- Оптимизация природопользования

Содержание
- 2. Основаниями классификации (выделения) природно-антропогенных ландшафтов являются три критерия: «…а) степень антропогенной трансформации природных ландшафтов…; б) наличие
- 3. «…для перехода земной цивилизации к устойчивому развитию необходимо решить две взаимосвязанные ландшафтно-экологические задачи планетарного масштаба. Первая
- 4. «Проектирование - это начало изменений в окружающей человека искусственной среде» Дж. К. Джонс Выражения, связывающее цель
- 5. Допустимой областью Х является интервал углов ϕ поворота ручки настройки между начальными ϕн и конечными значениями
- 6. Задача оптимизации - поиск минимума целевой функции: F(x)→ min x∈ Х Если множество всех вариантов Х,
- 7. Для решения задач оптимизации необходимо: А) Составить математическую модель объекта оптимизации Б) Выбрать критерий оптимальности и
- 8. Метод деления интервала пополам Метод перебора (общего поиска) Одномерная оптимизация: 1). Сужение интервала неопределенности Метод «золотого
- 9. Рельеф функции F(x,y)=10(y-sin x)2+0.1x2 А Б Рельеф значений F(x,y): А- котловинный, Б – овражный, нанесены линии
- 10. Метод координатного спуска (метод Гаусса) F(x,y,z) - функция 3-х переменных. Пусть нулевое приближение x0 , y0
- 11. Метод оврагов
- 12. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ [Канторович, 1939] 1. Задача об использовании сырья Если предприятие выпускает х1 единиц продукции вида
- 13. Геометрический смысл основной задачи линейного программирования Требуя неотрицательности всех неизвестных приходим к системе неравенств многоугольник решений
- 14. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ 2. Транспортная задача а1, a2 - ед. груза на станциях отправления, b1, b2, b3
- 15. Многоугольник решений Оптимальное решение в точке N(10, 10) x11 = 10, x12 = 10, Fmin =
- 16. Найти максимум целевой функции при условиях: ограничения на имеющиеся природные ресурсы выполнения предъявляемых к насаждениям требований
- 17. Географические ограничения по ресурсам в задачах оптимизации продукционных процессов [Нестеров, Бредихин, 1970 ]
- 18. Биоэкологические коэффициенты apj и коэффициенты сj функционала максимальной продуктивности для оптимизации состава древесных пород на дерново-среднеподзолистых
- 19. При решении задачи (1)-(2) с условиями ограничения на ресурсы и коэффициентами функционала цели «достижение максимального прироста»
- 20. Найти максимум математического ожидания целевой функции Условия ограничения: 1. По удовлетворению потребностей экономики в лесной продукции
- 21. Система, точнее - динамическая система (которая развивается, эволюционирует во времени) в каждый момент времени пребывает в
- 22. Постановка задачи оптимального управления включает: 1. Систему дифференциальных уравнений, описывающих поведение (функционирование) данного объекта и 2.
- 23. с начальными условиями V – мощность лесоперерабатывающего предприятия, R – запас леса на выделенной территории. Доля
- 24. Оптимальное управление вырубкой плакорных пихтовых лесов Приангарья Si, площади занятые i –м типом леса; - интенсивность
- 25. Блок-схема динамической системы лесопользования разновозрастным древостоем Средневозрастные деревья, y Спелые, перестойные деревья, z Молодые деревья, подрост
- 26. с краевыми условиями: Функции управления u1(t), u2(t) - скорость вырубки деревьев среднего и старшего возрастов: Цель
- 28. Скачать презентацию
Основаниями классификации (выделения) природно-антропогенных ландшафтов являются три критерия:
«…а) степень
Основаниями классификации (выделения) природно-антропогенных ландшафтов являются три критерия:
«…а) степень
«…для перехода земной цивилизации к устойчивому развитию необходимо решить две
«…для перехода земной цивилизации к устойчивому развитию необходимо решить две
«Проектирование - это начало изменений в окружающей человека искусственной среде»
Дж.
«Проектирование - это начало изменений в окружающей человека искусственной среде»
Дж.
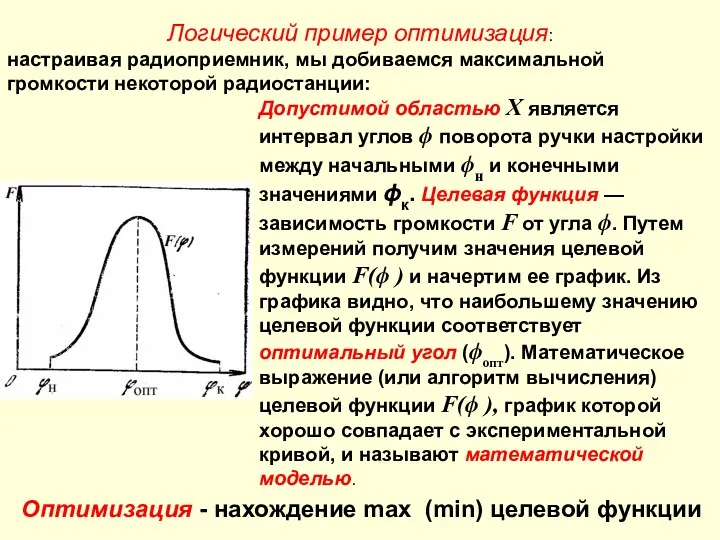
Допустимой областью Х является интервал углов ϕ поворота ручки настройки между
Допустимой областью Х является интервал углов ϕ поворота ручки настройки между
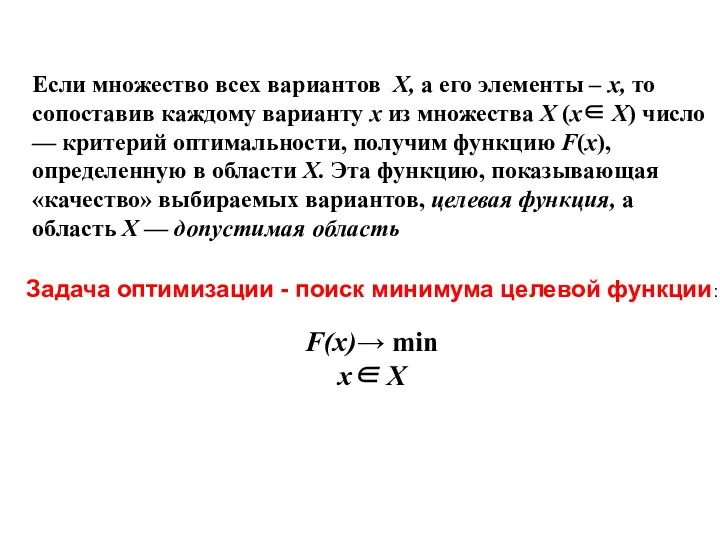
Задача оптимизации - поиск минимума целевой функции:
F(x)→ min
x∈ Х
Если множество
Задача оптимизации - поиск минимума целевой функции:
F(x)→ min
x∈ Х
Если множество
Для решения задач оптимизации необходимо:
А) Составить математическую модель объекта оптимизации
Б) Выбрать
Для решения задач оптимизации необходимо:
А) Составить математическую модель объекта оптимизации
Б) Выбрать
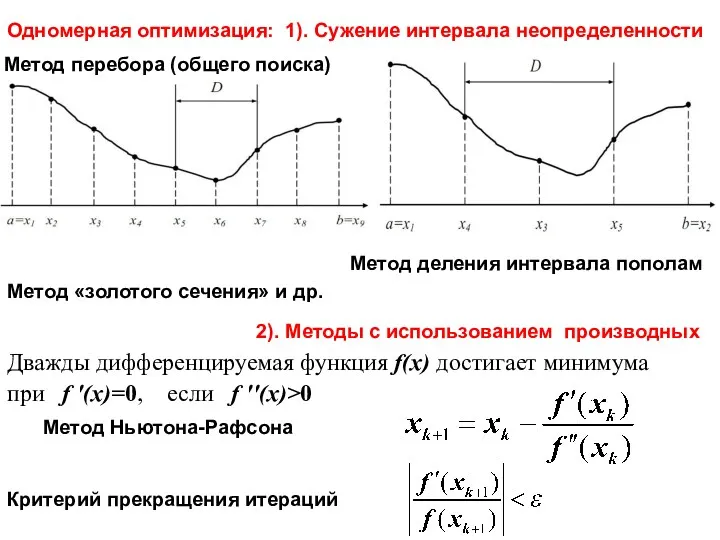
Метод деления интервала пополам
Метод перебора (общего поиска)
Одномерная оптимизация: 1). Сужение интервала
Метод деления интервала пополам
Метод перебора (общего поиска)
Одномерная оптимизация: 1). Сужение интервала

Рельеф функции F(x,y)=10(y-sin x)2+0.1x2
А
Б
Рельеф значений F(x,y): А- котловинный, Б – овражный,
нанесены
Рельеф функции F(x,y)=10(y-sin x)2+0.1x2
А
Б
Рельеф значений F(x,y): А- котловинный, Б – овражный,
нанесены
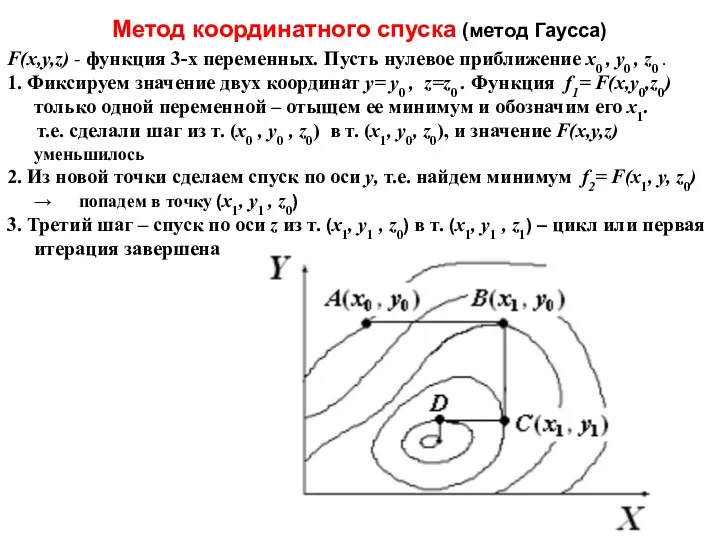
Метод координатного спуска (метод Гаусса)
F(x,y,z) - функция 3-х переменных. Пусть нулевое
Метод координатного спуска (метод Гаусса)
F(x,y,z) - функция 3-х переменных. Пусть нулевое

Метод оврагов
Метод оврагов
![ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ [Канторович, 1939] 1. Задача об использовании сырья Если](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/319547/slide-11.jpg)
ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ [Канторович, 1939]
1. Задача об использовании сырья
Если предприятие выпускает
ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ [Канторович, 1939]
1. Задача об использовании сырья
Если предприятие выпускает
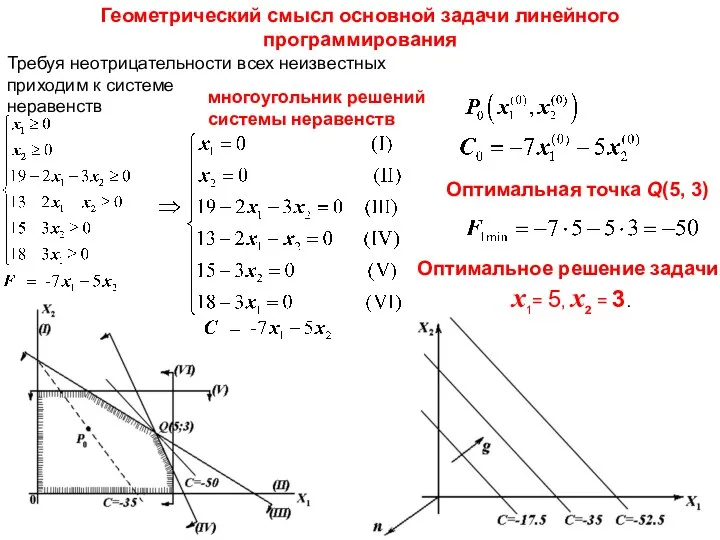
Геометрический смысл основной задачи линейного программирования
Требуя неотрицательности всех неизвестных
приходим
Геометрический смысл основной задачи линейного программирования
Требуя неотрицательности всех неизвестных
приходим
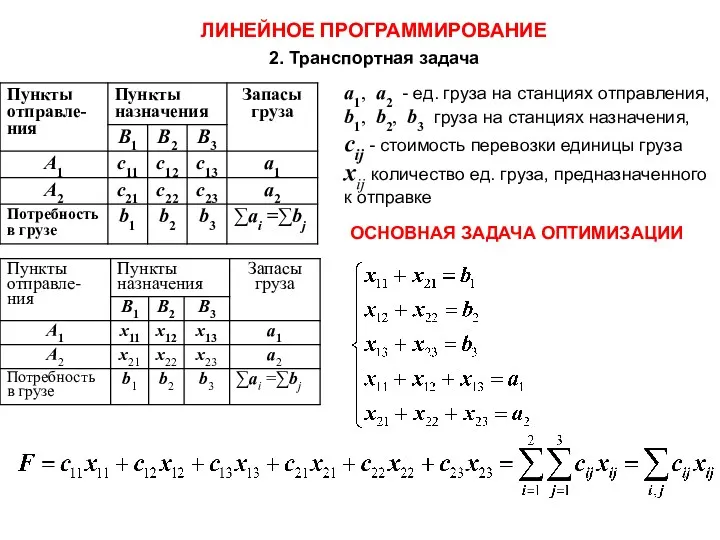
ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
2. Транспортная задача
а1, a2 - ед. груза на станциях отправления,
b1,
ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
2. Транспортная задача
а1, a2 - ед. груза на станциях отправления,
b1,
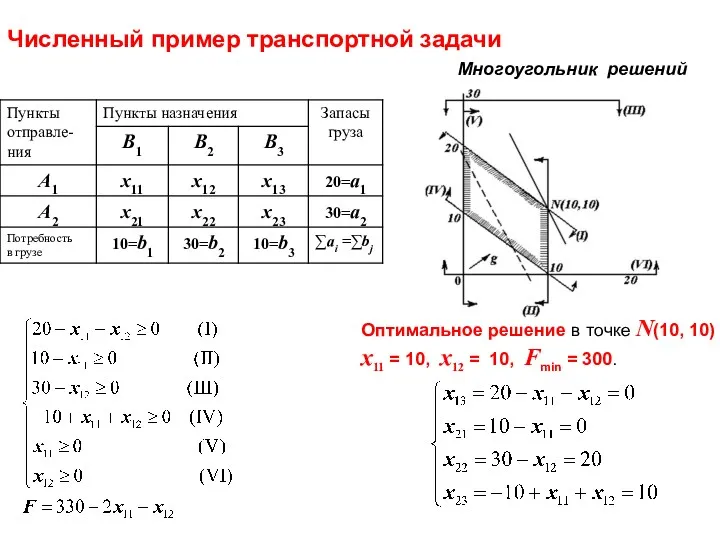
Многоугольник решений
Оптимальное решение в точке N(10, 10) x11 = 10,
Многоугольник решений
Оптимальное решение в точке N(10, 10) x11 = 10,
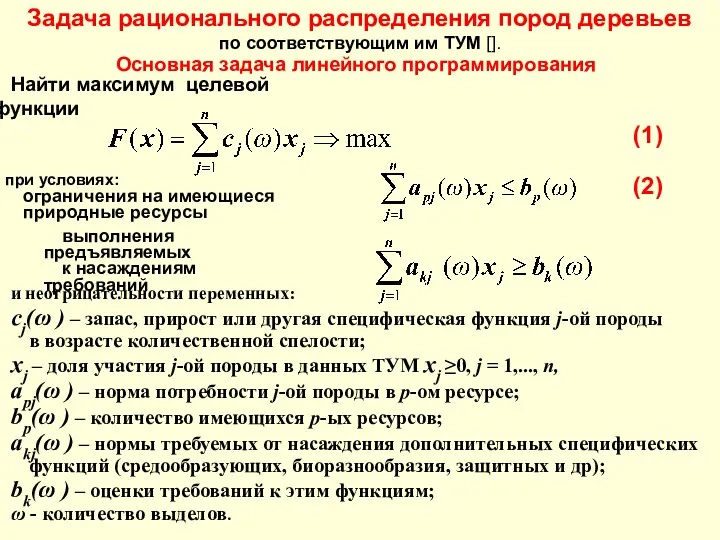
Найти максимум целевой функции
при условиях:
ограничения на имеющиеся
природные ресурсы
выполнения предъявляемых
к
Найти максимум целевой функции
при условиях:
ограничения на имеющиеся
природные ресурсы
выполнения предъявляемых
к
![Географические ограничения по ресурсам в задачах оптимизации продукционных процессов [Нестеров, Бредихин, 1970 ]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/319547/slide-16.jpg)
Географические ограничения по ресурсам в задачах оптимизации продукционных процессов
[Нестеров,
Географические ограничения по ресурсам в задачах оптимизации продукционных процессов
[Нестеров,
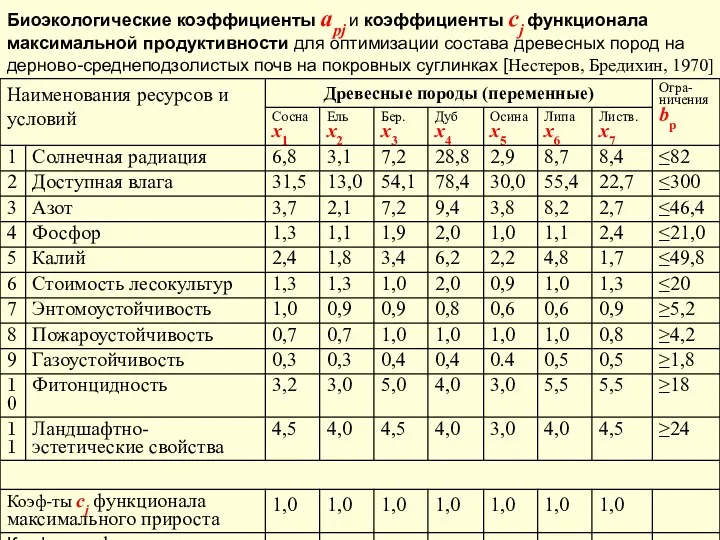
Биоэкологические коэффициенты apj и коэффициенты сj функционала максимальной продуктивности для оптимизации
Биоэкологические коэффициенты apj и коэффициенты сj функционала максимальной продуктивности для оптимизации
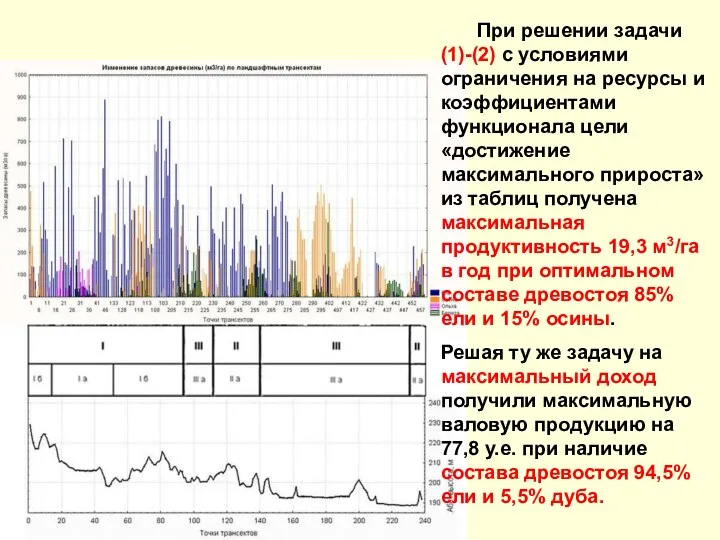
При решении задачи (1)-(2) с условиями ограничения на ресурсы и коэффициентами
При решении задачи (1)-(2) с условиями ограничения на ресурсы и коэффициентами
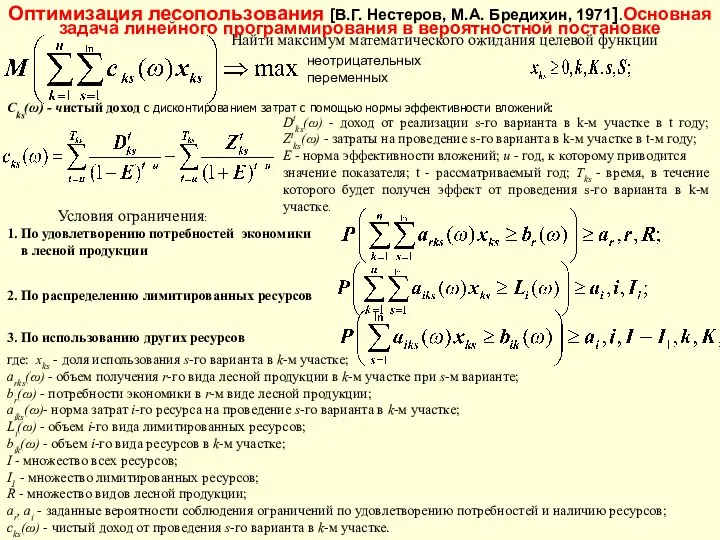
Найти максимум математического ожидания целевой функции
Условия ограничения:
1. По
Найти максимум математического ожидания целевой функции
Условия ограничения:
1. По
Система, точнее - динамическая система (которая развивается, эволюционирует во времени)
Система, точнее - динамическая система (которая развивается, эволюционирует во времени)
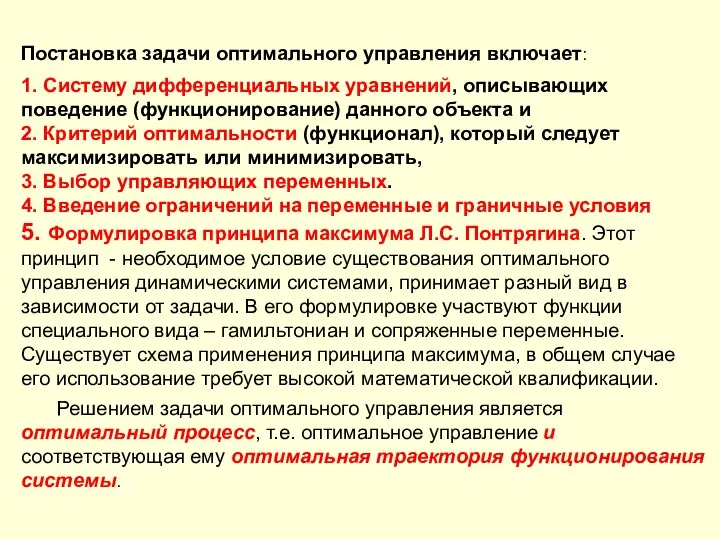
Постановка задачи оптимального управления включает:
1. Систему дифференциальных уравнений, описывающих поведение
Постановка задачи оптимального управления включает:
1. Систему дифференциальных уравнений, описывающих поведение
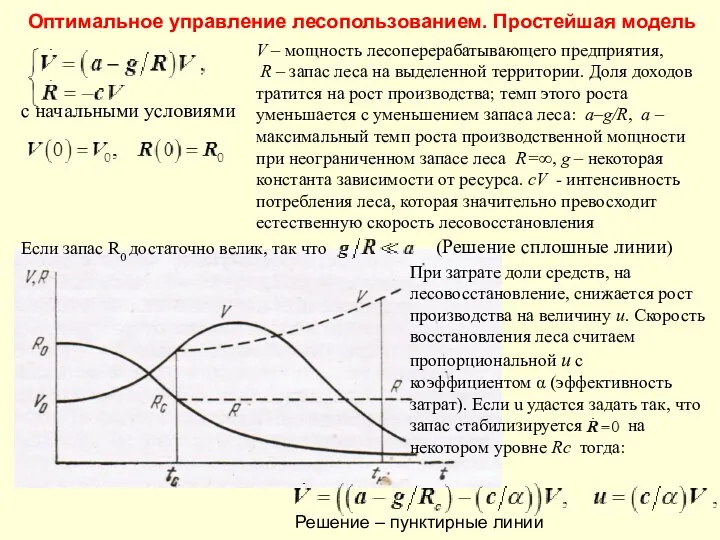
с начальными условиями
V – мощность лесоперерабатывающего предприятия,
R – запас леса
с начальными условиями
V – мощность лесоперерабатывающего предприятия,
R – запас леса
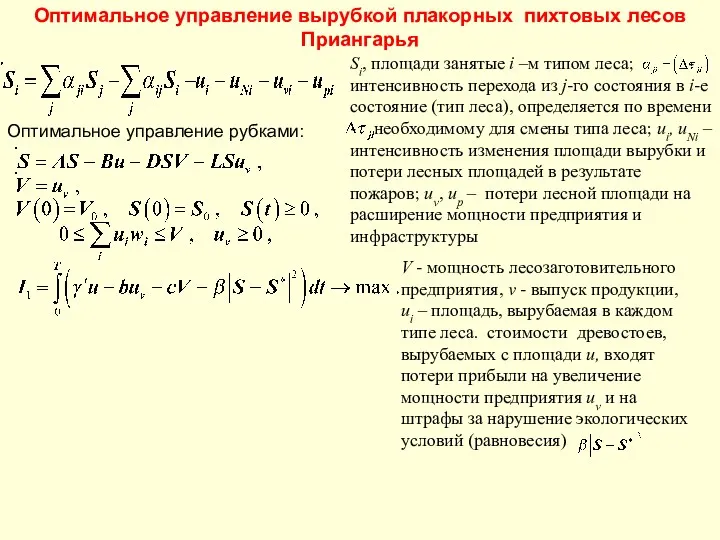
Оптимальное управление вырубкой плакорных пихтовых лесов Приангарья
Si, площади занятые i –м
Оптимальное управление вырубкой плакорных пихтовых лесов Приангарья
Si, площади занятые i –м
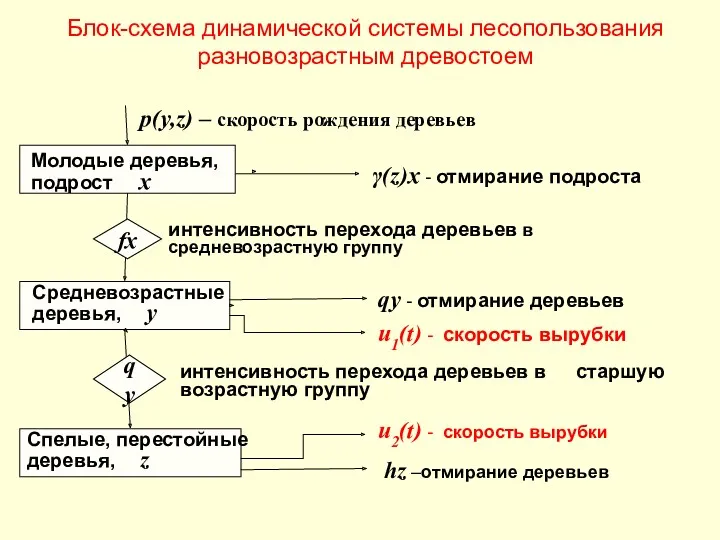
Блок-схема динамической системы лесопользования
разновозрастным древостоем
Средневозрастные
деревья, y
Спелые, перестойные
деревья, z
Молодые деревья,
подрост x
p(y,z) – скорость
Блок-схема динамической системы лесопользования
разновозрастным древостоем
Средневозрастные
деревья, y
Спелые, перестойные
деревья, z
Молодые деревья,
подрост x
p(y,z) – скорость
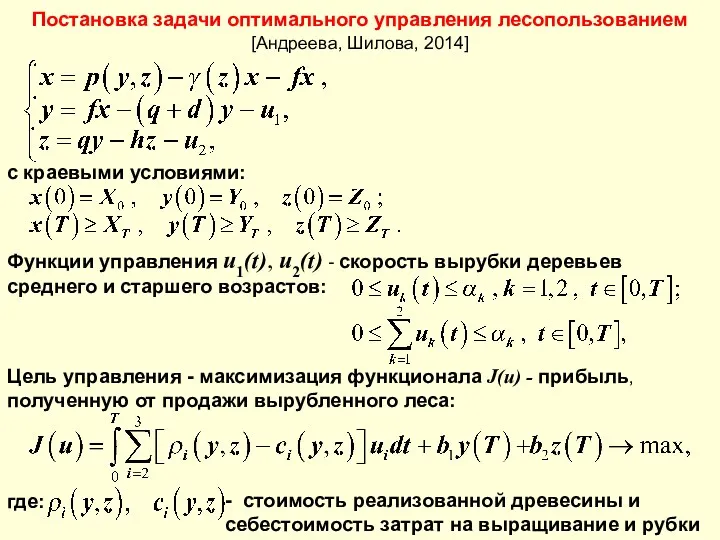
с краевыми условиями:
Функции управления u1(t), u2(t) - скорость вырубки деревьев
с краевыми условиями:
Функции управления u1(t), u2(t) - скорость вырубки деревьев
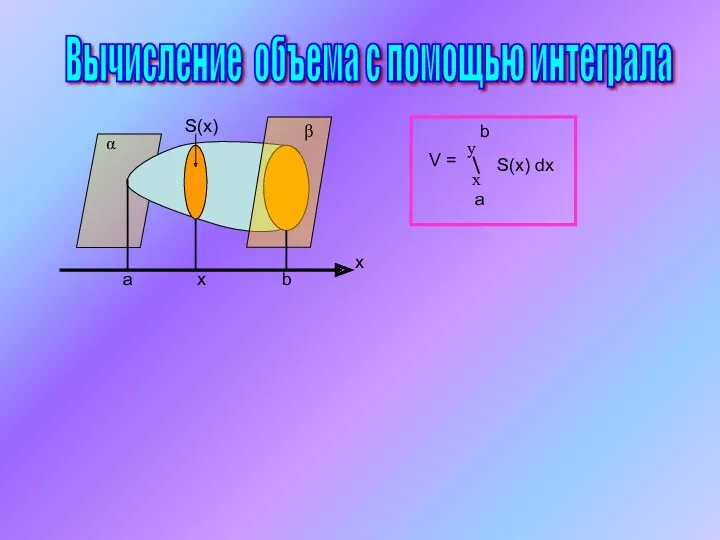 Вычисление объёма с помощью интеграла
Вычисление объёма с помощью интеграла Числовые промежутки. Геометрическая и аналитическая модели числового промежутка
Числовые промежутки. Геометрическая и аналитическая модели числового промежутка Замечательные пределы
Замечательные пределы Конкурс Любишь ли ты математику и знаешь ли ты её?
Конкурс Любишь ли ты математику и знаешь ли ты её? К 105-летию А.Линдгрен - Урок математики в 3 классе Деление двузначного числа на однозначное
К 105-летию А.Линдгрен - Урок математики в 3 классе Деление двузначного числа на однозначное Состав чисел в пределах 10. Закрепление
Состав чисел в пределах 10. Закрепление Эйлеровы графы. Пути и циклы Эйлера
Эйлеровы графы. Пути и циклы Эйлера Деление суммы на число
Деление суммы на число История развития геометрии
История развития геометрии Угол. Прямой и развёрнутый угол. Чертёжный треугольник
Угол. Прямой и развёрнутый угол. Чертёжный треугольник Метрологическое обеспечение сертификации. (Лекция 1)
Метрологическое обеспечение сертификации. (Лекция 1) Розв’язання лінійних рівнянь та систем лінійних рівнянь в пакеті Matlab
Розв’язання лінійних рівнянь та систем лінійних рівнянь в пакеті Matlab Пропорции. Задание для устного счета. Упражнение 17. 6 класс
Пропорции. Задание для устного счета. Упражнение 17. 6 класс Масштаб
Масштаб Олимпиада национальной технологической инициативы. Технологии беспроводной связи. Информатика. Математика
Олимпиада национальной технологической инициативы. Технологии беспроводной связи. Информатика. Математика презентация к уроку Умножение на трехзначное число со всеми значащими цифрами
презентация к уроку Умножение на трехзначное число со всеми значащими цифрами Мы - строители. Обучающая игра-тренажёр Часть 2
Мы - строители. Обучающая игра-тренажёр Часть 2 Приближённое вычисление определённого интеграла по формулам прямоугольников и трапеций. Оценка погрешности вычислений
Приближённое вычисление определённого интеграла по формулам прямоугольников и трапеций. Оценка погрешности вычислений Открытый урок математики
Открытый урок математики Презентация по математике Весёлое путешествие 1 класс
Презентация по математике Весёлое путешествие 1 класс Равносильность уравнений. Логарифмические уравнения
Равносильность уравнений. Логарифмические уравнения Математический калейдоскоп. Внеклассное мероприятие. 5 класс
Математический калейдоскоп. Внеклассное мероприятие. 5 класс Правильные и неправильные дроби. Понятия
Правильные и неправильные дроби. Понятия Главные направления линии второго порядка
Главные направления линии второго порядка Угол. Виды углов
Угол. Виды углов Описательная статистика. 7 класс
Описательная статистика. 7 класс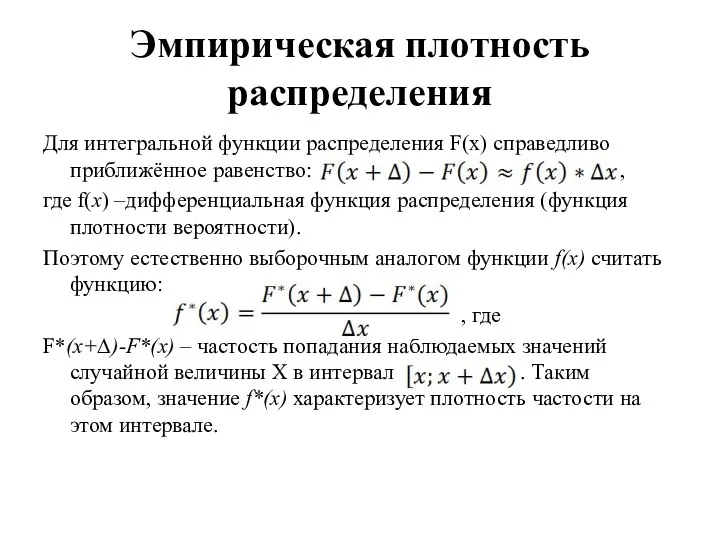 Эмпирическая плотность распределения
Эмпирическая плотность распределения Подготовительный этап к изучению нумерации чисел первого десятка
Подготовительный этап к изучению нумерации чисел первого десятка