- Математическое программирование. Математические основы сетевого планирования

Содержание
- 2. Математические основы сетевого планирования Цель: освоение теоретических основ и практических навыков решения задач c применением основ
- 3. План лекции Основные понятия теории графов; Способы представления графов; Решение задачи нахождения кратчайшего пути между вершинами
- 4. Основные понятия теории графов Граф – это математическая модель, с помощью которой удобно представлять бинарное отношение.
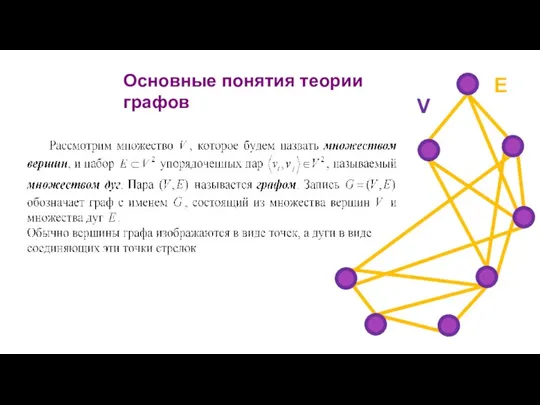
- 5. Основные понятия теории графов V E
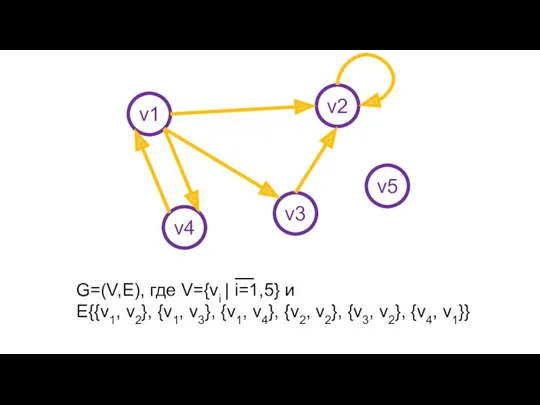
- 6. v1 v2 v3 v4 v5 G=(V,E), где V={vi | i=1,5} и E{{v1, v2}, {v1, v3}, {v1,
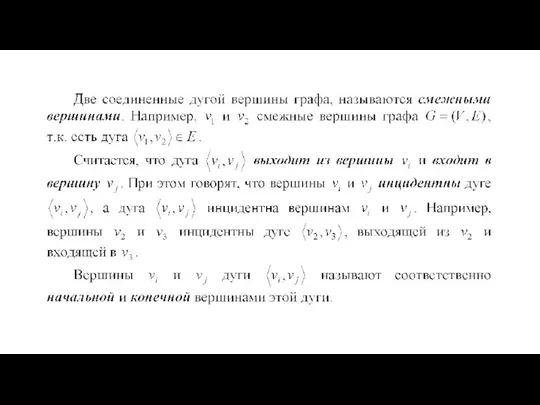
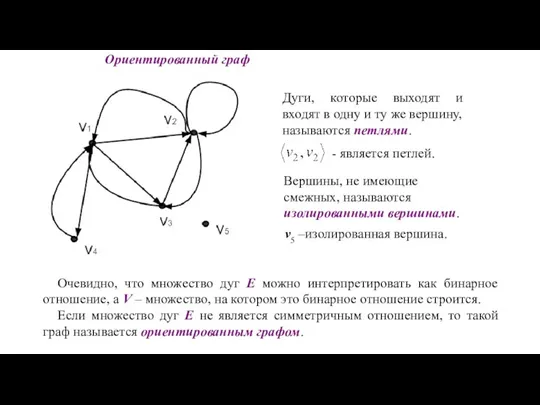
- 8. Дуги, которые выходят и входят в одну и ту же вершину, называются петлями. Вершины, не имеющие
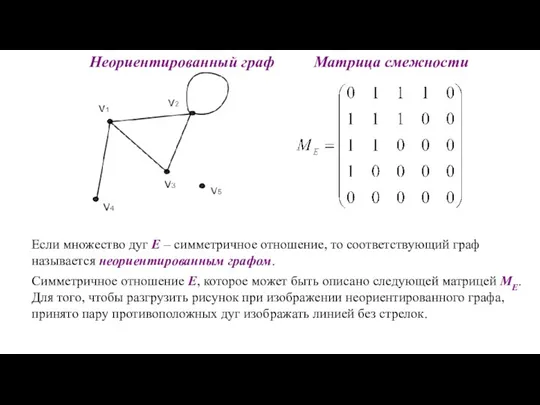
- 9. Если множество дуг E – симметричное отношение, то соответствующий граф называется неориентированным графом. Cимметричное отношение E,
- 10. Для того, чтобы подчеркнуть, что порядок вершин в неориентированном графе не имеет значения, при обозначении пар
- 12. Следует обратить внимание, что петле в матрице M соответствует столбец с одной положительной единицей, что не
- 14. При программировании реальных задач теории графов, как правило, применяются матрица смежности и списки смежных вершин. При
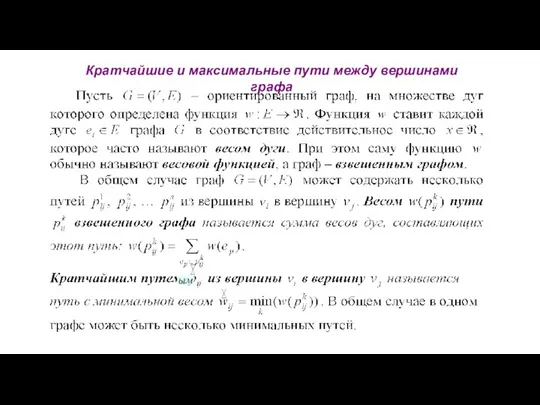
- 15. Кратчайшие и максимальные пути между вершинами графа ым
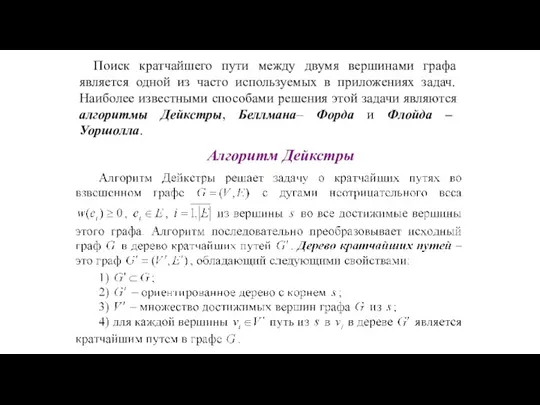
- 16. Поиск кратчайшего пути между двумя вершинами графа является одной из часто используемых в приложениях задач. Наиболее
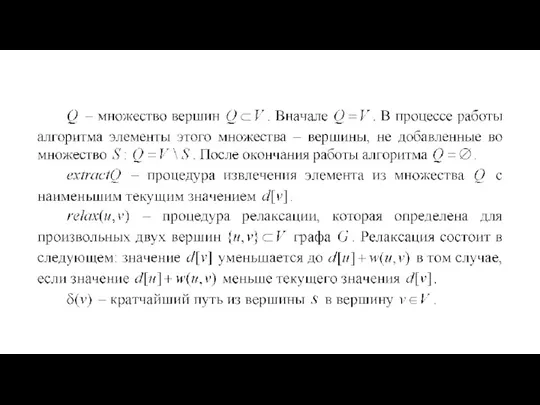
- 18. Для пояснения работы алгоритма Дейкстры будем использовать следующие обозначения.
- 21. Основной цикл алгоритма (строки 1–9) на рис. выполняется до тех пор, пока все вершины графа не
- 22. 0 1 2 4 3 10 1 9 5 3 2 4 7 2 6
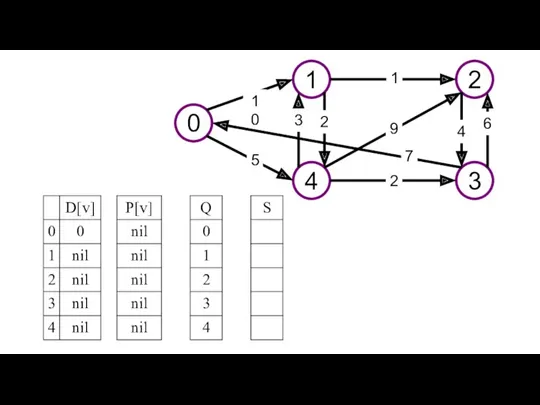
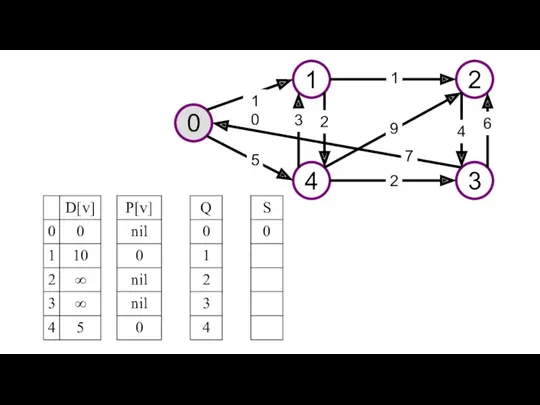
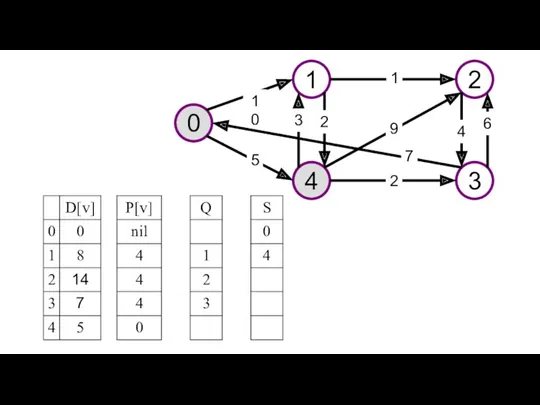
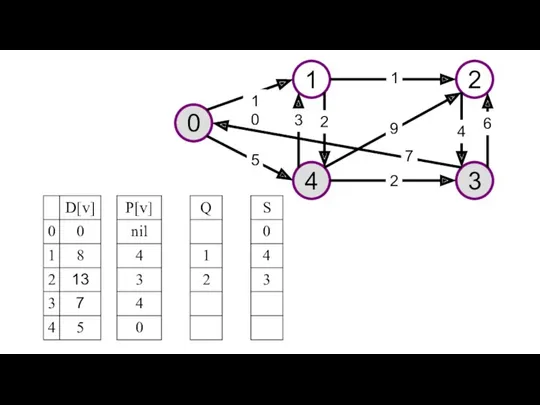
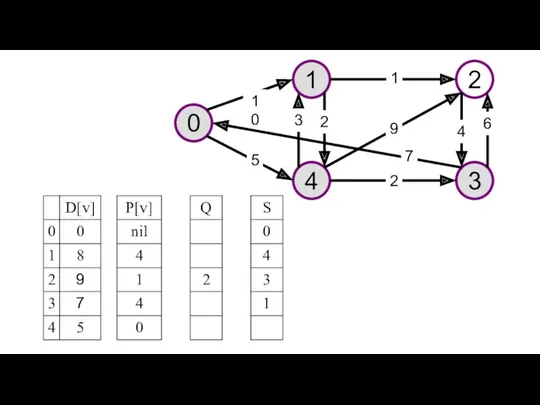
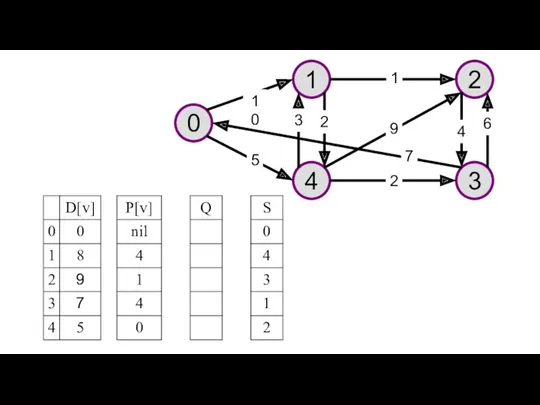
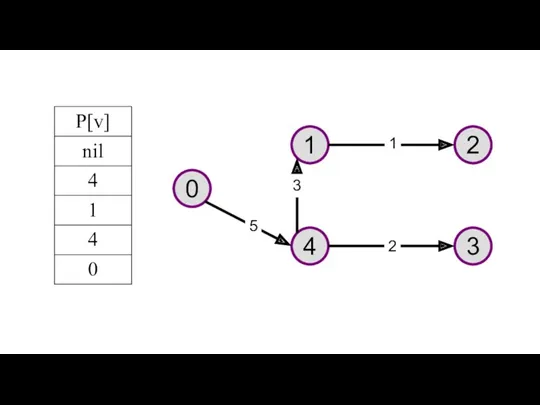
- 23. Приведен пример решения задачи поиска кратчайшего пути в графе с помощью алгоритма Дейкстры. Изображен исходный граф
- 24. 0 1 2 4 3 10 1 9 5 3 2 4 7 2 6
- 25. 0 1 2 4 3 10 1 9 5 3 2 4 7 2 6
- 26. 0 1 2 4 3 10 1 9 5 3 2 4 7 2 6
- 27. 0 1 2 4 3 10 1 9 5 3 2 4 7 2 6
- 28. 0 1 2 4 3 10 1 9 5 3 2 4 7 2 6
- 29. 0 1 2 4 3 1 5 3 2
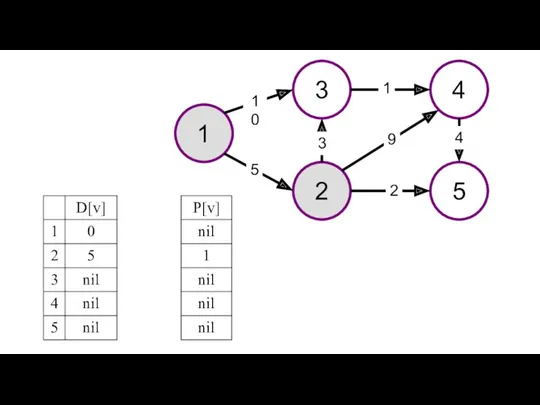
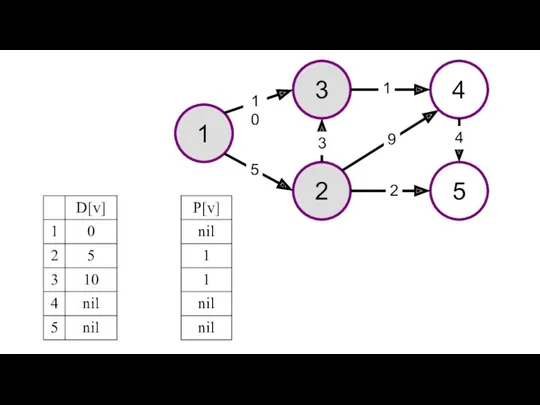
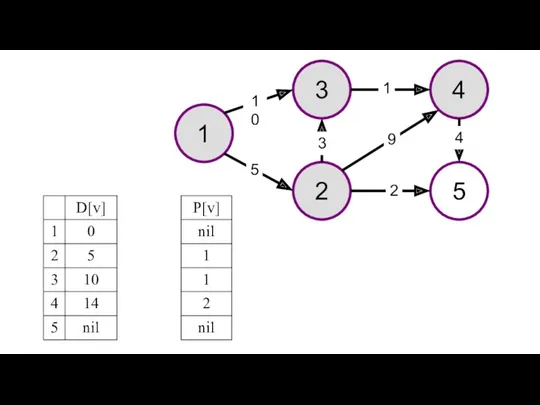
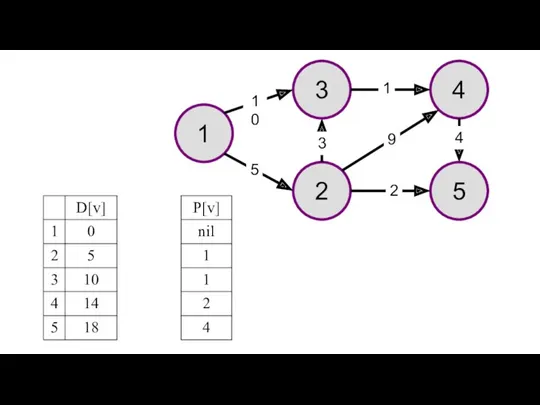
- 30. При расчете временных характеристик сетевого графика, необходимо найти критический путь, определяющий минимальное время выполнения проекта. Отыскание
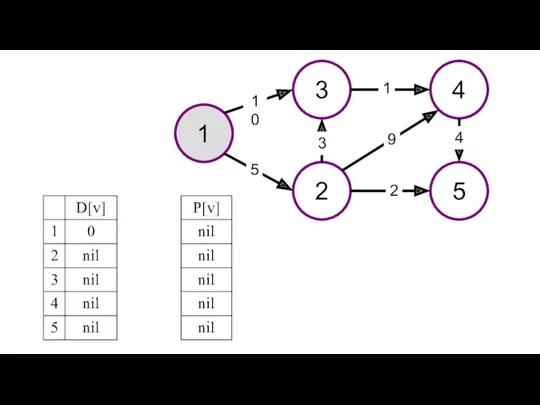
- 32. Представлен пример решения задачи поиска максимального пути в графе. На рисунках изображен заданный граф и проинициализированные
- 33. 1 3 4 2 5 10 1 9 5 3 2 4
- 34. 1 3 4 2 5 10 1 9 5 3 2 4
- 35. 1 3 4 2 5 10 1 9 5 3 2 4
- 36. 1 3 4 2 5 10 1 9 5 3 2 4
- 37. 1 3 4 2 5 10 1 9 5 3 2 4
- 39. Скачать презентацию
Математические основы сетевого планирования
Цель: освоение теоретических основ и практических навыков решения
Математические основы сетевого планирования
Цель: освоение теоретических основ и практических навыков решения
План лекции
Основные понятия теории графов;
Способы представления графов;
Решение задачи нахождения кратчайшего пути
План лекции
Основные понятия теории графов;
Способы представления графов;
Решение задачи нахождения кратчайшего пути
Основные понятия теории графов
Граф – это математическая модель, с помощью которой
Основные понятия теории графов
Граф – это математическая модель, с помощью которой
Основные понятия теории графов
V
E
Основные понятия теории графов
V
E
v1
v2
v3
v4
v5
G=(V,E), где V={vi | i=1,5} и
E{{v1, v2}, {v1, v3}, {v1, v4},
v1
v2
v3
v4
v5
G=(V,E), где V={vi | i=1,5} и
E{{v1, v2}, {v1, v3}, {v1, v4},
Дуги, которые выходят и входят в одну и ту же вершину,
Дуги, которые выходят и входят в одну и ту же вершину,
Если множество дуг E – симметричное отношение, то соответствующий граф называется
Если множество дуг E – симметричное отношение, то соответствующий граф называется
Для того, чтобы подчеркнуть, что порядок вершин в неориентированном графе не
Для того, чтобы подчеркнуть, что порядок вершин в неориентированном графе не


Следует обратить внимание, что петле в матрице M соответствует столбец с
Следует обратить внимание, что петле в матрице M соответствует столбец с

При программировании реальных задач теории графов, как правило, применяются матрица смежности
При программировании реальных задач теории графов, как правило, применяются матрица смежности
Кратчайшие и максимальные пути между вершинами графа
ым
Кратчайшие и максимальные пути между вершинами графа
ым
Поиск кратчайшего пути между двумя вершинами графа является одной из часто
Поиск кратчайшего пути между двумя вершинами графа является одной из часто
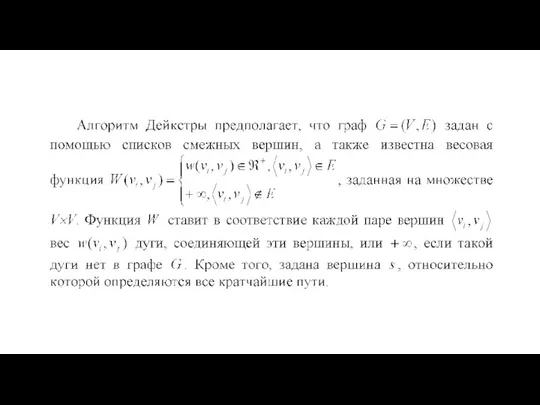
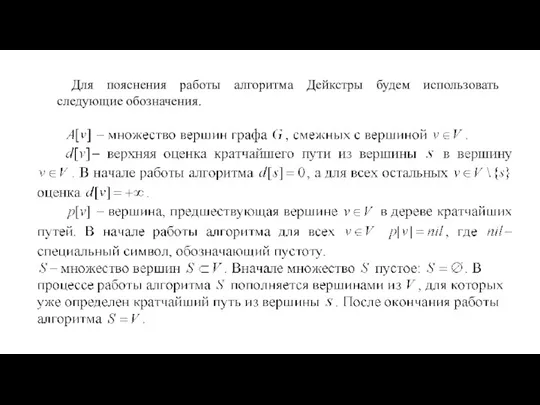
Для пояснения работы алгоритма Дейкстры будем использовать следующие обозначения.
Для пояснения работы алгоритма Дейкстры будем использовать следующие обозначения.

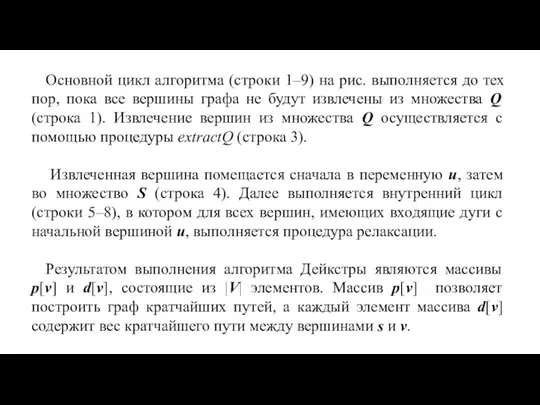
Основной цикл алгоритма (строки 1–9) на рис. выполняется до тех пор,
Основной цикл алгоритма (строки 1–9) на рис. выполняется до тех пор,
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
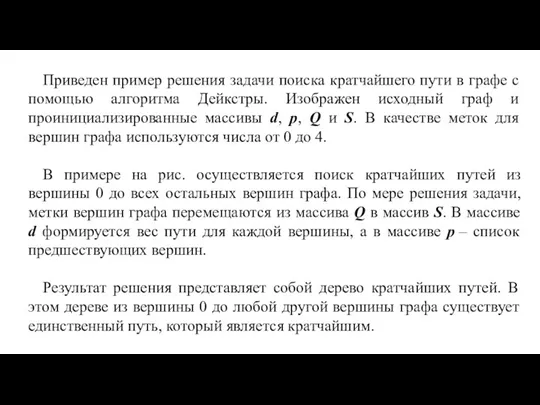
Приведен пример решения задачи поиска кратчайшего пути в графе с помощью
Приведен пример решения задачи поиска кратчайшего пути в графе с помощью
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
10
1
9
5
3
2
4
7
2
6
0
1
2
4
3
1
5
3
2
0
1
2
4
3
1
5
3
2
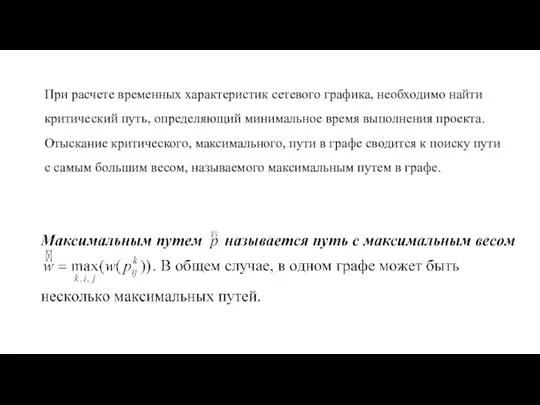
При расчете временных характеристик сетевого графика, необходимо найти критический путь, определяющий
При расчете временных характеристик сетевого графика, необходимо найти критический путь, определяющий
Представлен пример решения задачи поиска максимального пути в графе.
На рисунках изображен
Представлен пример решения задачи поиска максимального пути в графе.
На рисунках изображен
1
3
4
2
5
10
1
9
5
3
2
4
1
3
4
2
5
10
1
9
5
3
2
4
1
3
4
2
5
10
1
9
5
3
2
4
1
3
4
2
5
10
1
9
5
3
2
4
1
3
4
2
5
10
1
9
5
3
2
4
1
3
4
2
5
10
1
9
5
3
2
4
1
3
4
2
5
10
1
9
5
3
2
4
1
3
4
2
5
10
1
9
5
3
2
4
1
3
4
2
5
10
1
9
5
3
2
4
1
3
4
2
5
10
1
9
5
3
2
4
 Презентация к уроку математики Круг. Окружность. Радиус. Диаметр 3 класс
Презентация к уроку математики Круг. Окружность. Радиус. Диаметр 3 класс Аксонометрические проекции геометрических тел
Аксонометрические проекции геометрических тел Выборки. Проблемы контроля в экспериментальных исследованиях
Выборки. Проблемы контроля в экспериментальных исследованиях Решение задач на нахождение части от числа
Решение задач на нахождение части от числа Приближенные значения действительных чисел
Приближенные значения действительных чисел Числовые выражения, содержащие знаки + и -
Числовые выражения, содержащие знаки + и - Знакомство с задачей
Знакомство с задачей Секреты таблицы умножения. 4 класс
Секреты таблицы умножения. 4 класс Үш таңбалы сандарды ауызша қосу және азайту. Матем (1-т)
Үш таңбалы сандарды ауызша қосу және азайту. Матем (1-т) Прибавление числа 6 с переходом через десяток
Прибавление числа 6 с переходом через десяток Сложение и вычитание десятичных дробей. Урок 106. Математика. 5 класс
Сложение и вычитание десятичных дробей. Урок 106. Математика. 5 класс Функції. Властивості функцій. Перетворення графіків функцій
Функції. Властивості функцій. Перетворення графіків функцій Что такое алгебра?
Что такое алгебра? Метрология, стандартизация, сертификация
Метрология, стандартизация, сертификация Тренажёр Многозначные числа
Тренажёр Многозначные числа Презентация к уроку по математике (2 класс) по теме Письменный прием сложения вида 45+23
Презентация к уроку по математике (2 класс) по теме Письменный прием сложения вида 45+23 Определение степени с целым отрицательным показателем. 8 класс
Определение степени с целым отрицательным показателем. 8 класс Математика уступает свои крепости лишь сильным и смелым
Математика уступает свои крепости лишь сильным и смелым Прямоугольный параллелепипед. Урок по геометрии в 10 классе
Прямоугольный параллелепипед. Урок по геометрии в 10 классе Исследовательская работа Хитрые приемы быстрого счета. 5 класс
Исследовательская работа Хитрые приемы быстрого счета. 5 класс Фракталы
Фракталы Классификация погрешностей
Классификация погрешностей Программа курса по высшей математике
Программа курса по высшей математике Табличное умножение и деление. 2 класс
Табличное умножение и деление. 2 класс Открытый урок по математике 2 класс
Открытый урок по математике 2 класс Сложение и вычитание смешанных чисел. 5 класс
Сложение и вычитание смешанных чисел. 5 класс Решение задач на готовых чертежах. Подобные
Решение задач на готовых чертежах. Подобные Треугольник и его виды
Треугольник и его виды