- Основные понятия теории графов. Тема 3

Содержание
- 2. Лекция ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ГРАФОВ
- 3. 1 Понятие о графах и теории графов
- 4. Совокупность множества М с заданным на нем бинарным отношением называется графом G= , где М –
- 5. Пример графа «звезда» М={1,2,3,4,5}, Т={(1,3),(1,4),(2,4),(2,5),(3,1), (3,5),(4,2),(4,1),(5,3),(5,2}).
- 6. Линии, изображающие ребра, могут пересекаться на изображении графа, но точки их пересечений не являются вершинами.
- 7. Между элементами двух множеств М и Т определено отношение инцидентности, т.е. связи между двумя элементами множества
- 8. Другие примеры графов: отношения дружбы на множестве людей, отношения родства, карты дорог местности, электрические схемы соединений
- 9. Теория графов Раздел дискретной математики, изучающий свойства графов. Теория графов содержит большое количество нерешённых проблем и
- 10. Родоначальником теории графов считается Леонард Эйлер. В 1736 - задача о кёнигсбергских мостах
- 12. Теорию графов начали разрабатывать для решения некоторых задач о геометрических конфигурациях, состоящих из точек и линий.
- 13. В этих задачах несущественно, соединены ли точки конфигурации отрезками прямых или они криволинейны, какова длина линий
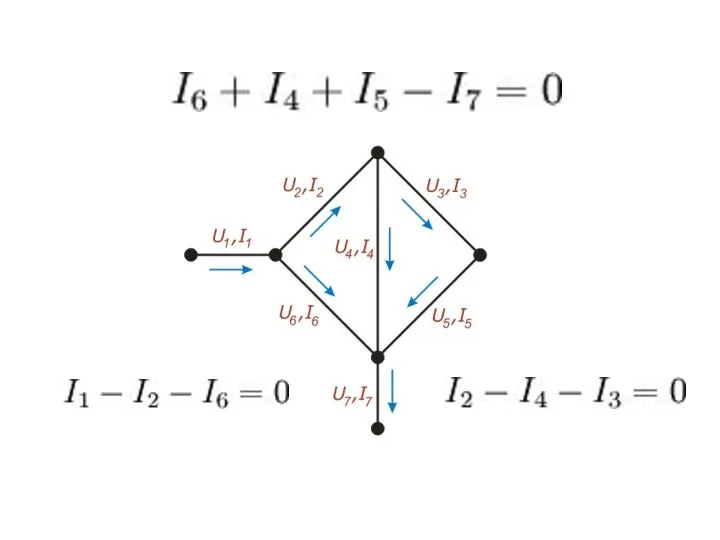
- 14. Первые серьезные результаты теории графов связаны с решением задач построения электрических цепей (Г. Кирхгоф)
- 15. Г. Кирхгоф (1824-1887 гг.) – Законы Кирхгофа
- 17. Подсчет числа химических соединений с различными типами молекулярных связей (А. Кэли).
- 18. Arthur Cayley; (1821 - 1895) — английский математик.
- 19. КУРАТОВСКИЙ (Kuratowski) Казимеж (1896-1980), польский математик, иностранный член АН СССР (1966). Труды по топологии, теории функций,
- 20. Уильям Роуэн Гамильтон Уильям Роуэн Гамильтон (William Rowan Hamilton; 1806 —1865) — выдающийся ирландский математик. Гамильтонов
- 21. Терминология теории графов Терминология теории графов поныне не определена строго. Иногда граф называют "сетью", но мы
- 22. Теория графов и кибернетика В 30-е годы ХХ века благодаря трудам Д. Кенига теория графов стала
- 23. Термин «граф» (от латинского слова «графио» - пишу) приобрел права гражданства и вошел в математический язык
- 24. Графы применяют при анализе функционирования систем. С отдельными компонентами изучаемой системы удобно связывать вершины графа, а
- 25. Теория графов находит применение, например, в геоинформационных системах (ГИС). Существующие или вновь проектируемые дома, сооружения, кварталы
- 26. Графы используются в поисковых системах (Google) Теория графов используется в химии (для описания структур, путей сложных
- 27. 2.Основные виды графов В некоторых задачах существенно направление ребер графа. Направленные ребра называют дугами, а содержащий
- 28. Ориентированный граф -орграф
- 29. Множество ребер может быть пусто. Если же множество вершин пусто, то пусто и множество ребер. Такой
- 30. Различные ребра могут быть инцидентны одной и той же паре вершин, в этом случае они называются
- 31. Ребро (дуга) может соединять некоторую вершину саму с собой, такое ребро (дуга) называется петлей.
- 32. Граф называется нагруженным, если каждому ребру (дуге) поставлено в соответствие некоторое действительное число (длина дуги, вес
- 33. Полный граф: все вершины соединены друг с другом. Это квадрат множества М. Петли необязательны.
- 34. Граф называется плоским (планарным), если он может быть изображен на плоскости так, что все пересечения ребер
- 35. Псевдограф содержит и ребра, и дуги. Тривиальный граф содержит только одну вершину.
- 36. Двудольный граф (биграф, чётный граф) – граф, который может быть представлен двумя непересекающимися подмножествами вершин, причем
- 37. Представление бинарных отношений
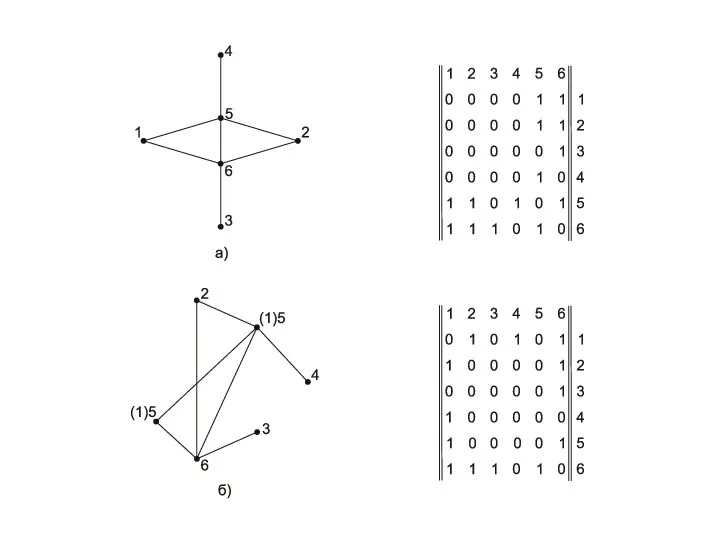
- 38. 3. Задание графов Граф можно задать так называемой матрицей смежности В, каждой i-ой строке (j-му столбцу)
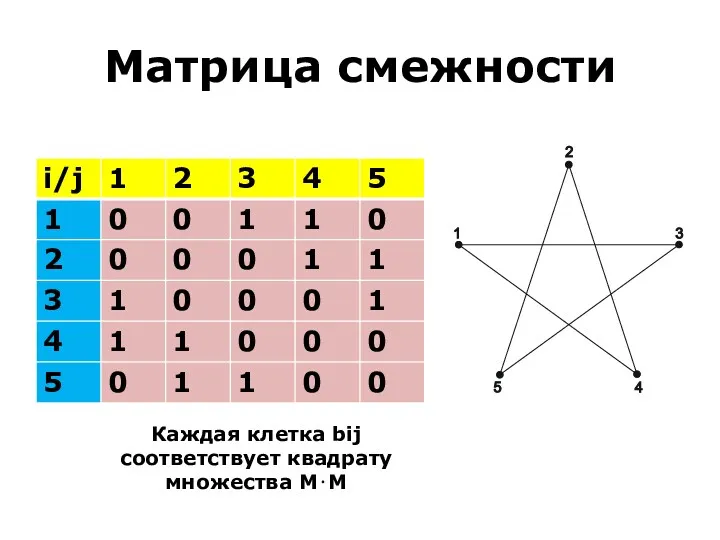
- 39. Матрица смежности Каждая клетка bij соответствует квадрату множества М⋅М
- 40. Задание орграфа
- 41. В описанном виде матрицы инцидентности применимы только к графам без петель, в случае наличия которых матрицу
- 42. Граф может быть задан списочной структурой: списками смежности и массивами рёбер (дуг).
- 43. 4. Характеристики графов Маршруты, цепи, пути, циклы и контуры
- 44. Маршрут – чередующаяся последовательность вершин и ребер, в которой два соседних элемента инцидентны. Если начальная вершина
- 45. Если все вершины (а, значит и ребра) различны, то маршрут называется простой цепью. Замкнутая цепь –
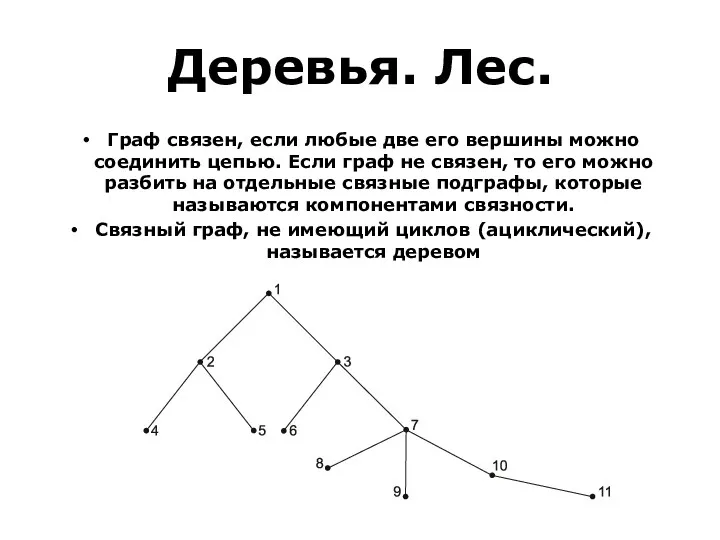
- 46. Деревья. Лес. Граф связен, если любые две его вершины можно соединить цепью. Если граф не связен,
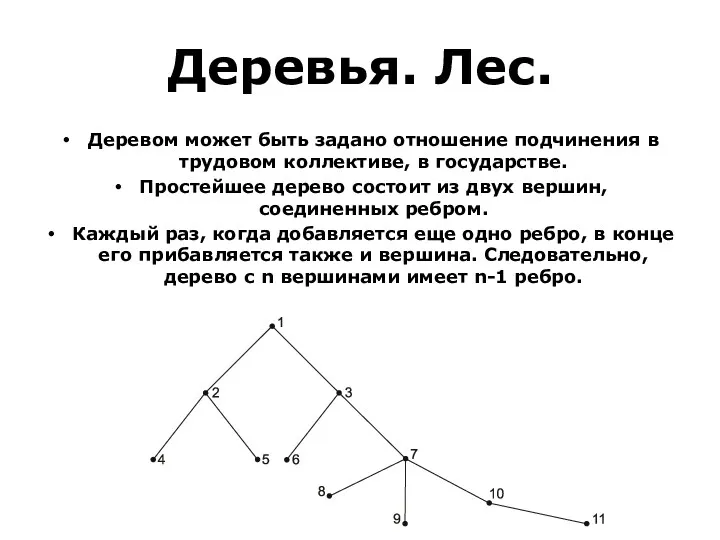
- 47. Деревья. Лес. Деревом может быть задано отношение подчинения в трудовом коллективе, в государстве. Простейшее дерево состоит
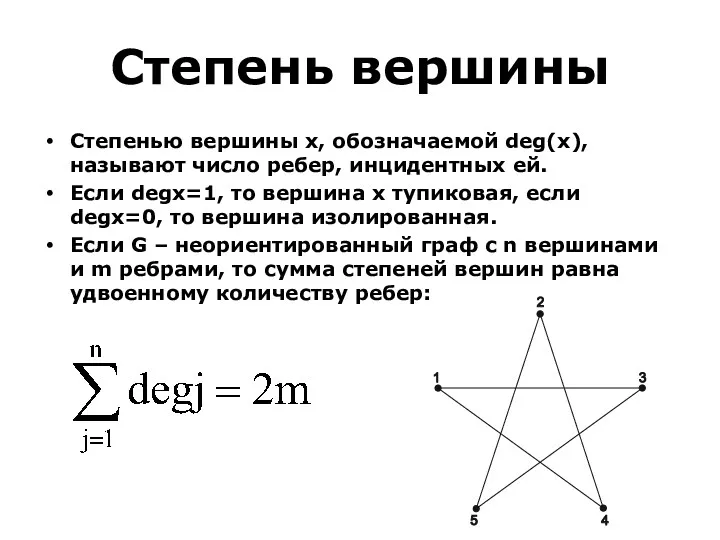
- 48. Степень вершины Степенью вершины х, обозначаемой deg(х), называют число ребер, инцидентных ей. Если degх=1, то вершина
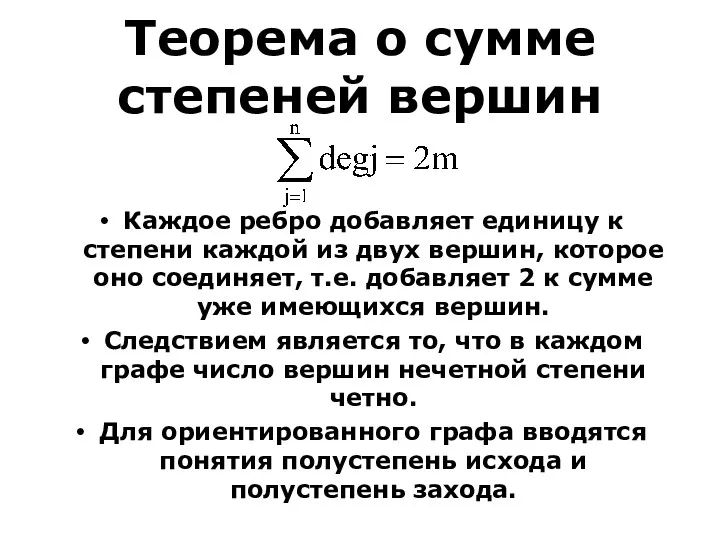
- 49. Теорема о сумме степеней вершин Каждое ребро добавляет единицу к степени каждой из двух вершин, которое
- 50. Подграф Подграфом GΩ графа G= называется граф, в который входит лишь часть вершин графа G, образующих
- 51. Частичный граф Частичным графом GΔ по отношению к графу G называется граф, содержащий только часть ребер
- 52. Если две вершины соединены ребром, то говорят, что каждая вершина инцидентна этому ребру, а соответствующие вершины
- 53. Если две вершины соединены ребром, то говорят, что каждая вершина инцидентна этому ребру, а соответствующие вершины
- 54. Если две вершины соединены ребром, то говорят, что каждая вершина инцидентна этому ребру, а соответствующие вершины
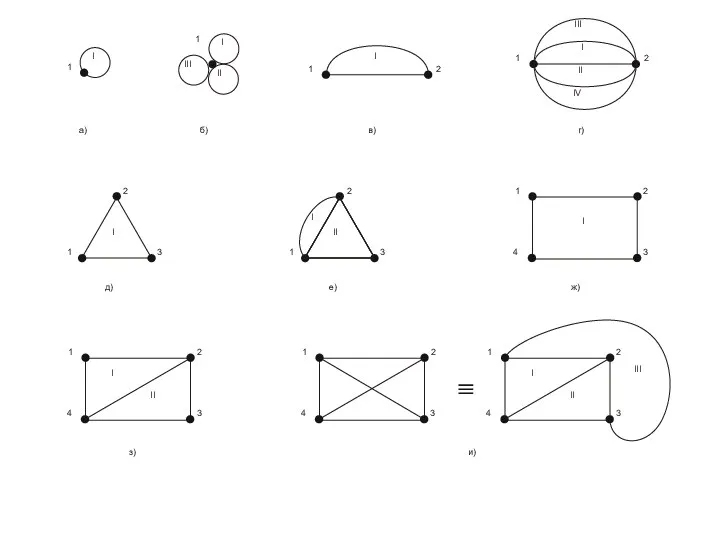
- 55. Цикломатическое число. Пусть G – неориентированный связный граф, имеющий n вершин и m ребер. Цикломатическим числом
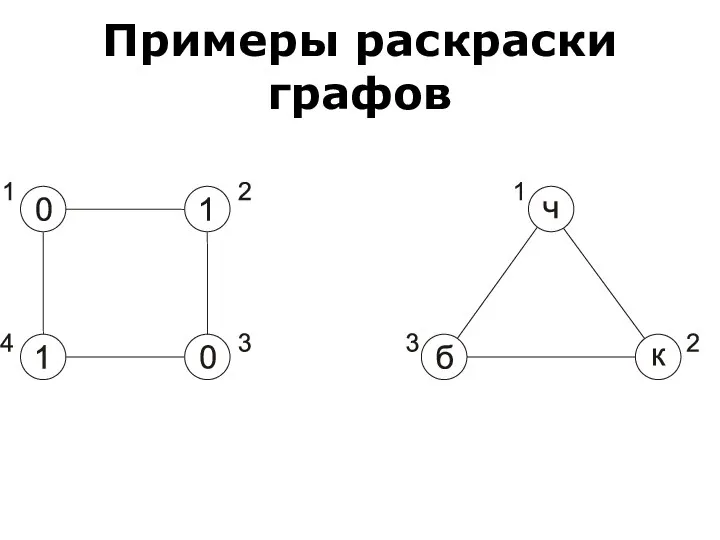
- 57. Хроматическое число графа. Граф G называют р - хроматическим, где р – натуральное число, если его
- 58. Наименьшее число р, при котором граф является р-хроматическим, называют хроматическим числом графа и обозначают λ(G). Если
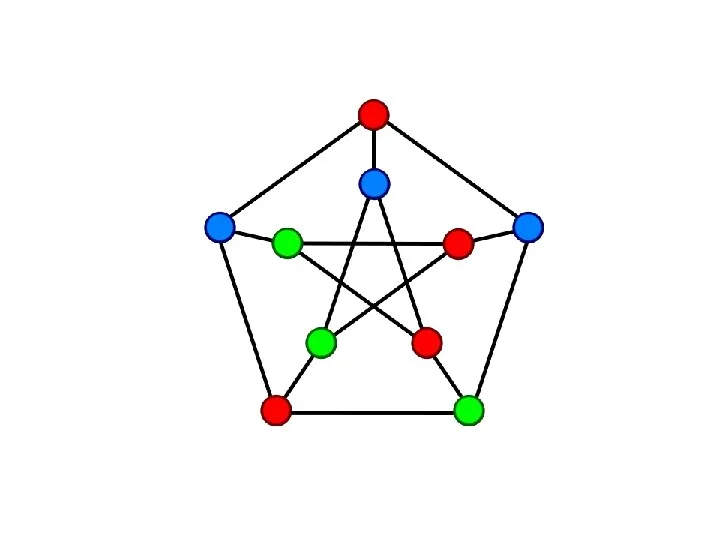
- 59. Примеры раскраски графов
- 61. Френсис Гутри, студент де Моргана, в 1852 году: можно ли всякую расположенную на сфере карту раскрасить
- 62. Проблема четырёх красок — математическая задача, предложенная Гутри (англ.) в 1852 году.
- 63. К. Аппель и В. Хакен доказали в 1976 г. С помощью ЭВМ, что так можно раскрасить
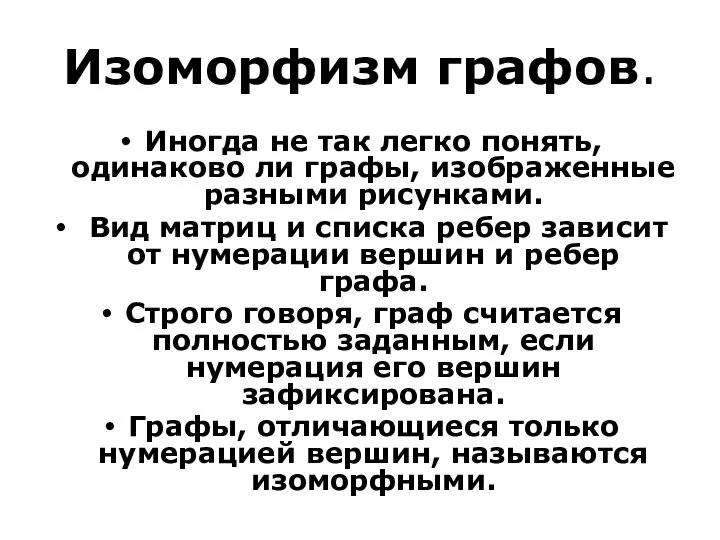
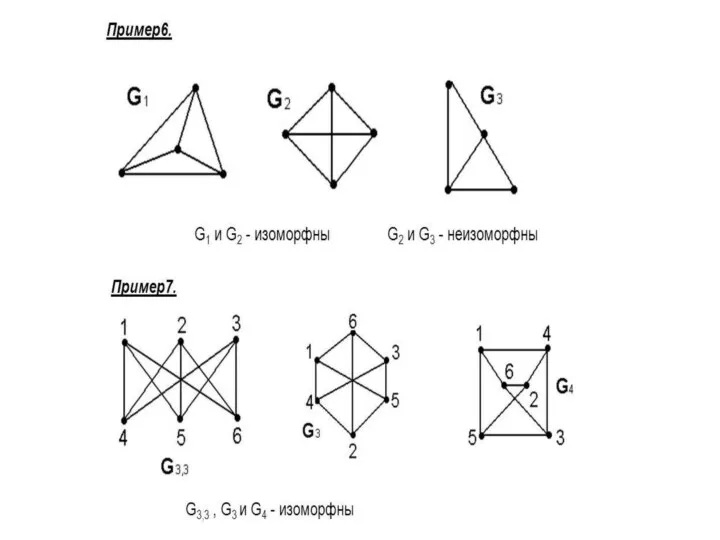
- 64. Изоморфизм графов. Иногда не так легко понять, одинаково ли графы, изображенные разными рисунками. Вид матриц и
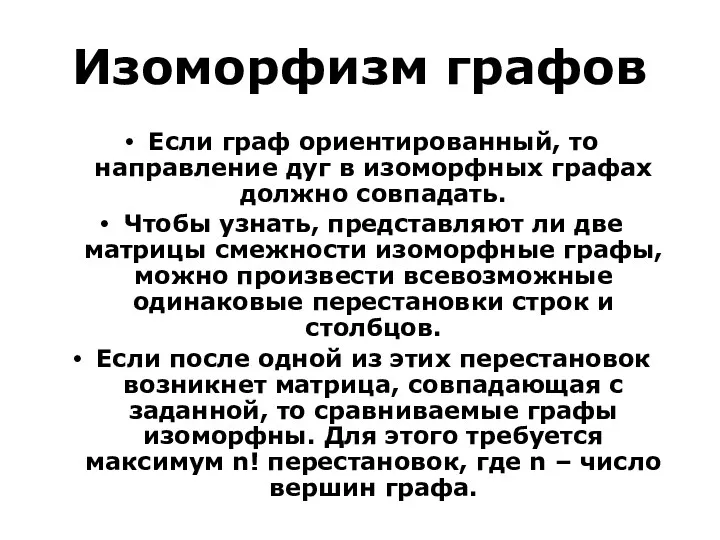
- 67. Изоморфизм графов Если граф ориентированный, то направление дуг в изоморфных графах должно совпадать. Чтобы узнать, представляют
- 68. Иногда для определения изоморфности определяют параметры обоих графов: число вершин, число ребер, число компонент связности, последовательность
- 69. Два не изоморфных графа, у которых эти параметры совпадают
- 70. Понятие об операциях над графами. Полный граф – это граф, в котором все вершины связаны друг
- 71. Понятие об операциях над графами. Вводятся также операции объединения графов, когда объединяются множества вершин и заданных
- 72. Сети Петри Сети Петри — математический аппарат для моделирования динамических дискретных систем. Впервые описаны Карлом Петри
- 73. Сеть Петри представляет собой двудольный ориентированный граф, состоящий из вершин двух типов — позиций и переходов,
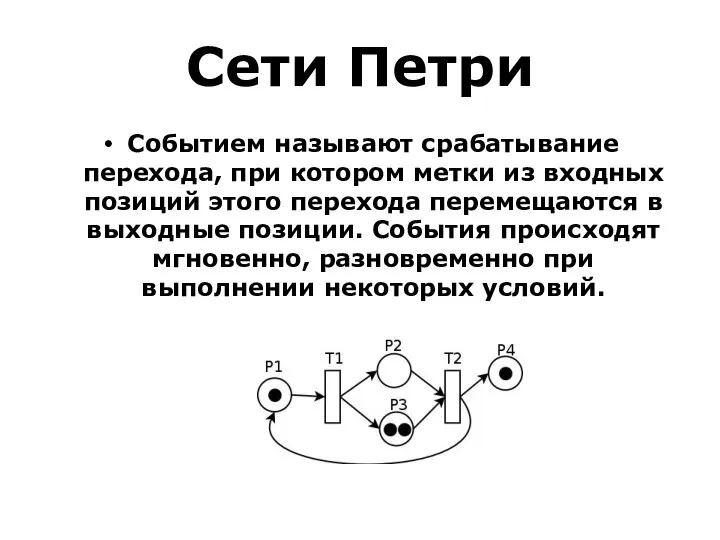
- 74. Сети Петри Событием называют срабатывание перехода, при котором метки из входных позиций этого перехода перемещаются в
- 75. Основными свойствами сети Петри являются: Ограниченность — число меток в любой позиции сети не может превысить
- 76. Некоторые виды сетей Петри: Временная сеть Петри — переходы обладают весом, определяющим продолжительность срабатывания (задержку). Стохастическая
- 77. Некоторые виды сетей Петри: Цветная сеть Петри — метки могут быть различных типов, обозначаемых цветами, тип
- 78. Множество устойчивости Множеством внутренней устойчивости графа называется подмножество таких его вершин, которые несмежны между собой. Множеством
- 80. Скачать презентацию
Лекция
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ГРАФОВ
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ГРАФОВ
1 Понятие о графах и теории графов
1 Понятие о графах и теории графов
Совокупность множества М с заданным на нем бинарным отношением называется графом
Совокупность множества М с заданным на нем бинарным отношением называется графом
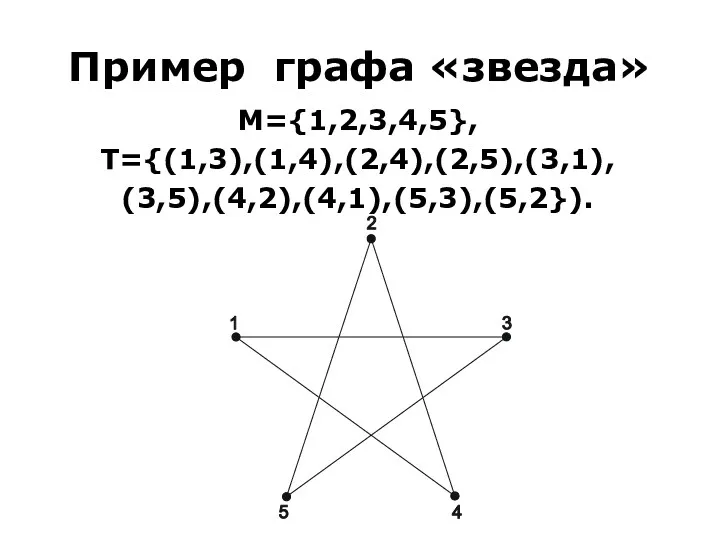
Пример графа «звезда»
М={1,2,3,4,5},
Т={(1,3),(1,4),(2,4),(2,5),(3,1),
(3,5),(4,2),(4,1),(5,3),(5,2}).
Пример графа «звезда»
М={1,2,3,4,5},
Т={(1,3),(1,4),(2,4),(2,5),(3,1),
(3,5),(4,2),(4,1),(5,3),(5,2}).
Линии, изображающие ребра, могут пересекаться на изображении графа, но точки их
Между элементами двух множеств М и Т определено отношение инцидентности, т.е.
Между элементами двух множеств М и Т определено отношение инцидентности, т.е.
Другие примеры графов: отношения дружбы на множестве людей, отношения родства, карты
Другие примеры графов: отношения дружбы на множестве людей, отношения родства, карты
Теория графов
Раздел дискретной математики, изучающий свойства графов.
Теория графов содержит большое количество
Теория графов
Раздел дискретной математики, изучающий свойства графов.
Теория графов содержит большое количество
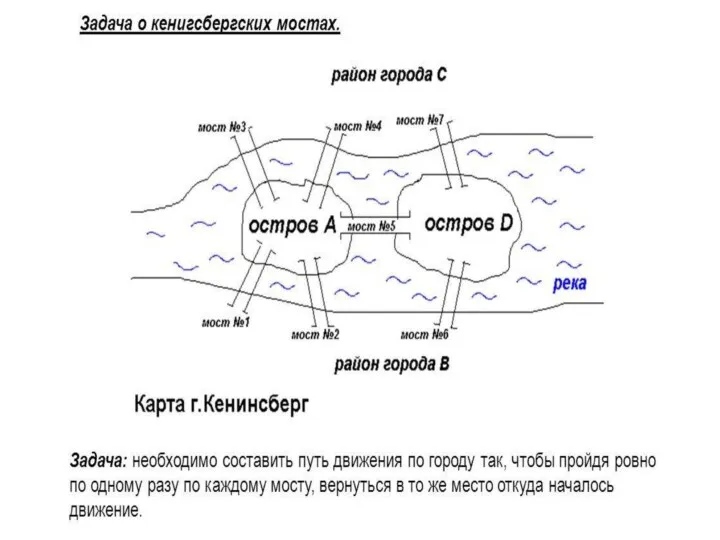
Родоначальником теории графов считается Леонард Эйлер.
В 1736 - задача о
Родоначальником теории графов считается Леонард Эйлер.
В 1736 - задача о
Теорию графов начали разрабатывать для решения некоторых задач о геометрических конфигурациях,
Теорию графов начали разрабатывать для решения некоторых задач о геометрических конфигурациях,
В этих задачах несущественно, соединены ли точки конфигурации отрезками прямых или
В этих задачах несущественно, соединены ли точки конфигурации отрезками прямых или
Первые серьезные результаты теории графов связаны с решением задач построения электрических
Первые серьезные результаты теории графов связаны с решением задач построения электрических
Г. Кирхгоф (1824-1887 гг.) – Законы Кирхгофа
Г. Кирхгоф (1824-1887 гг.) – Законы Кирхгофа
Подсчет числа химических соединений с различными типами молекулярных связей (А. Кэли).
Arthur Cayley; (1821 - 1895) — английский математик.
Arthur Cayley; (1821 - 1895) — английский математик.
КУРАТОВСКИЙ (Kuratowski) Казимеж (1896-1980), польский математик, иностранный член АН СССР (1966).
КУРАТОВСКИЙ (Kuratowski) Казимеж (1896-1980), польский математик, иностранный член АН СССР (1966).
Уильям Роуэн Гамильтон
Уильям Роуэн Гамильтон (William Rowan Hamilton; 1806 —1865) — выдающийся ирландский
Уильям Роуэн Гамильтон
Уильям Роуэн Гамильтон (William Rowan Hamilton; 1806 —1865) — выдающийся ирландский
Терминология теории графов
Терминология теории графов поныне не определена строго.
Иногда граф
Терминология теории графов
Терминология теории графов поныне не определена строго.
Иногда граф
Теория графов и кибернетика
В 30-е годы ХХ века благодаря трудам Д.
Теория графов и кибернетика
В 30-е годы ХХ века благодаря трудам Д.
Термин «граф» (от латинского слова «графио» - пишу) приобрел права гражданства
Термин «граф» (от латинского слова «графио» - пишу) приобрел права гражданства
Графы применяют при анализе функционирования систем.
С отдельными компонентами изучаемой системы
Графы применяют при анализе функционирования систем.
С отдельными компонентами изучаемой системы
Теория графов находит применение, например, в геоинформационных системах (ГИС).
Существующие или
Теория графов находит применение, например, в геоинформационных системах (ГИС).
Существующие или
Графы используются в поисковых системах (Google)
Теория графов используется в химии
Графы используются в поисковых системах (Google)
Теория графов используется в химии
2.Основные виды графов
В некоторых задачах существенно направление ребер графа.
Направленные ребра
2.Основные виды графов
В некоторых задачах существенно направление ребер графа.
Направленные ребра
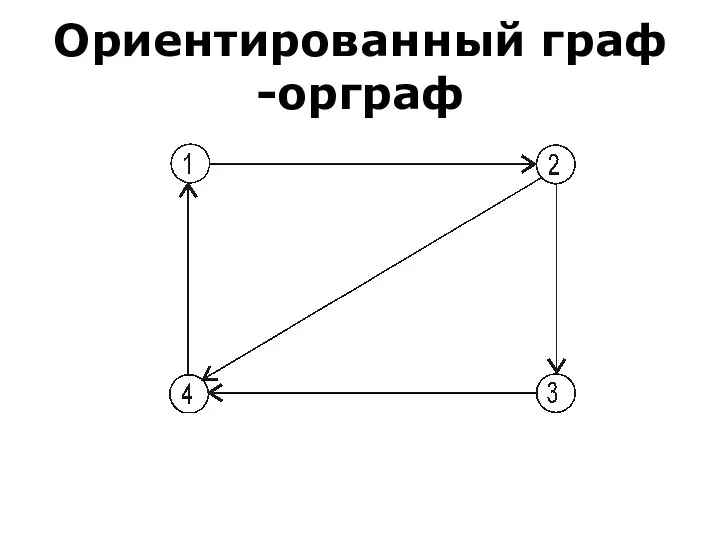
Ориентированный граф -орграф
Ориентированный граф -орграф
Множество ребер может быть пусто.
Если же множество вершин пусто, то
Если же множество вершин пусто, то
Различные ребра могут быть инцидентны одной и той же паре вершин,
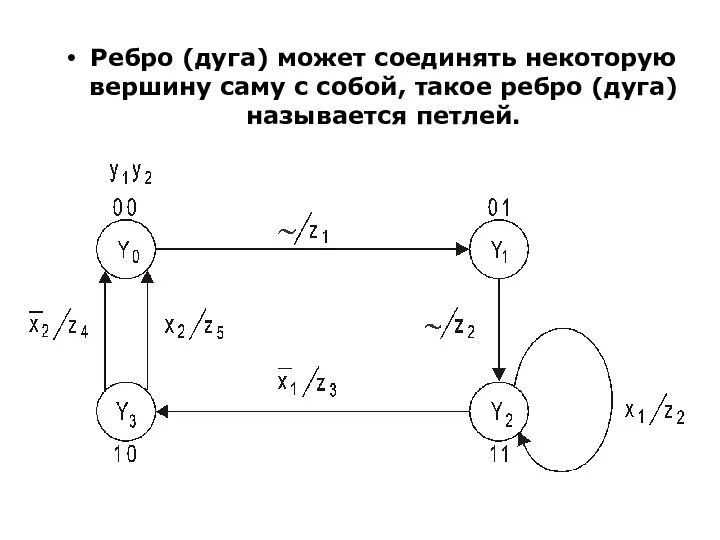
Ребро (дуга) может соединять некоторую вершину саму с собой, такое ребро
Ребро (дуга) может соединять некоторую вершину саму с собой, такое ребро
Граф называется нагруженным, если каждому ребру (дуге) поставлено в соответствие некоторое
Граф называется нагруженным, если каждому ребру (дуге) поставлено в соответствие некоторое
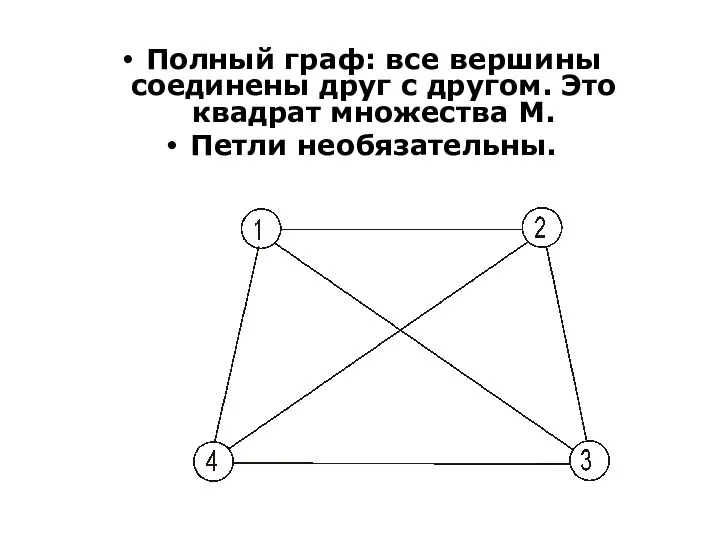
Полный граф: все вершины соединены друг с другом. Это квадрат множества
Полный граф: все вершины соединены друг с другом. Это квадрат множества
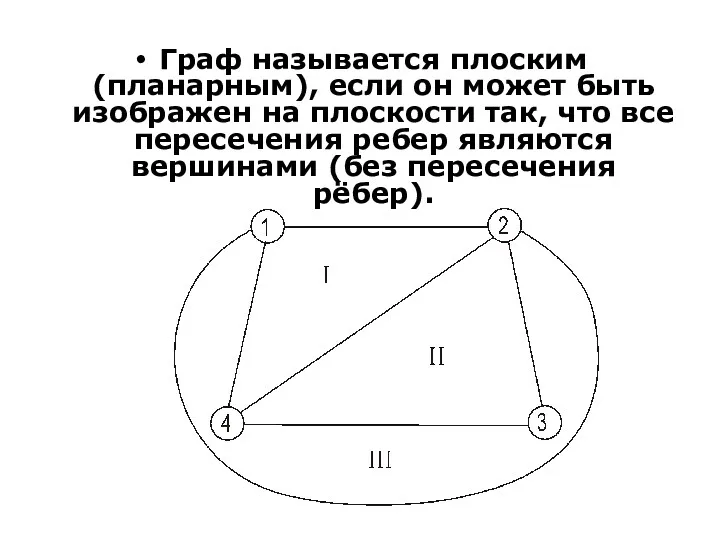
Граф называется плоским (планарным), если он может быть изображен на плоскости
Граф называется плоским (планарным), если он может быть изображен на плоскости
Псевдограф содержит и ребра, и дуги.
Тривиальный граф содержит только одну вершину.
Псевдограф содержит и ребра, и дуги.
Тривиальный граф содержит только одну вершину.
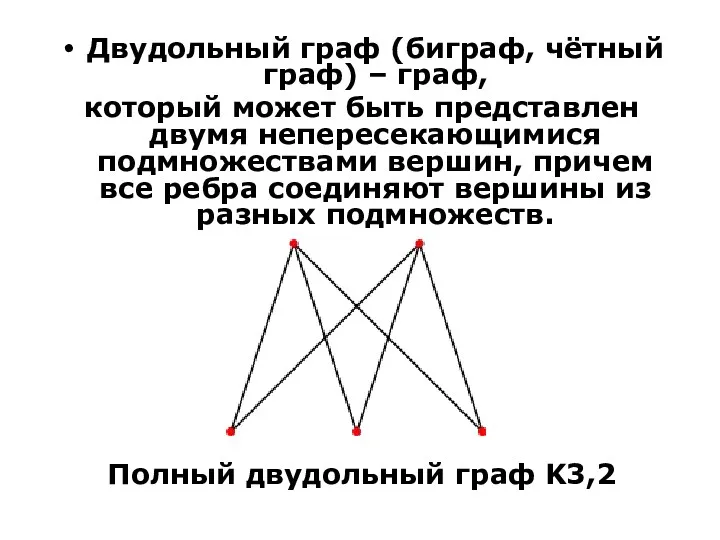
Двудольный граф (биграф, чётный граф) – граф,
который может быть представлен
Двудольный граф (биграф, чётный граф) – граф,
который может быть представлен
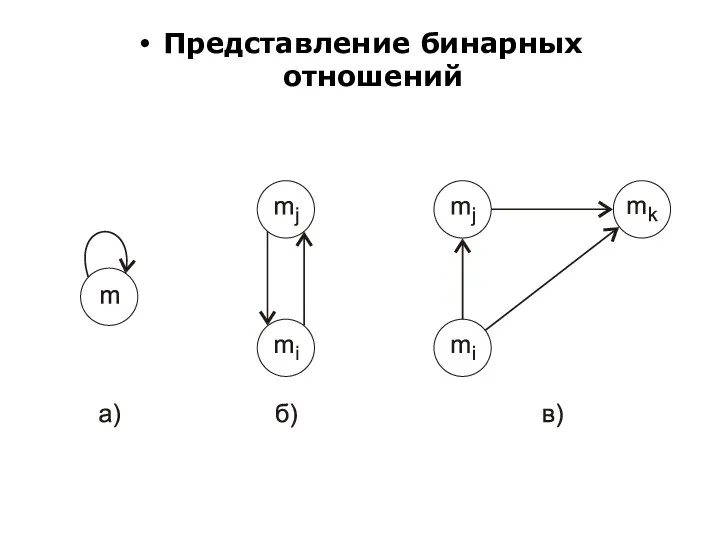
Представление бинарных отношений
Представление бинарных отношений
3. Задание графов
Граф можно задать так называемой матрицей смежности В, каждой
3. Задание графов
Граф можно задать так называемой матрицей смежности В, каждой
Матрица смежности
Каждая клетка bij соответствует квадрату множества М⋅М
Матрица смежности
Каждая клетка bij соответствует квадрату множества М⋅М

Задание орграфа
Задание орграфа
В описанном виде матрицы инцидентности применимы только к графам без петель,
В описанном виде матрицы инцидентности применимы только к графам без петель,
Граф может быть задан списочной структурой: списками смежности и массивами рёбер
Граф может быть задан списочной структурой: списками смежности и массивами рёбер
4. Характеристики графов
Маршруты, цепи, пути, циклы и контуры
4. Характеристики графов
Маршруты, цепи, пути, циклы и контуры
Маршрут – чередующаяся последовательность вершин и ребер, в которой два соседних
Маршрут – чередующаяся последовательность вершин и ребер, в которой два соседних
Если все вершины (а, значит и ребра) различны, то маршрут называется
Если все вершины (а, значит и ребра) различны, то маршрут называется
Деревья. Лес.
Граф связен, если любые две его вершины можно соединить цепью.
Деревья. Лес.
Граф связен, если любые две его вершины можно соединить цепью.
Деревья. Лес.
Деревом может быть задано отношение подчинения в трудовом коллективе, в
Деревья. Лес.
Деревом может быть задано отношение подчинения в трудовом коллективе, в
Степень вершины
Степенью вершины х, обозначаемой deg(х), называют число ребер, инцидентных ей.
Степень вершины
Степенью вершины х, обозначаемой deg(х), называют число ребер, инцидентных ей.
Теорема о сумме степеней вершин
Каждое ребро добавляет единицу к степени каждой
Теорема о сумме степеней вершин
Каждое ребро добавляет единицу к степени каждой
Подграф
Подграфом GΩ графа G=<М,Т> называется граф, в который входит лишь часть
Подграф
Подграфом GΩ графа G=<М,Т> называется граф, в который входит лишь часть
Частичный граф
Частичным графом GΔ по отношению к графу G называется граф,
Частичный граф
Частичным графом GΔ по отношению к графу G называется граф,
Если две вершины соединены ребром, то говорят, что каждая вершина инцидентна
Если две вершины соединены ребром, то говорят, что каждая вершина инцидентна
Если две вершины соединены ребром, то говорят, что каждая вершина инцидентна
Если две вершины соединены ребром, то говорят, что каждая вершина инцидентна
Если две вершины соединены ребром, то говорят, что каждая вершина инцидентна
Если две вершины соединены ребром, то говорят, что каждая вершина инцидентна
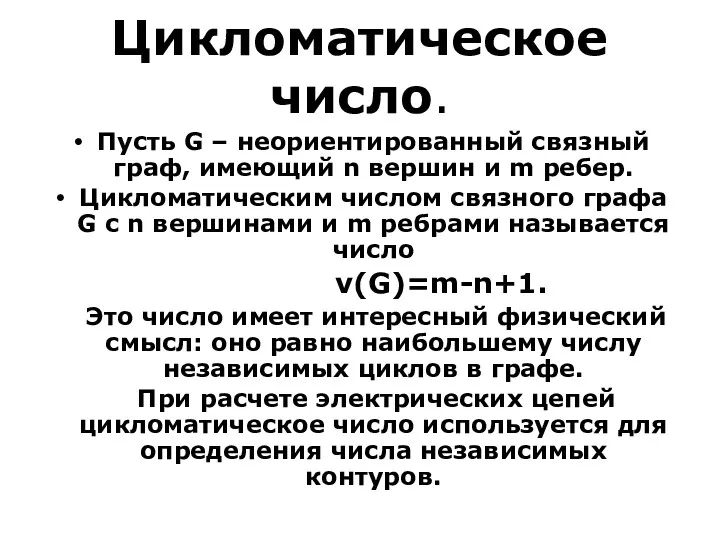
Цикломатическое число.
Пусть G – неориентированный связный граф, имеющий n вершин и
Цикломатическое число.
Пусть G – неориентированный связный граф, имеющий n вершин и
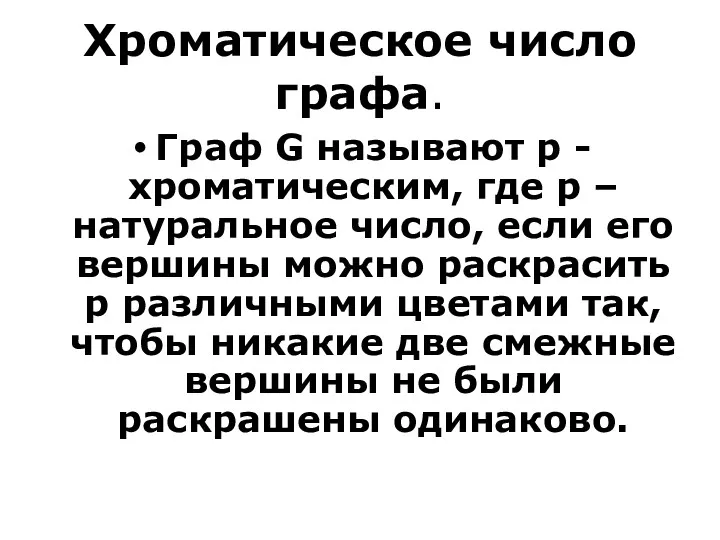
Хроматическое число графа.
Граф G называют р - хроматическим, где р –
Хроматическое число графа.
Граф G называют р - хроматическим, где р –
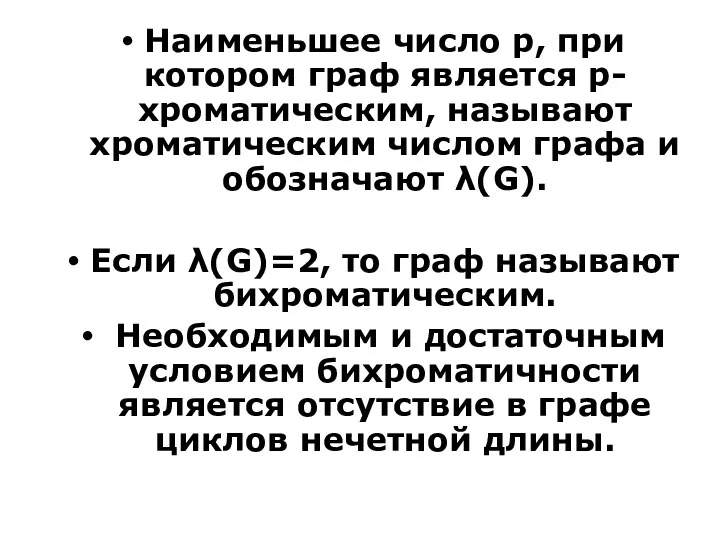
Наименьшее число р, при котором граф является р-хроматическим, называют хроматическим числом
Наименьшее число р, при котором граф является р-хроматическим, называют хроматическим числом
Примеры раскраски графов
Примеры раскраски графов
Френсис Гутри, студент де Моргана, в 1852 году: можно ли всякую расположенную на
Френсис Гутри, студент де Моргана, в 1852 году: можно ли всякую расположенную на
Проблема четырёх красок — математическая задача, предложенная Гутри (англ.) в 1852 году.
Проблема четырёх красок — математическая задача, предложенная Гутри (англ.) в 1852 году.
К. Аппель и В. Хакен доказали в 1976 г. С помощью
К. Аппель и В. Хакен доказали в 1976 г. С помощью
Изоморфизм графов.
Иногда не так легко понять, одинаково ли графы, изображенные разными
Изоморфизм графов.
Иногда не так легко понять, одинаково ли графы, изображенные разными
Изоморфизм графов
Если граф ориентированный, то направление дуг в изоморфных графах должно
Изоморфизм графов
Если граф ориентированный, то направление дуг в изоморфных графах должно
Иногда для определения изоморфности определяют параметры обоих графов: число вершин, число
Иногда для определения изоморфности определяют параметры обоих графов: число вершин, число
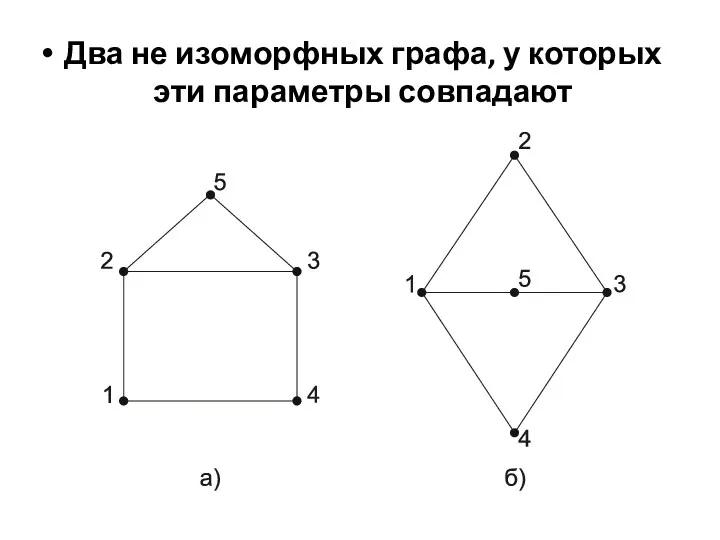
Два не изоморфных графа, у которых эти параметры совпадают
Два не изоморфных графа, у которых эти параметры совпадают
Понятие об операциях над графами.
Полный граф – это граф, в
Понятие об операциях над графами.
Полный граф – это граф, в
Понятие об операциях над графами.
Вводятся также операции объединения графов, когда
Понятие об операциях над графами.
Вводятся также операции объединения графов, когда

Сети Петри
Сети Петри — математический аппарат для моделирования динамических дискретных систем.
Сети Петри
Сети Петри — математический аппарат для моделирования динамических дискретных систем.

Сеть Петри представляет собой двудольный ориентированный граф, состоящий из вершин двух
Сеть Петри представляет собой двудольный ориентированный граф, состоящий из вершин двух
Сети Петри
Событием называют срабатывание перехода, при котором метки из входных позиций
Сети Петри
Событием называют срабатывание перехода, при котором метки из входных позиций
Основными свойствами сети Петри являются:
Ограниченность — число меток в любой позиции
Основными свойствами сети Петри являются:
Ограниченность — число меток в любой позиции
Некоторые виды сетей Петри:
Временная сеть Петри — переходы обладают весом,
Некоторые виды сетей Петри:
Временная сеть Петри — переходы обладают весом,
Некоторые виды сетей Петри:
Цветная сеть Петри — метки могут быть различных
Некоторые виды сетей Петри:
Цветная сеть Петри — метки могут быть различных
Множество устойчивости
Множеством внутренней устойчивости графа называется подмножество таких его вершин, которые
Множество устойчивости
Множеством внутренней устойчивости графа называется подмножество таких его вершин, которые
 Задачі на визначення, на скільки коротший. Обчислення значень виразів
Задачі на визначення, на скільки коротший. Обчислення значень виразів Умножение многочлена на многочлен. Алгебра 7 класс
Умножение многочлена на многочлен. Алгебра 7 класс Интегрирование по частям в определенном интеграле. Замена переменных при вычислении определенного интеграла. (Семинар 18)
Интегрирование по частям в определенном интеграле. Замена переменных при вычислении определенного интеграла. (Семинар 18) Математика+Габдулла Тукай
Математика+Габдулла Тукай Математический диктант
Математический диктант Перпендикулярность прямых и плоскостей
Перпендикулярность прямых и плоскостей Знаходження невідомого зменшуваного
Знаходження невідомого зменшуваного Величины. Объем. Литр
Величины. Объем. Литр Выпуклый анализ. Выпуклые функции.. Лекция 12
Выпуклый анализ. Выпуклые функции.. Лекция 12 Задачи мудрой совы (4 класс)
Задачи мудрой совы (4 класс) Классическое определение вероятности
Классическое определение вероятности Решение задач на проценты с помощью пропорций
Решение задач на проценты с помощью пропорций Урок 10. Случайные величины. Дискретные и непрерывные случайные величины (ДСВ и НСВ)
Урок 10. Случайные величины. Дискретные и непрерывные случайные величины (ДСВ и НСВ) Формулы сокращенного умножения
Формулы сокращенного умножения Решение Уравнений.. 6 класс
Решение Уравнений.. 6 класс Задачи на готовых чертежах. Первый признак равенства треугольников
Задачи на готовых чертежах. Первый признак равенства треугольников Умножение круглых чисел
Умножение круглых чисел Дидактическая игра Спрячь мышку
Дидактическая игра Спрячь мышку Задачі на дві дії різного ступеня: множення і додавання або віднімання (2 клас)
Задачі на дві дії різного ступеня: множення і додавання або віднімання (2 клас) Письмове ділення на одноцифрове число. Знаходження частини числа. Задачі на знаходження частини числа
Письмове ділення на одноцифрове число. Знаходження частини числа. Задачі на знаходження частини числа Умножение десятичной дроби на натуральное число. Урок математики в 5 классе
Умножение десятичной дроби на натуральное число. Урок математики в 5 классе Задачи на деление
Задачи на деление Вычитание вида 11-
Вычитание вида 11- synus_kosynus_tangens_gostrogo_kuta_pryamokutnogo_trykutnyka
synus_kosynus_tangens_gostrogo_kuta_pryamokutnogo_trykutnyka ЕГЭ - 2017 по математике. Базовый уровень. Задачи на логику и смекалку
ЕГЭ - 2017 по математике. Базовый уровень. Задачи на логику и смекалку Электронный тренажёр по математике для учащихся 1 класса. Тема: Материал для повторения и самоконтроля. ОС Перспектива
Электронный тренажёр по математике для учащихся 1 класса. Тема: Материал для повторения и самоконтроля. ОС Перспектива конспект по ФЭМП В гости к бабушке для второй младшей группы
конспект по ФЭМП В гости к бабушке для второй младшей группы Геометрия. 7 класс. Измерение отрезков и углов
Геометрия. 7 класс. Измерение отрезков и углов