- Introduction to vectors

Содержание
- 2. What are Vectors? Vectors are pairs of a direction and a magnitude. We usually represent a
- 3. Vectors in Rn (R1-space can be represented geometrically by the x-axis) (R2-space can be represented geometrically
- 4. Multiples of Vectors Given a real number c, we can multiply a vector by c by
- 5. Adding Vectors Two vectors can be added using the Parallelogram Law u v u + v
- 6. Combinations These operations can be combined. u v 2u -v 2u - v
- 7. Components To do computations with vectors, we place them in the plane and find their components.
- 8. Components The initial point is the tail, the head is the terminal point. The components are
- 9. Components The first component of v is 5 -2 = 3. The second is 6 -2
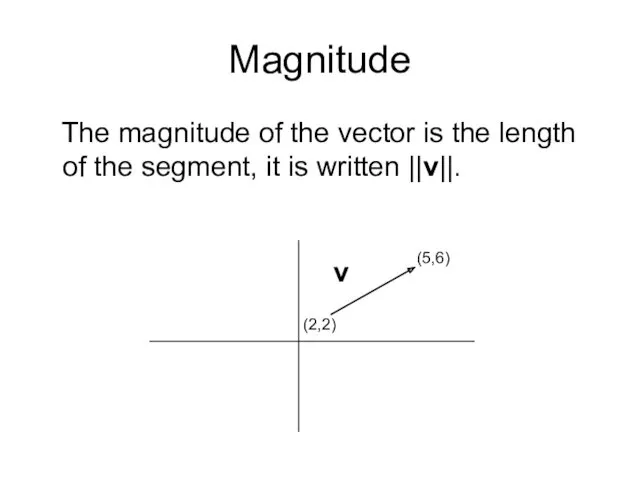
- 10. Magnitude The magnitude of the vector is the length of the segment, it is written ||v||.
- 11. Scalar Multiplication Once we have a vector in component form, the arithmetic operations are easy. To
- 12. Addition To add vectors, simply add their components. For example, if v = and w =
- 13. Unit Vectors A unit vector is a vector with magnitude 1. Given a vector v, we
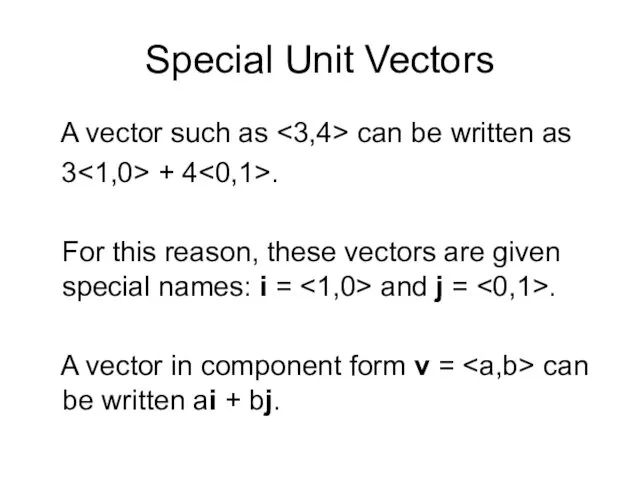
- 14. Special Unit Vectors A vector such as can be written as 3 + 4 . For
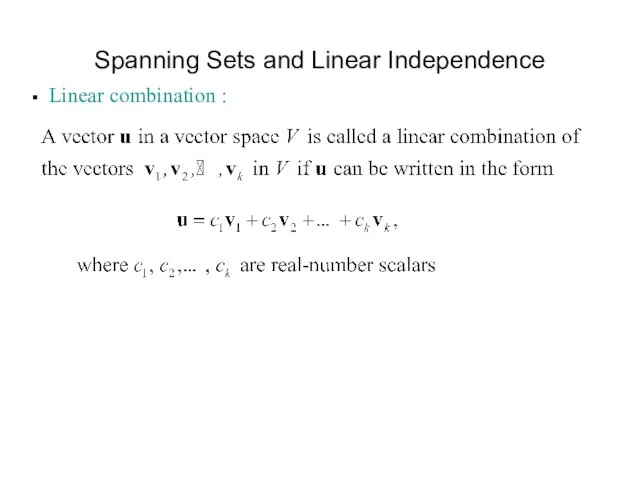
- 17. Spanning Sets and Linear Independence Linear combination :
- 18. Ex : Finding a linear combination Sol:
- 21. If S={v1, v2,…, vk} is a set of vectors in a vector space V, then the
- 22. Note: The above statement can be expressed as follows Ex 4:
- 23. Ex 5: A spanning set for R3 Sol:
- 25. Definitions of Linear Independence (L.I.) and Linear Dependence (L.D.) :
- 26. Ex : Testing for linear independence Sol: Determine whether the following set of vectors in R3
- 27. EX: Testing for linear independence Determine whether the following set of vectors in P2 is L.I.
- 28. Basis and Dimension Basis : V: a vector space S spans V (i.e., span(S) = V)
- 29. Notes: (1) the standard basis for R3: {i, j, k} i = (1, 0, 0), j
- 30. Ex: matrix space: (3) the standard basis matrix space:
- 32. Скачать презентацию
What are Vectors?
Vectors are pairs of a direction and a magnitude.
What are Vectors?
Vectors are pairs of a direction and a magnitude.
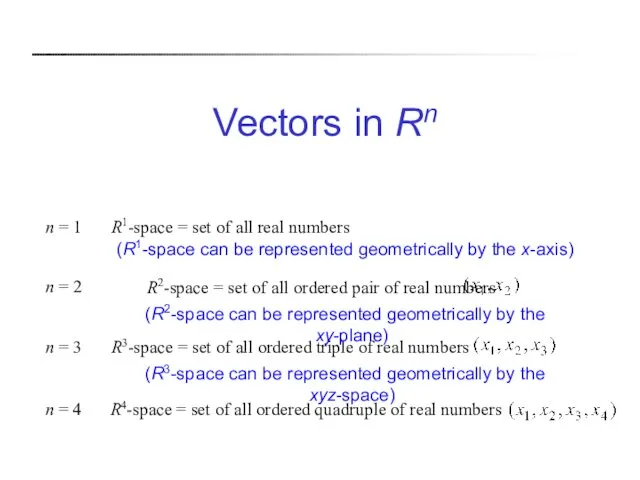
Vectors in Rn
(R1-space can be represented geometrically by the x-axis)
(R2-space can
Vectors in Rn
(R1-space can be represented geometrically by the x-axis)
(R2-space can
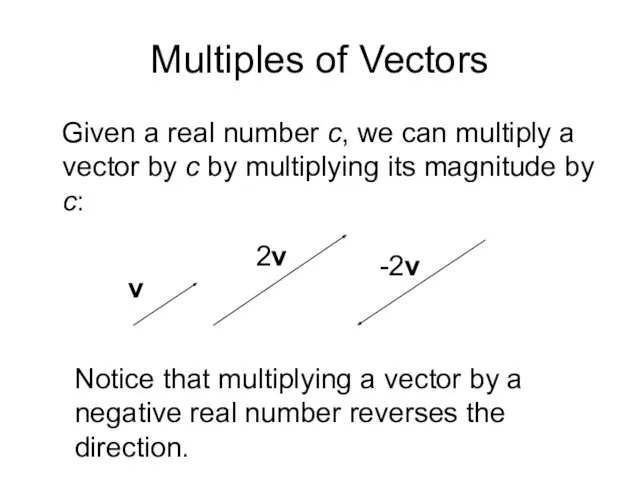
Multiples of Vectors
Given a real number c, we can multiply
Multiples of Vectors
Given a real number c, we can multiply
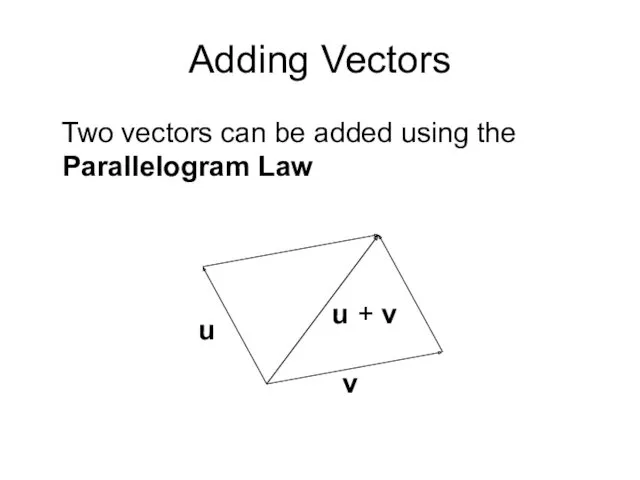
Adding Vectors
Two vectors can be added using the Parallelogram Law
u
v
u
Adding Vectors
Two vectors can be added using the Parallelogram Law
u
v
u
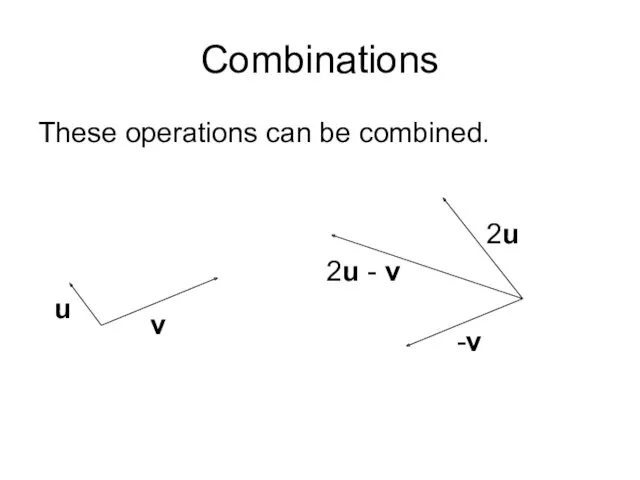
Combinations
These operations can be combined.
u
v
2u
-v
2u - v
Combinations
These operations can be combined.
u
v
2u
-v
2u - v
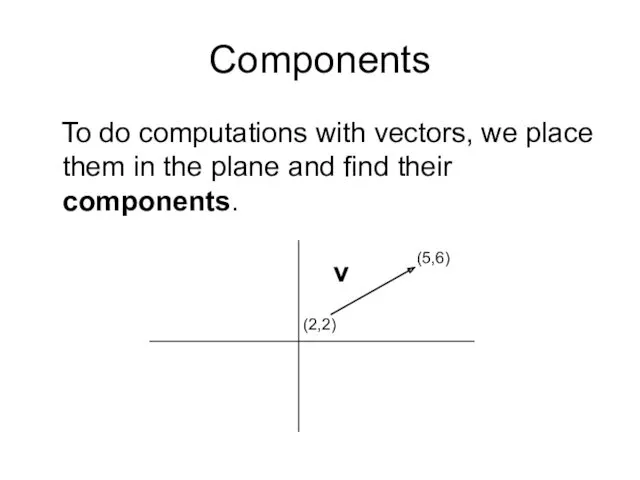
Components
To do computations with vectors, we place them in the
Components
To do computations with vectors, we place them in the
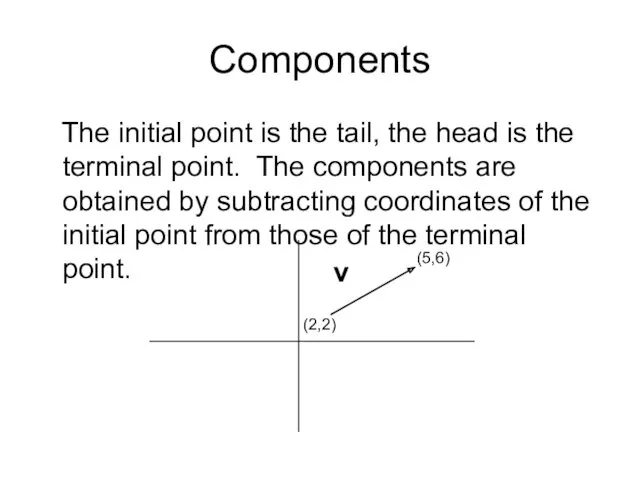
Components
The initial point is the tail, the head is the
Components
The initial point is the tail, the head is the
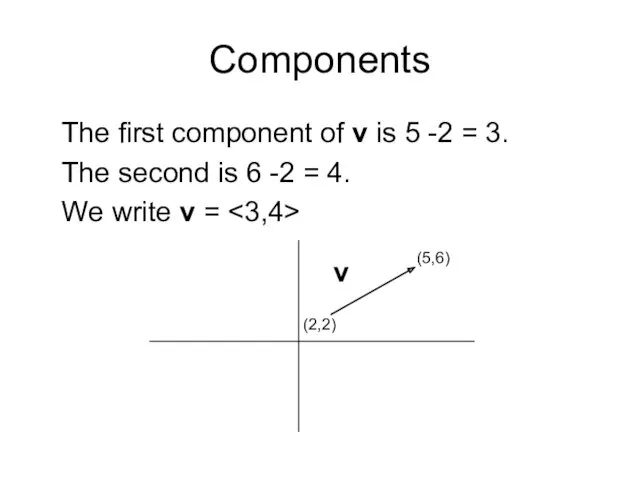
Components
The first component of v is 5 -2 = 3.
Components
The first component of v is 5 -2 = 3.
Magnitude
The magnitude of the vector is the length of the
Magnitude
The magnitude of the vector is the length of the
Scalar Multiplication
Once we have a vector in component form, the
Scalar Multiplication
Once we have a vector in component form, the
Addition
To add vectors, simply add their components.
For example, if
Addition
To add vectors, simply add their components.
For example, if
Unit Vectors
A unit vector is a vector with magnitude 1.
Unit Vectors
A unit vector is a vector with magnitude 1.
Special Unit Vectors
A vector such as <3,4> can be written
Special Unit Vectors
A vector such as <3,4> can be written
Spanning Sets and Linear Independence
Linear combination :
Spanning Sets and Linear Independence
Linear combination :
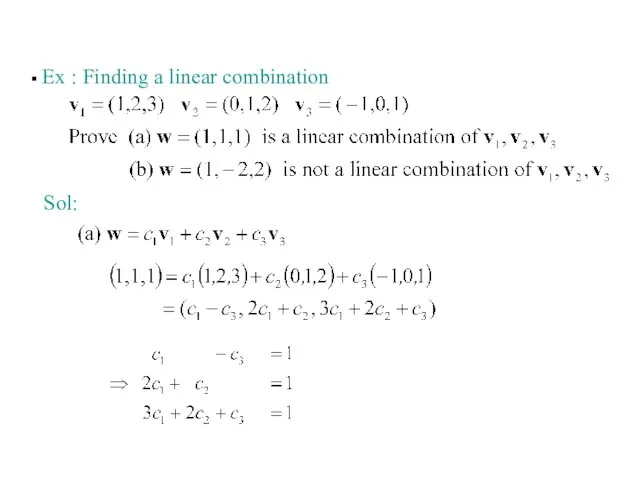
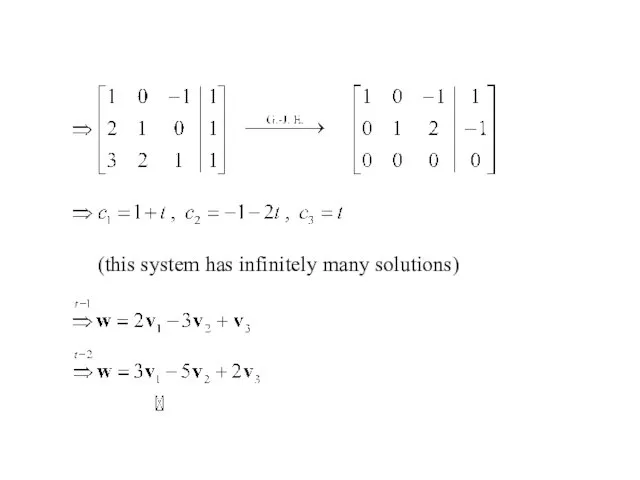
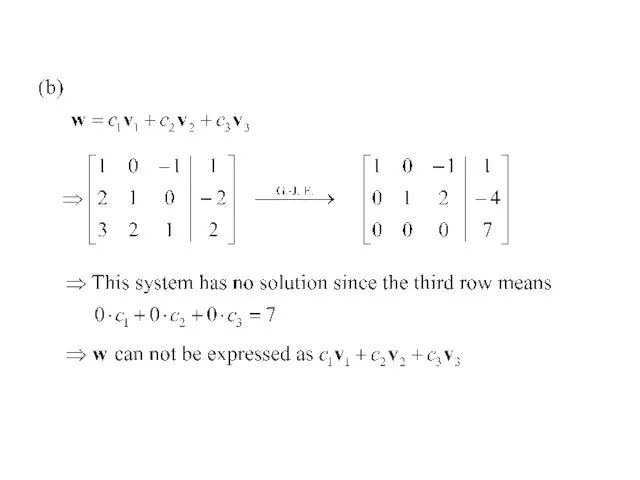
Ex : Finding a linear combination
Sol:
Ex : Finding a linear combination
Sol:
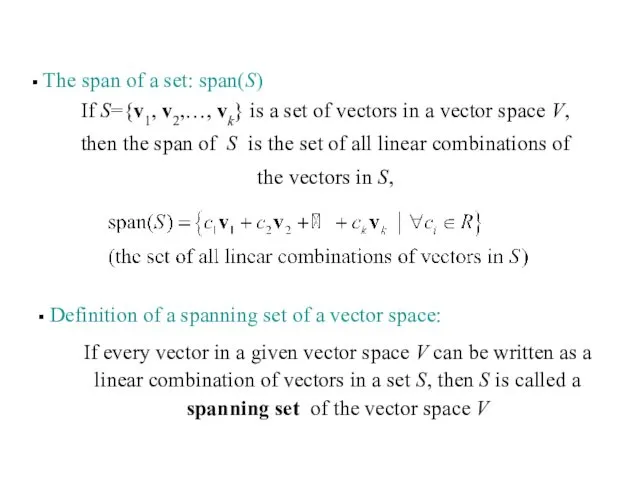
If S={v1, v2,…, vk} is a set of vectors in a
If S={v1, v2,…, vk} is a set of vectors in a
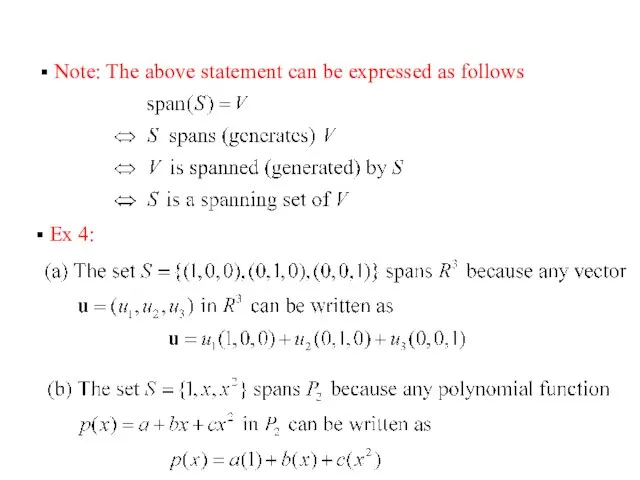
Note: The above statement can be expressed as follows
Ex
Note: The above statement can be expressed as follows
Ex
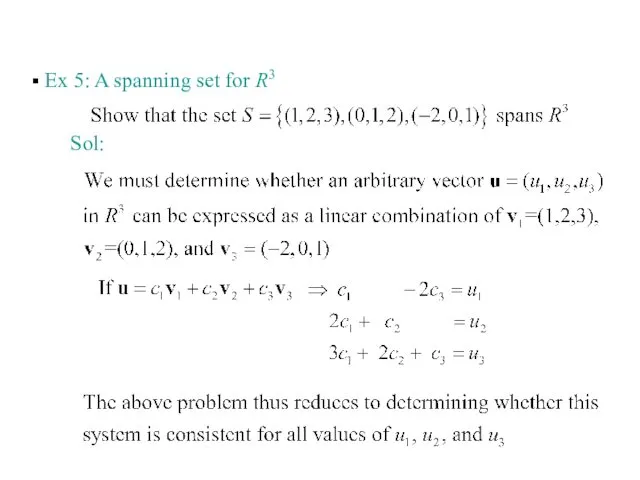
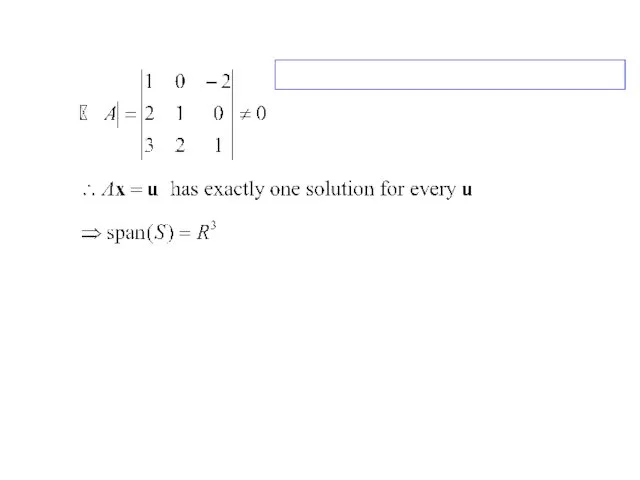
Ex 5: A spanning set for R3
Sol:
Ex 5: A spanning set for R3
Sol:
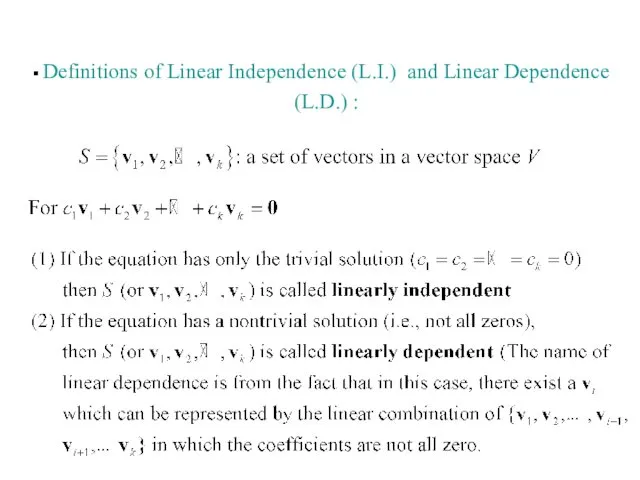
Definitions of Linear Independence (L.I.) and Linear Dependence (L.D.) :
Definitions of Linear Independence (L.I.) and Linear Dependence (L.D.) :
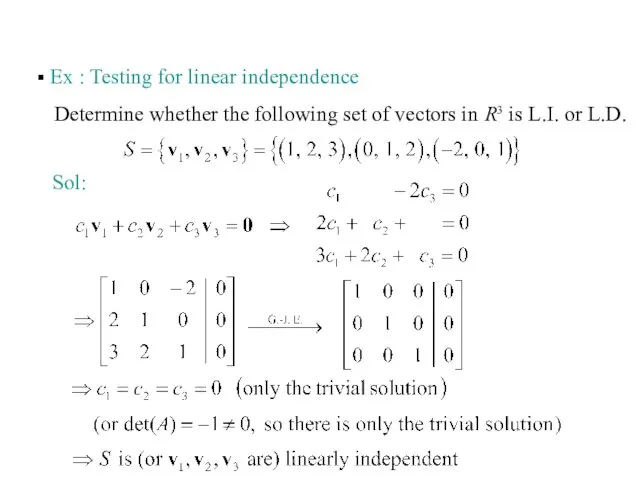
Ex : Testing for linear independence
Sol:
Determine whether the following set
Ex : Testing for linear independence
Sol:
Determine whether the following set
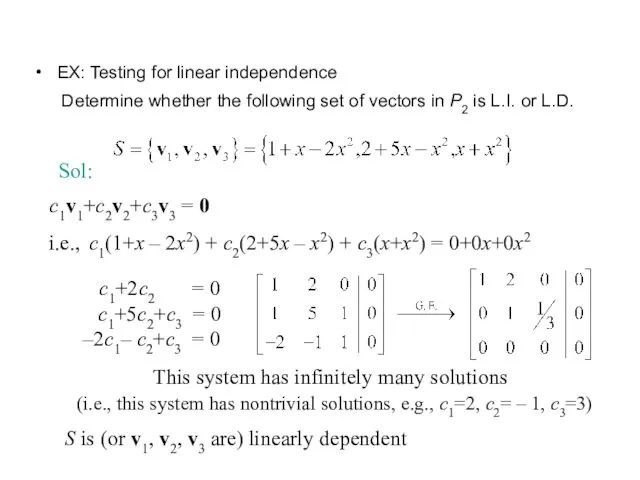
EX: Testing for linear independence
Determine whether the following set of
EX: Testing for linear independence
Determine whether the following set of
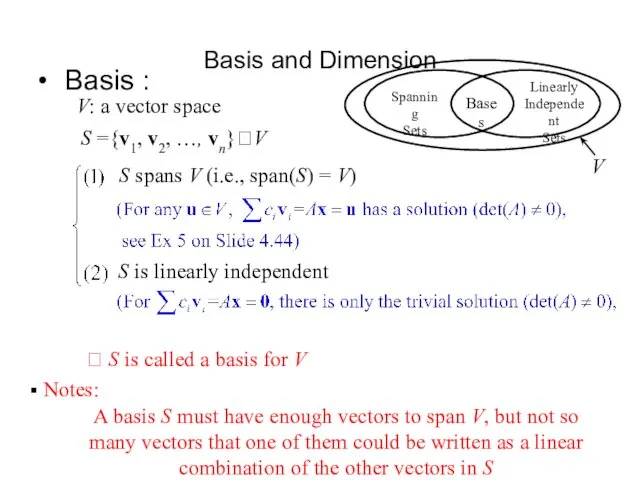
Basis and Dimension
Basis :
V: a vector space
S spans V (i.e.,
Basis and Dimension
Basis :
V: a vector space
S spans V (i.e.,
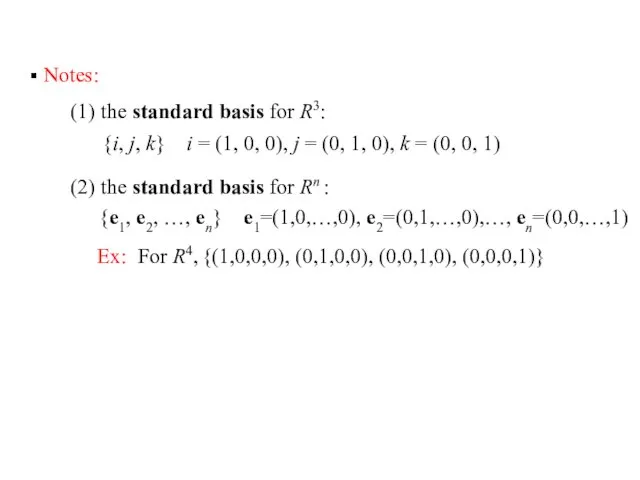
Notes:
(1) the standard basis for R3:
{i, j, k} i =
Notes:
(1) the standard basis for R3:
{i, j, k} i =
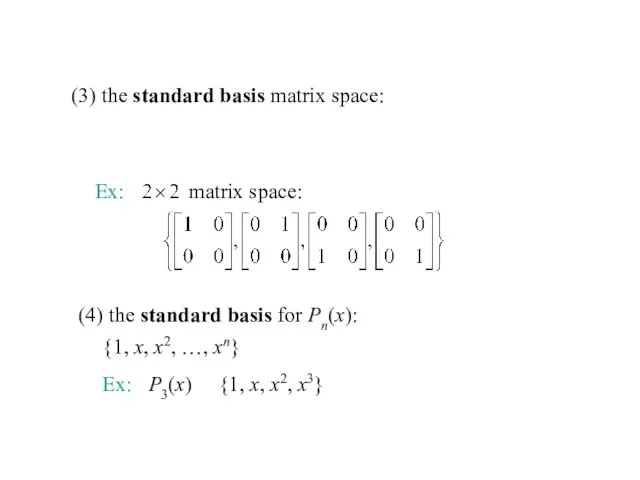
Ex: matrix space:
(3) the standard basis matrix space:
Ex: matrix space:
(3) the standard basis matrix space:
 Умножение целых чисел
Умножение целых чисел Замечательные кривые в математике
Замечательные кривые в математике Використання формул скороченого множення для розкладання многочлена на множники
Використання формул скороченого множення для розкладання многочлена на множники Познавательные математические цепочки
Познавательные математические цепочки Формулы разности и суммы кубов
Формулы разности и суммы кубов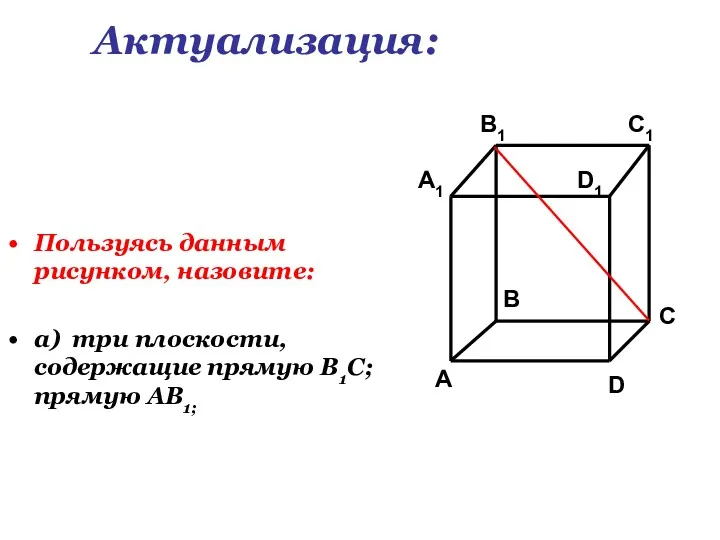 Решение задач на применение аксиом стереометрии и их следствий
Решение задач на применение аксиом стереометрии и их следствий Ряды динамики
Ряды динамики Ремонт кабинета с использованием математических формул
Ремонт кабинета с использованием математических формул Приближение десятичных дробей
Приближение десятичных дробей Старинные задачи по элементарной математике (Россия)
Старинные задачи по элементарной математике (Россия) Математическое описание линейных САУ. Дифференциальные уравнения, передаточная функция. Временные и частотные характеристики
Математическое описание линейных САУ. Дифференциальные уравнения, передаточная функция. Временные и частотные характеристики Свойства параллельных плоскостей
Свойства параллельных плоскостей В гости к царице Математике
В гости к царице Математике Математика. 1 класс. Урок 36. Числа 1-6 - Презентация
Математика. 1 класс. Урок 36. Числа 1-6 - Презентация Этапы расчета прогнозных значений методом прогнозной экспраполяции
Этапы расчета прогнозных значений методом прогнозной экспраполяции Как найти неизвестное вычитаемое
Как найти неизвестное вычитаемое Создание проблемных ситуаций через умышленно допущенные учителем ошибки
Создание проблемных ситуаций через умышленно допущенные учителем ошибки Основы теории вероятностей
Основы теории вероятностей Неопределённый интеграл, его свойства . Непосредственное интегрирование. Метод замены переменной в неопределенном интеграле
Неопределённый интеграл, его свойства . Непосредственное интегрирование. Метод замены переменной в неопределенном интеграле Замечательные пределы
Замечательные пределы Образование чисел из одного десятка и нескольких единиц
Образование чисел из одного десятка и нескольких единиц Численные методы оптимизации
Численные методы оптимизации Углы. Виды углов
Углы. Виды углов Таблица умножения достойна уважения.
Таблица умножения достойна уважения. Тела вращения
Тела вращения Екі түзудің ара қашықтығы
Екі түзудің ара қашықтығы Сложение и вычитание дробей с одинаковыми знаменателями
Сложение и вычитание дробей с одинаковыми знаменателями урок математики в 1 классе Числа 1 – 10 . Закрепление
урок математики в 1 классе Числа 1 – 10 . Закрепление