Контроль динамических систем АО на основе совместных процедур оптимальной фильтрации и сглаживания полетных данных презентация
- Контроль динамических систем АО на основе совместных процедур оптимальной фильтрации и сглаживания полетных данных

Содержание
- 2. Используя статистические свойства вектора невязок , можно построить процедуры контроля и диагностирования ОК по полетным данным.
- 3. При правильном функционировании ОК, соответствующем гауссовскому распределению невязок , квадратичная форма должна иметь распределение с n
- 4. 7.4 Диагностирование динамических систем АО на основе совместных процедур оптимальной фильтрации и сглаживания полетных данных
- 5. В многомерных динамических системах решение задачи диагностирования может быть сведено к определению того элемента вектора состояния
- 6. С учетом предварительного разложения ковариационной матрицы (7.15) квадратичную форму (7.12) можно представить в следующем виде: где
- 7. На основе декомпозиции (7.16) обобщенного параметра (7.12) и с учетом соотношения (7.14) может быть сформировано необходимое
- 8. Невыполнение условия (7.17) сигнализирует о наличии нарушений в ОК по к-му элементу вектора состояния. Для распознавания
- 9. где Статистика отражает техническое состояние ОК в i-й момент времени по к-му элементу ВС на заданном
- 10. если , то , где ; N – количество данных, используемых для вычисления дисперсии на скользящем
- 11. С учетом свойств статистики Фишера (6.27)и правила может быть сформировано необходимое условие работоспособного состояния (отсутствие отказов)
- 12. Обработка данных в “прямом” времени d j > 0 K i = P i/i-1 Η Τ
- 13. 7.5 Диагностирование одноканальной ИНС на основе совместных процедур оптимальной фильтрации и сглаживания
- 14. ωp a ∫ V R ∫ R + (-) Vp V ω δ R gδ +
- 15. Стохастическая математическая модель одноканальной ИНС Модель ошибок получена на основе детерминированной модели с учетом моделей инструментальных
- 16. для обобщенных параметров для обобщенных параметров Имитируется отказ акселерометра на 500-й секунде. Такой отказ косвенно проявляется
- 17. Акселерометр ах, м/с2 Гироскоп wх, o/ч Рисунок 7.2 Рисунок 7.3
- 18. Оценка параметров состояния, контроль и диагностика БИНС Акселерометр ах, m/s2 error estimation error (filtering) estimation error
- 19. При послеполетном диагностировании отказавший акселерометр локализуется при превышении допусков обобщенными параметрами (критерий ) и (критерий )
- 20. Методика выполнения КДЗ-3
- 21. Дано: оценка вектора состояния ОК, полученная соответственно в процессе фильтрации и сглаживания наблюдений, равны Выполнить: контроль
- 23. Скачать презентацию
 Двухфакторный дисперсионный анализ
Двухфакторный дисперсионный анализ Нумерация. Устный счёт
Нумерация. Устный счёт Решение тригонометрических уравнений с отбором корней на заданном промежутке
Решение тригонометрических уравнений с отбором корней на заданном промежутке Статистические методы анализа данных
Статистические методы анализа данных Приёмы письменного умножения в пределах 1000
Приёмы письменного умножения в пределах 1000 Векторы в пространстве
Векторы в пространстве Вписанные и описанные четырехугольники
Вписанные и описанные четырехугольники мультимедийная презентация занятия на аттестацию
мультимедийная презентация занятия на аттестацию Векторы. Векторная и скалярная величины
Векторы. Векторная и скалярная величины Диалоговое взаимодействие учащихся и учителя на уроке математики
Диалоговое взаимодействие учащихся и учителя на уроке математики Роль математики в житті людини
Роль математики в житті людини Универсальные средства измерений линейных размеров
Универсальные средства измерений линейных размеров Невизначений інтеграл
Невизначений інтеграл Построение графиков функции развилка
Построение графиков функции развилка Додавання двоцифрових чисел з переходом через розряд
Додавання двоцифрових чисел з переходом через розряд Поворот. (Геометрія. 9 клас)
Поворот. (Геометрія. 9 клас)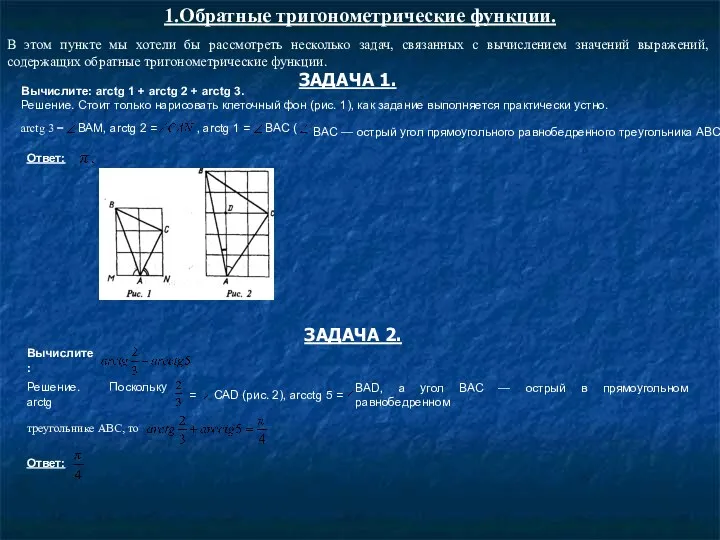 Обратные тригонометрические функции
Обратные тригонометрические функции Презентация к уроку математики в 1 классе по программе Планета знаний по теме: Числа 1,2,3
Презентация к уроку математики в 1 классе по программе Планета знаний по теме: Числа 1,2,3 Построение сечения в многограннике
Построение сечения в многограннике Позиционные задачи
Позиционные задачи Квадратичная функция и ее свойства
Квадратичная функция и ее свойства Симметрия в пространстве
Симметрия в пространстве Квадратные корни
Квадратные корни Решение рациональных уравнений. 9 класс
Решение рациональных уравнений. 9 класс Числа 16-20. Утворення, запис, читання чисел. Задачі на знаходження решти. Урок №72
Числа 16-20. Утворення, запис, читання чисел. Задачі на знаходження решти. Урок №72 Высокопроизводительные вычисления
Высокопроизводительные вычисления Комбинаторные задачи. Комбинаторика
Комбинаторные задачи. Комбинаторика Забавная математика
Забавная математика