- Системы ходов. Виды теодолитных ходов

Содержание
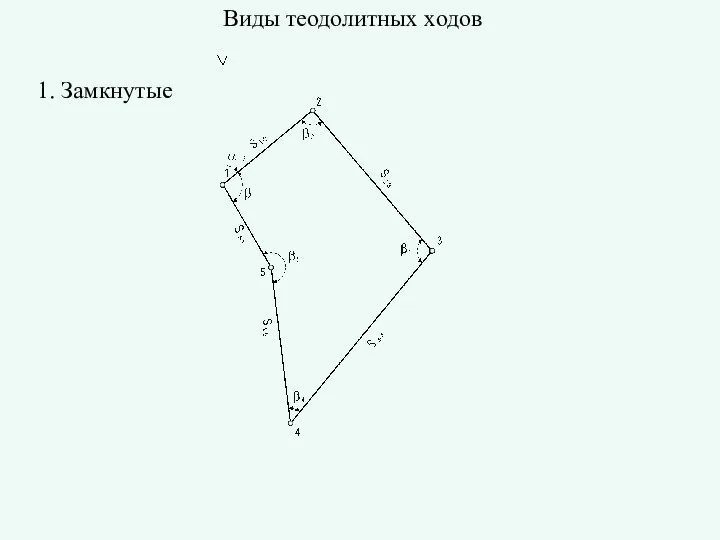
- 2. Виды теодолитных ходов 1. Замкнутые
- 3. Измерены Горизонтальные углы β, магнитный азимут Am0. Расстояния по линиям l Вертикальные углы ν или превышения
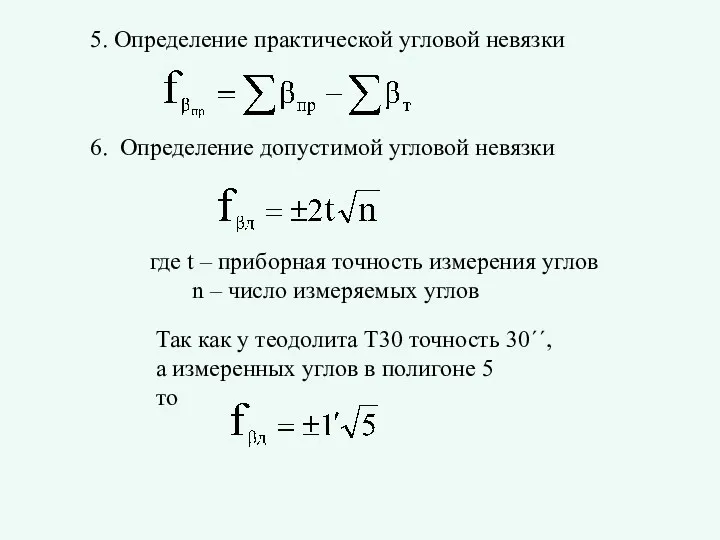
- 4. 1) Вычисляют измеренную сумму внутренних углов 2) Теоретическую сумму внутренних углов 3) Невязку углов по ходу
- 5. 7) Исправляют углы β за невязку углов 8) Вычисляют дирекционный угол α0 начального направления 9) Дирекционные
- 6. 11) Вычисляют приращения координат на всех линиях 12) Невязки по x и y для линий замкнутого
- 7. 15) Исправляют приращения координат за невязки 16) Вычисляют прямоугольные координаты точек ☺ Обработка теодолитного хода
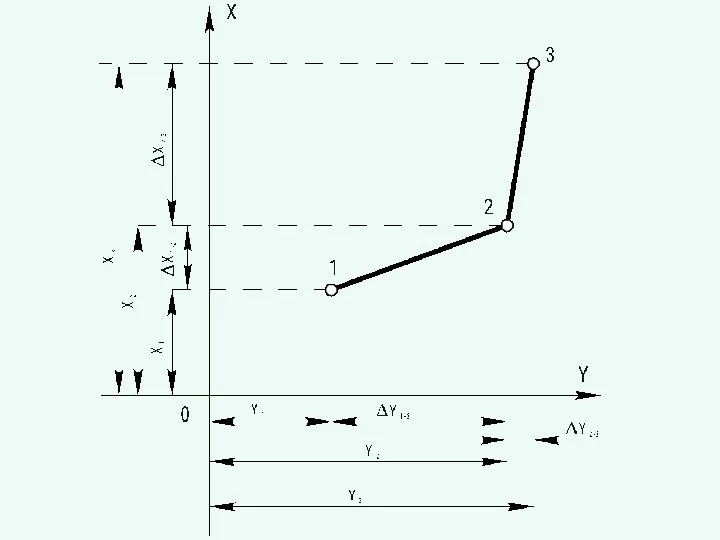
- 8. Определение плановых координат точек на местности XB = XA + ΔXAB YB = YA + ΔYAB
- 10. Нарисовать схему теодолитного хода и нанести на неё значения измеренных горизонтальных углов и вычисленных горизонтальных проложений
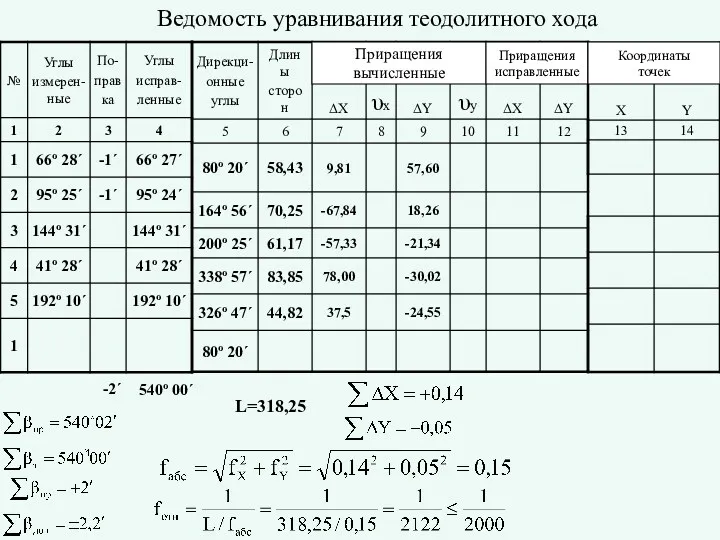
- 11. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода
- 12. 3. Просуммировать измеренные горизонтальные углы 4. Определить теоретическую сумму углов
- 13. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода
- 15. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода
- 16. 7. Определение значений поправок в измеренные углы 8. Вычисление исправленных горизонтальных углов 9. Выписать значение исходного
- 17. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´
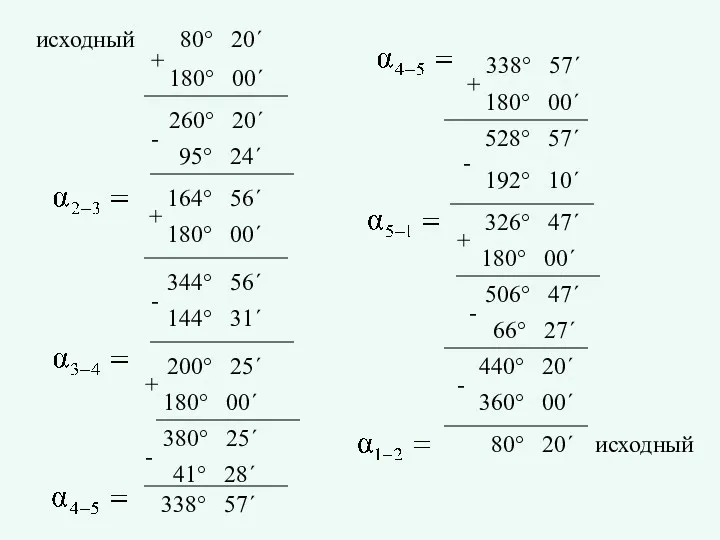
- 18. Правые по ходу углы Левые по ходу углы 10. Вычисление значений остальных дирекционных углов
- 20. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´
- 21. 11. Определение вычисленных приращений координат ΔX = S cos α ΔY = S sin α
- 22. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´
- 23. 12. Определение сумм ΔX и ΔY, при этом Определение абсолютной и относительной линейных невязок теодолитного хода
- 24. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´ L=318,25
- 25. Увязка приращений координат Необходимо разбросать невязки по ΔX и ΔY пропорционально длинам сторон хода и с
- 26. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´ L=318,25
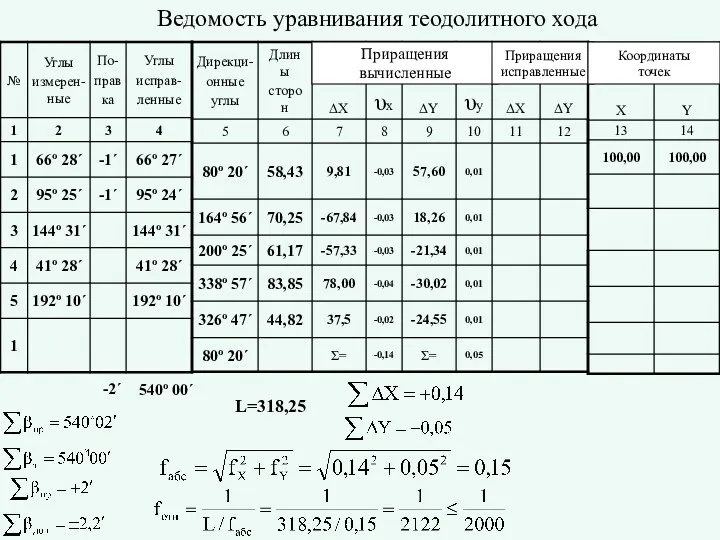
- 27. 16. Вычисление уравненных приращений координат 17. Вычисление координат точек полигона
- 29. Скачать презентацию
Виды теодолитных ходов
1. Замкнутые
Виды теодолитных ходов
1. Замкнутые

Измерены
Горизонтальные углы β, магнитный азимут Am0.
Расстояния по линиям l
Вертикальные углы
Измерены
Горизонтальные углы β, магнитный азимут Am0.
Расстояния по линиям l
Вертикальные углы
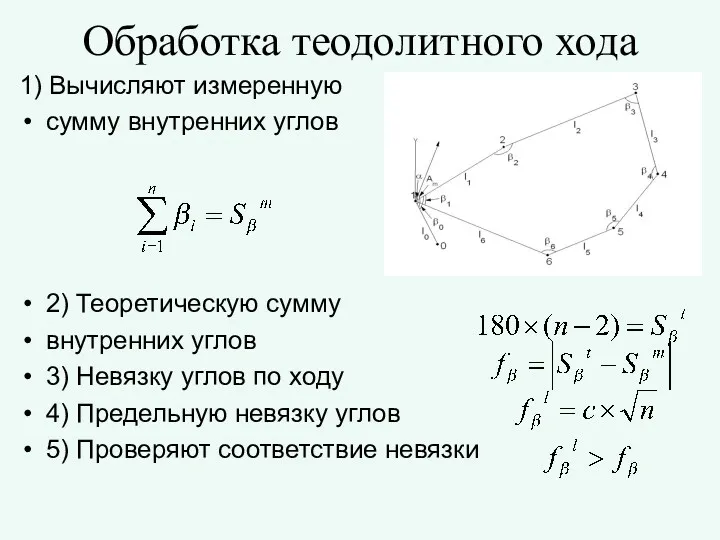
1) Вычисляют измеренную
сумму внутренних углов
2) Теоретическую сумму
внутренних углов
3) Невязку
1) Вычисляют измеренную
сумму внутренних углов
2) Теоретическую сумму
внутренних углов
3) Невязку
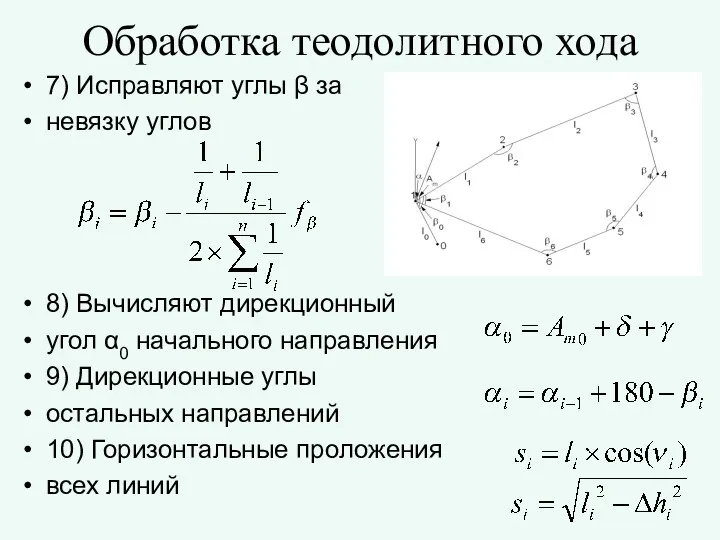
7) Исправляют углы β за
невязку углов
8) Вычисляют дирекционный
угол α0 начального
7) Исправляют углы β за
невязку углов
8) Вычисляют дирекционный
угол α0 начального
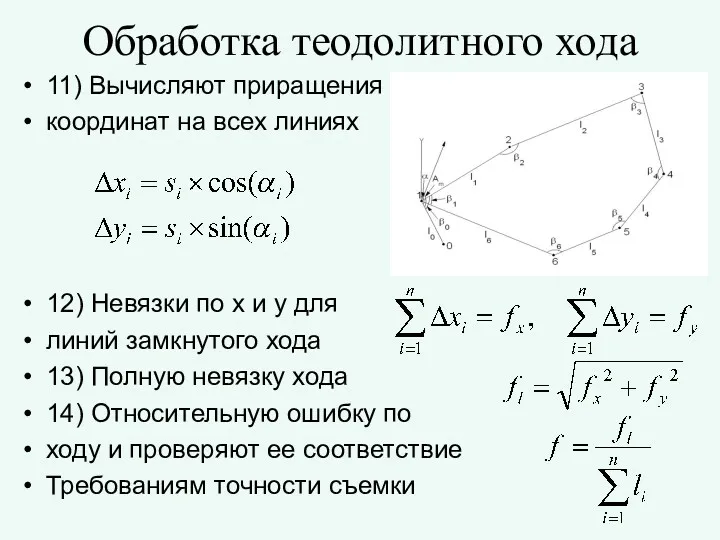
11) Вычисляют приращения
координат на всех линиях
12) Невязки по x и y
11) Вычисляют приращения
координат на всех линиях
12) Невязки по x и y
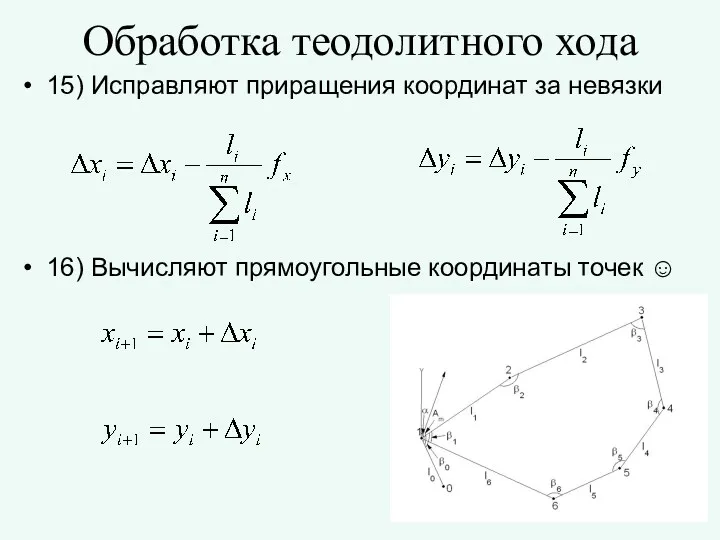
15) Исправляют приращения координат за невязки
16) Вычисляют прямоугольные координаты точек ☺
Обработка
15) Исправляют приращения координат за невязки
16) Вычисляют прямоугольные координаты точек ☺
Обработка

Определение плановых
координат точек
на местности
XB = XA + ΔXAB
YB = YA +
Определение плановых
координат точек
на местности
XB = XA + ΔXAB
YB = YA +
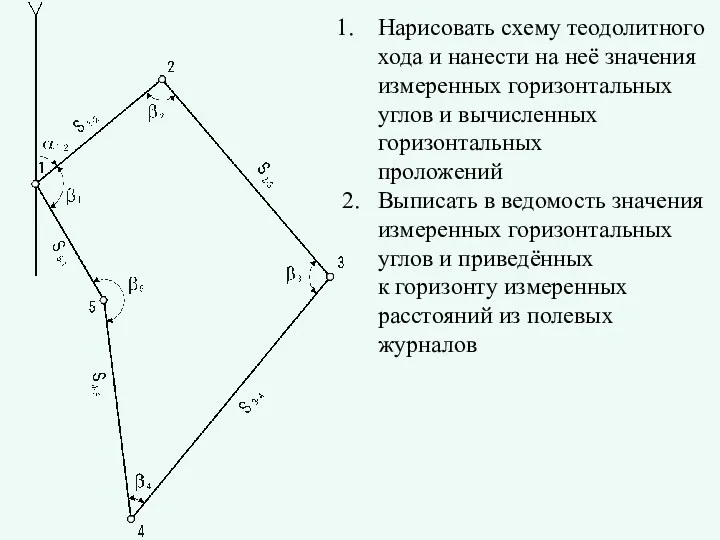
Нарисовать схему теодолитного
хода и нанести на неё значения
измеренных горизонтальных
Нарисовать схему теодолитного
хода и нанести на неё значения
измеренных горизонтальных

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
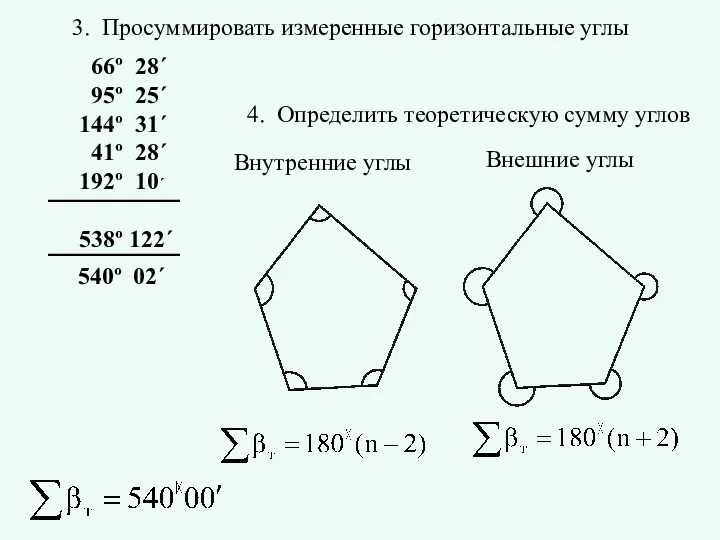
3. Просуммировать измеренные горизонтальные углы
4. Определить теоретическую сумму углов
3. Просуммировать измеренные горизонтальные углы
4. Определить теоретическую сумму углов

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
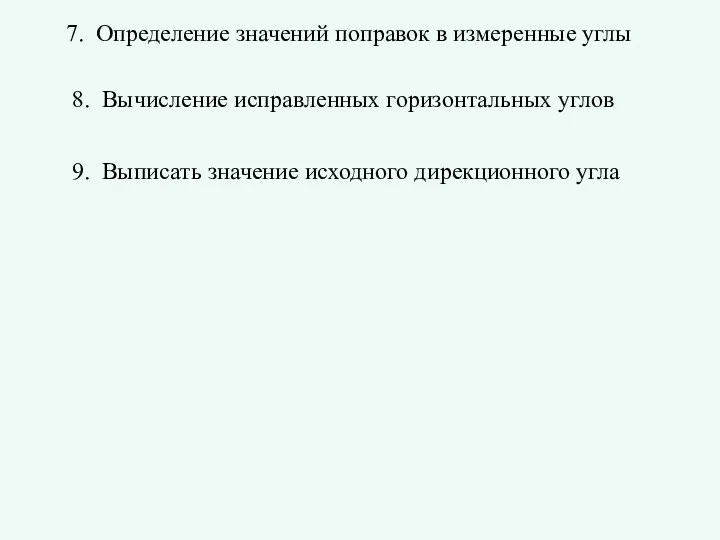
7. Определение значений поправок в измеренные углы
8. Вычисление исправленных горизонтальных углов
9.
7. Определение значений поправок в измеренные углы
8. Вычисление исправленных горизонтальных углов
9.

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
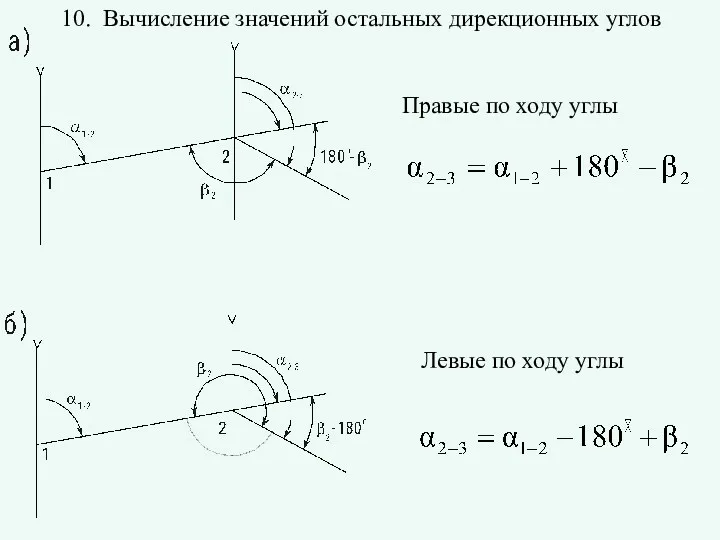
Правые по ходу углы
Левые по ходу углы
10. Вычисление значений остальных дирекционных
Правые по ходу углы
Левые по ходу углы
10. Вычисление значений остальных дирекционных

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
11. Определение вычисленных приращений координат
ΔX = S cos α
ΔY = S
11. Определение вычисленных приращений координат
ΔX = S cos α
ΔY = S

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
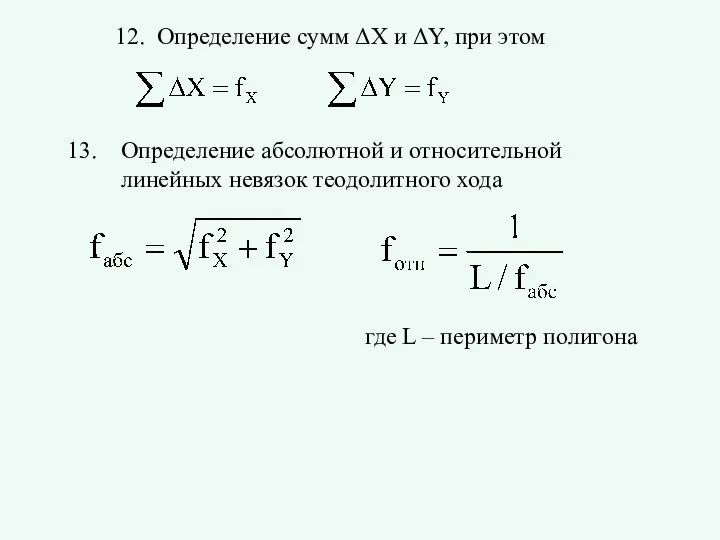
12. Определение сумм ΔX и ΔY, при этом
Определение абсолютной и относительной
12. Определение сумм ΔX и ΔY, при этом
Определение абсолютной и относительной
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
L=318,25
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
L=318,25
Увязка приращений координат
Необходимо разбросать невязки по ΔX и ΔY
пропорционально длинам сторон
Необходимо разбросать невязки по ΔX и ΔY
пропорционально длинам сторон
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
L=318,25
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
L=318,25
16. Вычисление уравненных приращений координат
17. Вычисление координат точек полигона
16. Вычисление уравненных приращений координат
17. Вычисление координат точек полигона
 Деление десятичной дроби на 10, 100, 1000
Деление десятичной дроби на 10, 100, 1000 Системи рівнянь другого степеня
Системи рівнянь другого степеня Методическая разработка урока по математике 3 класс
Методическая разработка урока по математике 3 класс Решение квадратных уравнений с применением теоремы Виета
Решение квадратных уравнений с применением теоремы Виета Капельки
Капельки Сложение и вычитание десятичных дробей
Сложение и вычитание десятичных дробей Сложение числа 2 с однозначными числами 1 класс
Сложение числа 2 с однозначными числами 1 класс Умножение числа на сумму. (4 класс)
Умножение числа на сумму. (4 класс) Задачи на смекалку
Задачи на смекалку Линейные операции. Проекция вектора на ось. Скалярное произведение векторов. Базис векторов. Тема 5
Линейные операции. Проекция вектора на ось. Скалярное произведение векторов. Базис векторов. Тема 5 Десятичные дроби произвольного знака
Десятичные дроби произвольного знака Свойства арифметического корня. 9 класс
Свойства арифметического корня. 9 класс Векторы. Действия над векторами. Декартова система координат
Векторы. Действия над векторами. Декартова система координат Математическая игра Колесо фортуны
Математическая игра Колесо фортуны Осевая и центральная симметрия
Осевая и центральная симметрия Системы двух линейных уравнений с двумя переменными. Алгебра. 7 класс
Системы двух линейных уравнений с двумя переменными. Алгебра. 7 класс Ломаные и многоугольники
Ломаные и многоугольники Решение уравнения
Решение уравнения Конспект урока математики в 3 классе ТЕКСТОВЫЕ ЗАДАЧИ В ТРИ ДЕЙСТВИЯ
Конспект урока математики в 3 классе ТЕКСТОВЫЕ ЗАДАЧИ В ТРИ ДЕЙСТВИЯ Линейная функция и ее график
Линейная функция и ее график Таблица умножения и деления на 6
Таблица умножения и деления на 6 Математика и животный мир
Математика и животный мир Задача и алгоритм Прима
Задача и алгоритм Прима Письменное умножение на двузначное число
Письменное умножение на двузначное число Презентация - тренажёр для 1 класса Прибавление и вычитание числа 2.
Презентация - тренажёр для 1 класса Прибавление и вычитание числа 2. Цилиндр. Виды цилиндров
Цилиндр. Виды цилиндров УМК Планета Знаний
УМК Планета Знаний Вычитание вида 11-
Вычитание вида 11-