- Сетевые задачи дискретной математики. Тема 5

Содержание
- 2. 1. Основные понятия Пусть G=(S, U) – ориентированный граф, S – множество вершин (узлов), U –
- 3. Пример сети (нагруженного орграфа)
- 4. Вес некоторого пути равен сумме весов дуг, его составляющих: ω(ABC)= ω(AB)+ ω(BC)=q1+q2 ω(ADEC)= ω(AD)+ ω(DE)+ ω(EC)=q3+q4+q5
- 5. 2. Алгоритм Дейкстры (алгоритм расстановки меток) Пусть G={S, U, Ω} – ориентированный граф со взвешенными дугами.
- 6. Постановка задачи В сети найти кратчайший путь, соединяющий две заданные вершины.
- 7. Замечания узлам сети xi∈ S приписываются числа (метки) d(xi) Если вершина xi получила на некотором шаге
- 8. Этапы алгоритма Дейкстры I этап – поиск длины кратчайшего пути от вершины s к вершине t,
- 9. Этап 1. Нахождение длины кратчайшего пути Шаг 1. Присвоение вершинам начальных меток. Пусть d(s) = 0*
- 10. Шаг 2. Изменение меток Для каждой вершины xi с временной меткой, непосредственно следующей за вершиной x’:
- 11. Шаг 3. Превращение метки из временной в постоянную Из всех вершин с временными метками выбираем вершину
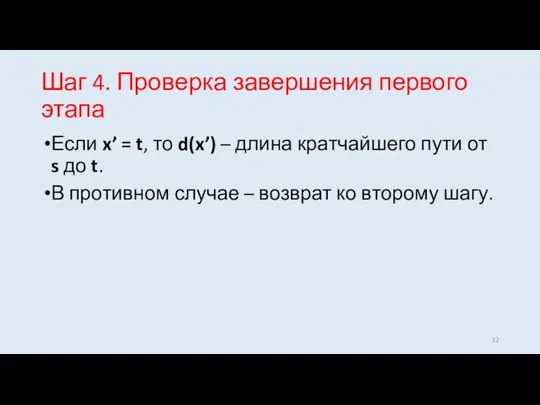
- 12. Шаг 4. Проверка завершения первого этапа Если x’ = t, то d(x’) – длина кратчайшего пути
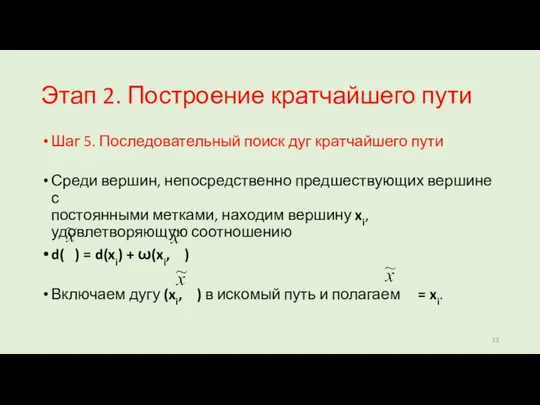
- 13. Этап 2. Построение кратчайшего пути Шаг 5. Последовательный поиск дуг кратчайшего пути Среди вершин, непосредственно предшествующих
- 14. Шаг 6. Проверка на завершение второго этапа Если = s, то кратчайший путь найден – последовательность
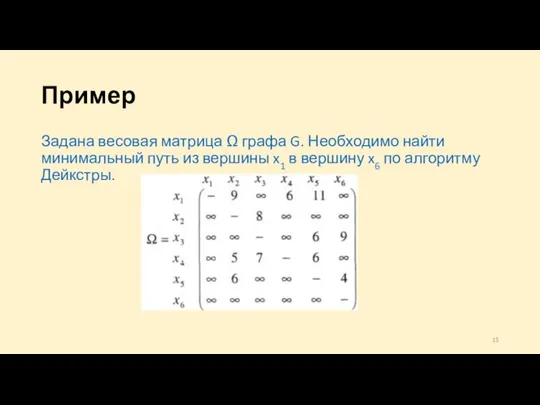
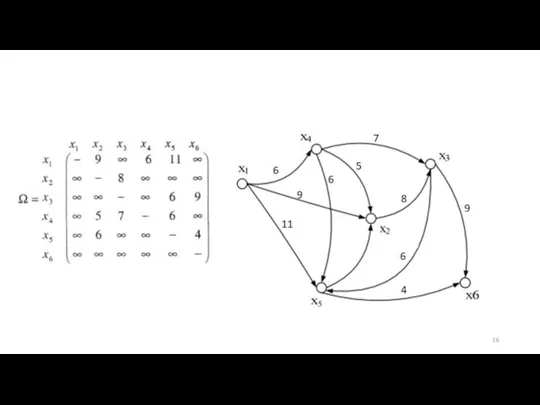
- 15. Пример Задана весовая матрица Ω графа G. Необходимо найти минимальный путь из вершины x1 в вершину
- 17. Этап 1. поиск длины кратчайшего пути от источника s к стоку t Шаг 1. Полагаем d(x1)
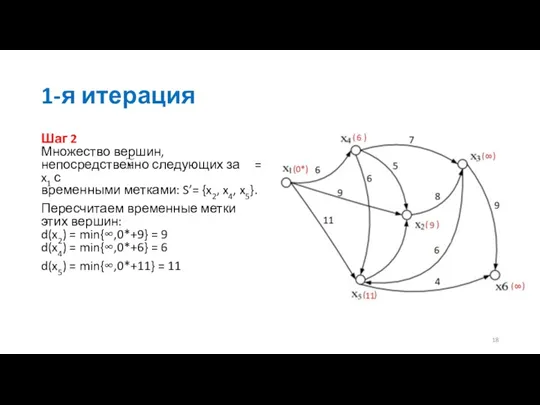
- 18. 1-я итерация Шаг 2 Множество вершин, непосредственно следующих за = x1 с временными метками: S’= {x2,
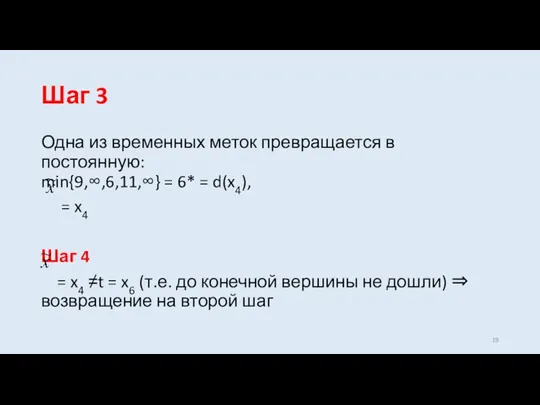
- 19. Шаг 3 Одна из временных меток превращается в постоянную: min{9,∞,6,11,∞} = 6* = d(x4), = x4
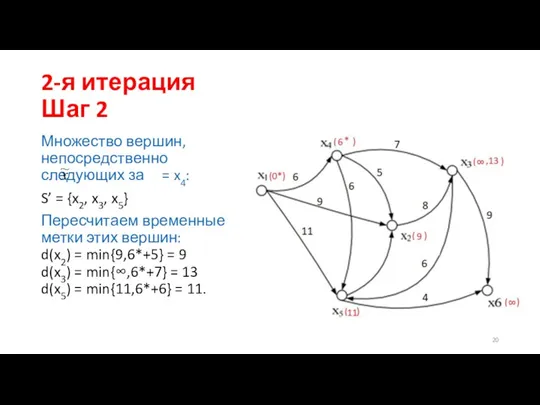
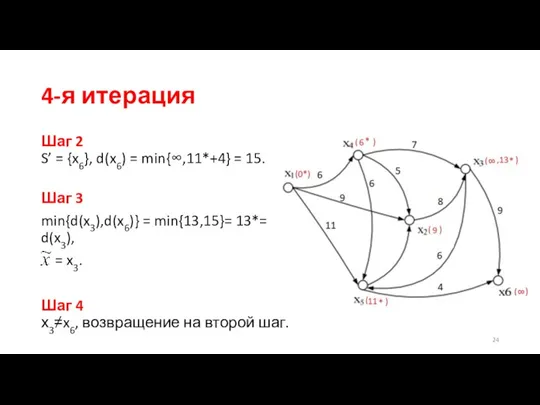
- 20. 2-я итерация Шаг 2 Множество вершин, непосредственно следующих за = x4: S’ = {x2, x3, x5}
- 21. Шаг 3 min{d(x2),d(x3),d(x5),d(x6)} = min{9, 13, 11, ∞}= 9*= d(x2), = x2. Шаг 4 x2≠x6 ⇒
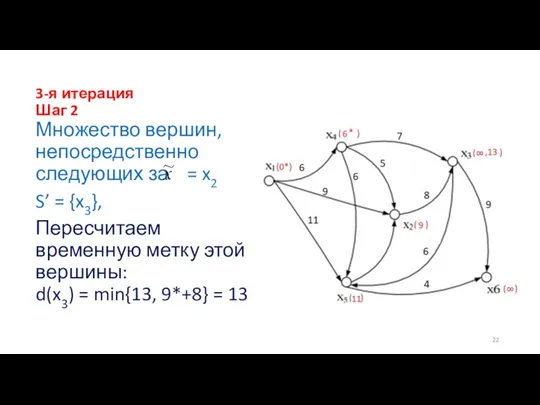
- 22. 3-я итерация Шаг 2 Множество вершин, непосредственно следующих за = x2 S’ = {x3}, Пересчитаем временную
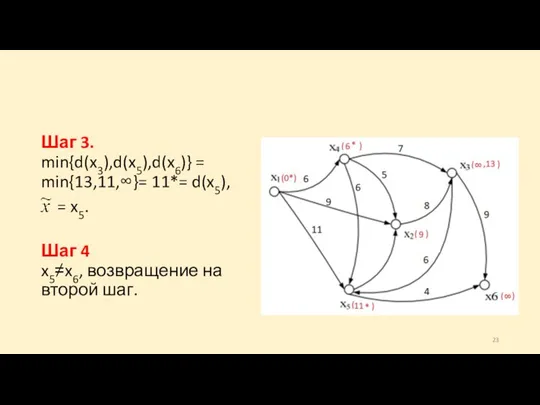
- 23. Шаг 3. min{d(x3),d(x5),d(x6)} = min{13,11,∞}= 11*= d(x5), = x5. Шаг 4 x5≠x6, возвращение на второй шаг.
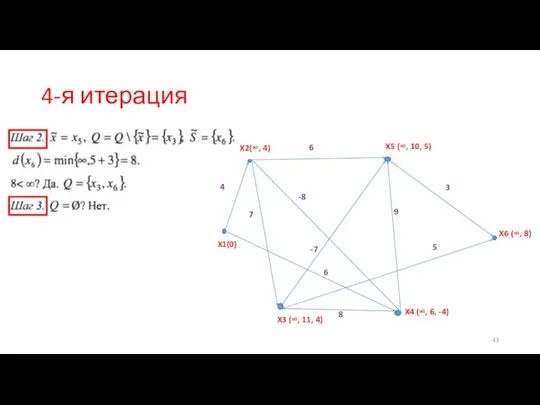
- 24. 4-я итерация Шаг 2 S’ = {x6}, d(x6) = min{∞,11*+4} = 15. Шаг 3 min{d(x3),d(x6)} =
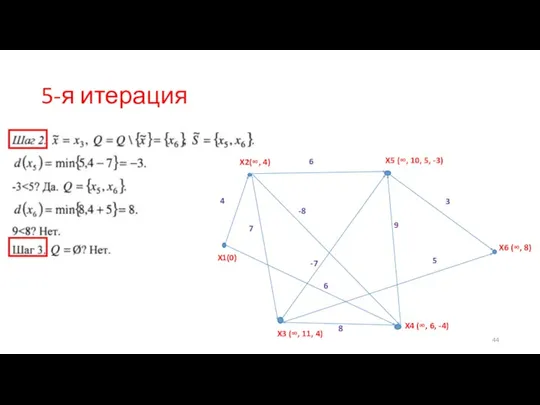
- 25. 5-я итерация Шаг 2 S’ = {x6}, d(x6) = min{15,13*+9} = 15. Шаг 3 min{d(x6)} =
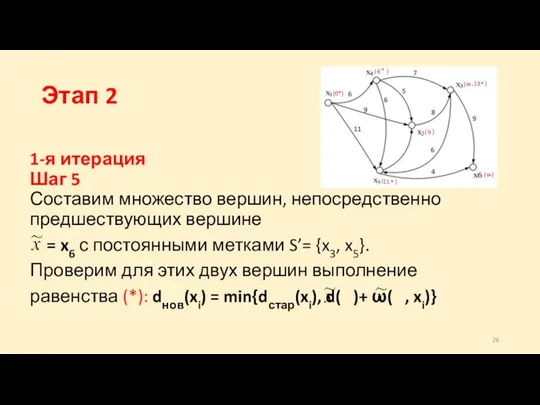
- 26. 1-я итерация Шаг 5 Составим множество вершин, непосредственно предшествующих вершине = x6 с постоянными метками S’=
- 27. d( ) = 15=11*+4 = d(x5)+ ω(x5, x6), d( ) = 15≠13*+9 = d(x3)+ ω(x3,x6). Включим
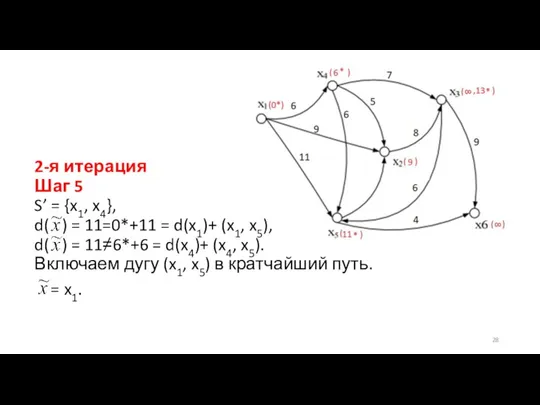
- 28. 2-я итерация Шаг 5 S’ = {x1, x4}, d( ) = 11=0*+11 = d(x1)+ (x1, x5),
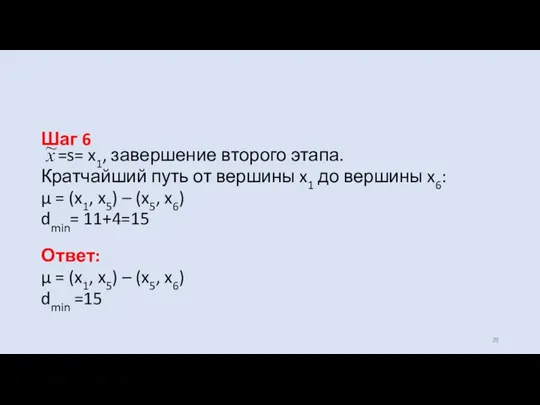
- 29. Шаг 6 =s= x1, завершение второго этапа. Кратчайший путь от вершины x1 до вершины x6: µ
- 30. 3. Алгоритм Беллмана-Мура (поиска кратчайших путей) Если веса – произвольные числа (в т.ч. отрицательные), то кратчайший
- 31. Вместо процедуры превращения временной метки в постоянную формируется очередь вершин. В процессе работы алгоритма одна и
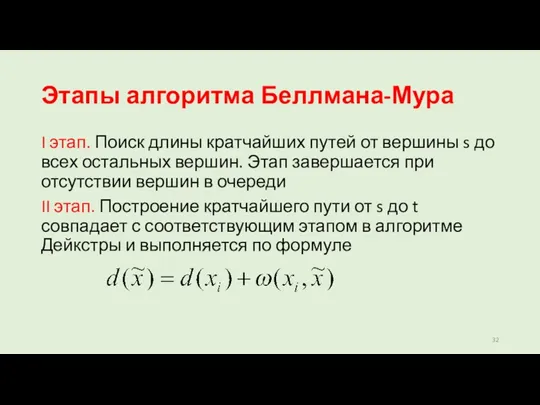
- 32. Этапы алгоритма Беллмана-Мура I этап. Поиск длины кратчайших путей от вершины s до всех остальных вершин.
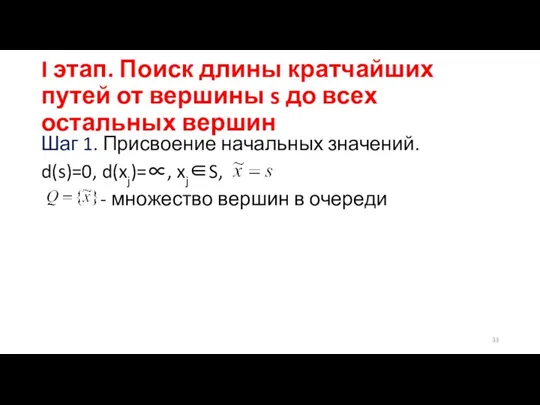
- 33. I этап. Поиск длины кратчайших путей от вершины s до всех остальных вершин Шаг 1. Присвоение
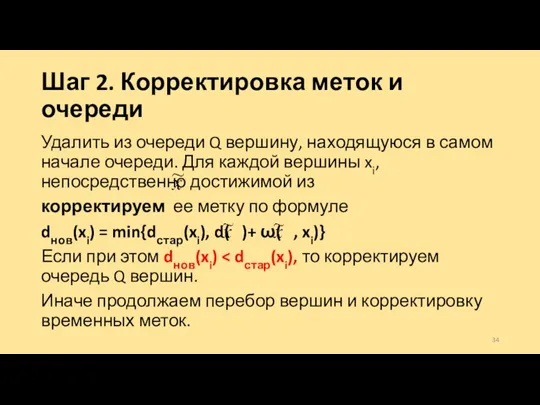
- 34. Шаг 2. Корректировка меток и очереди Удалить из очереди Q вершину, находящуюся в самом начале очереди.
- 35. Шаг 2. Корректировка меток и очереди Корректировка очереди Если вершина xi не была ранее в очереди
- 36. Шаг 3. Проверка на завершение первого этапа Если Q≠∅, то возвращаемся к началу шага 2. Если
- 37. II этап Построение кратчайшего пути от s до t совпадает с соответствующим этапом в алгоритме Дейкстры
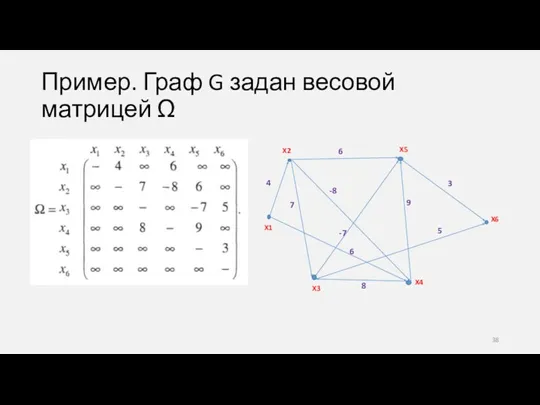
- 38. Пример. Граф G задан весовой матрицей Ω
- 39. Шаг 1. d(x1)=0, d(x2)=∝, d(x3)=∝, d(x4)=∝, d(x5)=∝, d(x6)=∝ Q={x1} - очередь Этап I
- 40. Этап I. 1-я итерация
- 41. 2-я итерация
- 42. 3-я итерация
- 43. 4-я итерация
- 44. 5-я итерация
- 45. 6-я итерация
- 46. 7-я итерация
- 47. Этап II. Шаг 4. 1-я итерация
- 48. Этап II. Шаг 4. 2-я итерация
- 49. Этап II. Шаг 4. 3-я итерация
- 50. Этап II. Шаг 4. 4-я итерация
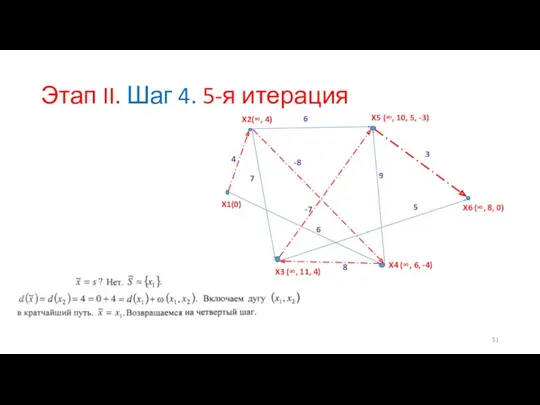
- 51. Этап II. Шаг 4. 5-я итерация
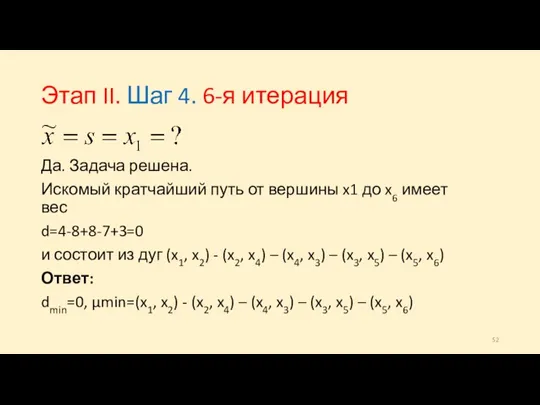
- 52. Этап II. Шаг 4. 6-я итерация Да. Задача решена. Искомый кратчайший путь от вершины x1 до
- 53. 4. Алгоритм нахождения максимального пути Замечания 1. Граф G (сеть) должен быть ациклическим. Если G -
- 54. 2) xi следует за xj; xi ∈ Sслед (xj); 3) нет пути между xi и xj.
- 55. Этап 1. Поиск длины максимального пути Пусть dj - длина максимального пути от вершины x1 до
- 56. Этап 2. Построение максимальных путей Максимальные пути можно построить методом последовательного возвращения (второй этап алгоритма Дейкстры).
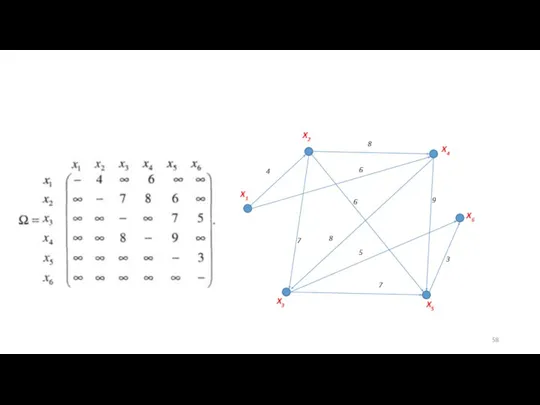
- 57. Пример Граф задан матрицей весов Ω. Построить максимальный путь из вершины x1 в x6. Найти длину
- 58. 6
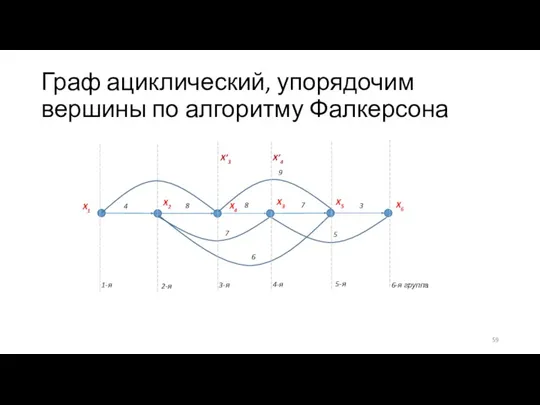
- 59. Граф ациклический, упорядочим вершины по алгоритму Фалкерсона X’3 X’4
- 60. Этап 1 d1 = 0, d2 = max (d1 + 4) = 4, d’3 = max
- 61. Этап 2 x6 : d6 = 30 = d5 + 3 = 27 +3 ⇒ включим
- 62. x’4: d = 20 = d+ 8 = 12 + 8 ⇒ включим дугу (x’3, x’4)
- 63. 5. Теорема Форда-Фалкерсона (задача о максимальном потоке и минимальном разрезе ) Большинство физически реализованных сетей -
- 64. Примеры потоков: - автомобильный транспорт по сети автодорог, - грузы по железнодорожной сети, - вода в
- 65. Замечания G(S, U, Ω) – связный граф без петель существует ровно одна вершина s (источник, source),
- 66. Функция ϕ(xi, хj), определенная на множестве дуг сети G=(S, U, Ω), называется потоком, если 0 ≤
- 67. Остаточная пропускная способность дуги (xi, хj): ∆(xi, хj) = с(xi, хj) – ϕ(xi, хj) Если с(xi,
- 68. S= S1∪ S2 S1 ∩ S2 = ∅ Множество дуг, начала которых лежат в S1, а
- 69. Теорема Форда-Фалкерсона Для любой сети с одним источником и одним стоком величина максимального потока в сети
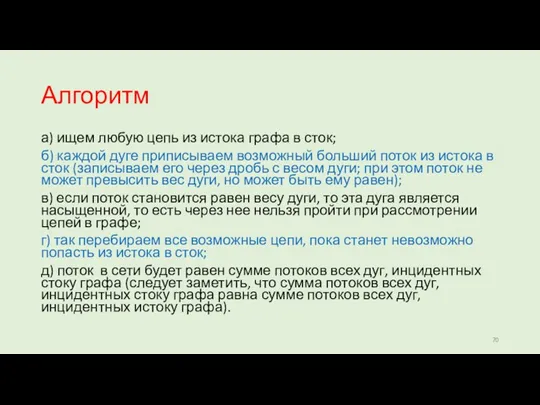
- 70. Алгоритм а) ищем любую цепь из истока графа в сток; б) каждой дуге приписываем возможный больший
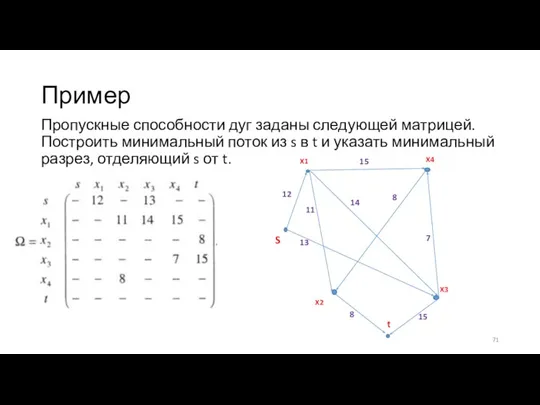
- 71. Пример Пропускные способности дуг заданы следующей матрицей. Построить минимальный поток из s в t и указать
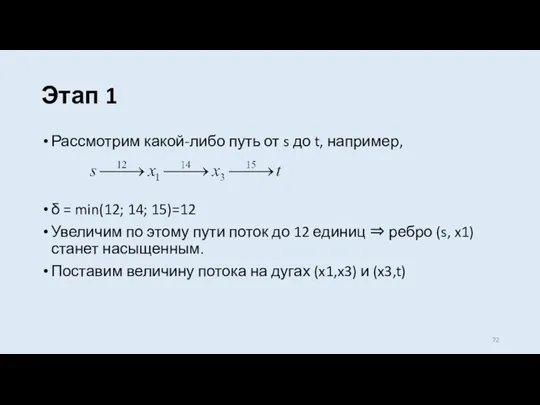
- 72. Этап 1 Рассмотрим какой-либо путь от s до t, например, δ = min(12; 14; 15)=12 Увеличим
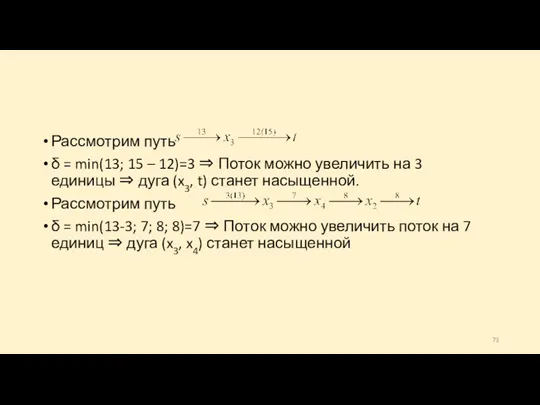
- 73. Рассмотрим путь δ = min(13; 15 – 12)=3 ⇒ Поток можно увеличить на 3 единицы ⇒
- 74. Больше путей нет, конец первого этапа.
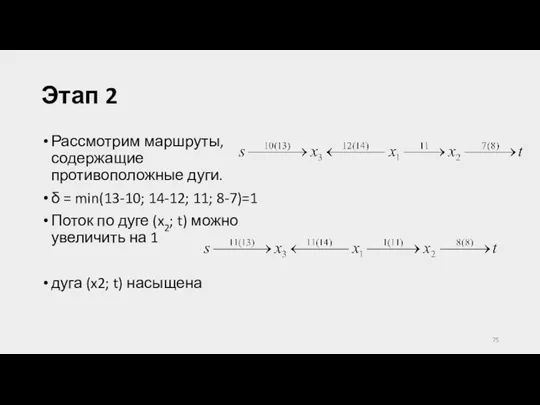
- 75. Этап 2 Рассмотрим маршруты, содержащие противоположные дуги. δ = min(13-10; 14-12; 11; 8-7)=1 Поток по дуге
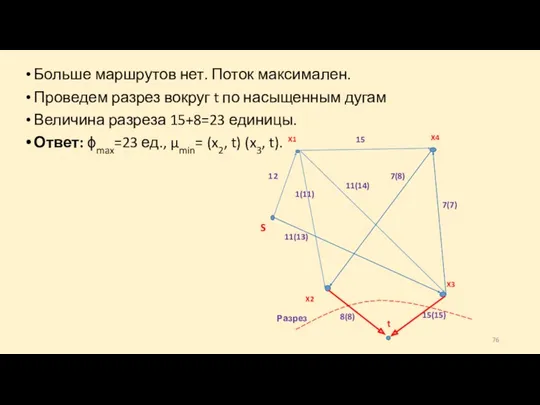
- 76. Больше маршрутов нет. Поток максимален. Проведем разрез вокруг t по насыщенным дугам Величина разреза 15+8=23 единицы.
- 77. 6. Система ПЕРТ Program (Project) Evaluation and Review Technique (PERT) — метод оценки и анализа проектов,
- 78. Некоторые термины Событие PERT (PERT event) - момент, отмечающий начало или окончание одной или нескольких задач.
- 79. Последующее событие (successor event) — событие, которое следует за некоторым событием непосредственно, без промежуточных событий. Любое
- 80. Проскальзывание или провисание (float, slack) — мера дополнительного времени и ресурсов, доступных для выполнения работы. Время,
- 81. Критический путь (critical path) — длиннейший маршрут на пути от начального до финального события. Критический путь
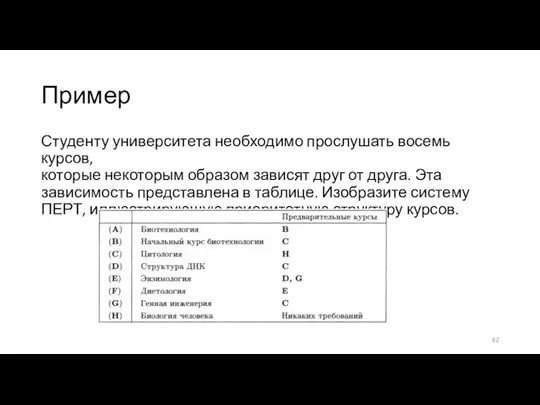
- 82. Пример Студенту университета необходимо прослушать восемь курсов, которые некоторым образом зависят друг от друга. Эта зависимость
- 83. Система ПЕРТ представляет собой орграф, описывающий данную приоритетную структуру. Вершины орграфа — восемь курсов. Дуги орграфа
- 84. Определить порядок изучения курсов можно, например, по алгоритму топологической сортировки. Алгоритм создает последовательность согласованных меток для
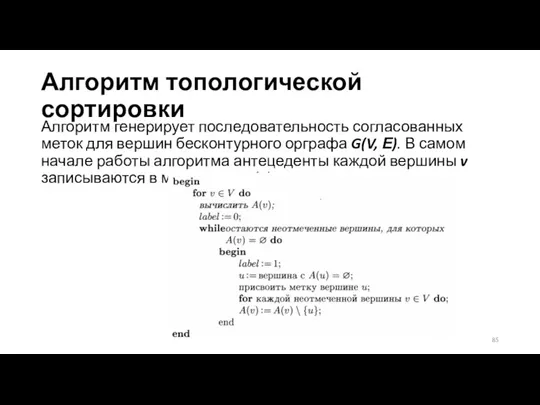
- 85. Алгоритм топологической сортировки Алгоритм генерирует последовательность согласованных меток для вершин бесконтурного орграфа G(V, Е). В самом
- 86. Алгоритм успешно присваивает метки вершинам. Каждая вершина получает очередную метку в том случае, если у нее
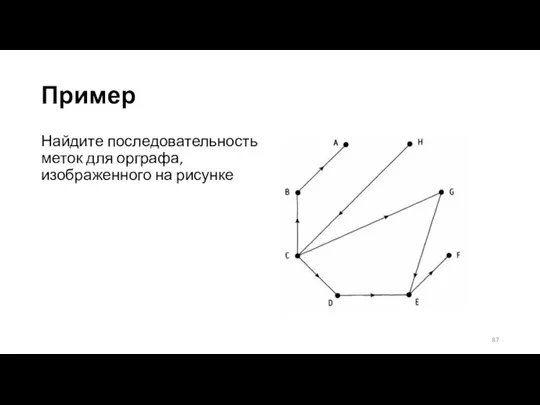
- 87. Пример Найдите последовательность меток для орграфа, изображенного на рисунке
- 88. Шаг 0 Множество антецедентов: А(А) = {В}, A(В) = {С}, А(С) = {Н}, A(D) = {С},
- 89. Шаг 1
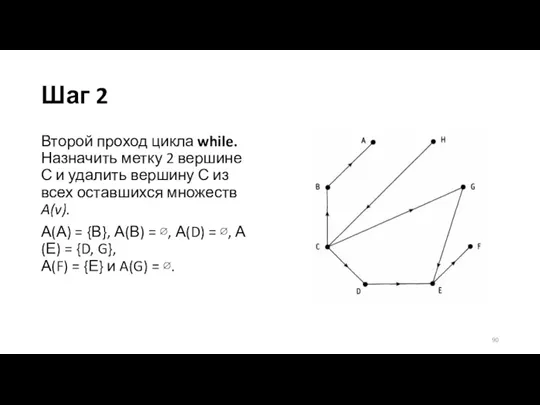
- 90. Шаг 2 Второй проход цикла while. Назначить метку 2 вершине С и удалить вершину С из
- 91. Шаг 3
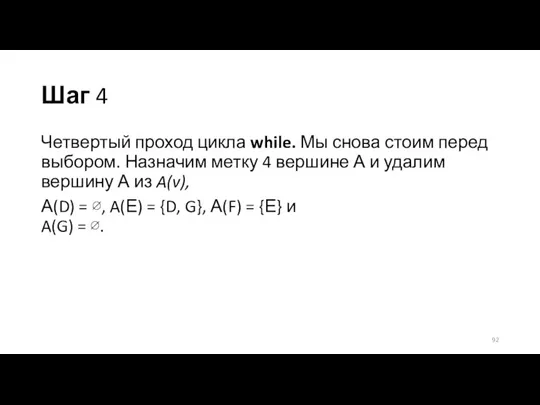
- 92. Шаг 4 Четвертый проход цикла while. Мы снова стоим перед выбором. Назначим метку 4 вершине А
- 93. Шаг 5 Пятый проход цикла while. Назначим метку 5 вершине D и удалим вершину D из
- 94. Шаг 6 Шестой проход цикла while. Назначим метку 6 вершине G и удалим вершину G из
- 95. Шаг 7 Седьмой проход цикла while. Назначаем метку 7 вершине Е и удаляем Е из списка
- 96. Шаг 8 Последний проход цикла while. Назначаем метку 8 вершине F. Получили один из возможных приоритетных
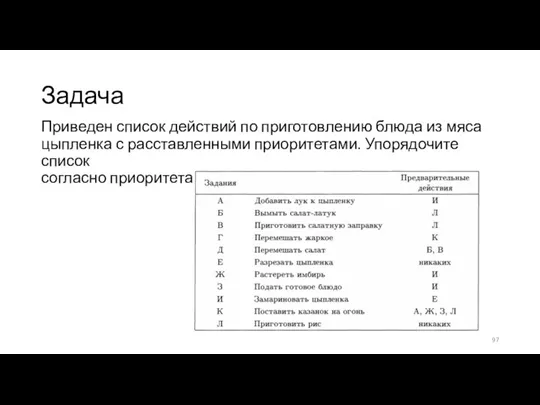
- 97. Задача Приведен список действий по приготовлению блюда из мяса цыпленка с расставленными приоритетами. Упорядочите список согласно
- 98. 7. Коммуникационные сети Коммуникационная сеть - это соединение определенным образом участвующих в коммуникационном процессе индивидов (узлов,
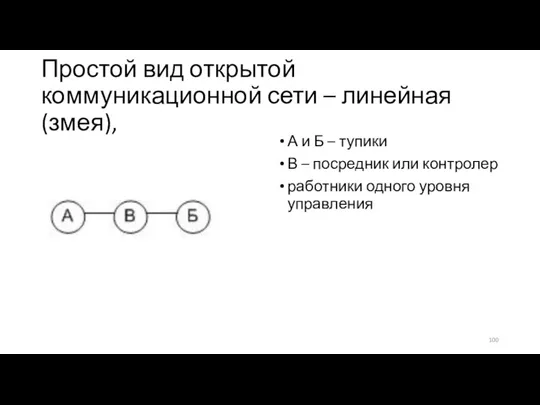
- 100. Простой вид открытой коммуникационной сети – линейная (змея), А и Б – тупики В – посредник
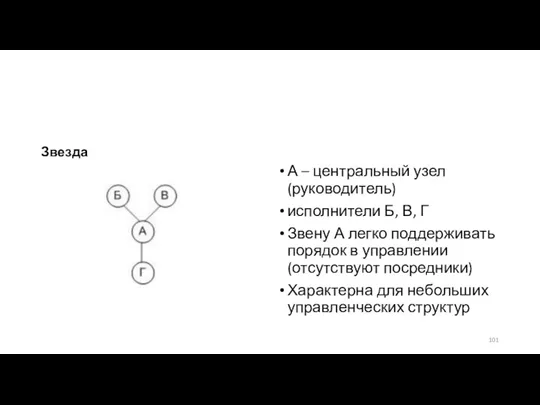
- 101. Звезда А – центральный узел (руководитель) исполнители Б, В, Г Звену А легко поддерживать порядок в
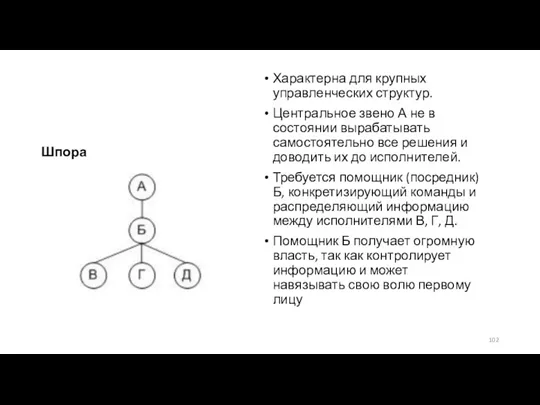
- 102. Шпора Характерна для крупных управленческих структур. Центральное звено А не в состоянии вырабатывать самостоятельно все решения
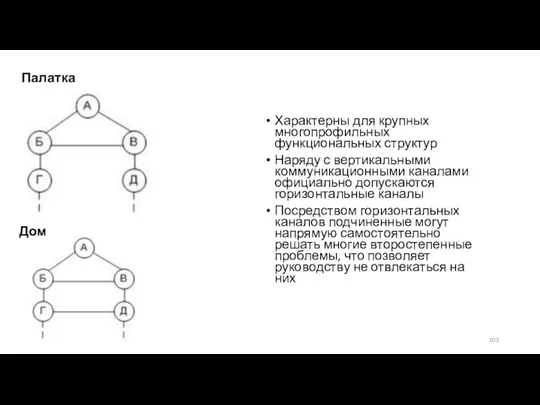
- 103. Палатка Характерны для крупных многопрофильных функциональных структур Наряду с вертикальными коммуникационными каналами официально допускаются горизонтальные каналы
- 104. В «палатке» допускается один уровень горизонтальной коммуникации - между вторыми лицами; в «доме» же такие каналы
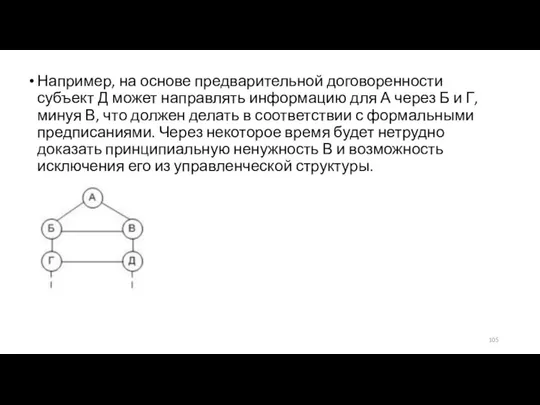
- 105. Например, на основе предварительной договоренности субъект Д может направлять информацию для А через Б и Г,
- 106. В целом открытые коммуникационные структуры присущи бюрократическим структурам (жесткое подчинение одних звеньев другим, преобладают формальные связи)
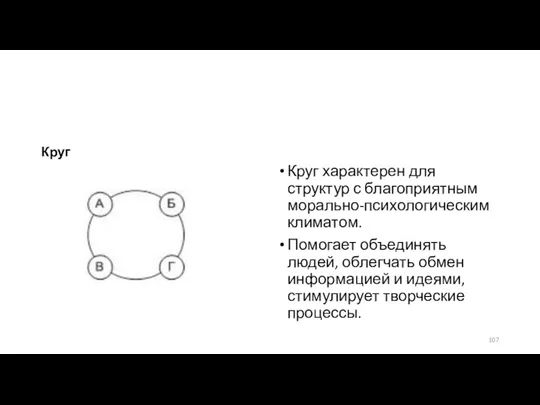
- 107. Круг Круг характерен для структур с благоприятным морально-психологическим климатом. Помогает объединять людей, облегчать обмен информацией и
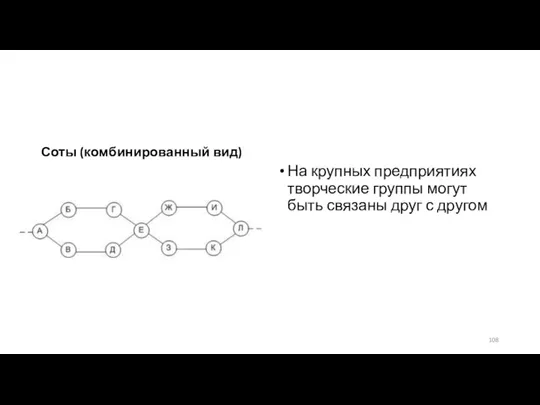
- 108. Соты (комбинированный вид) На крупных предприятиях творческие группы могут быть связаны друг с другом
- 109. Рассмотрим пример коммуникационной сети - модель компьютерной сети - ориентированный граф Вершины — компьютерные компоненты, дуги
- 110. Пример простой сети из семи узлов Рис. 1. Сеть из семи узлов
- 111. После ввода в действие сети возникает вопрос: как передавать сообщения между несмежными узлами? Процедура статической маршрутизации
- 112. Процедура динамической маршрутизации постоянно корректирует пропускную способность линий с учетом потребности. Чтобы узлам «решать», когда и
- 113. Каждый узел сети на рис. 1 «прогоняет» алгоритм Дейкстры для определения наилучших путей к другим узлам
- 114. Рис. 1. Сеть из семи узлов Рис. 2. Дерево передачи информации узла 1
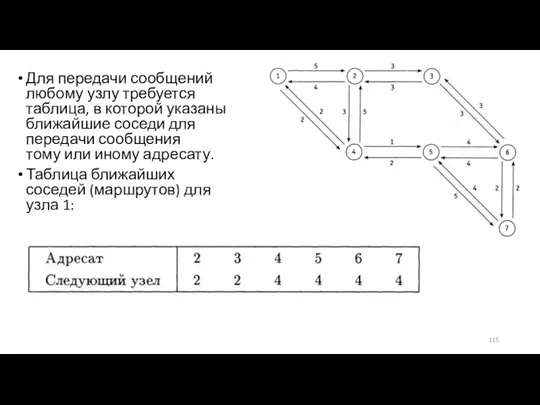
- 115. Для передачи сообщений любому узлу требуется таблица, в которой указаны ближайшие соседи для передачи сообщения тому
- 116. З а д а ч а 1. Используя алгоритм Дейкстры, найти кратчайшие пути от узла 2
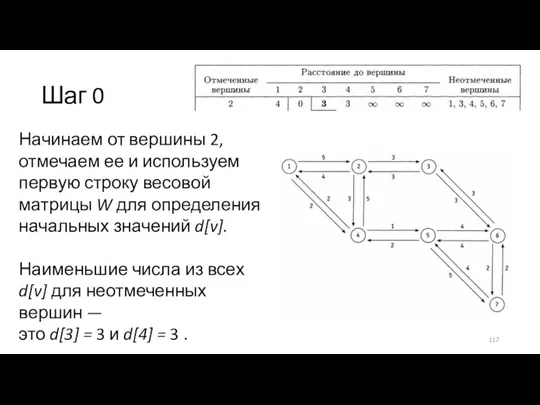
- 117. Шаг 0 Начинаем от вершины 2, отмечаем ее и используем первую строку весовой матрицы W для
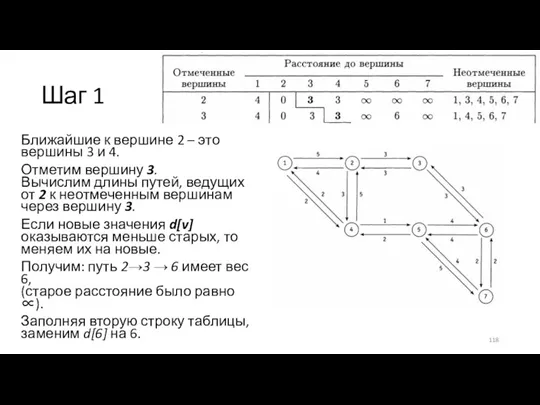
- 118. Шаг 1 Ближайшие к вершине 2 – это вершины 3 и 4. Отметим вершину 3. Вычислим
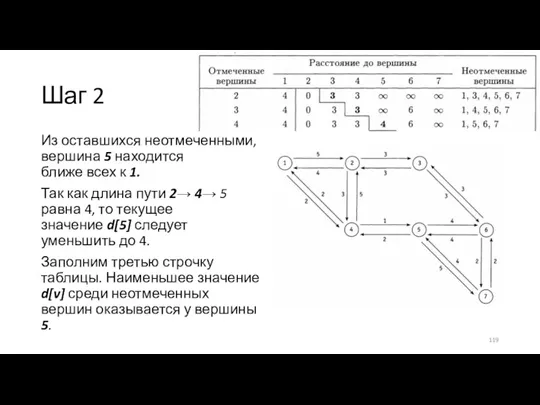
- 119. Шаг 2 Из оставшихся неотмеченными, вершина 5 находится ближе всех к 1. Так как длина пути
- 120. Шаг 3 Отметим вершину 5 и подправим значения d[v]. Можно дойти и до вершины 7, следуя
- 121. Шаг 4 Отметим вершину 1 Из неотмеченных вершин минимальное значение соответствует вершине 6. Его длина, т.е.
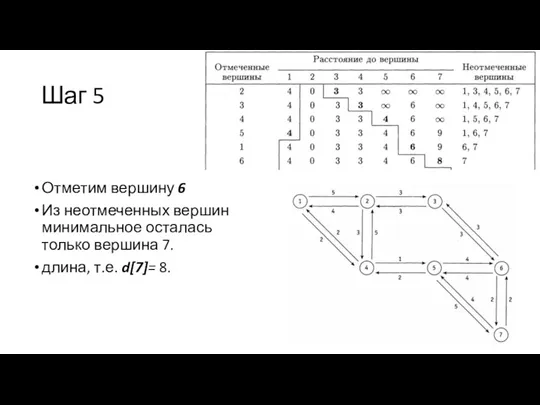
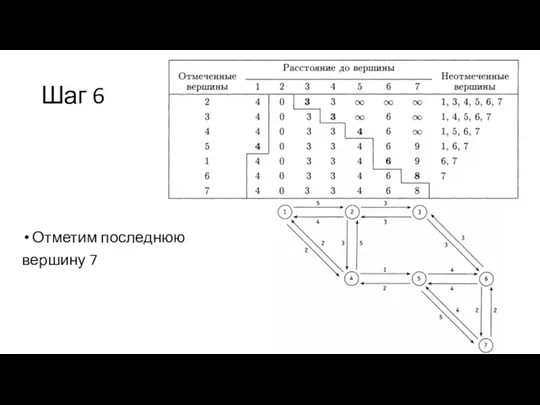
- 122. Шаг 5 Отметим вершину 6 Из неотмеченных вершин минимальное осталась только вершина 7. длина, т.е. d[7]=
- 123. Шаг 6 Отметим последнюю вершину 7
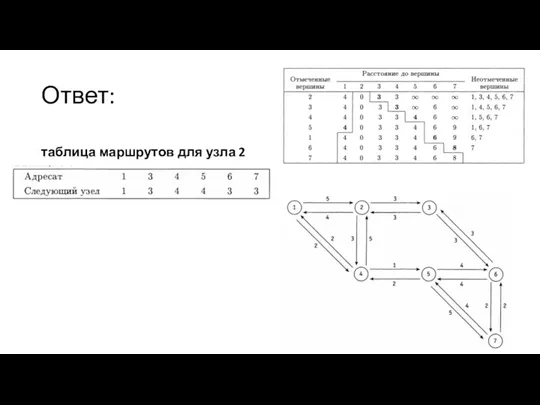
- 124. Рис. 3. Дерево кратчайших путей от вершины 2 к любой другой Ответ:
- 125. Ответ: таблица маршрутов для узла 2
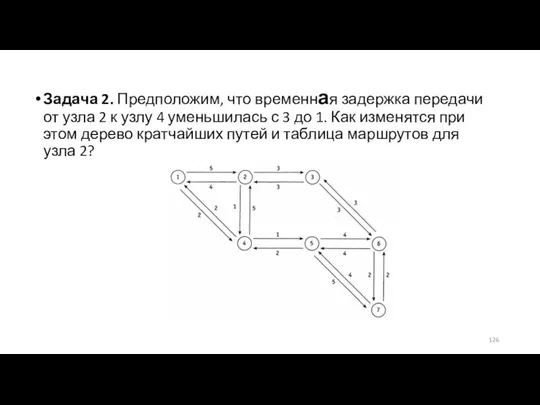
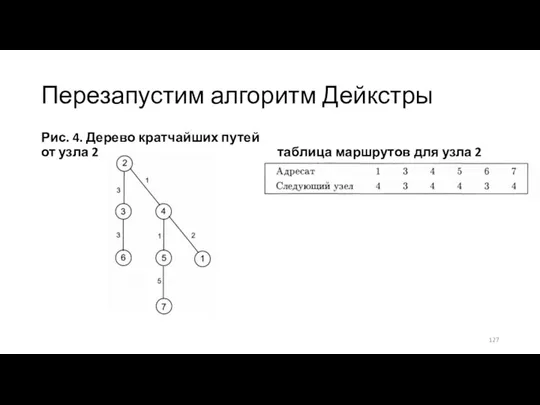
- 126. Задача 2. Предположим, что временная задержка передачи от узла 2 к узлу 4 уменьшилась с 3
- 127. Перезапустим алгоритм Дейкстры Рис. 4. Дерево кратчайших путей от узла 2 таблица маршрутов для узла 2
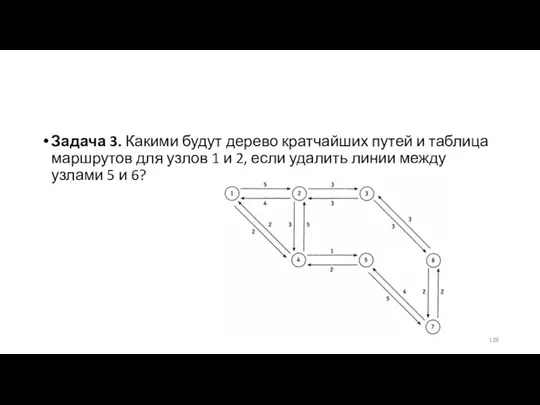
- 128. Задача 3. Какими будут дерево кратчайших путей и таблица маршрутов для узлов 1 и 2, если
- 129. Решение. Поскольку линия 5 → 6 не задействована при передаче информации от узла 2, то его
- 130. Что касается узла 1, то мы можем ограничиться поиском кратчайшего пути от узла 1 к узлу
- 132. Скачать презентацию
1. Основные понятия
Пусть G=(S, U) – ориентированный граф, S – множество
1. Основные понятия
Пусть G=(S, U) – ориентированный граф, S – множество

Пример сети (нагруженного орграфа)
Пример сети (нагруженного орграфа)
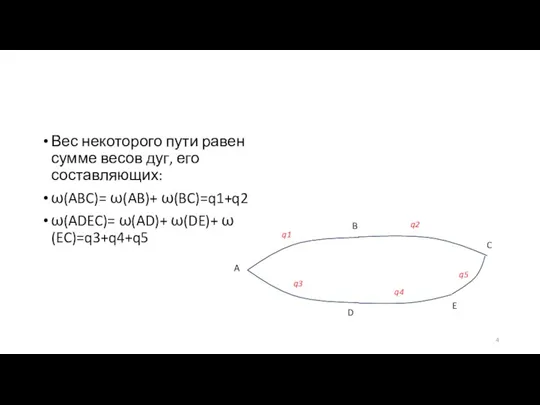
Вес некоторого пути равен сумме весов дуг, его составляющих:
ω(ABC)= ω(AB)+ ω(BC)=q1+q2
ω(ADEC)=
Вес некоторого пути равен сумме весов дуг, его составляющих:
ω(ABC)= ω(AB)+ ω(BC)=q1+q2
ω(ADEC)=
2. Алгоритм Дейкстры (алгоритм расстановки меток)
Пусть G={S, U, Ω} – ориентированный
2. Алгоритм Дейкстры (алгоритм расстановки меток)
Пусть G={S, U, Ω} – ориентированный
Постановка задачи
В сети найти кратчайший путь, соединяющий две заданные вершины.
Постановка задачи
В сети найти кратчайший путь, соединяющий две заданные вершины.
Замечания
узлам сети xi∈ S приписываются числа (метки) d(xi)
Если вершина xi получила
Замечания
узлам сети xi∈ S приписываются числа (метки) d(xi)
Если вершина xi получила
Этапы алгоритма Дейкстры
I этап – поиск длины кратчайшего пути от вершины
Этапы алгоритма Дейкстры
I этап – поиск длины кратчайшего пути от вершины
Этап 1. Нахождение длины кратчайшего пути
Шаг 1. Присвоение вершинам начальных меток.
Пусть
Этап 1. Нахождение длины кратчайшего пути
Шаг 1. Присвоение вершинам начальных меток. Пусть
Шаг 2. Изменение меток
Для каждой вершины xi с временной меткой, непосредственно
следующей
Шаг 2. Изменение меток
Для каждой вершины xi с временной меткой, непосредственно следующей
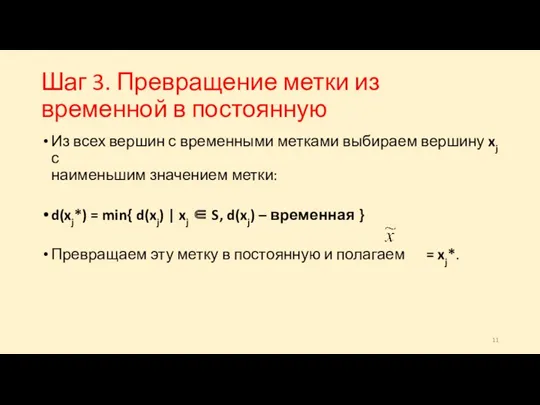
Шаг 3. Превращение метки из временной в постоянную
Из всех вершин с
Шаг 3. Превращение метки из временной в постоянную
Из всех вершин с
Шаг 4. Проверка завершения первого этапа
Если x’ = t, то d(x’)
Шаг 4. Проверка завершения первого этапа
Если x’ = t, то d(x’)
Этап 2. Построение кратчайшего пути
Шаг 5. Последовательный поиск дуг кратчайшего пути
Среди
Этап 2. Построение кратчайшего пути
Шаг 5. Последовательный поиск дуг кратчайшего пути
Среди
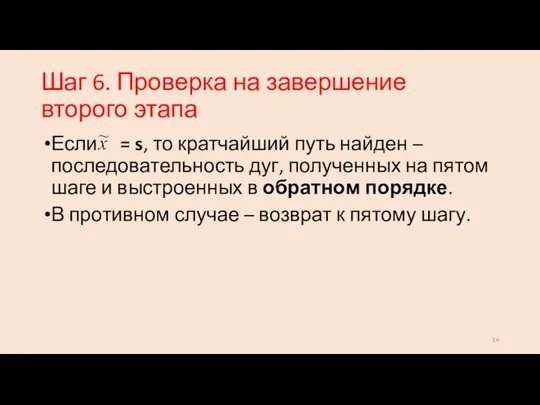
Шаг 6. Проверка на завершение второго этапа
Если = s, то кратчайший
Шаг 6. Проверка на завершение второго этапа
Если = s, то кратчайший
Пример
Задана весовая матрица Ω графа G. Необходимо найти минимальный путь из
Пример
Задана весовая матрица Ω графа G. Необходимо найти минимальный путь из
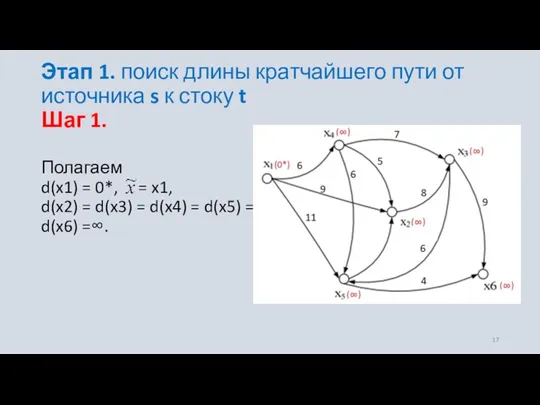
Этап 1. поиск длины кратчайшего пути от источника s к стоку
Этап 1. поиск длины кратчайшего пути от источника s к стоку
1-я итерация
Шаг 2
Множество вершин, непосредственно следующих за = x1 с
временными метками:
1-я итерация
Шаг 2 Множество вершин, непосредственно следующих за = x1 с временными метками:
Шаг 3
Одна из временных меток превращается в постоянную:
min{9,∞,6,11,∞} = 6* =
Шаг 3
Одна из временных меток превращается в постоянную: min{9,∞,6,11,∞} = 6* =
2-я итерация
Шаг 2
Множество вершин, непосредственно следующих за = x4:
S’ = {x2,
2-я итерация
Шаг 2
Множество вершин, непосредственно следующих за = x4:
S’ = {x2,
Шаг 3
min{d(x2),d(x3),d(x5),d(x6)} = min{9, 13, 11, ∞}= 9*= d(x2),
=
Шаг 3
min{d(x2),d(x3),d(x5),d(x6)} = min{9, 13, 11, ∞}= 9*= d(x2),
=
3-я итерация
Шаг 2
Множество вершин, непосредственно следующих за = x2
S’ =
3-я итерация
Шаг 2
Множество вершин, непосредственно следующих за = x2
S’ =
Шаг 3.
min{d(x3),d(x5),d(x6)} = min{13,11,∞}= 11*= d(x5),
= x5.
Шаг 4
x5≠x6, возвращение на
Шаг 3.
min{d(x3),d(x5),d(x6)} = min{13,11,∞}= 11*= d(x5),
= x5.
Шаг 4
x5≠x6, возвращение на
4-я итерация
Шаг 2
S’ = {x6}, d(x6) = min{∞,11*+4} = 15.
Шаг 3
min{d(x3),d(x6)}
4-я итерация
Шаг 2
S’ = {x6}, d(x6) = min{∞,11*+4} = 15.
Шаг 3
min{d(x3),d(x6)}
5-я итерация
Шаг 2
S’ = {x6}, d(x6) = min{15,13*+9} = 15.
Шаг 3
min{d(x6)}
5-я итерация
Шаг 2
S’ = {x6}, d(x6) = min{15,13*+9} = 15.
Шаг 3
min{d(x6)}
1-я итерация
Шаг 5
Составим множество вершин, непосредственно предшествующих вершине
= x6 с
1-я итерация
Шаг 5
Составим множество вершин, непосредственно предшествующих вершине
= x6 с
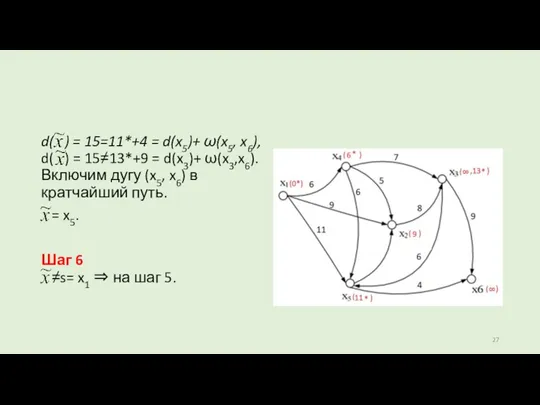
d( ) = 15=11*+4 = d(x5)+ ω(x5, x6),
d( ) = 15≠13*+9
d( ) = 15=11*+4 = d(x5)+ ω(x5, x6), d( ) = 15≠13*+9
2-я итерация
Шаг 5
S’ = {x1, x4},
d( ) = 11=0*+11 = d(x1)+
2-я итерация Шаг 5 S’ = {x1, x4}, d( ) = 11=0*+11 = d(x1)+
Шаг 6
=s= x1, завершение второго этапа.
Кратчайший путь от вершины x1
Шаг 6
=s= x1, завершение второго этапа.
Кратчайший путь от вершины x1
3. Алгоритм Беллмана-Мура (поиска кратчайших путей)
Если веса – произвольные числа (в
3. Алгоритм Беллмана-Мура (поиска кратчайших путей)
Если веса – произвольные числа (в
Вместо процедуры превращения временной метки в постоянную формируется очередь вершин.
В
Вместо процедуры превращения временной метки в постоянную формируется очередь вершин.
В
Этапы алгоритма Беллмана-Мура
I этап. Поиск длины кратчайших путей от вершины s
Этапы алгоритма Беллмана-Мура
I этап. Поиск длины кратчайших путей от вершины s
I этап. Поиск длины кратчайших путей от вершины s до всех
I этап. Поиск длины кратчайших путей от вершины s до всех
Шаг 2. Корректировка меток и очереди
Удалить из очереди Q вершину,
Шаг 2. Корректировка меток и очереди
Удалить из очереди Q вершину,
Шаг 2. Корректировка меток и очереди
Корректировка очереди
Если вершина xi не
Шаг 2. Корректировка меток и очереди
Корректировка очереди
Если вершина xi не
Шаг 3. Проверка на завершение первого этапа
Если Q≠∅, то возвращаемся к
Шаг 3. Проверка на завершение первого этапа
Если Q≠∅, то возвращаемся к
II этап
Построение кратчайшего пути от s до t совпадает с соответствующим
II этап
Построение кратчайшего пути от s до t совпадает с соответствующим
Пример. Граф G задан весовой матрицей Ω
Пример. Граф G задан весовой матрицей Ω
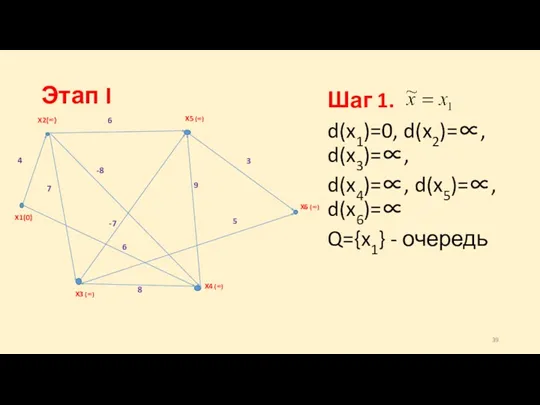
Шаг 1.
d(x1)=0, d(x2)=∝, d(x3)=∝,
d(x4)=∝, d(x5)=∝, d(x6)=∝
Q={x1} - очередь
Этап I
Шаг 1.
d(x1)=0, d(x2)=∝, d(x3)=∝,
d(x4)=∝, d(x5)=∝, d(x6)=∝
Q={x1} - очередь
Этап I
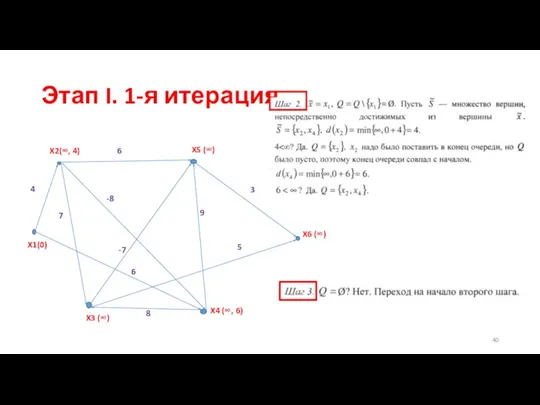
Этап I. 1-я итерация
Этап I. 1-я итерация
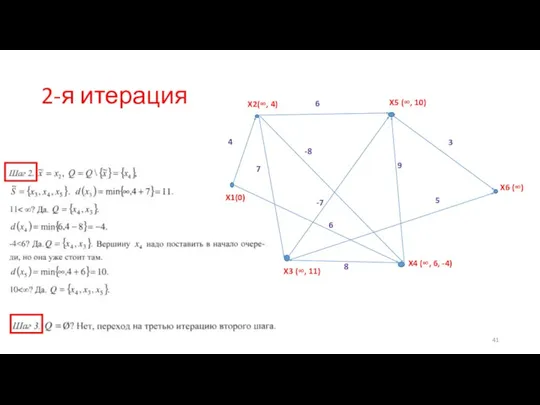
2-я итерация
2-я итерация
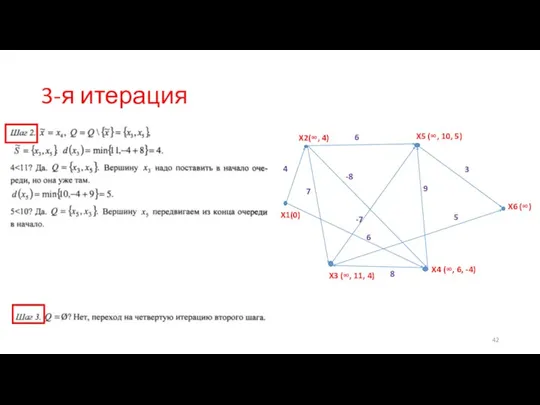
3-я итерация
3-я итерация
4-я итерация
4-я итерация
5-я итерация
5-я итерация
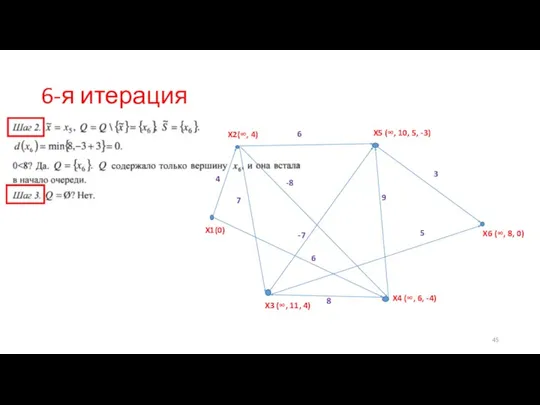
6-я итерация
6-я итерация
7-я итерация
7-я итерация
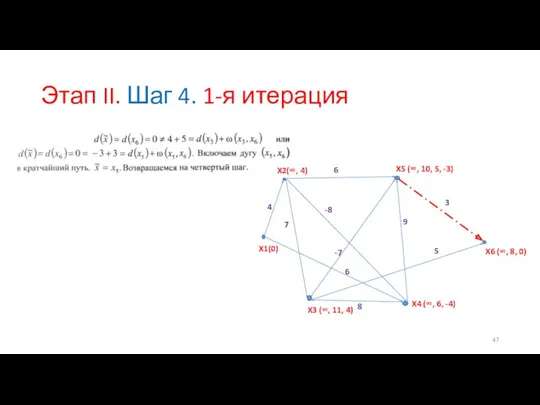
Этап II. Шаг 4. 1-я итерация
Этап II. Шаг 4. 1-я итерация
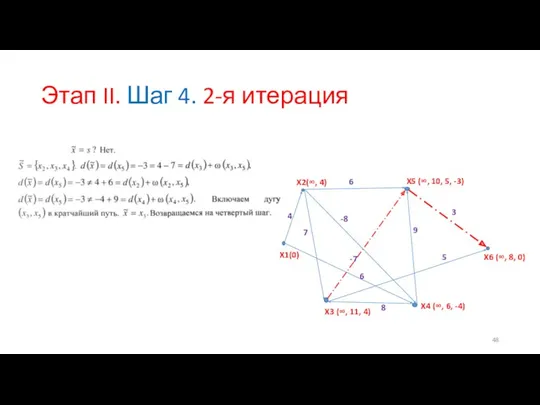
Этап II. Шаг 4. 2-я итерация
Этап II. Шаг 4. 2-я итерация
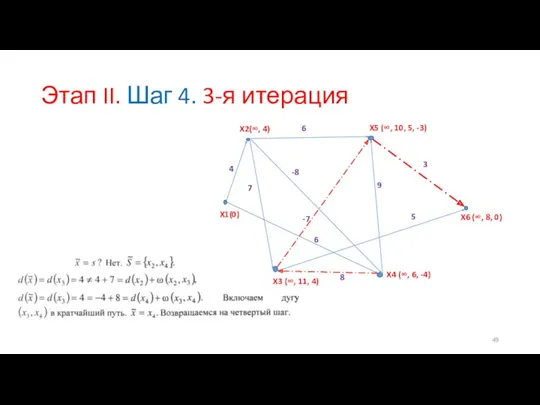
Этап II. Шаг 4. 3-я итерация
Этап II. Шаг 4. 3-я итерация
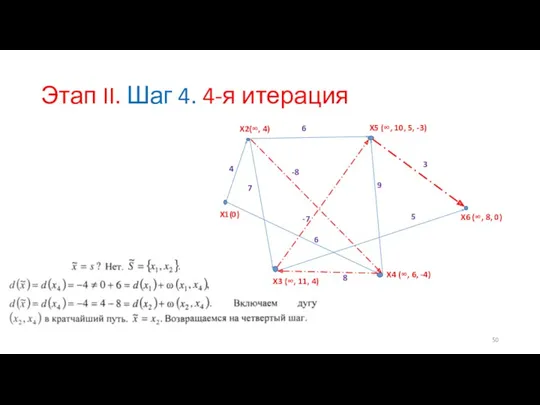
Этап II. Шаг 4. 4-я итерация
Этап II. Шаг 4. 4-я итерация
Этап II. Шаг 4. 5-я итерация
Этап II. Шаг 4. 5-я итерация
Этап II. Шаг 4. 6-я итерация
Да. Задача решена.
Искомый кратчайший путь от
Этап II. Шаг 4. 6-я итерация
Да. Задача решена.
Искомый кратчайший путь от
4. Алгоритм нахождения максимального пути
Замечания
1. Граф G (сеть) должен быть ациклическим.
4. Алгоритм нахождения максимального пути
Замечания
1. Граф G (сеть) должен быть ациклическим.
2) xi следует за xj; xi ∈ Sслед (xj);
3) нет пути между xi и
2) xi следует за xj; xi ∈ Sслед (xj);
3) нет пути между xi и
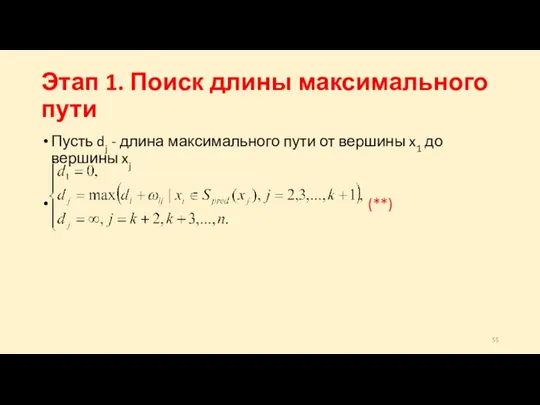
Этап 1. Поиск длины максимального пути
Пусть dj - длина максимального пути от
Этап 1. Поиск длины максимального пути
Пусть dj - длина максимального пути от
Этап 2. Построение максимальных путей
Максимальные пути можно построить методом последовательного возвращения
Этап 2. Построение максимальных путей
Максимальные пути можно построить методом последовательного возвращения
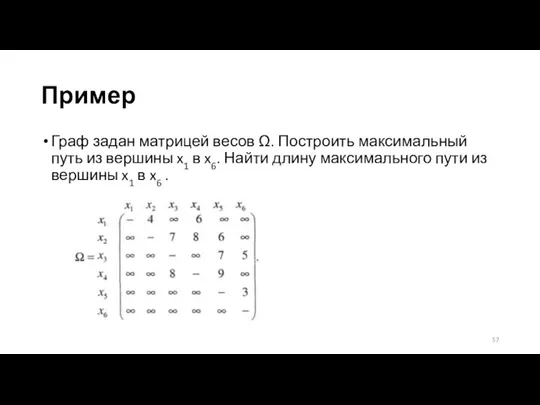
Пример
Граф задан матрицей весов Ω. Построить максимальный путь из вершины x1 в
Пример
Граф задан матрицей весов Ω. Построить максимальный путь из вершины x1 в
6
6
Граф ациклический, упорядочим вершины по алгоритму Фалкерсона
X’3
X’4
Граф ациклический, упорядочим вершины по алгоритму Фалкерсона
X’3
X’4

Этап 1
d1 = 0,
d2 = max (d1 + 4) = 4,
d’3 = max (d1 +
Этап 1
d1 = 0,
d2 = max (d1 + 4) = 4,
d’3 = max (d1 +

Этап 2
x6 : d6 = 30 = d5 + 3 = 27 +3 ⇒
Этап 2
x6 : d6 = 30 = d5 + 3 = 27 +3 ⇒

x’4: d = 20 = d+ 8 = 12 + 8
x’4: d = 20 = d+ 8 = 12 + 8
5. Теорема Форда-Фалкерсона (задача о
максимальном потоке и минимальном разрезе )
Большинство физически
5. Теорема Форда-Фалкерсона (задача о
максимальном потоке и минимальном разрезе )
Большинство физически
Примеры потоков:
- автомобильный транспорт по сети автодорог,
- грузы по железнодорожной
Примеры потоков:
- автомобильный транспорт по сети автодорог,
- грузы по железнодорожной
Замечания
G(S, U, Ω) – связный граф без петель
существует ровно одна вершина
Замечания
G(S, U, Ω) – связный граф без петель
существует ровно одна вершина
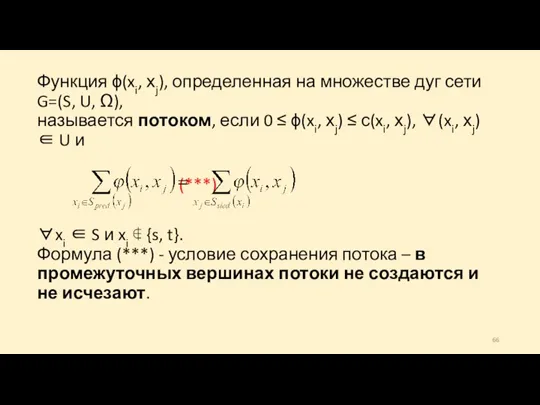
Функция ϕ(xi, хj), определенная на множестве дуг сети G=(S, U, Ω),
называется
Функция ϕ(xi, хj), определенная на множестве дуг сети G=(S, U, Ω), называется
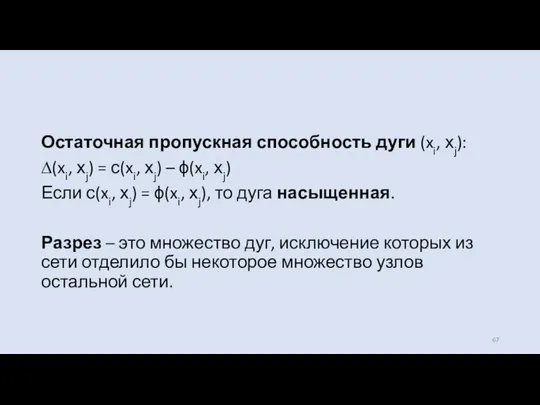
Остаточная пропускная способность дуги (xi, хj):
∆(xi, хj) = с(xi, хj) –
Остаточная пропускная способность дуги (xi, хj):
∆(xi, хj) = с(xi, хj) –
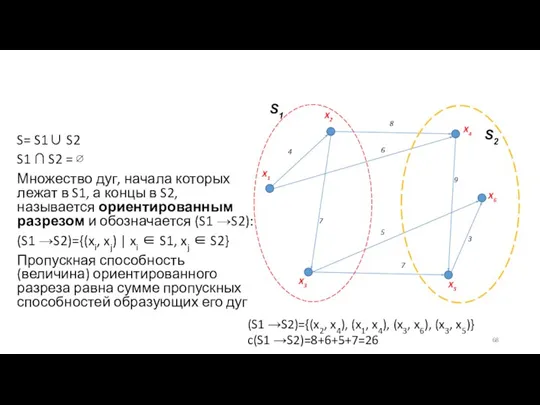
S= S1∪ S2
S1 ∩ S2 = ∅
Множество дуг, начала которых лежат
S= S1∪ S2
S1 ∩ S2 = ∅
Множество дуг, начала которых лежат
Теорема Форда-Фалкерсона
Для любой сети с одним источником и одним стоком величина
Теорема Форда-Фалкерсона
Для любой сети с одним источником и одним стоком величина
Алгоритм
а) ищем любую цепь из истока графа в сток;
б) каждой дуге приписываем возможный
Алгоритм
а) ищем любую цепь из истока графа в сток;
б) каждой дуге приписываем возможный
Пример
Пропускные способности дуг заданы следующей матрицей. Построить минимальный поток из s
Пример
Пропускные способности дуг заданы следующей матрицей. Построить минимальный поток из s
Этап 1
Рассмотрим какой-либо путь от s до t, например,
δ =
Этап 1
Рассмотрим какой-либо путь от s до t, например,
δ =
Рассмотрим путь
δ = min(13; 15 – 12)=3 ⇒ Поток можно
Рассмотрим путь
δ = min(13; 15 – 12)=3 ⇒ Поток можно
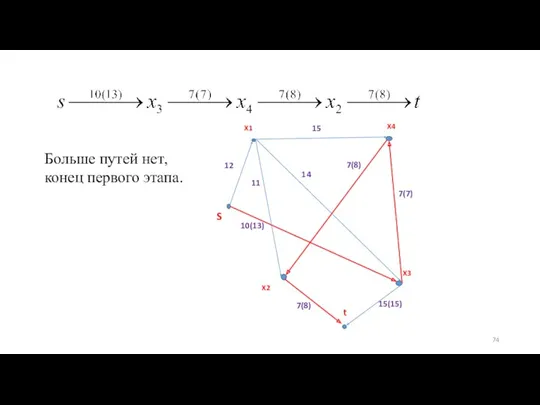
Больше путей нет,
конец первого этапа.
Больше путей нет,
конец первого этапа.
Этап 2
Рассмотрим маршруты, содержащие противоположные дуги.
δ = min(13-10; 14-12; 11; 8-7)=1
Поток
Этап 2
Рассмотрим маршруты, содержащие противоположные дуги.
δ = min(13-10; 14-12; 11; 8-7)=1
Поток
Больше маршрутов нет. Поток максимален.
Проведем разрез вокруг t по насыщенным дугам
Величина
Больше маршрутов нет. Поток максимален.
Проведем разрез вокруг t по насыщенным дугам
Величина
6. Система ПЕРТ
Program (Project) Evaluation and Review Technique (PERT) — метод
6. Система ПЕРТ
Program (Project) Evaluation and Review Technique (PERT) — метод
Некоторые термины
Событие PERT (PERT event) - момент, отмечающий начало или окончание
Некоторые термины
Событие PERT (PERT event) - момент, отмечающий начало или окончание
Последующее событие (successor event) — событие, которое следует за некоторым событием
Последующее событие (successor event) — событие, которое следует за некоторым событием
Проскальзывание или провисание (float, slack) — мера дополнительного времени и ресурсов, доступных для выполнения работы.
Проскальзывание или провисание (float, slack) — мера дополнительного времени и ресурсов, доступных для выполнения работы.
Критический путь (critical path) — длиннейший маршрут на пути от начального
Критический путь (critical path) — длиннейший маршрут на пути от начального
Пример
Студенту университета необходимо прослушать восемь курсов,
которые некоторым образом зависят друг от
Пример
Студенту университета необходимо прослушать восемь курсов, которые некоторым образом зависят друг от
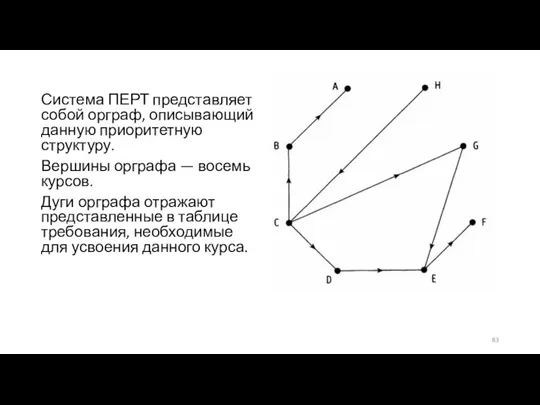
Система ПЕРТ представляет собой орграф, описывающий данную приоритетную структуру.
Вершины орграфа
Система ПЕРТ представляет собой орграф, описывающий данную приоритетную структуру.
Вершины орграфа
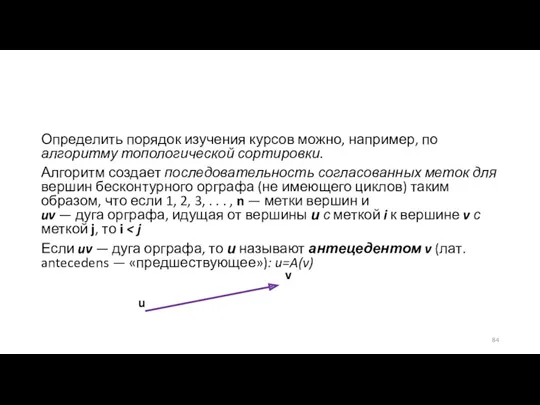
Определить порядок изучения курсов можно, например, по алгоритму топологической сортировки.
Алгоритм
Определить порядок изучения курсов можно, например, по алгоритму топологической сортировки.
Алгоритм
Алгоритм топологической сортировки
Алгоритм генерирует последовательность согласованных меток для вершин бесконтурного орграфа
Алгоритм топологической сортировки
Алгоритм генерирует последовательность согласованных меток для вершин бесконтурного орграфа
Алгоритм успешно присваивает метки вершинам. Каждая вершина получает очередную метку в
Алгоритм успешно присваивает метки вершинам. Каждая вершина получает очередную метку в
Пример
Найдите последовательность меток для орграфа, изображенного на рисунке
Пример
Найдите последовательность меток для орграфа, изображенного на рисунке

Шаг 0
Множество антецедентов:
А(А) = {В},
A(В) = {С},
А(С) = {Н},
Шаг 0
Множество антецедентов:
А(А) = {В},
A(В) = {С},
А(С) = {Н},

Шаг 1
Шаг 1
Шаг 2
Второй проход цикла while. Назначить метку 2 вершине
С и удалить
Шаг 2
Второй проход цикла while. Назначить метку 2 вершине С и удалить
Шаг 3
Шаг 3
Шаг 4
Четвертый проход цикла while. Мы снова стоим перед
выбором. Назначим метку
Шаг 4
Четвертый проход цикла while. Мы снова стоим перед выбором. Назначим метку
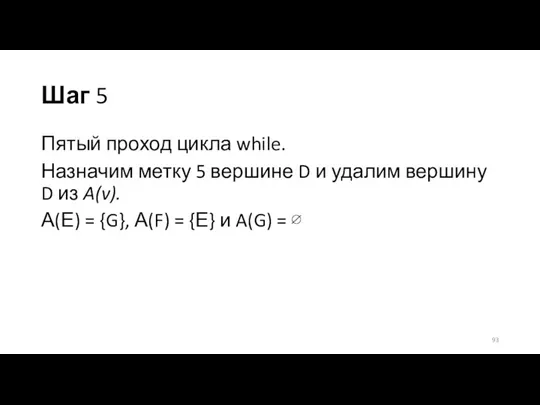
Шаг 5
Пятый проход цикла while.
Назначим метку 5 вершине D и
Шаг 5
Пятый проход цикла while.
Назначим метку 5 вершине D и
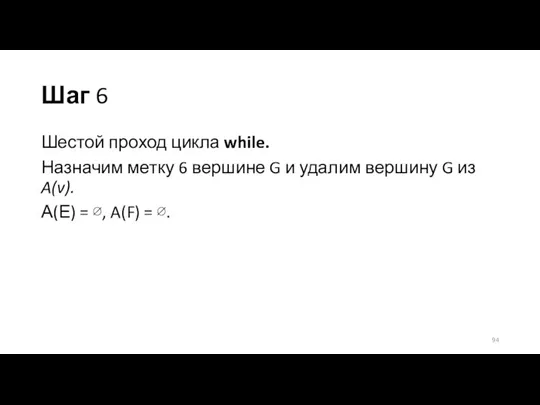
Шаг 6
Шестой проход цикла while.
Назначим метку 6 вершине G и
Шаг 6
Шестой проход цикла while.
Назначим метку 6 вершине G и
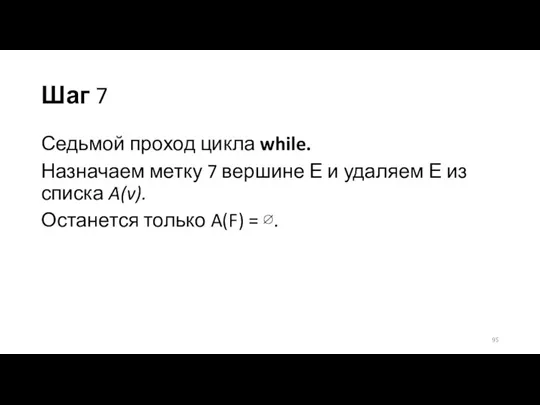
Шаг 7
Седьмой проход цикла while.
Назначаем метку 7 вершине Е
Шаг 7
Седьмой проход цикла while.
Назначаем метку 7 вершине Е
Шаг 8
Последний проход цикла while. Назначаем метку 8 вершине F.
Получили один
Шаг 8
Последний проход цикла while. Назначаем метку 8 вершине F.
Получили один
Задача
Приведен список действий по приготовлению блюда из мяса цыпленка с расставленными
Задача
Приведен список действий по приготовлению блюда из мяса цыпленка с расставленными
7. Коммуникационные сети
Коммуникационная сеть - это соединение определенным образом участвующих в
7. Коммуникационные сети
Коммуникационная сеть - это соединение определенным образом участвующих в
Простой вид открытой коммуникационной сети – линейная (змея),
А и Б
Простой вид открытой коммуникационной сети – линейная (змея),
А и Б
Звезда
А – центральный узел (руководитель)
исполнители Б, В, Г
Звену А легко поддерживать
Звезда
А – центральный узел (руководитель)
исполнители Б, В, Г
Звену А легко поддерживать
Шпора
Характерна для крупных управленческих структур.
Центральное звено А не в состоянии вырабатывать
Шпора
Характерна для крупных управленческих структур.
Центральное звено А не в состоянии вырабатывать
Палатка
Характерны для крупных многопрофильных функциональных структур
Наряду с вертикальными коммуникационными каналами
Палатка
Характерны для крупных многопрофильных функциональных структур
Наряду с вертикальными коммуникационными каналами
В «палатке» допускается один уровень горизонтальной коммуникации - между вторыми лицами;
В «палатке» допускается один уровень горизонтальной коммуникации - между вторыми лицами;
Например, на основе предварительной договоренности субъект Д может направлять информацию для
Например, на основе предварительной договоренности субъект Д может направлять информацию для
В целом открытые коммуникационные структуры присущи бюрократическим структурам (жесткое подчинение одних
В целом открытые коммуникационные структуры присущи бюрократическим структурам (жесткое подчинение одних
Круг
Круг характерен для структур с благоприятным морально-психологическим климатом.
Помогает объединять людей,
Круг
Круг характерен для структур с благоприятным морально-психологическим климатом.
Помогает объединять людей,
Соты (комбинированный вид)
На крупных предприятиях творческие группы могут быть связаны друг
Соты (комбинированный вид)
На крупных предприятиях творческие группы могут быть связаны друг
Рассмотрим пример коммуникационной сети - модель компьютерной сети - ориентированный граф
Вершины
Рассмотрим пример коммуникационной сети - модель компьютерной сети - ориентированный граф
Вершины

Пример простой сети из семи узлов
Рис. 1. Сеть из семи узлов
Пример простой сети из семи узлов
Рис. 1. Сеть из семи узлов
После ввода в действие сети возникает вопрос: как
передавать сообщения между несмежными
После ввода в действие сети возникает вопрос: как передавать сообщения между несмежными
Процедура динамической маршрутизации постоянно корректирует пропускную способность линий с учетом потребности.
Процедура динамической маршрутизации постоянно корректирует пропускную способность линий с учетом потребности.
Каждый узел сети на рис. 1 «прогоняет» алгоритм Дейкстры для определения
Каждый узел сети на рис. 1 «прогоняет» алгоритм Дейкстры для определения
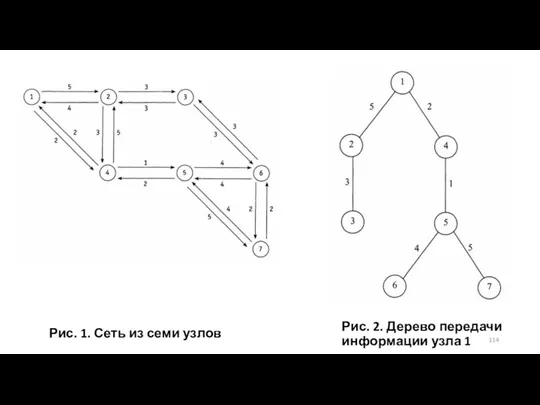
Рис. 1. Сеть из семи узлов
Рис. 2. Дерево передачи информации узла
Рис. 1. Сеть из семи узлов
Рис. 2. Дерево передачи информации узла
Для передачи сообщений любому узлу требуется таблица, в которой указаны ближайшие
Для передачи сообщений любому узлу требуется таблица, в которой указаны ближайшие
З а д а ч а 1. Используя алгоритм Дейкстры, найти
З а д а ч а 1. Используя алгоритм Дейкстры, найти
Шаг 0
Начинаем от вершины 2, отмечаем ее и используем первую строку
Шаг 0
Начинаем от вершины 2, отмечаем ее и используем первую строку
Шаг 1
Ближайшие к вершине 2 – это вершины 3 и 4.
Отметим
Шаг 1
Ближайшие к вершине 2 – это вершины 3 и 4.
Отметим
Шаг 2
Из оставшихся неотмеченными, вершина 5 находится
ближе всех к 1.
Так как
Шаг 2
Из оставшихся неотмеченными, вершина 5 находится
ближе всех к 1.
Так как
![Шаг 3 Отметим вершину 5 и подправим значения d[v]. Можно](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/170468/slide-119.jpg)
Шаг 3
Отметим вершину 5 и подправим значения d[v].
Можно дойти и
Шаг 3
Отметим вершину 5 и подправим значения d[v].
Можно дойти и

Шаг 4
Отметим вершину 1
Из неотмеченных вершин минимальное значение соответствует вершине
Шаг 4
Отметим вершину 1
Из неотмеченных вершин минимальное значение соответствует вершине
Шаг 5
Отметим вершину 6
Из неотмеченных вершин минимальное осталась только вершина
Шаг 5
Отметим вершину 6
Из неотмеченных вершин минимальное осталась только вершина
Шаг 6
Отметим последнюю
вершину 7
Шаг 6
Отметим последнюю
вершину 7
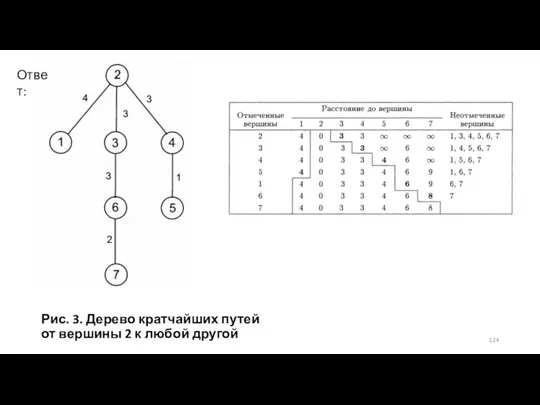
Рис. 3. Дерево кратчайших путей от вершины 2 к любой другой
Ответ:
Рис. 3. Дерево кратчайших путей от вершины 2 к любой другой
Ответ:
Ответ:
таблица маршрутов для узла 2
Ответ:
таблица маршрутов для узла 2
Задача 2. Предположим, что временная задержка передачи от узла 2 к
Задача 2. Предположим, что временная задержка передачи от узла 2 к
Перезапустим алгоритм Дейкстры
Рис. 4. Дерево кратчайших путей от узла 2
таблица
Перезапустим алгоритм Дейкстры
Рис. 4. Дерево кратчайших путей от узла 2
таблица
Задача 3. Какими будут дерево кратчайших путей и таблица маршрутов для
Задача 3. Какими будут дерево кратчайших путей и таблица маршрутов для
Решение.
Поскольку линия 5 → 6 не задействована при передаче информации
Решение.
Поскольку линия 5 → 6 не задействована при передаче информации
Что касается узла 1, то мы можем ограничиться поиском кратчайшего пути
Что касается узла 1, то мы можем ограничиться поиском кратчайшего пути
 Возведение в степень произведения и степени
Возведение в степень произведения и степени Свойства функции y=cos-x и ее график
Свойства функции y=cos-x и ее график Елементи теорії виміру. Шкали виміру. Лекція 6. Тема 3
Елементи теорії виміру. Шкали виміру. Лекція 6. Тема 3 Закрепление + - 3. Сравнение отрезков. 1 класс Школа России
Закрепление + - 3. Сравнение отрезков. 1 класс Школа России Степени и корни. Свойства степеней
Степени и корни. Свойства степеней Софья Ковалевская
Софья Ковалевская Числа 1 - 4
Числа 1 - 4 Метрология. Введение. Структура дисциплины
Метрология. Введение. Структура дисциплины grafy1
grafy1 Число и цифра 4.
Число и цифра 4. Тренажёр умножения на 2
Тренажёр умножения на 2 Статистическое распределение выборки и его основные числовые характеристики
Статистическое распределение выборки и его основные числовые характеристики Раскрытие скобок
Раскрытие скобок Медиа-сопровождение к уроку математики Число 9. Цифра 9
Медиа-сопровождение к уроку математики Число 9. Цифра 9 Урок математики для 2 класса Трёхзначные числа
Урок математики для 2 класса Трёхзначные числа НОД по математическому развитию в подготовительной группе.
НОД по математическому развитию в подготовительной группе. Решение обыкновенных дифференциальных уравнений (краевая задача)
Решение обыкновенных дифференциальных уравнений (краевая задача) Раскрытие скобок
Раскрытие скобок Цікаві факти з історії геометрії
Цікаві факти з історії геометрії Grafika komputerowa
Grafika komputerowa Тетраэдр и параллелепипед
Тетраэдр и параллелепипед Формула пути. Решение задач на движение
Формула пути. Решение задач на движение Тест по теме: Тетраэдр и параллелепипед. Теория
Тест по теме: Тетраэдр и параллелепипед. Теория Система подготовки к ЕГЭ
Система подготовки к ЕГЭ Марковские системы массового обслуживания
Марковские системы массового обслуживания Логарифмы вокруг нас. История логарифмов
Логарифмы вокруг нас. История логарифмов Три точки зрения на геометрию вселенной
Три точки зрения на геометрию вселенной Презентация к уроку математики на тему: Случаи сложения вида 26+4. Переход через разряд 2 класс
Презентация к уроку математики на тему: Случаи сложения вида 26+4. Переход через разряд 2 класс