- Математические модели управления

Содержание
- 2. Теория управления наука о принципах и методах управления различными системами, процессами и объектами. Суть теории управления
- 3. Первое самоуправляемое устройство Ктеси́бий, также Ктезибий (285-222 год до н. э.) — древнегреческий изобретатель, математик и
- 4. Корнелиус Дреббель Корнелиус Якобсон Дреббель (нидерл. Cornelius Jacobszoon Drebbel; 1572, Алкмар — 7 ноября 1633, Лондон)
- 5. Уатт, Джеймс Джеймс Уатт (англ. James Watt; 19 (30) января 1736 — 19 августа 1819) —
- 6. Ляпунов, Александр Михайлович Алекса́ндр Миха́йлович Ляпуно́в (25 мая (6 июня) 1857, Ярославль — 3 ноября 1918,
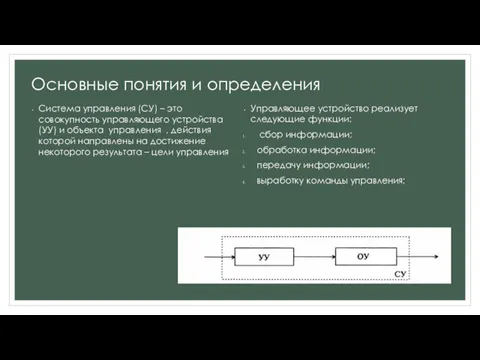
- 7. Основные понятия и определения Управляющее устройство реализует следующие функции: сбор информации; обработка информации; передачу информации; выработку
- 8. функциональная схема системы управления
- 9. Примеры схемы систем управления: углом тангажа самолета производством тара товара процессом обучения в
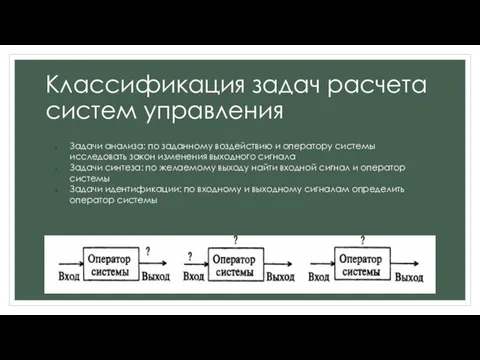
- 10. Классификация задач расчета систем управления Задачи анализа: по заданному воздействию и оператору системы исследовать закон изменения
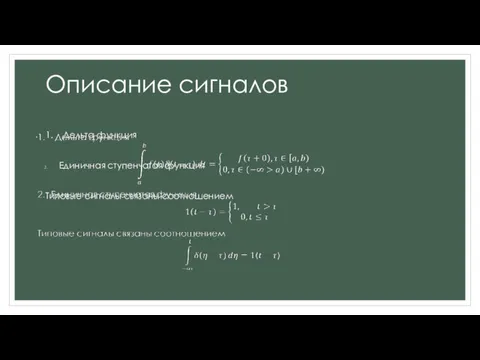
- 11. Описание сигналов 1. Дельта функция Единичная ступенчатая функция Типовые сигналы связаны соотношением
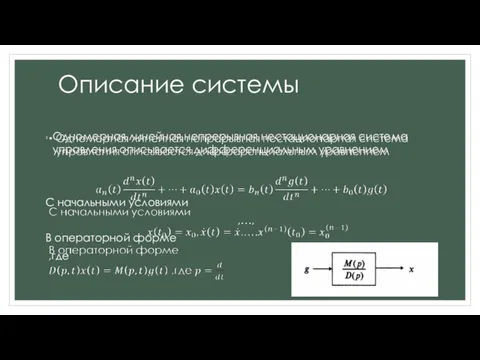
- 12. Описание системы Одномерная линейная непрерывная нестационарная система управления описывается дифференциальным уравнением С начальными условиями ,…, В
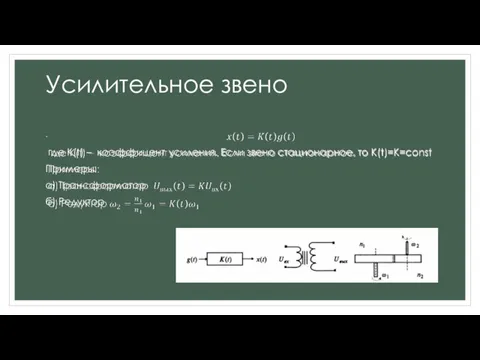
- 13. Усилительное звено где K(t) – коэффицент усиления. Если звено стационарное, то K(t)=K=const Примеры: а) Трансформатор б)
- 14. Дифференцирующее звено Операторная форма: Операторная форма: Интегрирующее звено
- 15. Пример 1 Построить структурную схему системы описываемой дифференциальным уравнением с нач. усл.
- 16. Пример 2 Построить структурную схему системы описываемой дифференциальным уравнением с нач. усл.
- 17. Передаточная функция Преобразование Лапласа основано на двух следующих формулах: прямого преобразования Лапласа обратного преобразования Лапласа p
- 18. Дифференциальные уравнения соединений А. Последовательное соединение Б. Параллельное соединение В. Соединение с обратной связью
- 19. Пример 3 Заданы входной и выходной сигналы: а) найти передаточную функцию W(p) всей системы; б) представить
- 20. Решение: а) Передаточная функция всей системы: б) Передаточная функция в виде Произведения элементарных динамических звеньев:
- 21. Пример 1. Упростив схему, представленную на рис. 2.8, определить какому элементарному динамическому звену соответствует передаточная функция
- 22. Решение:
- 24. Передаточную функцию двух звеньев, соединенных встречно-параллельно с отрицательной обратной связью можно представить в виде следующего выражения:
- 26. Скачать презентацию
Теория управления
наука о принципах и методах управления различными системами, процессами и
Теория управления
наука о принципах и методах управления различными системами, процессами и
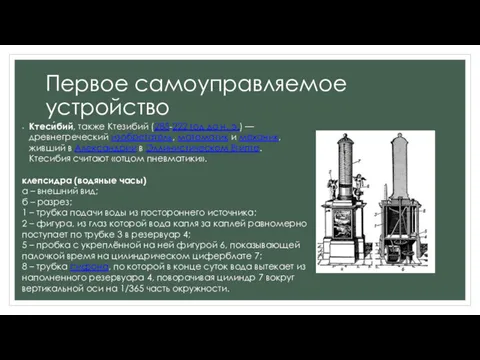
Первое самоуправляемое устройство
Ктеси́бий, также Ктезибий (285-222 год до н. э.) —
Первое самоуправляемое устройство
Ктеси́бий, также Ктезибий (285-222 год до н. э.) —
Корнелиус Дреббель
Корнелиус Якобсон Дреббель (нидерл. Cornelius Jacobszoon Drebbel; 1572, Алкмар — 7
Корнелиус Дреббель
Корнелиус Якобсон Дреббель (нидерл. Cornelius Jacobszoon Drebbel; 1572, Алкмар — 7
Уатт, Джеймс
Джеймс Уатт (англ. James Watt; 19 (30) января 1736 —
19 августа 1819) — шотландский инженер,
Уатт, Джеймс
Джеймс Уатт (англ. James Watt; 19 (30) января 1736 —
19 августа 1819) — шотландский инженер,
Ляпунов, Александр Михайлович
Алекса́ндр Миха́йлович Ляпуно́в (25 мая (6 июня) 1857, Ярославль — 3 ноября
Ляпунов, Александр Михайлович
Алекса́ндр Миха́йлович Ляпуно́в (25 мая (6 июня) 1857, Ярославль — 3 ноября
Основные понятия и определения
Управляющее устройство реализует следующие функции:
сбор информации;
обработка информации;
передачу
Основные понятия и определения
Управляющее устройство реализует следующие функции:
сбор информации;
обработка информации;
передачу
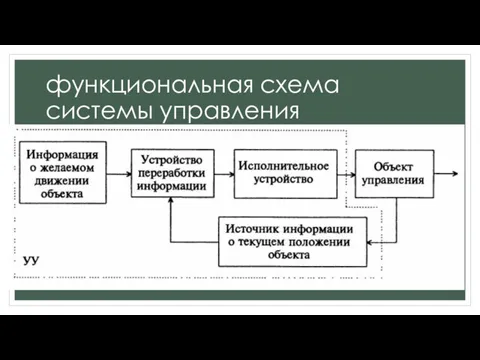
функциональная схема системы управления
функциональная схема системы управления
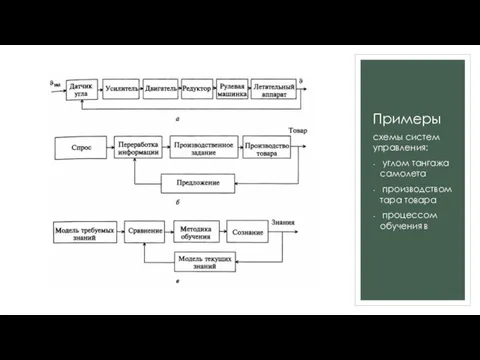
Примеры
схемы систем управления:
углом тангажа самолета
производством тара товара
процессом обучения
Примеры
схемы систем управления:
углом тангажа самолета
производством тара товара
процессом обучения
Классификация задач расчета систем управления
Задачи анализа: по заданному воздействию и оператору
Классификация задач расчета систем управления
Задачи анализа: по заданному воздействию и оператору
Описание сигналов
1. Дельта функция
Единичная ступенчатая функция
Типовые сигналы связаны соотношением
Описание сигналов
1. Дельта функция
Единичная ступенчатая функция
Типовые сигналы связаны соотношением
Описание системы
Одномерная линейная непрерывная нестационарная система управления описывается дифференциальным уравнением
С начальными
Описание системы
Одномерная линейная непрерывная нестационарная система управления описывается дифференциальным уравнением
С начальными
Усилительное звено
где K(t) – коэффицент усиления. Если звено
Усилительное звено
где K(t) – коэффицент усиления. Если звено
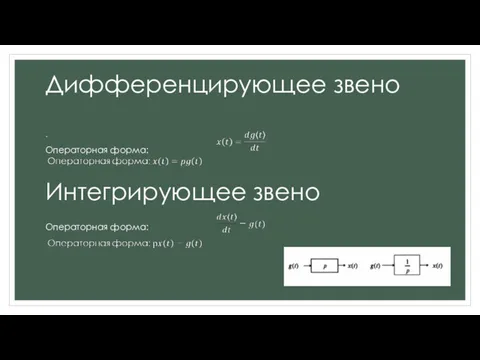
Дифференцирующее звено
Операторная форма:
Операторная форма:
Интегрирующее звено
Дифференцирующее звено
Операторная форма:
Операторная форма:
Интегрирующее звено
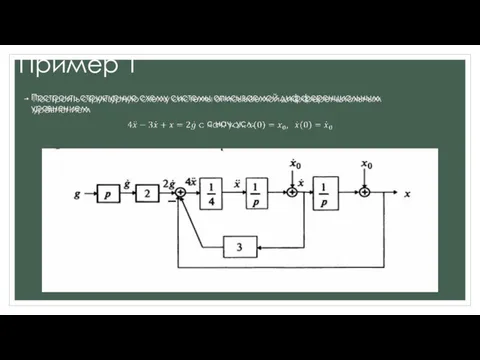
Пример 1
Построить структурную схему системы описываемой дифференциальным уравнением
с нач. усл.
Пример 1
Построить структурную схему системы описываемой дифференциальным уравнением
с нач. усл.
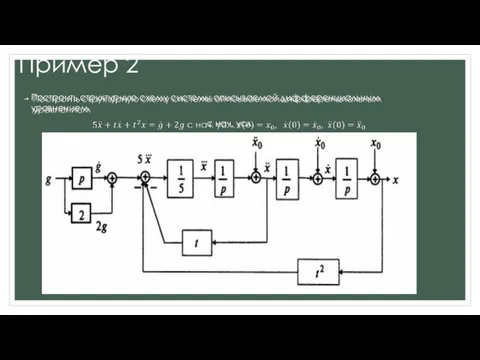
Пример 2
Построить структурную схему системы описываемой дифференциальным уравнением
с нач. усл.
Пример 2
Построить структурную схему системы описываемой дифференциальным уравнением
с нач. усл.
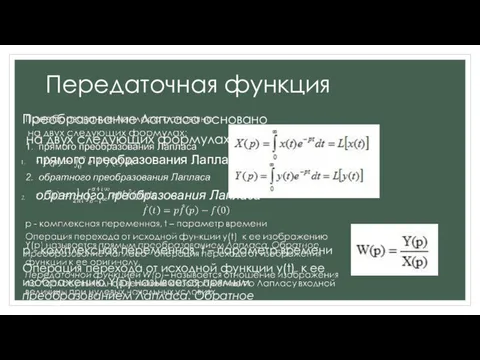
Передаточная функция
Преобразование Лапласа основано
на двух следующих формулах:
прямого преобразования Лапласа
обратного преобразования
Передаточная функция
Преобразование Лапласа основано
на двух следующих формулах:
прямого преобразования Лапласа
обратного преобразования
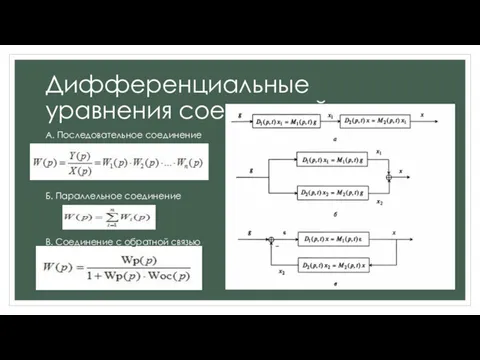
Дифференциальные уравнения соединений
А. Последовательное соединение
Б. Параллельное соединение
В. Соединение с обратной связью
Дифференциальные уравнения соединений
А. Последовательное соединение
Б. Параллельное соединение
В. Соединение с обратной связью

Пример 3 Заданы входной и выходной сигналы:
а) найти передаточную функцию W(p)
Пример 3 Заданы входной и выходной сигналы:
а) найти передаточную функцию W(p)

Решение:
а) Передаточная функция всей системы: б) Передаточная функция в виде
Произведения
Решение:
а) Передаточная функция всей системы: б) Передаточная функция в виде
Произведения
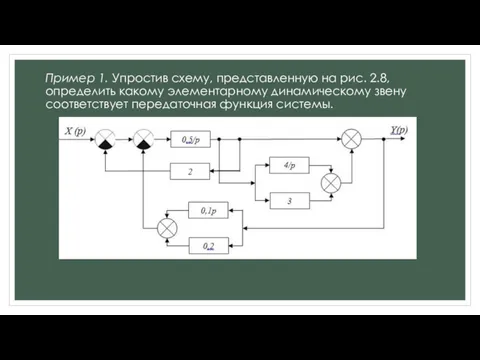
Пример 1. Упростив схему, представленную на рис. 2.8, определить какому элементарному
Пример 1. Упростив схему, представленную на рис. 2.8, определить какому элементарному
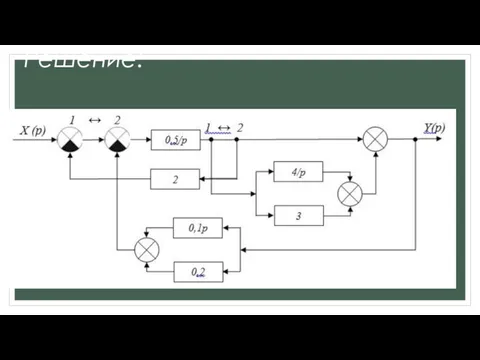
Решение:
Решение:
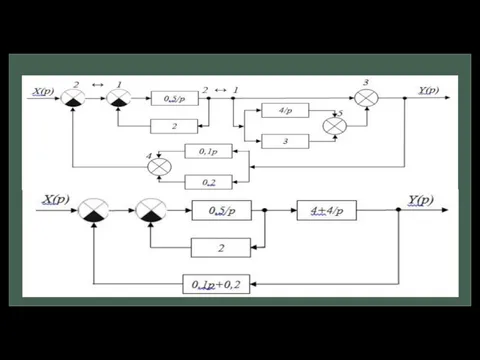

Передаточную функцию двух звеньев, соединенных встречно-параллельно с отрицательной обратной связью можно
Передаточную функцию двух звеньев, соединенных встречно-параллельно с отрицательной обратной связью можно
 Объём цилиндра
Объём цилиндра ПРЕЗЕНТАЦИЯ УРАВНЕНИЕ
ПРЕЗЕНТАЦИЯ УРАВНЕНИЕ Математика Тема: Маша и Медведь учатся считать
Математика Тема: Маша и Медведь учатся считать Что? Где? Когда? Математическая игра
Что? Где? Когда? Математическая игра Параллелепипед и ее элементы, виды и свойств. Площадь боковой и полной поверхности параллелепипеда
Параллелепипед и ее элементы, виды и свойств. Площадь боковой и полной поверхности параллелепипеда Элементы математической статистики
Элементы математической статистики Векторы в пространстве. Определение вектора в пространстве и связанные с ним понятия, равенство векторов
Векторы в пространстве. Определение вектора в пространстве и связанные с ним понятия, равенство векторов Решение логических задач
Решение логических задач устный счёт до 10
устный счёт до 10 Непараметрические критерии
Непараметрические критерии Сумма углов треугольника. Геометрия. 7 класс
Сумма углов треугольника. Геометрия. 7 класс Счастливый случай. Математическая игра
Счастливый случай. Математическая игра Параллельные прямые в пространстве. (10 класс)
Параллельные прямые в пространстве. (10 класс) состав числа 2 и 3
состав числа 2 и 3 Формулы тригонометрии
Формулы тригонометрии Деление многозначного на трёхзначное число. Решение задач.
Деление многозначного на трёхзначное число. Решение задач. Экспресс-тренинг по подготовке к ЕГЭ по математике
Экспресс-тренинг по подготовке к ЕГЭ по математике Cистема реального времени. Задачи в системах реального времени ( тема 2 )
Cистема реального времени. Задачи в системах реального времени ( тема 2 ) Презентация урока на тему: Таблица умножения и деления на 6. Закрепление. Урок-сказка.
Презентация урока на тему: Таблица умножения и деления на 6. Закрепление. Урок-сказка. Язык геометрических рисунков
Язык геометрических рисунков Основы сетевого планирования и управления (СПУ) разработками
Основы сетевого планирования и управления (СПУ) разработками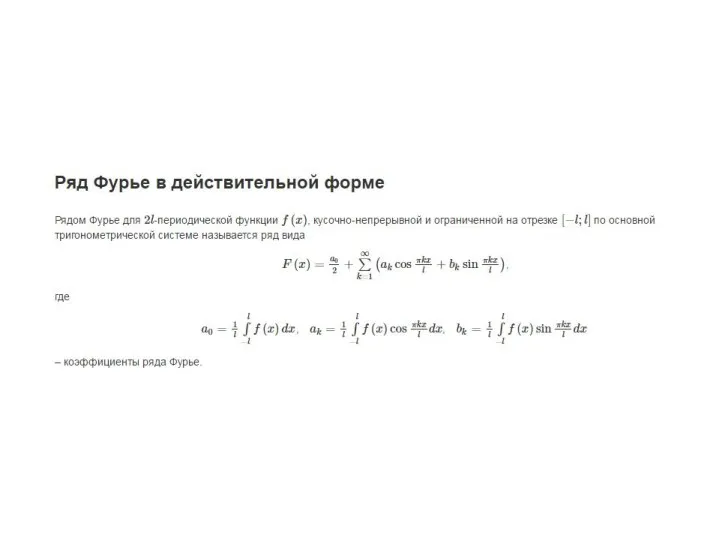 Ряды Фурье. Семинар 30
Ряды Фурье. Семинар 30 Расчет каналов. Гидравлика
Расчет каналов. Гидравлика Арифметическая прогрессия (9 класс)
Арифметическая прогрессия (9 класс) Формулы сокращенного умножения
Формулы сокращенного умножения Округление натуральных чисел
Округление натуральных чисел Презентация по математике Задача Диск
Презентация по математике Задача Диск Умножение вектора на число
Умножение вектора на число