- Теория графов. Дерево решений

Содержание
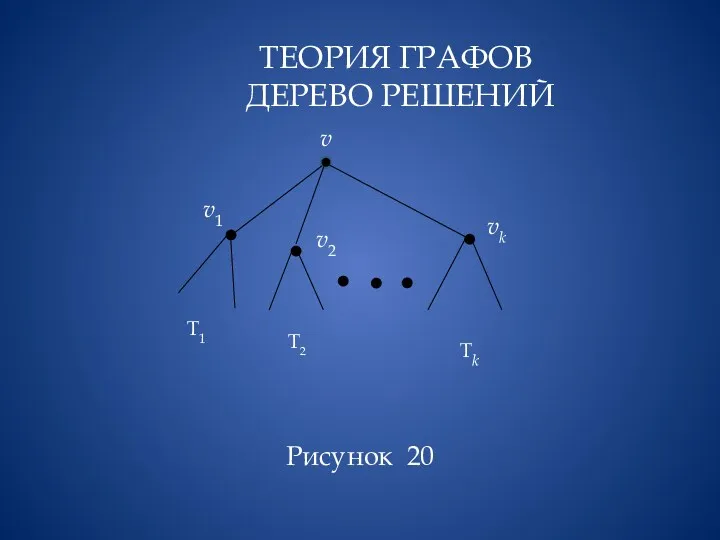
- 2. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Рисунок 20 vk v1 v v2 T1 Tk T2
- 3. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Вершины v1, ..., vk графа Т − это сыновья корня v (рис.
- 4. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Каждой вершине двоичного дерева с корнем соответствует не более, чем два поддерева,
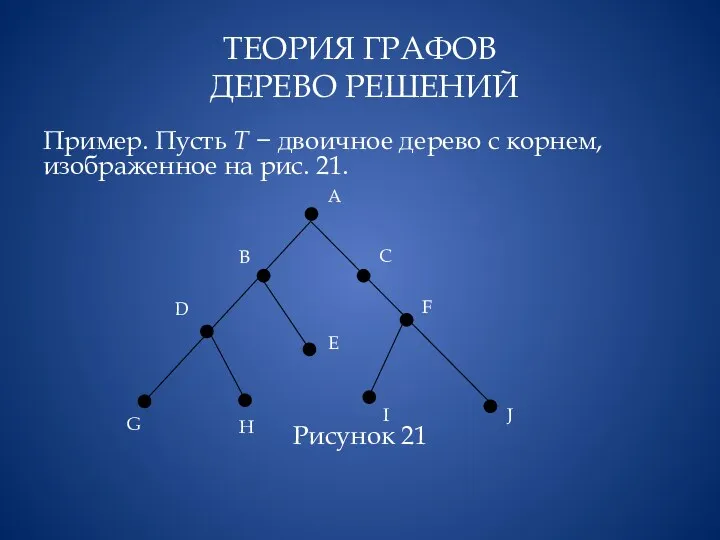
- 5. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Пример. Пусть Т − двоичное дерево с корнем, изображенное на рис. 21.
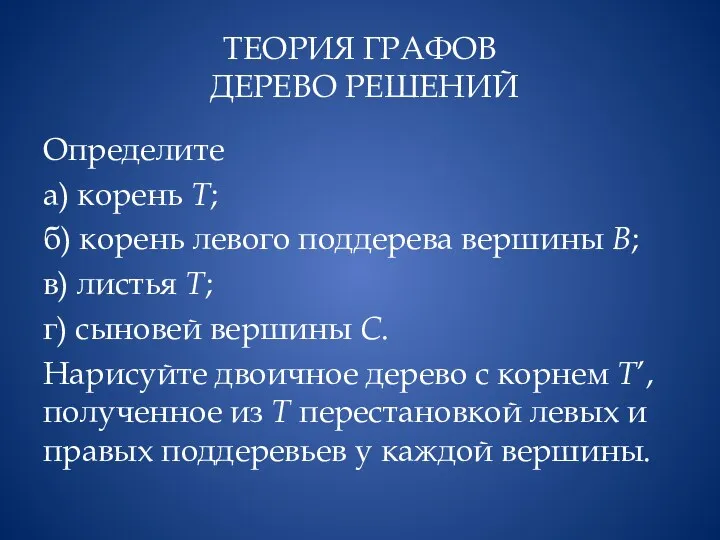
- 6. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Определите а) корень Т; б) корень левого поддерева вершины B; в) листья
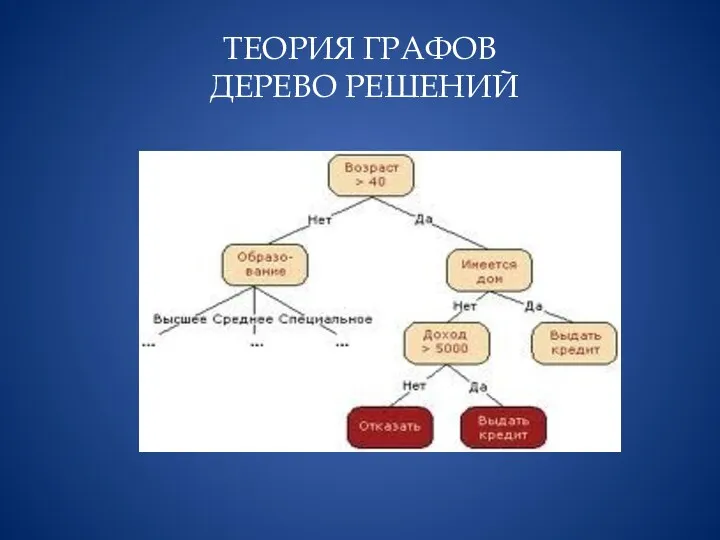
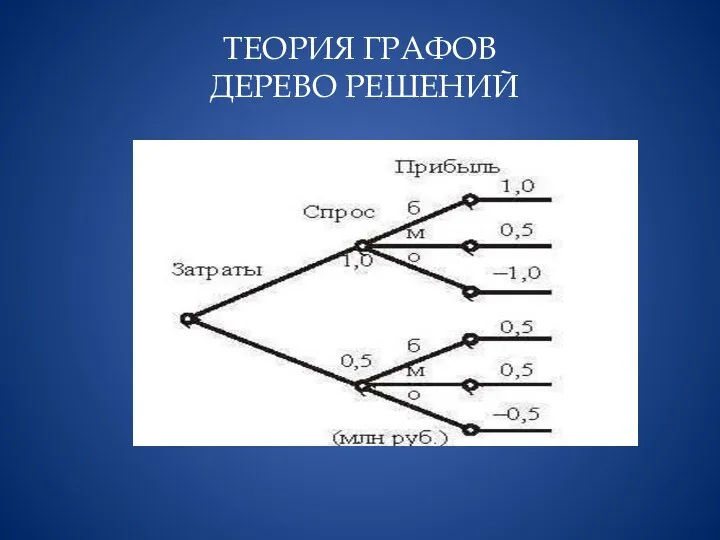
- 7. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Дерево решений − используется в области анализа данных для прогнозных моделей. Структура
- 8. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ
- 9. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ
- 10. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ
- 11. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Метод поиска с деревом решений состоит в разбиении начальной задачи Р0 на
- 12. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Выражение разрешить понимаем так: найти оптимальное решение; показать, что значение оптимального решения
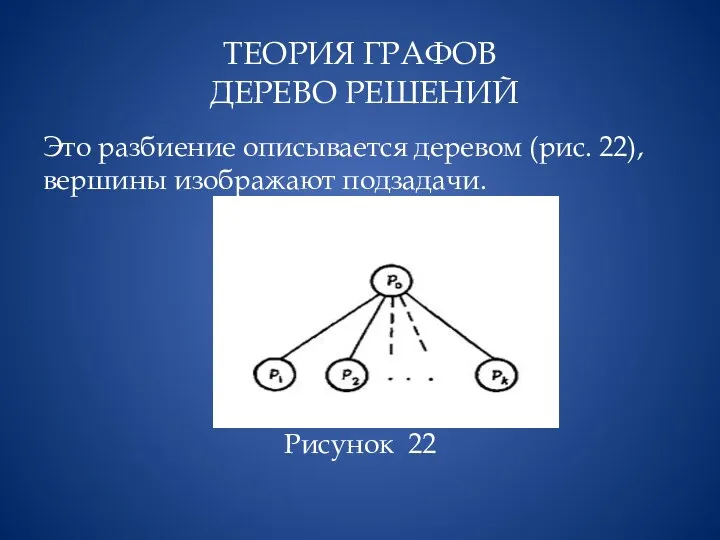
- 13. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Это разбиение описывается деревом (рис. 22), вершины изображают подзадачи. Рисунок 22
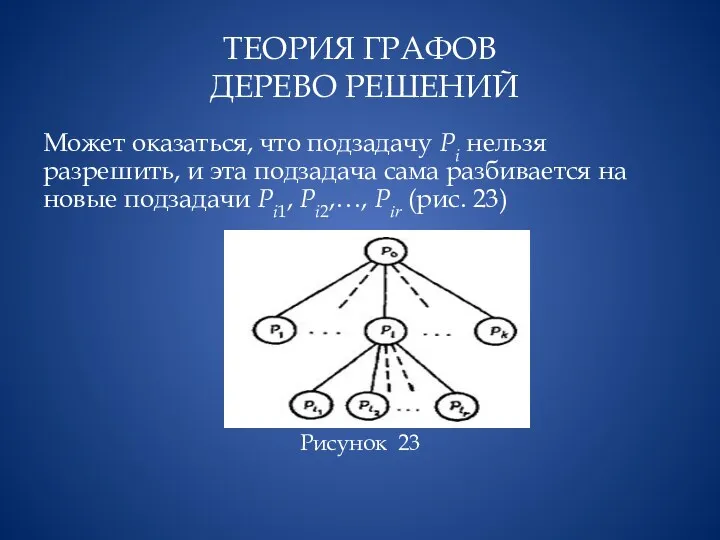
- 14. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Может оказаться, что подзадачу Рi нельзя разрешить, и эта подзадача сама разбивается
- 15. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Это разбиение, называемое ветвлением, повторяется для каждой подзадачи, которая не может быть
- 16. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Если поиск исчерпан, то очевидно, что множество подзадач, на которые разбита задача,
- 17. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Любая подзадача, представляемая висячей вершиной и не поддающаяся разрешению, может быть в
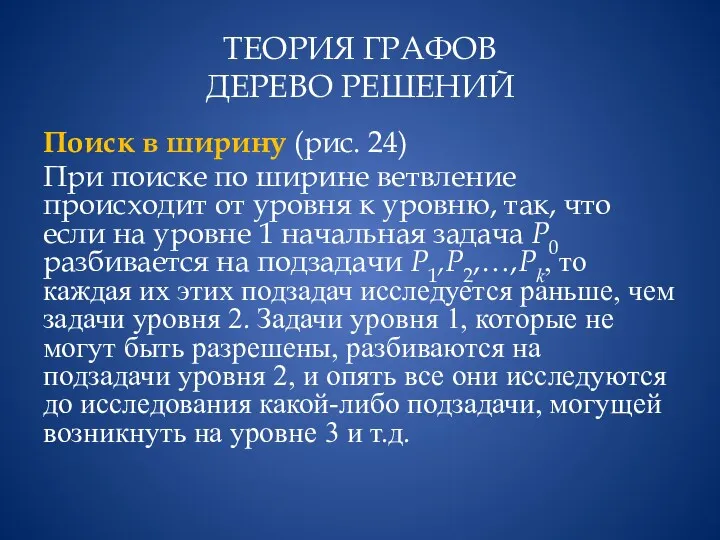
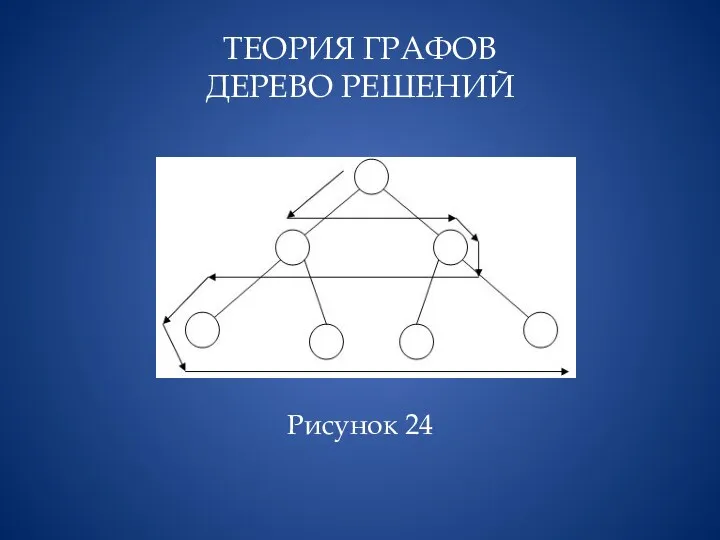
- 18. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Поиск в ширину (рис. 24) При поиске по ширине ветвление происходит от
- 19. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Рисунок 24
- 20. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Т.е. на каждой следующей итерации своей работы он расползается вширь по ребрам
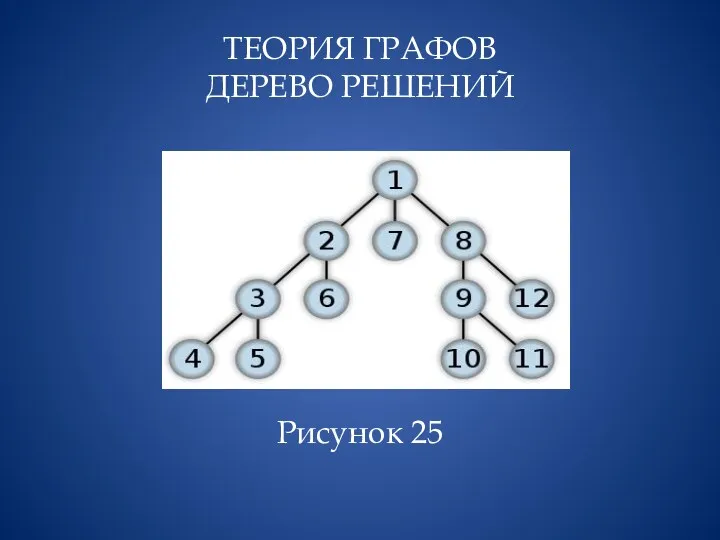
- 21. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Поиск в глубину (рис. 25) Этот алгоритм делает следующее: поиск в глубину
- 22. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Рисунок 25
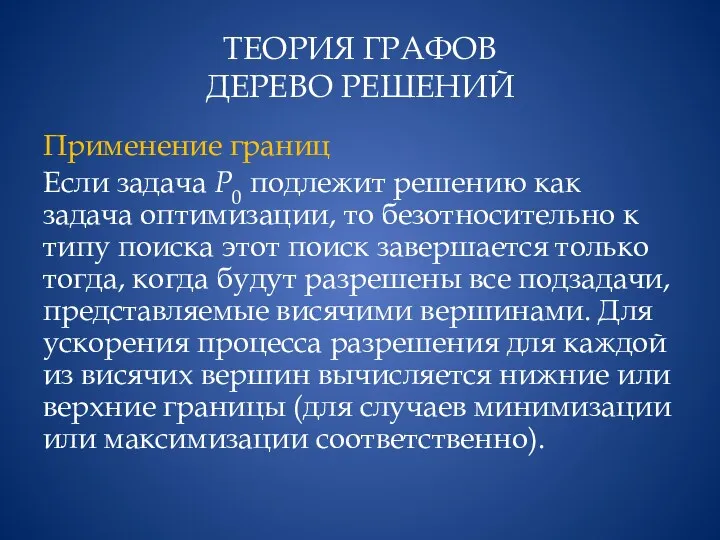
- 23. ТЕОРИЯ ГРАФОВ ДЕРЕВО РЕШЕНИЙ Применение границ Если задача Р0 подлежит решению как задача оптимизации, то безотносительно
- 25. Скачать презентацию
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Рисунок 20
vk
v1
v
v2
T1
Tk
T2
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Рисунок 20
vk
v1
v
v2
T1
Tk
T2
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Вершины v1, ..., vk графа Т −
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Вершины v1, ..., vk графа Т −
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Каждой вершине двоичного дерева с корнем соответствует
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Каждой вершине двоичного дерева с корнем соответствует
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Пример. Пусть Т − двоичное дерево с
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Пример. Пусть Т − двоичное дерево с
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Определите
а) корень Т;
б) корень левого поддерева вершины
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Определите
а) корень Т;
б) корень левого поддерева вершины
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Дерево решений − используется в области анализа
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Дерево решений − используется в области анализа
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Метод поиска с деревом решений состоит в
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Метод поиска с деревом решений состоит в
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Выражение разрешить понимаем так:
найти оптимальное решение;
показать, что
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Выражение разрешить понимаем так:
найти оптимальное решение;
показать, что
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Это разбиение описывается деревом (рис. 22), вершины изображают
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Это разбиение описывается деревом (рис. 22), вершины изображают
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Может оказаться, что подзадачу Рi нельзя разрешить, и
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Может оказаться, что подзадачу Рi нельзя разрешить, и
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Это разбиение, называемое ветвлением, повторяется для каждой подзадачи,
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Это разбиение, называемое ветвлением, повторяется для каждой подзадачи,
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Если поиск исчерпан, то очевидно, что множество подзадач,
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Если поиск исчерпан, то очевидно, что множество подзадач,
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Любая подзадача, представляемая висячей вершиной и не поддающаяся
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Любая подзадача, представляемая висячей вершиной и не поддающаяся
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Поиск в ширину (рис. 24)
При поиске по ширине ветвление
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Поиск в ширину (рис. 24)
При поиске по ширине ветвление
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Рисунок 24
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Рисунок 24
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Т.е. на каждой следующей итерации своей работы он расползается
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Т.е. на каждой следующей итерации своей работы он расползается
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Поиск в глубину (рис. 25)
Этот алгоритм делает следующее:
поиск
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Поиск в глубину (рис. 25)
Этот алгоритм делает следующее:
поиск
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Рисунок 25
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Рисунок 25
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Применение границ
Если задача Р0 подлежит решению как задача оптимизации,
ТЕОРИЯ ГРАФОВ
ДЕРЕВО РЕШЕНИЙ
Применение границ
Если задача Р0 подлежит решению как задача оптимизации,
 Длина окружности. Площадь круга
Длина окружности. Площадь круга Числа от 1 до 9.
Числа от 1 до 9. Использование технологий, методов и приёмов интегрированных уроков для познавательной активности на уроках математики
Использование технологий, методов и приёмов интегрированных уроков для познавательной активности на уроках математики Показательные неравенства
Показательные неравенства Скобки в числовом выражении
Скобки в числовом выражении Понятие логарифма, основные свойства логарифмов
Понятие логарифма, основные свойства логарифмов Задачи на кратное сравнение
Задачи на кратное сравнение 20231011_8_klass_pryamougolnik._ploshchad_pryamougolnika
20231011_8_klass_pryamougolnik._ploshchad_pryamougolnika Геометрические фигуры
Геометрические фигуры Основы математической статистики. Лекция 3
Основы математической статистики. Лекция 3 Занимательная математика
Занимательная математика Великие математики и их открытия
Великие математики и их открытия Решение задач на нахождение площади фигур по готовым чертежам
Решение задач на нахождение площади фигур по готовым чертежам Сравнение дробей. Урок изучения нового материала в 5 классе
Сравнение дробей. Урок изучения нового материала в 5 классе Сложение рациональных чисел
Сложение рациональных чисел Родительское собрание №1. 2021-2022 учебный год
Родительское собрание №1. 2021-2022 учебный год Листая страницы истории (конференция)
Листая страницы истории (конференция) Практикум № 7 по решению стереометрических задач
Практикум № 7 по решению стереометрических задач Тела вращения. 11 класс
Тела вращения. 11 класс Цилиндр. Конус. Усеченный конус. Основание, высота, боковая поверхность, образующая, развертка
Цилиндр. Конус. Усеченный конус. Основание, высота, боковая поверхность, образующая, развертка Пропорция. Урок математики в 6 классе
Пропорция. Урок математики в 6 классе Открытый урок по математике. Тема:Задача.1 класс. Школа 2100
Открытый урок по математике. Тема:Задача.1 класс. Школа 2100 мастер класс по ФЭМП на тему: Обучению решению арифметических задач.
мастер класс по ФЭМП на тему: Обучению решению арифметических задач. Совместные действия с десятичными дробями. 6 класс
Совместные действия с десятичными дробями. 6 класс Комбинаторные методы обработки информации
Комбинаторные методы обработки информации Презентация к уроку математикиАрифметические действия над числами урок 32 программа Школа 2100
Презентация к уроку математикиАрифметические действия над числами урок 32 программа Школа 2100 Письменное умножение на двузначное число
Письменное умножение на двузначное число Метод дерева решений
Метод дерева решений