- Theory without practice is empty, practice without theory is blind

Содержание
- 2. One practical task: image matching - How to find correspondence between pixels of two images of
- 3. Simplest approach: correlation Slightly more advanced: cross-correlation function calculated via Fourier Transform Least squares error Correlation
- 4. Fourier-Mellin Transform Amplitude spectrum Log-polar transform Cross-corr. Via Fourier Find scale/ rotation Compensate scale/ rotation Cross.corr.
- 5. Block Matching: Local displacement extension Take local fragments around different points of pre-aligned images Match them
- 6. Resulting displacement field General solution for aerospace image matching!?
- 7. However… Optical image SAR image Cross-correlation field Many applications require matching images of different modalities Optical
- 8. Criterion: Mutual Information No correlation => No mutual information => Mutual information Cross correlation: degraded maximum
- 9. Invariant structural descriptions Image Contours Structural elements
- 10. Structural matching 1 2 5 2 5 1 2 3 5 2 2 4 2 4
- 11. More questions… How to estimate quality of structural correspondence? How to choose the group of transformations
- 12. MSE criterion: oversegmentation More precise Over-segmentation! Each region is described by average value Correct, but not
- 13. Functional approximation New point Worst prediction! Best precision
- 14. Information-theoretic criterion Again, criteria from information theory help: Mutual information can be extended for the task
- 15. Connection to Bayes’ rule Bayes rule: Posterior probability: P(H | D) Prior probability: P(H) Likelihood: P(D
- 16. Application to function approximation l(H) K(D|H) Too simple model Too complex model The best model is
- 17. Application to image segmentation Ngr=300; DL=4,5e+5 Ngr=100; DL=3,8e+5 Ngr=37; DL=3,7e+5 Ngr=7; DL=3,9e+5 Initial image
- 18. Contour segmentation MDL Images Extracted contours MSE-approximation with high threshold on dispersion MSE-approximation with low threshold
- 19. Full solution of invariant image matching Winter image Spring image Potapov A.S. Image matching with the
- 20. Successful matching
- 21. More applications of MDL Correct separation into clusters for keypoint matching in dynamic scenes Essential for
- 22. Pattern recognition, etc.: Support-vector machines; Discrimination functions; Gaussian mixtures; Decision forests; ICA (as a particular case
- 23. But wait… what about theory? MDL principle is used loosely Description lengths are calculated within heuristically
- 24. The theory behind MDL Algorithmic information theory U – universal Turing machine K – Kolmogorov complexity,
- 25. Universal prediction Solomonoff’s algorithmic probabilities Prior probability Predictive probability Universal distribution of prior probabilities dominates (with
- 26. Universality of the algorithmic space 3.1415926535 8979323846 2643383279 5028841971 6939937510 5820974944 5923078164 0628620899 8628034825 3421170679 8214808651
- 27. Grue Emerald Paradox Hypothesis No. 1: all emeralds are green Hypothesis No. 2: all emeralds are
- 28. Methodological usefulness Theory of universal induction answers the questions What is the source of overlearning/ overfitting/
- 29. Gap between universal and pragmatic methods Universal methods can work in arbitrary computable environment incomputable or
- 30. Choice of the reference UTM Unbiased AGI cannot be practical and efficient Dependence of the algorithmic
- 31. Limitations of narrow methods Brightness segmentation can fail even with the MDL criterion Essentially incorrect segments
- 32. More complex models… Image is described as a set of independent and identically distributed samples of
- 33. Comparison Images Brightness entropy Regression models Potapov A.S., Malyshev I.A., Puysha A.E., Averkin A.N. New paradigm
- 34. Classes of image representations* Low level (functional) representations Raw features (pixel level) Segmentation models (contours and
- 35. Example: image matching Low level representations Contour descriptions Structural descriptions Feature sets Key points Composite structural
- 36. But again… what about theory? MDL principle is used loosely Description lengths are calculated within heuristically
- 37. Polynomial decision function %(learn)=11.1 %(test)=5.4 L = 31.2 bit Np=4 %(learn)=2.8 %(test)=3.6 L = 30.9 bit
- 38. Choosing between mixtures with different number of components and restrictions laid on the covariance matrix of
- 39. Again, heuristic coding schemes Let’s switch back to theory
- 40. Universal Mass Induction Let be the set of strings An universal method cannot be applied to
- 41. Representational MDL principle Definition Let representation for the set of data entities be such the program
- 42. Possible usage of RMDL Synthetic pattern recognition methods*: Automatic selection among different pattern recognition methods Selecting
- 43. RMDL for optimizing ANN formalisms x3(t) w x2(t) q 1 x'(t)=1/x(t) x(t)=ln(t) -2 1 Considered extension
- 44. RMDL for optimizing ANN formalisms Experiments: Wolf annual sunspot time series Precision of forecasting depends on
- 45. RMDL for optimizing ANN formalisms Although we obtained an agreement between the short-term prediction precision and
- 46. OCT image segmentation Imprecise description within trivial representation Description within simple representation More precise description within
- 47. Segmentation results Description length, bits S-0: 212204 S-1: 184672 S-2: 175096 Description length, bits S-0: 231201
- 48. Application to image feature learning Training set with preliminarily matched key points using predefined hand-crafted feature
- 49. Results Matching with predefined hand-crafted feature transform Matching with learned (environment-specific) feature transform ~50% of failures
- 50. Analysis of hierarchical representations Pixel level Contour level Level of structural elements Level of groups of
- 51. Adaptive resonance Image 1st level description 2nd level description 3rd level description 4th level description Potapov
- 52. Implications Independent optimi-zation of descriptions Usage of integral description length Without resonance
- 53. Adaptive resonance: matching as construction of common description Initial structural elements of the first image Initial
- 54. Learning representations Very difficult problem in Turing-complete settings Successful methods use efficient search and restricted families
- 55. What is still missing? The MDL principle The RMDL principle ??? Kolmogorov complexity Heuristic criteria Reference
- 56. Key Idea Humans create narrow methods, which efficiently solve arbitrary recurring problems Generality should be achieved
- 57. Program Specialization specR(pL, x0) is the result of deep transformation of pL that can be much
- 58. Specialization of Universal Induction MSearch(S, x) is executed for different x with same S This search
- 59. Approach to Specialization Direct specialization of MSearch(S, x) w.r.t. some given S* No general techniques for
- 60. Conclusion Attempts to build more powerful practical methods leaded us to utilization of the MDL principle
- 62. Скачать презентацию
 Математические ребусы
Математические ребусы Сравнение десятичных дробей
Сравнение десятичных дробей Презентация к уроку математики в 1 классе Треугольник
Презентация к уроку математики в 1 классе Треугольник Величина угла. Измерение углов
Величина угла. Измерение углов Презентация к уроку математики во 2 классе по теме Периметр
Презентация к уроку математики во 2 классе по теме Периметр Умножение числа 2
Умножение числа 2 Разложение многочлена на множители с помощью комбинации различных приемов
Разложение многочлена на множители с помощью комбинации различных приемов Векторная алгебра. Скалярное произведение векторов. Векторное произведение векторов. Смешанное произведение векторов
Векторная алгебра. Скалярное произведение векторов. Векторное произведение векторов. Смешанное произведение векторов Информационно-исследовательский проект Магический куб
Информационно-исследовательский проект Магический куб Теорема Пифагора
Теорема Пифагора Позиция 15 базовый уровень. Планиметрия. Четырехугольники
Позиция 15 базовый уровень. Планиметрия. Четырехугольники Приращение аргумента, приращение функции
Приращение аргумента, приращение функции Числовые выражения
Числовые выражения Математическое моделирование как способ решения текстовой задачи
Математическое моделирование как способ решения текстовой задачи Неопределенность результата измерения
Неопределенность результата измерения Масштаб. Расчет и изображение чертежей в масштабе
Масштаб. Расчет и изображение чертежей в масштабе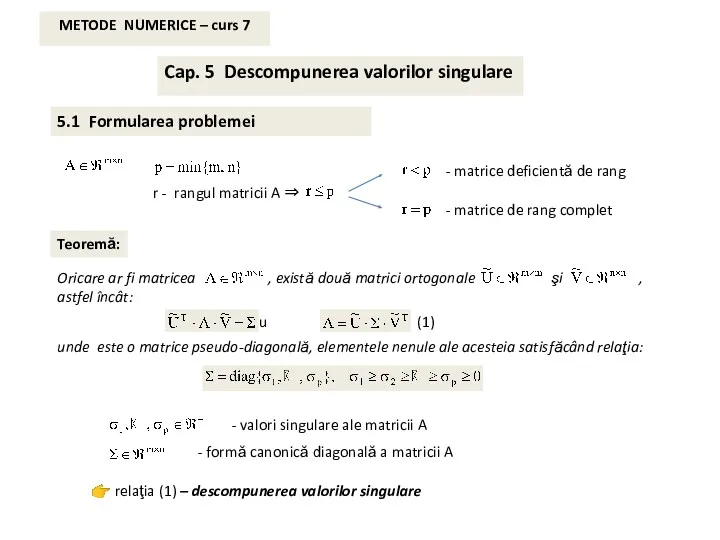 Descompunerea valorilor singulare. Formularea problemei (curs 7)
Descompunerea valorilor singulare. Formularea problemei (curs 7) Умножение десятичных дробей. 5 класс
Умножение десятичных дробей. 5 класс Приближенные значения чисел. Округление чисел
Приближенные значения чисел. Округление чисел Знакомимся с часами
Знакомимся с часами Решение примеров и задач в пределах 16. Урок-сказка Теремок 2класс VIII вида.
Решение примеров и задач в пределах 16. Урок-сказка Теремок 2класс VIII вида. Объёмы тел. Общие свойства объемов тел
Объёмы тел. Общие свойства объемов тел Практичне застосування логарифмічної і показникової функцій
Практичне застосування логарифмічної і показникової функцій Таблица умножения и деления на 6
Таблица умножения и деления на 6 Функції багатьох змінних
Функції багатьох змінних Теория вероятностей. Достоверные, невозможные, случайные события
Теория вероятностей. Достоверные, невозможные, случайные события Линейная модель парной регрессии. Лекция 4
Линейная модель парной регрессии. Лекция 4 Подобные слагаемые. 6 класс
Подобные слагаемые. 6 класс