки
- 26. Скачать презентацию
Основные критерии качества
Критерии точности. Определяют условия, которым должна удовлетворять
Основные критерии качества
Критерии точности. Определяют условия, которым должна удовлетворять
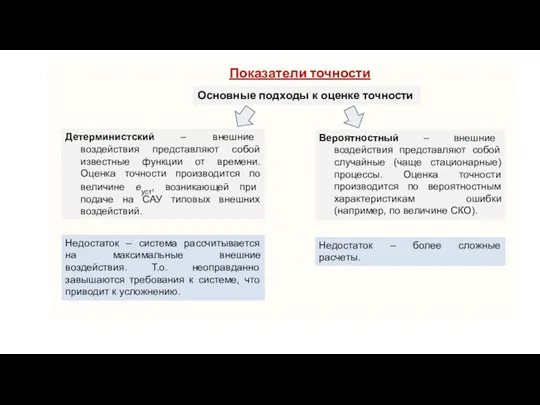
Показатели точности
Основные подходы к оценке точности
Детерминистский – внешние воздействия представляют
Показатели точности
Основные подходы к оценке точности
Детерминистский – внешние воздействия представляют
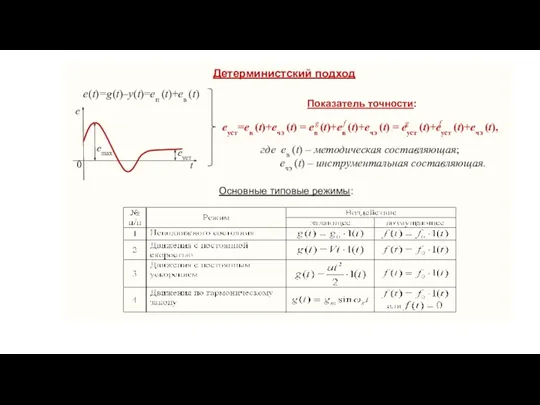
e(t)=g(t)–y(t)=eп (t)+eв (t)
g f g f
еуст=eв (t)+eчэ (t) = eв
e(t)=g(t)–y(t)=eп (t)+eв (t)
g f g f
еуст=eв (t)+eчэ (t) = eв
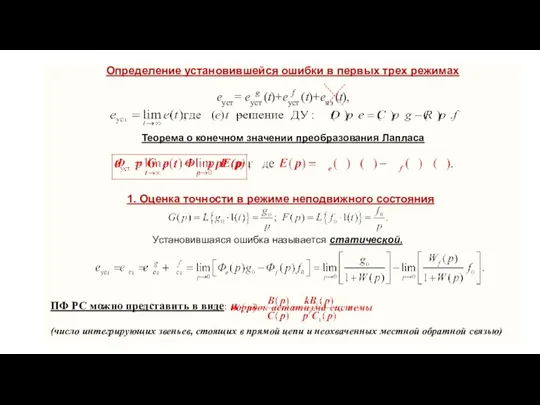
Теорема о конечном значении преобразования Лапласа
Определение установившейся ошибки в первых трех
Теорема о конечном значении преобразования Лапласа
Определение установившейся ошибки в первых трех

g
Поскольку В1(0)=1 и С1(0)=±1, то ест полностью зависит от r
g
Поскольку В1(0)=1 и С1(0)=±1, то ест полностью зависит от r

Установившаяся (статическая) ошибка по возмущающему воздействию
Установившаяся (статическая) ошибка по возмущающему воздействию
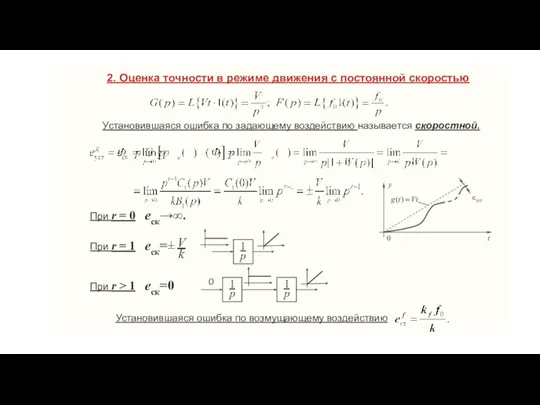
2. Оценка точности в режиме движения с постоянной скоростью
Установившаяся ошибка по
2. Оценка точности в режиме движения с постоянной скоростью
Установившаяся ошибка по
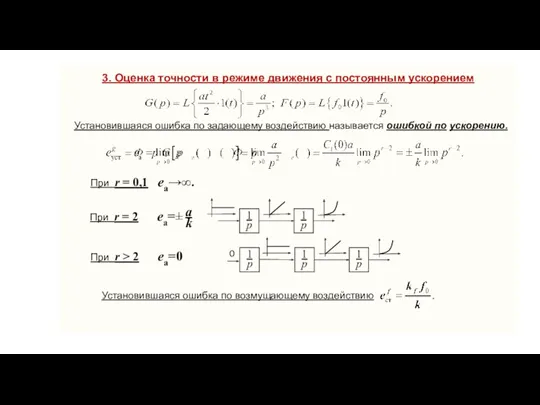
3. Оценка точности в режиме движения с постоянным ускорением
Установившаяся ошибка по
3. Оценка точности в режиме движения с постоянным ускорением
Установившаяся ошибка по
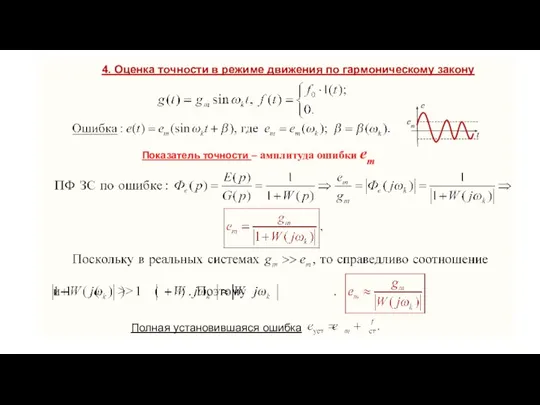
4. Оценка точности в режиме движения по гармоническому закону
Показатель точности –
4. Оценка точности в режиме движения по гармоническому закону
Показатель точности –
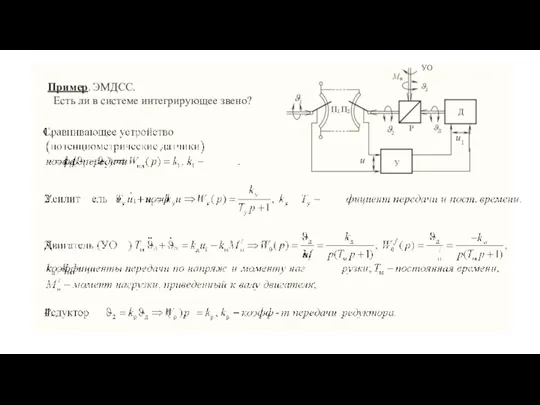
Пример. ЭМДСС.
Есть ли в системе интегрирующее звено?
Пример. ЭМДСС.
Есть ли в системе интегрирующее звено?

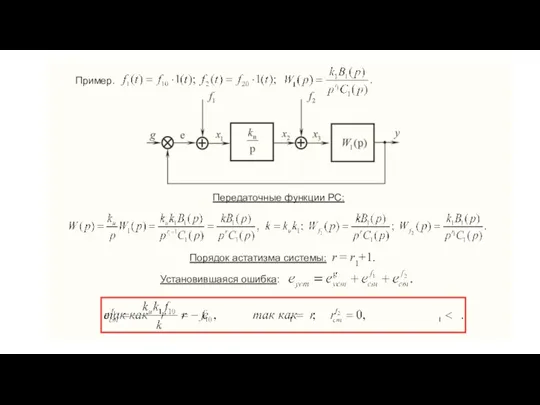
Пример.
Передаточные функции РС:
Порядок астатизма системы: r = r1+1.
Пример.
Передаточные функции РС:
Порядок астатизма системы: r = r1+1.
Оценка качества переходных процессов
Ошибка САУ: e(t)=eп (t)+eв (t).
Рассматривается eп
Оценка качества переходных процессов
Ошибка САУ: e(t)=eп (t)+eв (t).
Рассматривается eп
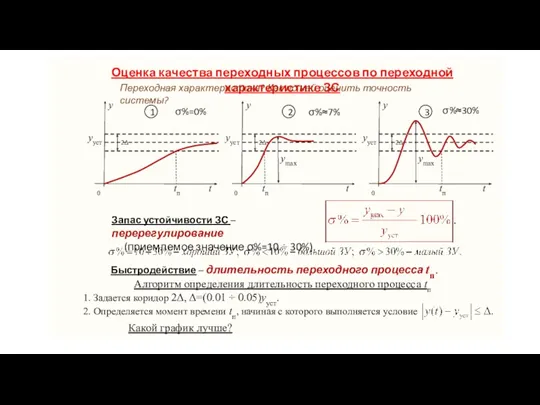
Оценка качества переходных процессов по переходной характеристике ЗС
Переходная характеристика? Как по
Оценка качества переходных процессов по переходной характеристике ЗС
Переходная характеристика? Как по
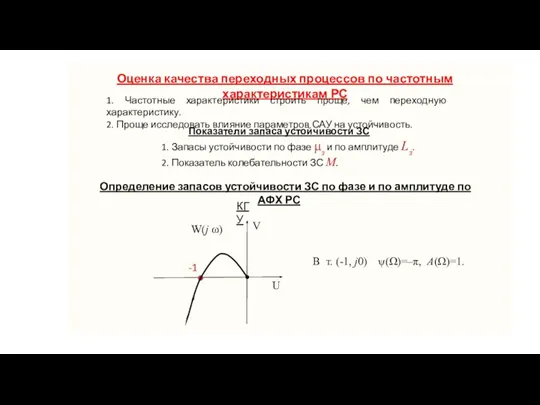
Оценка качества переходных процессов по частотным характеристикам РС
1. Частотные характеристики строить
Оценка качества переходных процессов по частотным характеристикам РС
1. Частотные характеристики строить
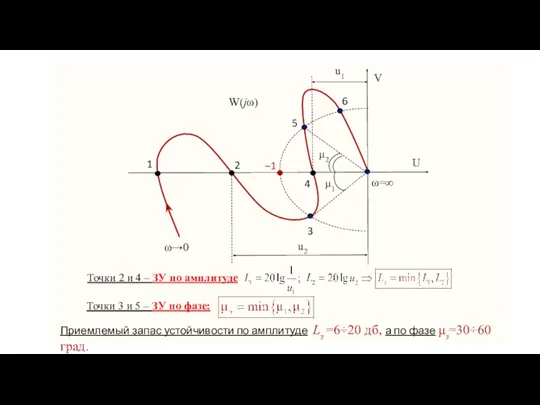
Точки 2 и 4 – ЗУ по амплитуде
Точки 3 и 5
Точки 2 и 4 – ЗУ по амплитуде
Точки 3 и 5
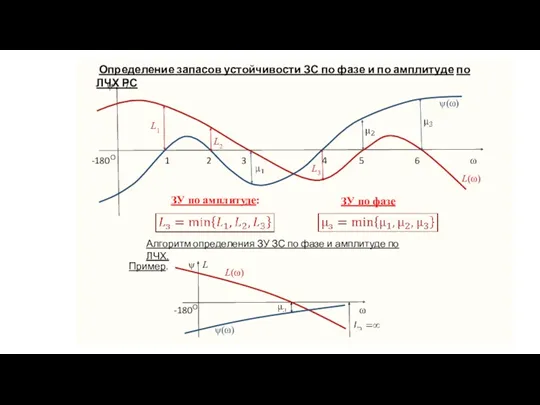
Определение запасов устойчивости ЗС по фазе и по амплитуде по
Определение запасов устойчивости ЗС по фазе и по амплитуде по
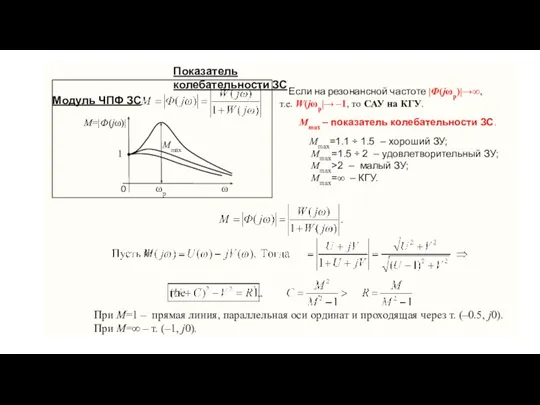
Показатель колебательности ЗС
Если на резонансной частоте |Ф(jωр)|→∞,
т.е. W(jωр|→ –1,
Показатель колебательности ЗС
Если на резонансной частоте |Ф(jωр)|→∞,
т.е. W(jωр|→ –1,
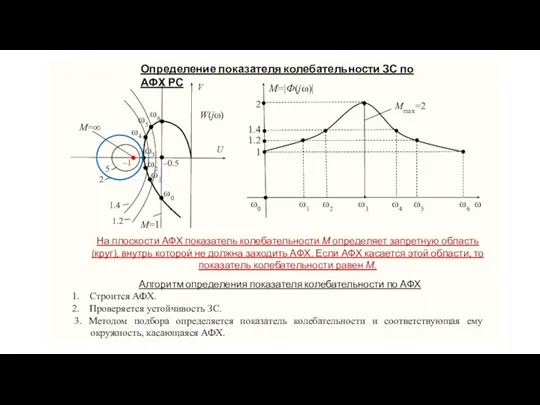
На плоскости АФХ показатель колебательности М определяет запретную область (круг), внутрь
На плоскости АФХ показатель колебательности М определяет запретную область (круг), внутрь
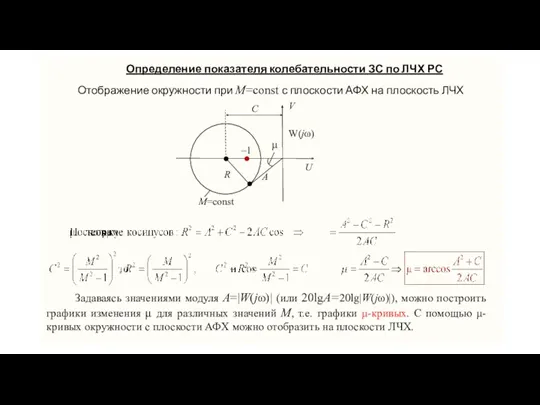
Определение показателя колебательности ЗС по ЛЧХ РС
Отображение окружности при М=const с
Определение показателя колебательности ЗС по ЛЧХ РС
Отображение окружности при М=const с

Для того, чтобы показатель колебательности был не больше заданного ЛФХ не
Для того, чтобы показатель колебательности был не больше заданного ЛФХ не
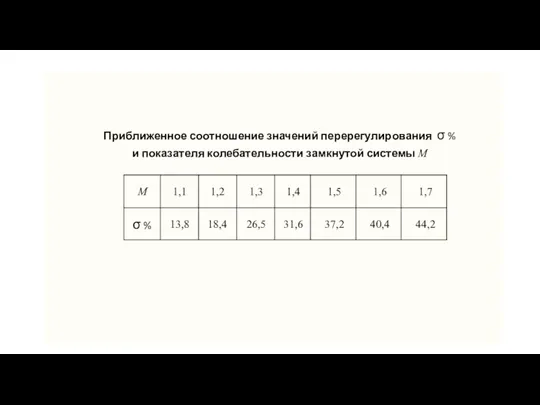
Приближенное соотношение значений перерегулирования σ %
и показателя колебательности замкнутой системы
Приближенное соотношение значений перерегулирования σ %
и показателя колебательности замкнутой системы
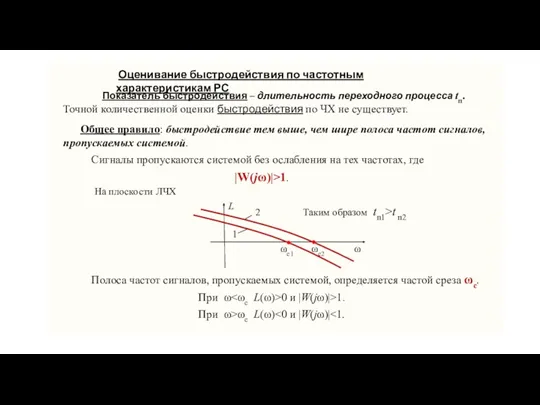
Оценивание быстродействия по частотным характеристикам РС
Показатель быстродействия – длительность
Оценивание быстродействия по частотным характеристикам РС
Показатель быстродействия – длительность
 Исследование функций. Чтение графика
Исследование функций. Чтение графика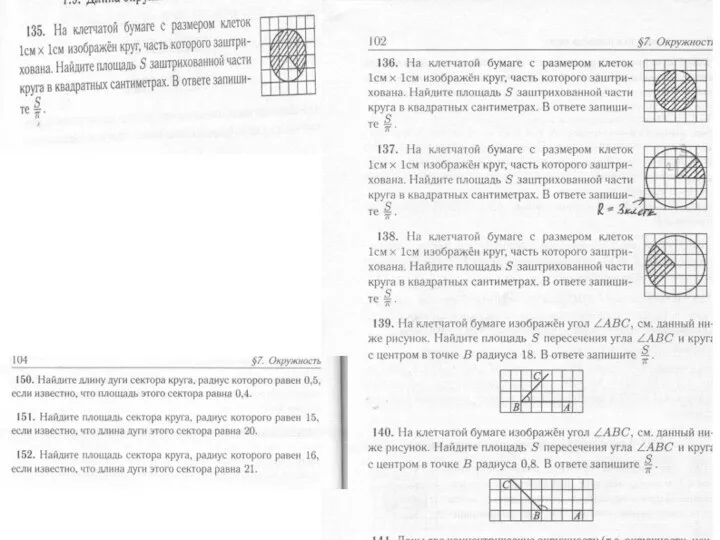 Окружность. Задачи
Окружность. Задачи Приемы быстрого счета
Приемы быстрого счета Игры с геометрическими фигурами
Игры с геометрическими фигурами Приближенные числа. Учет погрешностей результатов операций над приближенными числами
Приближенные числа. Учет погрешностей результатов операций над приближенными числами Параллельные плоскости. Признак параллельности плоскостей
Параллельные плоскости. Признак параллельности плоскостей Lecture 6 – Integrals
Lecture 6 – Integrals признаки делимости на 10, на 5, на 2
признаки делимости на 10, на 5, на 2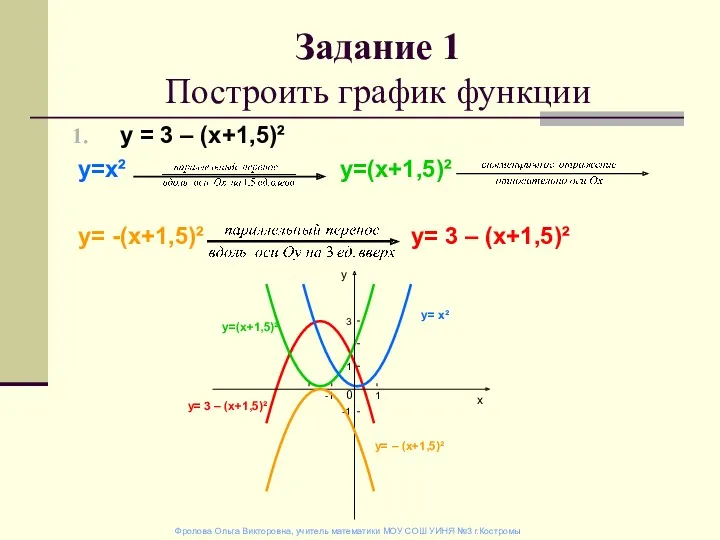 Построить график функции у = 3 – (х+1,5)²
Построить график функции у = 3 – (х+1,5)² Готовимся к ГИА, 9 класс. Тест 1, часть 2
Готовимся к ГИА, 9 класс. Тест 1, часть 2 Координаты на прямой. 6 класс
Координаты на прямой. 6 класс Урок-презентация по математике для 2 кл. Сложение и вычитание в пределах 9. Урок-повторение материала.
Урок-презентация по математике для 2 кл. Сложение и вычитание в пределах 9. Урок-повторение материала. Скалярний добуток векторів. Кут між двома векторами
Скалярний добуток векторів. Кут між двома векторами Путешествие в страну математики
Путешествие в страну математики Признаки делимости чисел на 2, 3, 9
Признаки делимости чисел на 2, 3, 9 The Normal and other Continuous Distributions
The Normal and other Continuous Distributions 1 сыйныфта телдән исәпләүгә 1-10 эчендә нумерациятемасына презентация.
1 сыйныфта телдән исәпләүгә 1-10 эчендә нумерациятемасына презентация. Треугольники. Основные признаки и свойства треугольников
Треугольники. Основные признаки и свойства треугольников Свойства сложения и умножения
Свойства сложения и умножения Урок математики Закрепление изученного по теме: числа от 1 до 20. Нумерация
Урок математики Закрепление изученного по теме: числа от 1 до 20. Нумерация Математика 3 класс.Урок закрепления по теме: Умножение многозначного числа на однозначное.
Математика 3 класс.Урок закрепления по теме: Умножение многозначного числа на однозначное. Табличное сложение и вычитание
Табличное сложение и вычитание Основы математики. Вопросы по категориям
Основы математики. Вопросы по категориям Решение задач по теме векторы
Решение задач по теме векторы Получение схемы логического элемента по итоговым значениям логической функции с использованием СДНФ ИЛИ СКНФ
Получение схемы логического элемента по итоговым значениям логической функции с использованием СДНФ ИЛИ СКНФ Движение протяженных тел
Движение протяженных тел Пирамида
Пирамида Сложение с помощью шкалы линейки: прибавление числа 5.
Сложение с помощью шкалы линейки: прибавление числа 5.