- Методы графического дифференцирования

Содержание
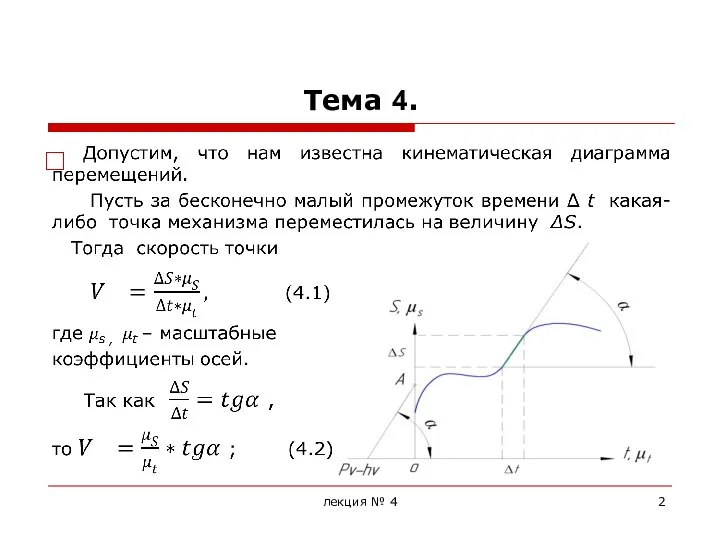
- 2. Тема 4. лекция № 4
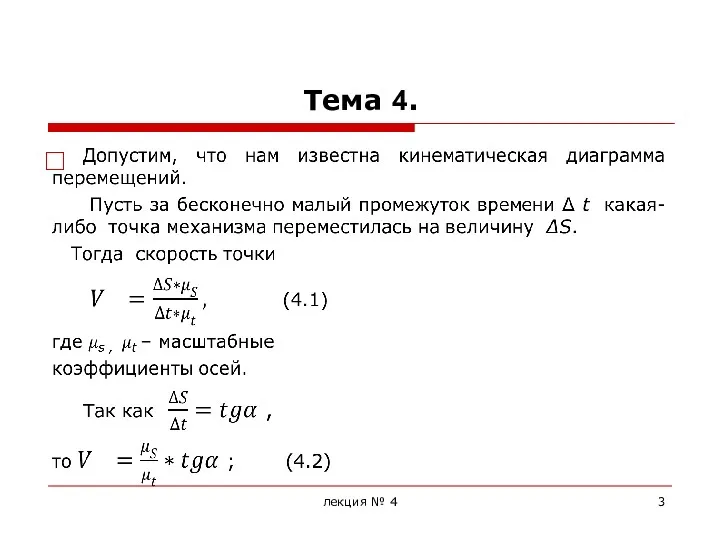
- 3. Тема 4. лекция № 4
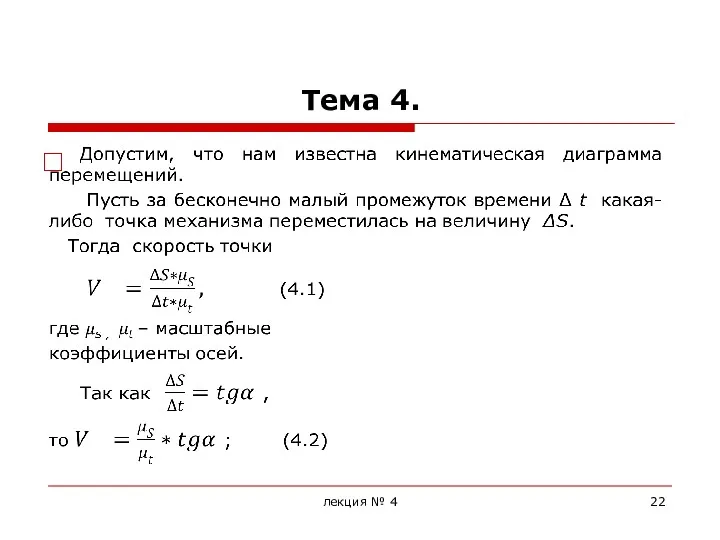
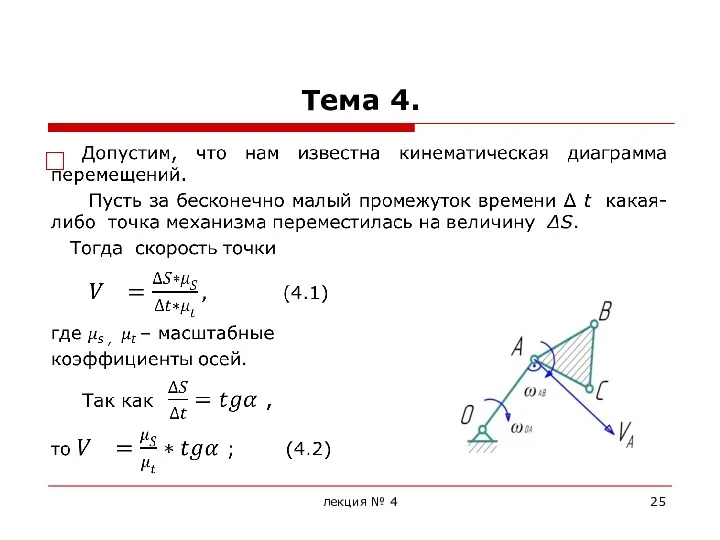
- 4. Тема 4. 4.3.3. Определение скоростей и ускорений графическим методом. Сначала строится несколько (12 и более) совмещенных
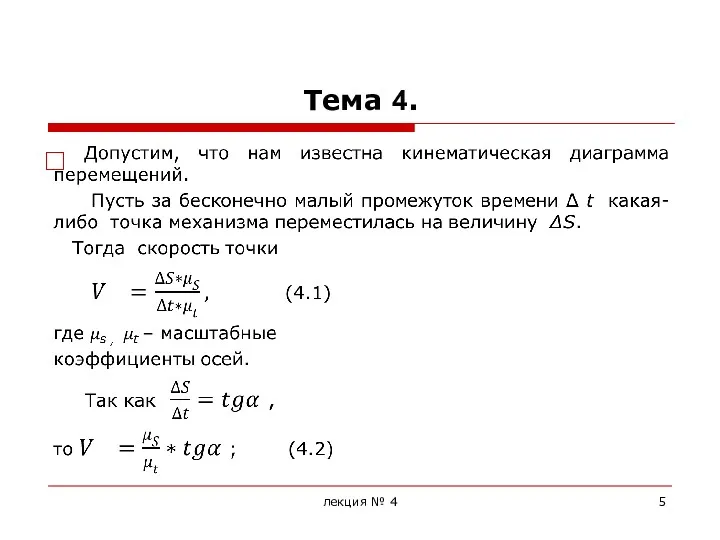
- 5. Тема 4. лекция № 4
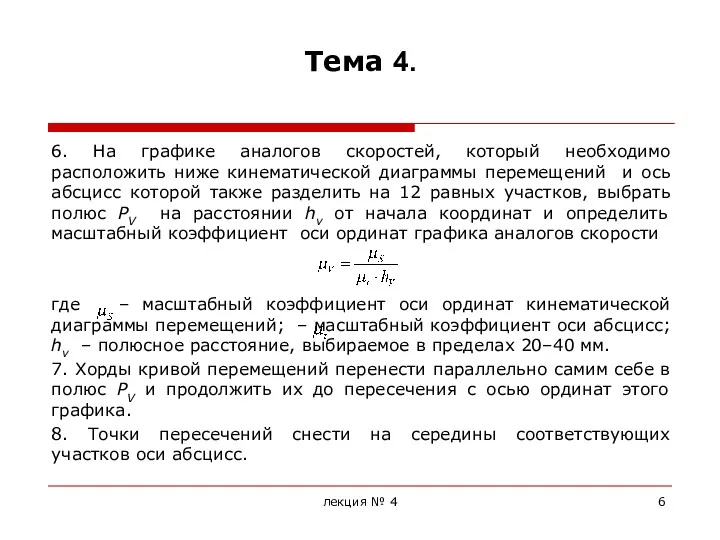
- 6. Тема 4. 6. На графике аналогов скоростей, который необходимо расположить ниже кинематической диаграммы перемещений и ось
- 7. Тема 4. лекция № 4
- 8. Тема 4. лекция № 4
- 9. Тема 4. лекция № 4
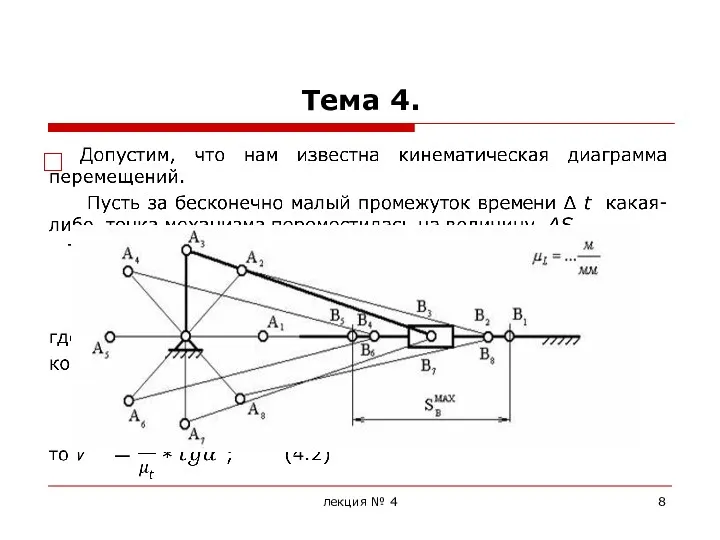
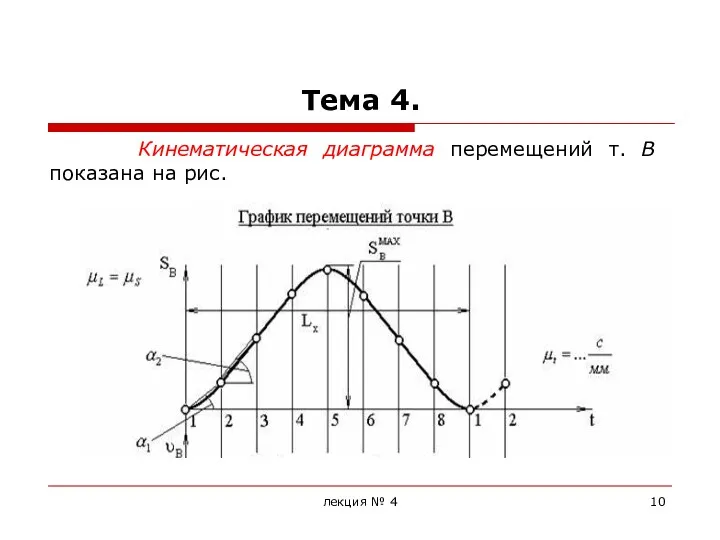
- 10. Тема 4. лекция № 4 Кинематическая диаграмма перемещений т. В показана на рис.
- 11. Тема 4
- 12. Тема 4. лекция № 4
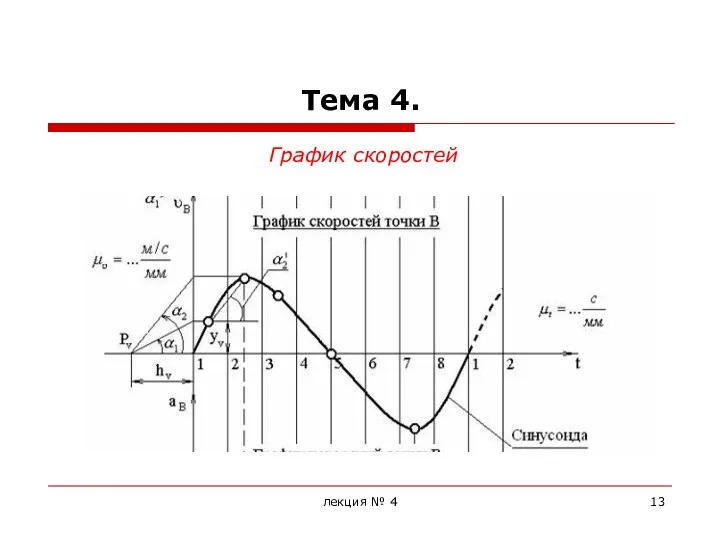
- 13. Тема 4. График скоростей лекция № 4
- 14. Тема 4. лекция № 4
- 15. Тема 4. График ускорений лекция № 4
- 16. Тема 4
- 17. Тема 4. 4.4. Графоаналитический метод кинематического анализа механизмов (метод планов) Графоаналитический метод кинематического исследования механизмов основан
- 18. Тема 4. 4.4.1. Планы скоростей плоских механизмов. Планом скоростей называется чертеж, на котором изображены в определенном
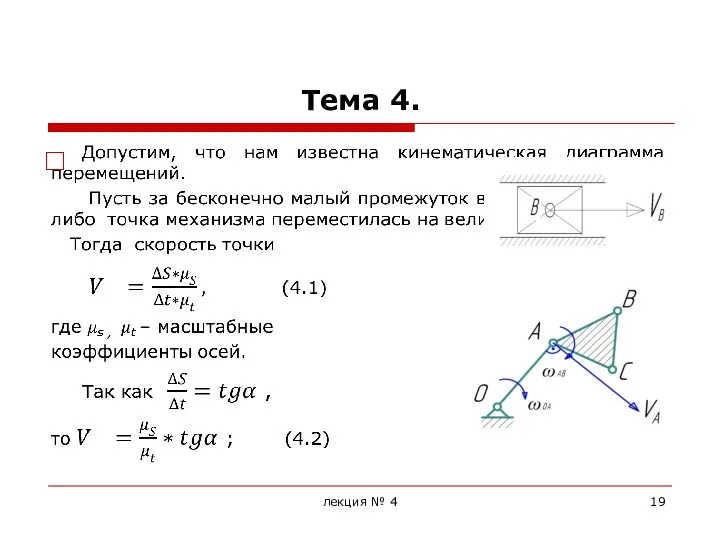
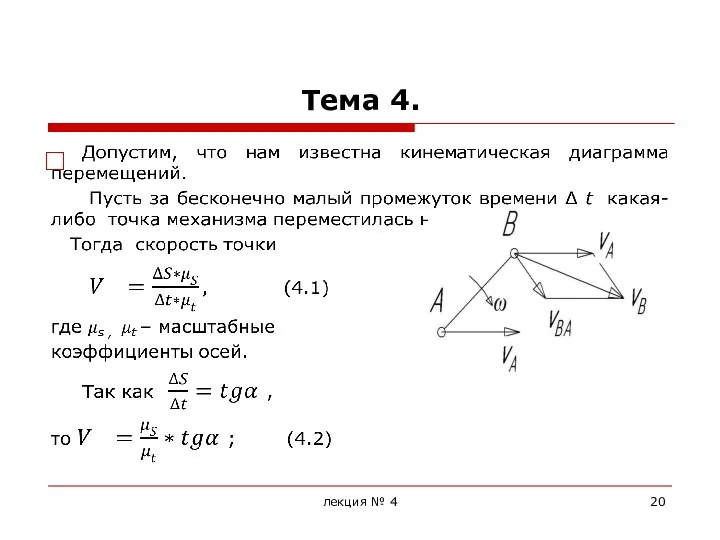
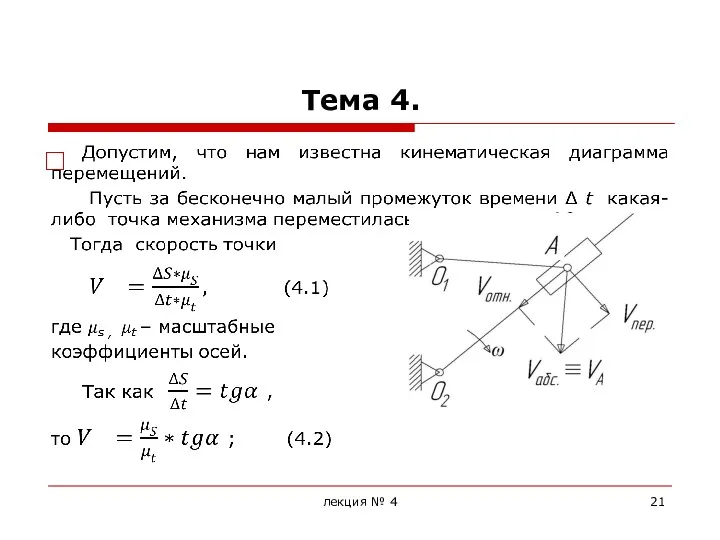
- 19. Тема 4. лекция № 4
- 20. Тема 4. лекция № 4
- 21. Тема 4. лекция № 4
- 22. Тема 4. лекция № 4
- 23. Тема 4. 5. На основе зависимостей между скоростями точек при различных движениях звеньев определить величины и
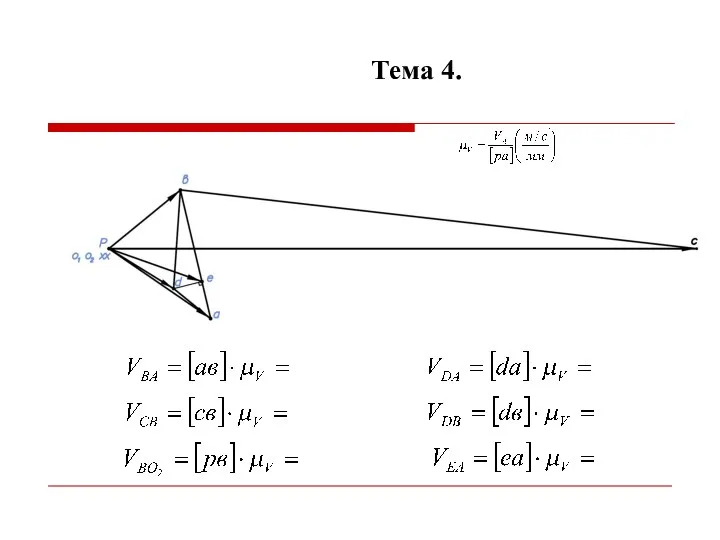
- 24. Тема 4. Свойства плана скоростей: 1. Отрезки плана скоростей, проходящие через полюс, изображают абсолютные скорости. Направление
- 25. Тема 4. лекция № 4
- 26. Тема 4. лекция № 4
- 27. Тема 4. лекция № 4
- 28. Тема 4. лекция № 4
- 29. Тема 4. лекция № 4
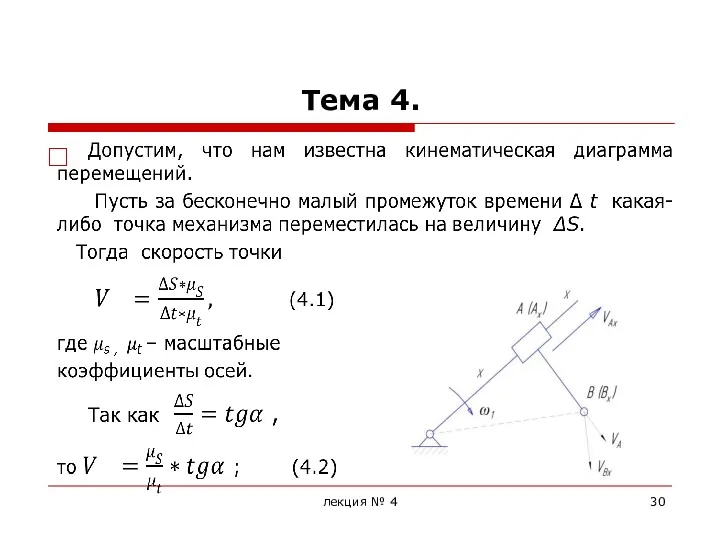
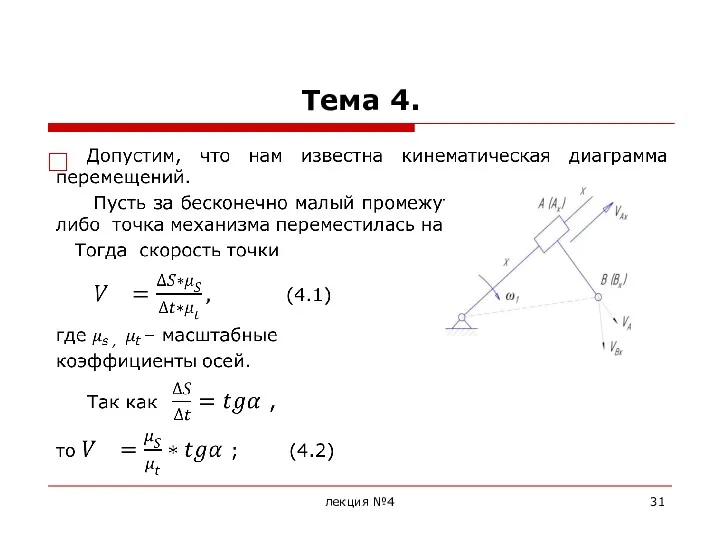
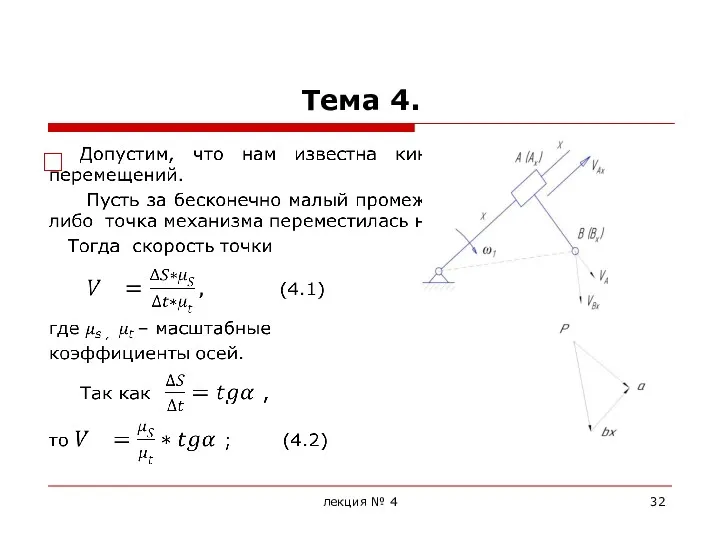
- 30. Тема 4. лекция № 4
- 31. Тема 4. лекция №4
- 32. Тема 4. лекция № 4
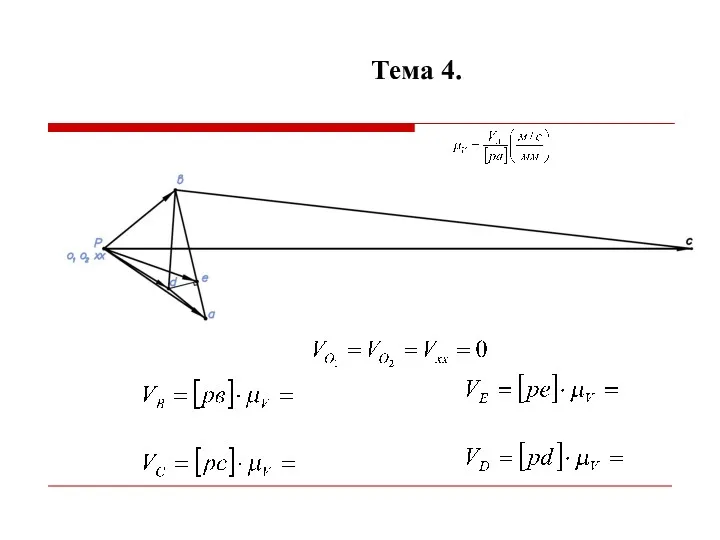
- 33. Тема 4. После построения плана скоростей и определения значений скоростей всех характерных точек механизма переходят к
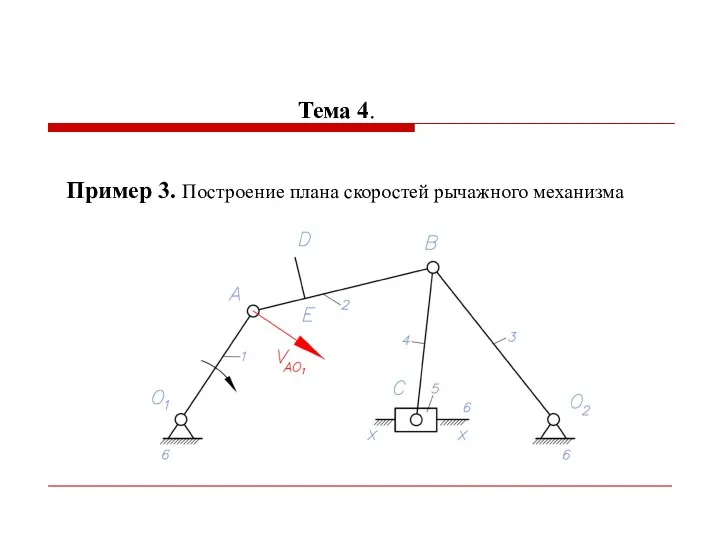
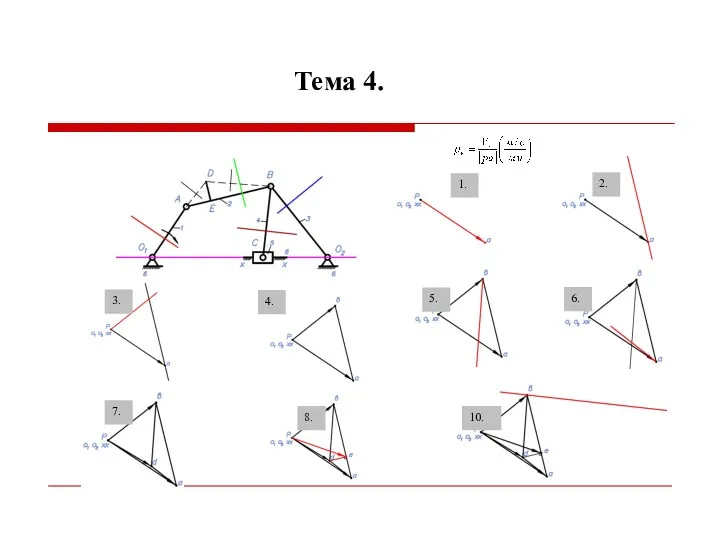
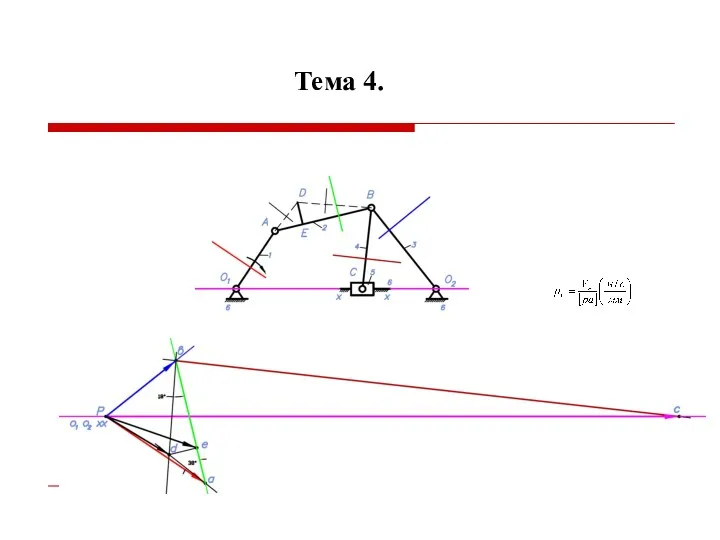
- 34. Тема 4. Пример 3. Построение плана скоростей рычажного механизма
- 35. Тема 4. 1. 2. 3. 4. 5. 6. 7. 8. 10.
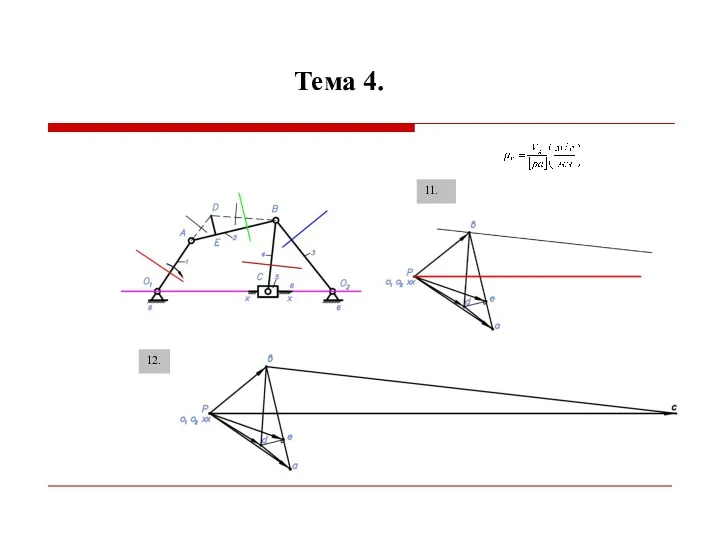
- 36. Тема 4. 12. 11.
- 37. Тема 4.
- 38. Тема 4.
- 39. Тема 4.
- 41. Скачать презентацию
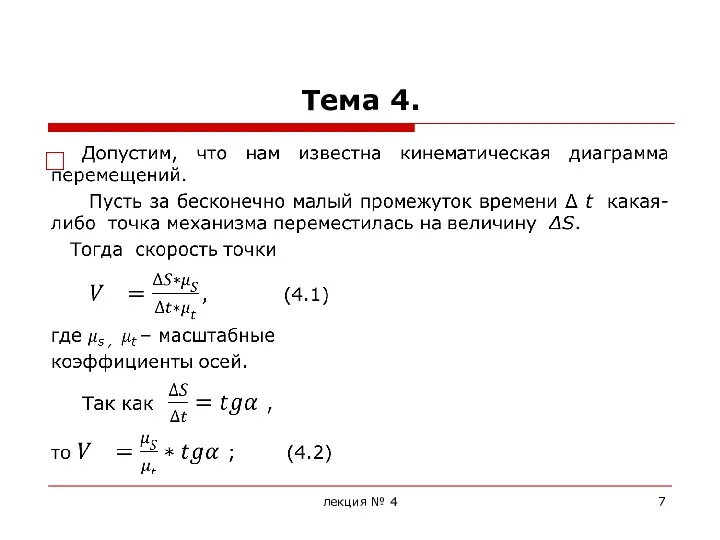
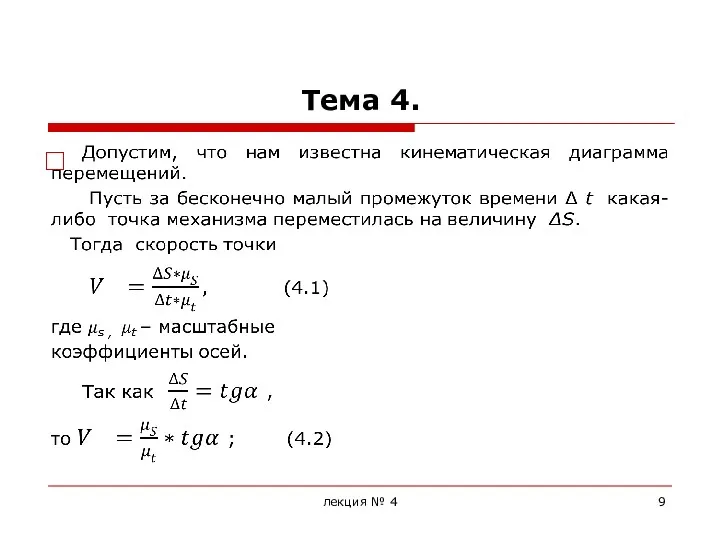
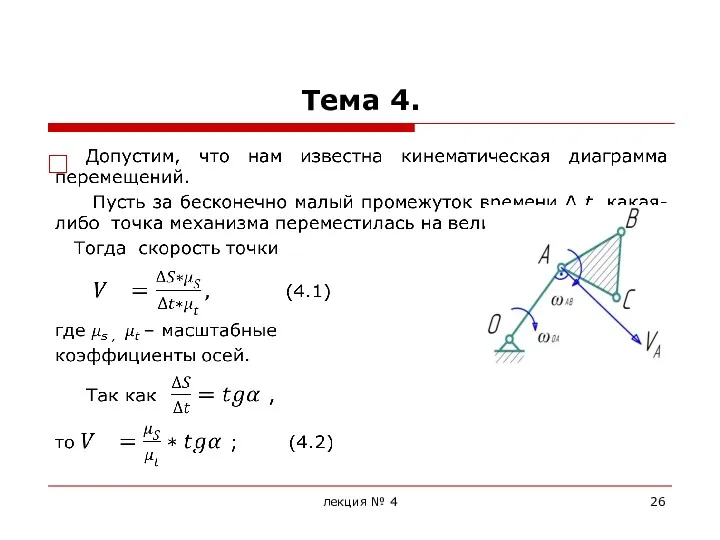
Тема 4.
лекция № 4
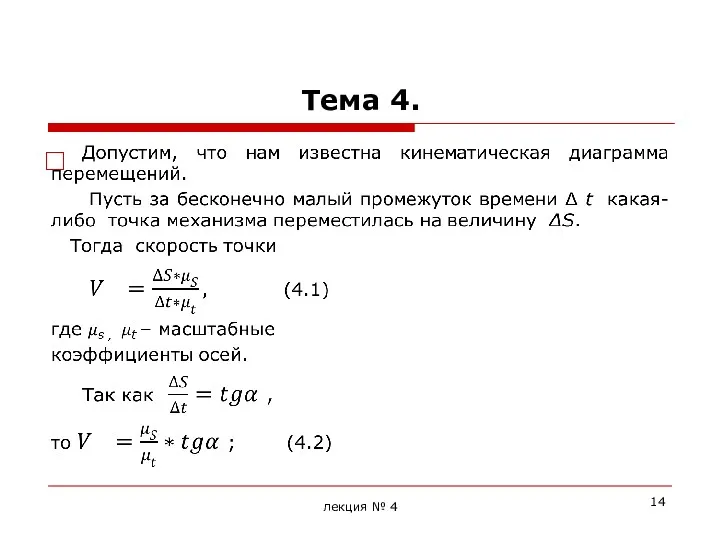
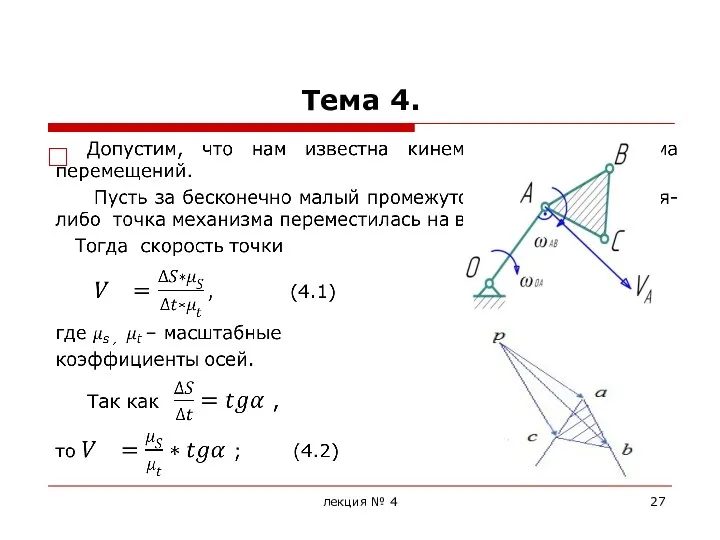
Тема 4.
лекция № 4
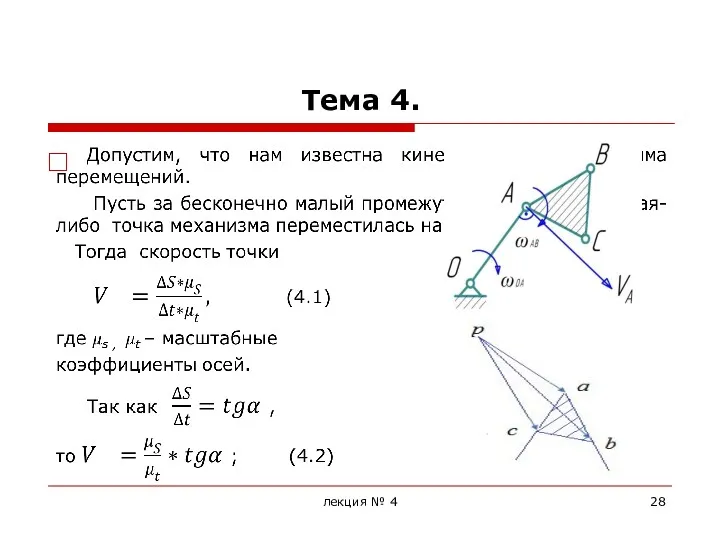
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
4.3.3. Определение скоростей и ускорений графическим методом.
Сначала
Тема 4.
4.3.3. Определение скоростей и ускорений графическим методом.
Сначала
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
6. На графике аналогов скоростей, который необходимо расположить ниже кинематической
Тема 4.
6. На графике аналогов скоростей, который необходимо расположить ниже кинематической
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Кинематическая диаграмма перемещений т. В показана
Тема 4.
лекция № 4
Кинематическая диаграмма перемещений т. В показана
Тема 4
Тема 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
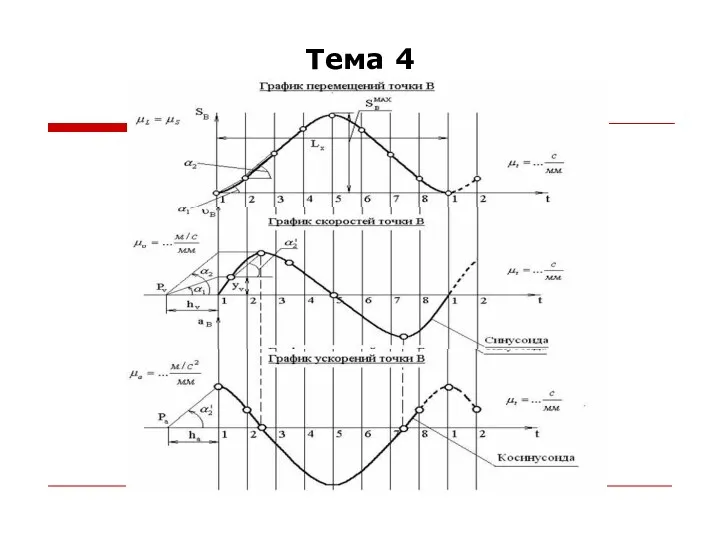
График скоростей
лекция № 4
Тема 4.
График скоростей
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
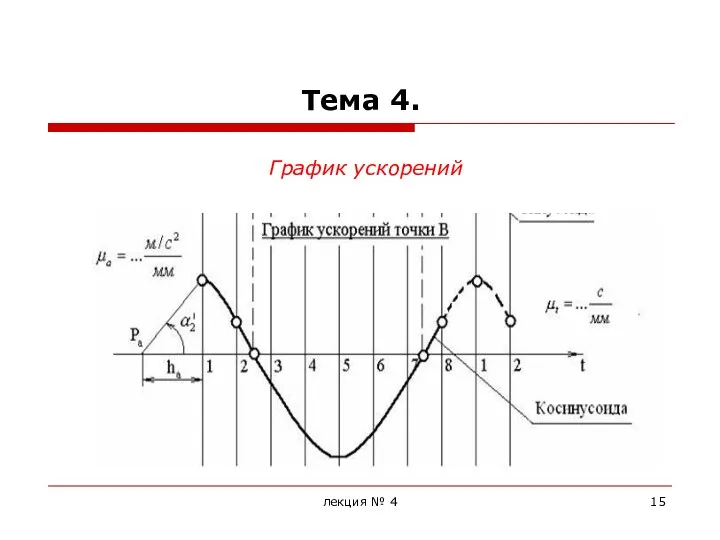
График ускорений
лекция № 4
Тема 4.
График ускорений
лекция № 4
Тема 4
Тема 4
Тема 4.
4.4. Графоаналитический метод кинематического анализа механизмов (метод планов)
Графоаналитический
Тема 4.
4.4. Графоаналитический метод кинематического анализа механизмов (метод планов)
Графоаналитический
Тема 4.
4.4.1. Планы скоростей плоских механизмов.
Планом скоростей называется
Тема 4.
4.4.1. Планы скоростей плоских механизмов.
Планом скоростей называется
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
5. На основе зависимостей между скоростями точек при различных
Тема 4.
5. На основе зависимостей между скоростями точек при различных
Тема 4.
Свойства плана скоростей:
1. Отрезки плана скоростей, проходящие через полюс,
Тема 4.
Свойства плана скоростей:
1. Отрезки плана скоростей, проходящие через полюс,
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
лекция №4
Тема 4.
лекция №4
Тема 4.
лекция № 4
Тема 4.
лекция № 4
Тема 4.
После построения плана скоростей и определения значений скоростей
Тема 4.
После построения плана скоростей и определения значений скоростей
Тема 4.
Пример 3. Построение плана скоростей рычажного механизма
Тема 4.
Пример 3. Построение плана скоростей рычажного механизма
Тема 4.
1.
2.
3.
4.
5.
6.
7.
8.
10.
Тема 4.
1.
2.
3.
4.
5.
6.
7.
8.
10.
Тема 4.
12.
11.
Тема 4.
12.
11.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
 Применение производной в науке и технике
Применение производной в науке и технике Умножение и деление чисел
Умножение и деление чисел Наибольший общий делитель. Взаимно простые числа
Наибольший общий делитель. Взаимно простые числа Понятие вектора. Равенство векторов
Понятие вектора. Равенство векторов Взаимное пересечение кривых поверхностей. Лекция 12
Взаимное пересечение кривых поверхностей. Лекция 12 Умножение десятичных дробей
Умножение десятичных дробей Конспект интерактивной познавательно-развивающей игры воспитателя с детьми среднего дошкольного возраста по развитию сенсорных математических представлений с использованием блоков Дьенеша Домик для зверят.
Конспект интерактивной познавательно-развивающей игры воспитателя с детьми среднего дошкольного возраста по развитию сенсорных математических представлений с использованием блоков Дьенеша Домик для зверят. Карта и ее математическая основа
Карта и ее математическая основа Конспект НОД по сенсорному развитию в первой младшей группе (с использованием презентации). Лесные жители. Игра Выкладывание елочек из треугольников.
Конспект НОД по сенсорному развитию в первой младшей группе (с использованием презентации). Лесные жители. Игра Выкладывание елочек из треугольников. Логика высказываний
Логика высказываний Задачи на увеличение числа в несколько раз
Задачи на увеличение числа в несколько раз Конспект урока и презентация по математике Сложение и вычитание в пределах 20.
Конспект урока и презентация по математике Сложение и вычитание в пределах 20. Повторення вивченого. Обчислення на основі нумерації. Порівняння числа і виразу. Розв'язування задач різних типів. Урок №113
Повторення вивченого. Обчислення на основі нумерації. Порівняння числа і виразу. Розв'язування задач різних типів. Урок №113 Презентация Задачи в стихах
Презентация Задачи в стихах Метод координат
Метод координат Презентация Знакомимся с цифрами
Презентация Знакомимся с цифрами Многогранники
Многогранники Деление с остатком
Деление с остатком Конспект урока Умножение и деление на 100 3 класс
Конспект урока Умножение и деление на 100 3 класс Умножение десятичных дробей
Умножение десятичных дробей Сложение и умножение числовых неравенств
Сложение и умножение числовых неравенств Распределения непрерывных случайных величин
Распределения непрерывных случайных величин Прямая и обратная пропорциональность. 6 класс
Прямая и обратная пропорциональность. 6 класс Умножение десятичных дробей на натуральные числа
Умножение десятичных дробей на натуральные числа Центральная и осевая симметрия
Центральная и осевая симметрия Организация непрерывной непосредственно образовательной деятельности детей в младшей группе по теме: Обобщение понятий много, один. Диск
Организация непрерывной непосредственно образовательной деятельности детей в младшей группе по теме: Обобщение понятий много, один. Диск Сложение - занятие на основе тетради Раз ступенька, два ступенька
Сложение - занятие на основе тетради Раз ступенька, два ступенька Презентация к уроку математики по теме Задачи на умножение
Презентация к уроку математики по теме Задачи на умножение