- Вычисления в MATLAB

Содержание
- 2. MATLAB обладает большим набором встроенных функций реализующих различные численные методы: нахождение корней уравнений, интегрирование, интерполирование, решение
- 3. Решение произвольных уравнений Функция x=fzero('myf', xo) позволяет вычислять приближенное значение корня x уравнения myf(x)=0, (1) с
- 4. Перед нахождением корней полезно строить график функции входящей в левую часть уравнения, используя plot, но все
- 5. Пример 1 Найти корни уравнения sin x-x2 cos x=0 на [-5,5]. Решение
- 6. Аналогично находятся еще два корня, около -2 и 5. Увидеть, большее число значащих цифр приближенного решения
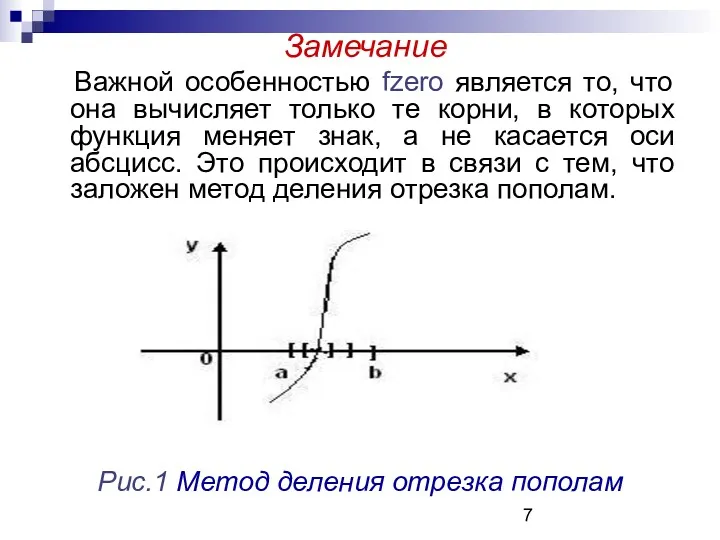
- 7. Замечание Важной особенностью fzero является то, что она вычисляет только те корни, в которых функция меняет
- 8. Например, корень уравнения х2=0 функцией fzero найти не удается. Для нахождения корня х на интервале [a,
- 9. Пример 2 > fzero('sin', [2,4]) ans = 3.1415…
- 10. Замечание 1. Если функция имеет несколько нулей, то выдается ближайший к 0; 2. На границе интервал
- 11. Минимизация функций Для поиска локального минимума функции myf одной переменной на отрезке [a, b] используют x=
- 12. Замечание 1) Для нахождения локального максимума нет специальной функции и поэтому следует искать минимум функции с
- 13. Для нахождения локального минимума функции myfm многих переменных вблизи точки (х1,…,хn) используют M=fminsearch('myfm',[x1,x2,…,xn]); [M, f]= fminsearch('myfm',[x1,x2,…,xn]).
- 14. Метод Нельдера-Мида Для нахождение минимума используют симплекс метод Нельдера-Мида. Он заключается в следующем: берутся 3 вершины
- 15. Замечание Для нахождения начального значения (x1,x2,…,xn), нужно получить представление о поведении функции, например, построив линии уровня
- 16. Задание дополнительных параметров Функции fzero, fminbnd и fminsearch позволяют задать дополнительный параметр options, контролирующий вычислительный процесс:
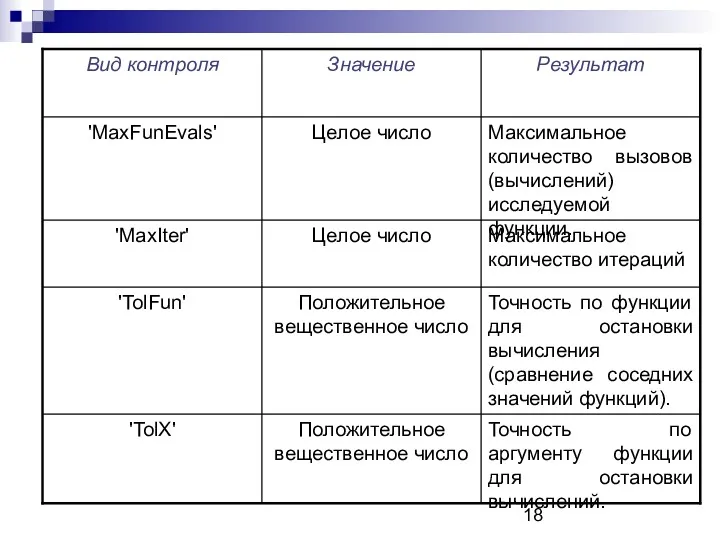
- 17. Таблица 1 Значения дополнительных параметров
- 19. Замечание Ограничивать количество вызовов функции и число итераций имеет смысл, если есть опасение, что получить решение
- 20. Пример 3 Найти минимум функции f(x, y)= sin(πx)*sin(πy) вблизи точки [1.4, 0.6] с точностью по функции
- 21. Решение В итоге, кроме результата, выведется таблица каждая строка, которой соответствует одной итерации. В ней будет
- 22. Интегрирование функций Методы интегрирования Для вычисления определенного интеграла используются следующие функции:
- 23. 1. quad('fint',a,b, Точность) Алгоритм основан на квадратурной формуле Симпсона с автоматическим подбором шага интегрирования для достижения
- 24. 2. quad8('fint',a,b, Точность) Используется для достаточно гладких функции и алгоритм основан на более точных квадратурных формулах
- 25. quadl('fint',a,b, Точность) Применяется для функций с интегрируемыми особенностями (например: в нуле). Алгоритм основан на квадратурных формулах
- 26. Пример 4 Вычислить по quad8 с точностью 10-12. Решение
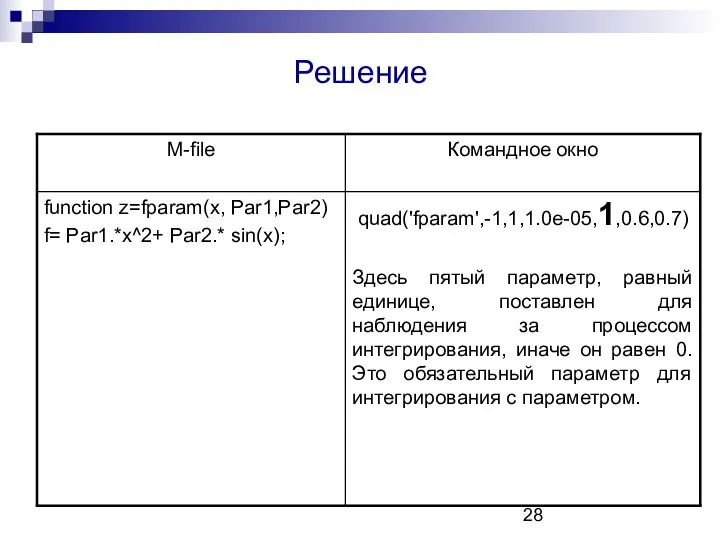
- 27. Вычисление интегралов зависящих от параметров Пример 5 Вычислить интеграл при значениях параметров р1=0.6, р2=0.7 по квадратурным
- 28. Решение
- 29. Интегралы с переменным верхним пределом Пример 6 Вычислить интеграл с точностью 10-6.
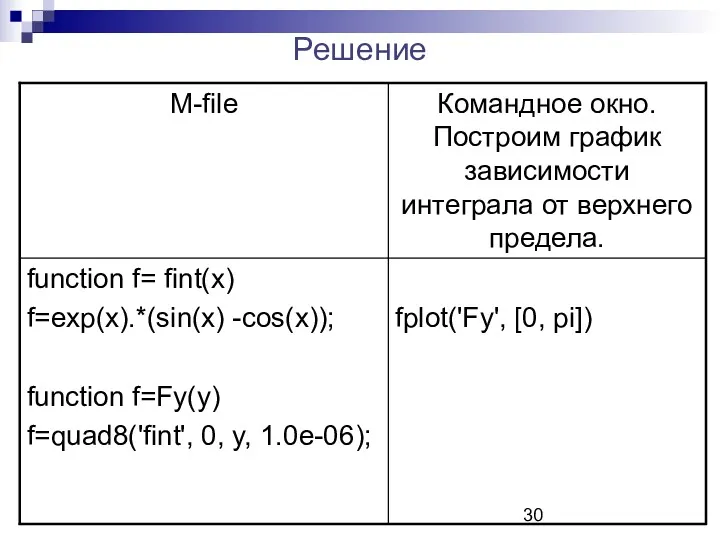
- 30. Решение
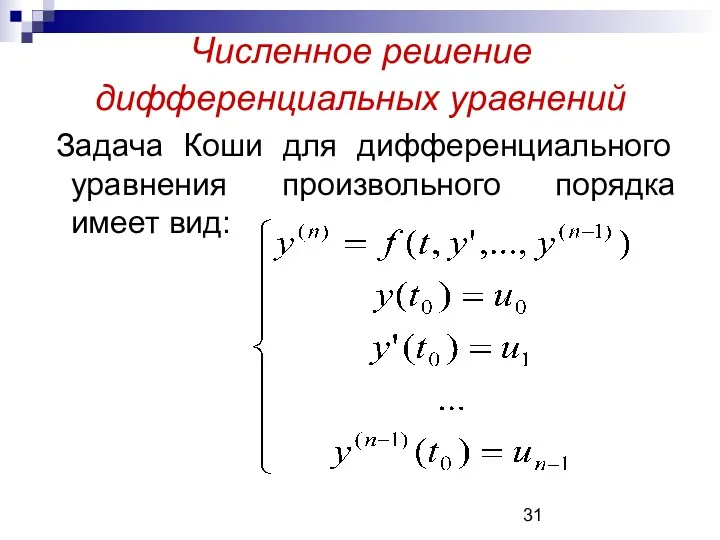
- 31. Численное решение дифференциальных уравнений Задача Коши для дифференциального уравнения произвольного порядка имеет вид:
- 32. Схема решения в MATLAB состоит из следующих этапов: 1. Приведение дифференциального уравнения к системе дифференциального уравнений
- 33. Пример 7 Задача о колебаниях под воздействием внешней силы в среде, оказывающей сопротивление колебаниям: y''+2y'+10y=sin t
- 34. Тогда система дифференциальных уравнений с начальными условиями принимает вид: (1)
- 35. Второй этап состоит в написании файл-функции имеющей два входных аргумента: переменную t и вектор, размер которого
- 36. Третий шаг. Этот шаг состоит в решении задачи при помощи решателя или солвера (об их видах
- 37. Входными аргументами солверов являются: Имя файл-функции в апострофах; 2. Вектор-строка с начальным и конечным значением времени
- 38. Выходных аргументов два: Вектор Т содержащий значение времени; 2. Матрица значений Y неизвестных функций в соответствующие
- 39. Итак, файл программа для 0≤ t≤ 15 имеет вид. Y0= [1; 0]; [T, Y]=ode45('oscil', [0 15],
- 40. Рис.2 Решение дифференциального уравнения
- 41. Замечание Здесь использовался солвер ode45, который применяет метод Рунге-Кутта четвертого порядка. При применении солвера очень важно
- 42. Жесткие дифференциальные системы Решение уравнений Лотка-Вольтерра Во многих приложениях встречаются так называемые «жесткие» системы дифференциальных уравнений.
- 43. Например , причем, λ1, λ2>0 и >>1. Число s называют коэффициентом жесткости системы. Решение имеет вид:
- 44. Отметим, что жесткость – это качество дифференциальной системы, а не разностного метода (обычно нелинейные системы). В
- 45. Число хищников и жертв в течение времени t изменяется по закону (2) где P – увеличение
- 46. Решением системы (2) является замкнутая кривая. Возьмем для примера P=3, R=2, p=r=1 y1(0)=3 – в начальный
- 47. Рис.3 Решения солверами ode45 и ode23s
- 48. Вычисление, по умолчанию, в ode45 и ode23s происходит при одной точности, а приближенные решения сильно отличаются
- 49. Управление процессом решения Для эффективного решения дифференциальных уравнений необходимо выбрать подходящий солвер в зависимости от свойств
- 50. Стратегия применения солверов MATLAB (см. справку по MATLAB). ode45 – дает хорошие результаты и основан на
- 51. ode23 – используется в задачах содержащих небольшую жесткость, когда требуется получить решение с невысокой степенью точности.
- 52. Если все попытки применения этих солверов не приводят к успеху, то возможно решаемая система является жесткой
- 53. Все солверы пытаются найти решение с относительной точностью 10-3. Для задания другой точности используются дополнительный параметр
- 54. Замечание При заданных по умолчанию значениях, в частности при относительной погрешности 10-3, не всегда возможно получение
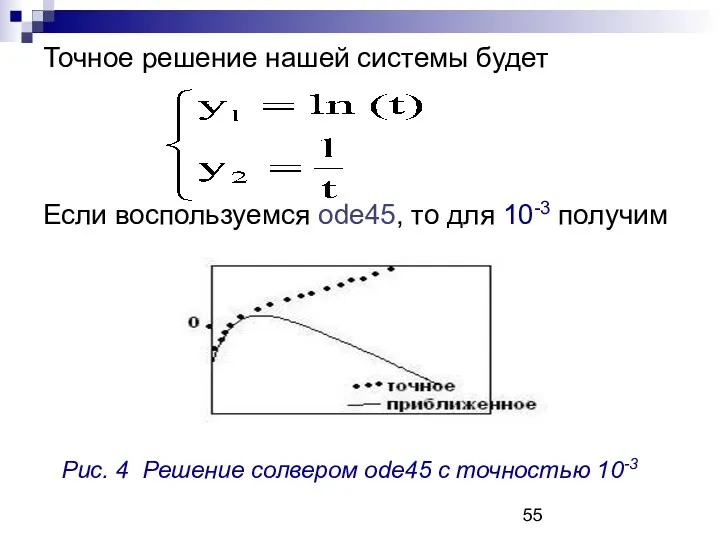
- 55. Точное решение нашей системы будет Если воспользуемся ode45, то для 10-3 получим Рис. 4 Решение солвером
- 56. Применение других солверов не улучшает ситуацию. Выход – уменьшение относительной погрешности. options=odeset('RelTol', 1.0e-04) [T, Y] =ode45
- 57. Замечание Существует отдельный пакет для уравнений в частных производных Partial Diffential Equation ToolBOX.
- 58. Решение граничных задач Рассмотрим граничную задачу общего вида для обыкновенного дифференциального уравнения второго порядка: где -
- 59. Решение задачи состоит из следующих этапов: 1. Преобразование дифференциального уравнения второго порядка к системе двух уравнений
- 60. Первые два этапа выполняются практически так же, как и при решении задачи Коши. Для выполнения 3-го
- 61. Файл-функция описывающая граничные условия должна зависеть от двух аргументов – векторов ya, yb и иметь структуру:
- 62. Выбор начального приближения может оказать влияние на решение солвером bvp4c. MATLAB находит приближенное решение граничных задач
- 63. Пример 8 Пусть [a, b]= [0, 2*pi] и начальное приближение y1=1, y2=0, тогда initsol=bvpinit ([0: pi/10:2*pi],
- 64. Замечание Заданная сетка может быть изменена солвером в процессе решения, для обеспечения требуемой точности.
- 65. Следующим этапом мы должны вызвать солвер: sol=bvp4c('Функция правой части', 'bound', initsol); где структура sol имеет поля
- 67. Скачать презентацию
MATLAB обладает большим набором встроенных функций реализующих различные численные методы: нахождение
Решение произвольных уравнений
Функция
x=fzero('myf', xo)
позволяет вычислять приближенное значение корня x
Решение произвольных уравнений
Функция
x=fzero('myf', xo)
позволяет вычислять приближенное значение корня x
Перед нахождением корней полезно строить график функции входящей в левую
Перед нахождением корней полезно строить график функции входящей в левую
![Пример 1 Найти корни уравнения sin x-x2 cos x=0 на [-5,5]. Решение](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/207882/slide-4.jpg)
Пример 1
Найти корни уравнения sin x-x2 cos x=0 на
Пример 1
Найти корни уравнения sin x-x2 cos x=0 на
Аналогично находятся еще два корня, около -2 и 5. Увидеть, большее
Аналогично находятся еще два корня, около -2 и 5. Увидеть, большее
Замечание
Важной особенностью fzero является то, что она вычисляет только
Замечание
Важной особенностью fzero является то, что она вычисляет только
Например, корень уравнения х2=0 функцией fzero найти не удается.
Для нахождения
Для нахождения
![Пример 2 > fzero('sin', [2,4]) ans = 3.1415…](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/207882/slide-8.jpg)
Пример 2
> fzero('sin', [2,4])
ans =
3.1415…
Пример 2
> fzero('sin', [2,4])
ans =
3.1415…
Замечание
1. Если функция имеет несколько нулей, то выдается ближайший
Замечание
1. Если функция имеет несколько нулей, то выдается ближайший
Минимизация функций
Для поиска локального минимума функции myf одной переменной
Минимизация функций
Для поиска локального минимума функции myf одной переменной
Замечание
1) Для нахождения локального максимума нет специальной функции и поэтому
Замечание
1) Для нахождения локального максимума нет специальной функции и поэтому
Для нахождения локального минимума функции myfm многих переменных вблизи точки (х1,…,хn)
Для нахождения локального минимума функции myfm многих переменных вблизи точки (х1,…,хn)
Метод Нельдера-Мида
Для нахождение минимума используют симплекс метод Нельдера-Мида.
Он заключается в
Метод Нельдера-Мида
Для нахождение минимума используют симплекс метод Нельдера-Мида.
Он заключается в
Замечание
Для нахождения начального значения (x1,x2,…,xn), нужно получить представление о поведении
Замечание
Для нахождения начального значения (x1,x2,…,xn), нужно получить представление о поведении
Задание дополнительных параметров
Функции
fzero, fminbnd и fminsearch
позволяют задать дополнительный
Задание дополнительных параметров
Функции
fzero, fminbnd и fminsearch
позволяют задать дополнительный
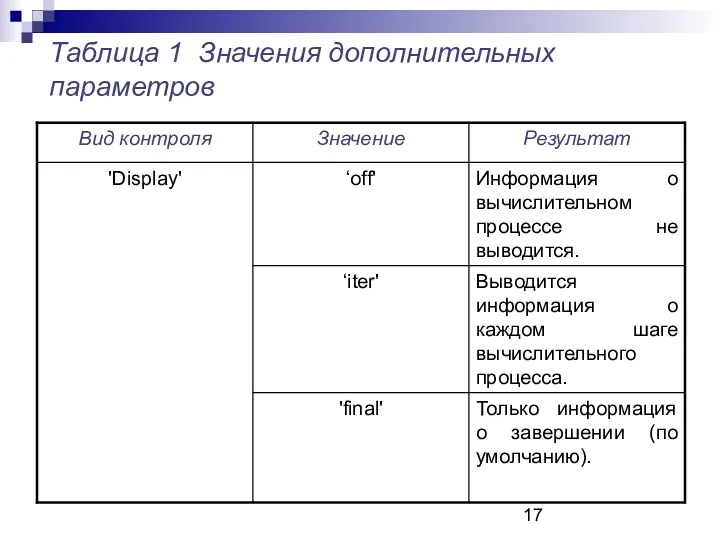
Таблица 1 Значения дополнительных параметров
Таблица 1 Значения дополнительных параметров
Замечание
Ограничивать количество вызовов функции и число итераций имеет
Замечание
Ограничивать количество вызовов функции и число итераций имеет
Пример 3
Найти минимум функции
f(x, y)= sin(πx)*sin(πy)
вблизи точки
Пример 3
Найти минимум функции
f(x, y)= sin(πx)*sin(πy)
вблизи точки
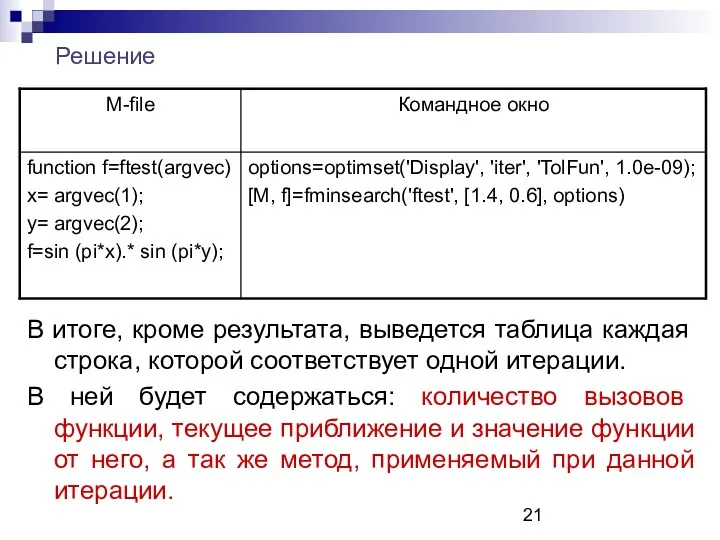
Решение
В итоге, кроме результата, выведется таблица каждая строка, которой соответствует
Решение
В итоге, кроме результата, выведется таблица каждая строка, которой соответствует
Интегрирование функций
Методы интегрирования
Для вычисления определенного интеграла используются следующие функции:
Интегрирование функций
Методы интегрирования
Для вычисления определенного интеграла используются следующие функции:
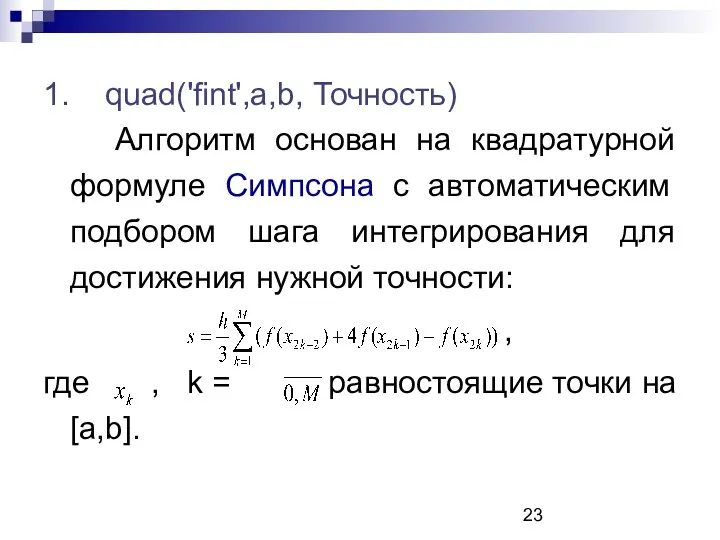
1. quad('fint',a,b, Точность)
Алгоритм основан на квадратурной формуле Симпсона с
1. quad('fint',a,b, Точность)
Алгоритм основан на квадратурной формуле Симпсона с
2. quad8('fint',a,b, Точность)
Используется для достаточно гладких функции и алгоритм
2. quad8('fint',a,b, Точность)
Используется для достаточно гладких функции и алгоритм
quadl('fint',a,b, Точность)
Применяется для функций с интегрируемыми особенностями (например: в нуле).
quadl('fint',a,b, Точность)
Применяется для функций с интегрируемыми особенностями (например: в нуле).
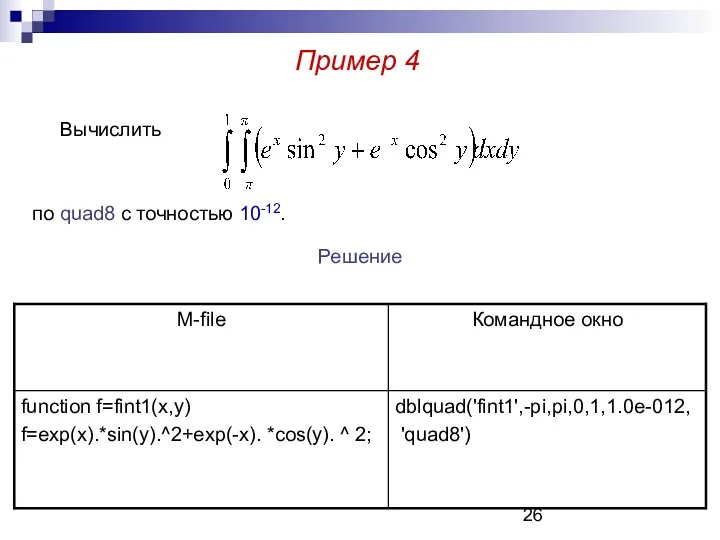
Пример 4
Вычислить
по quad8 с точностью 10-12.
Решение
Пример 4
Вычислить
по quad8 с точностью 10-12.
Решение
Вычисление интегралов зависящих от параметров
Пример 5
Вычислить интеграл
при значениях параметров
Вычисление интегралов зависящих от параметров
Пример 5
Вычислить интеграл
при значениях параметров
Решение
Решение
Интегралы с переменным верхним пределом
Пример 6
Вычислить интеграл
с точностью 10-6.
Интегралы с переменным верхним пределом
Пример 6
Вычислить интеграл
с точностью 10-6.
Решение
Решение
Численное решение дифференциальных уравнений
Задача Коши для дифференциального уравнения произвольного
Численное решение дифференциальных уравнений
Задача Коши для дифференциального уравнения произвольного
Схема решения в MATLAB состоит из следующих этапов:
1. Приведение
Схема решения в MATLAB состоит из следующих этапов:
1. Приведение
Пример 7
Задача о колебаниях под воздействием внешней силы в среде, оказывающей
Пример 7
Задача о колебаниях под воздействием внешней силы в среде, оказывающей
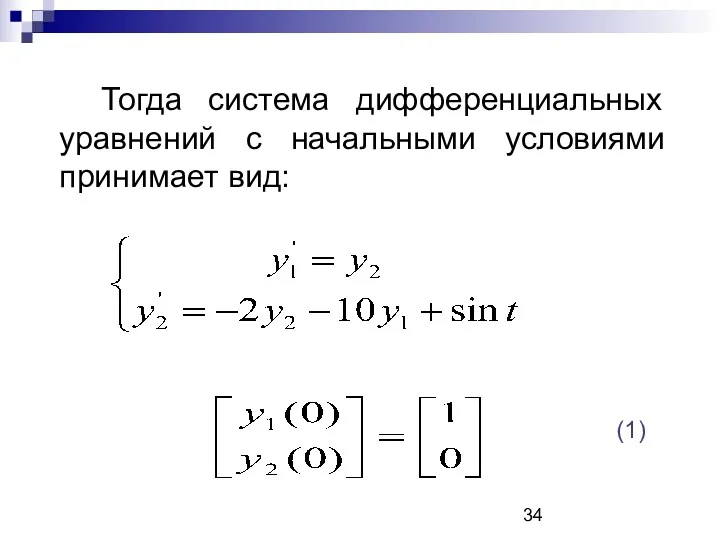
Тогда система дифференциальных уравнений с начальными условиями принимает вид:
(1)
(1)
Второй этап состоит в написании файл-функции имеющей два входных аргумента: переменную
Второй этап состоит в написании файл-функции имеющей два входных аргумента: переменную
Третий шаг.
Этот шаг состоит в решении задачи при помощи решателя или
Этот шаг состоит в решении задачи при помощи решателя или
Входными аргументами солверов являются:
Имя файл-функции в апострофах;
2. Вектор-строка с начальным и
Входными аргументами солверов являются:
Имя файл-функции в апострофах;
2. Вектор-строка с начальным и
Выходных аргументов два:
Вектор Т содержащий значение времени;
2. Матрица значений Y неизвестных
Выходных аргументов два:
Вектор Т содержащий значение времени;
2. Матрица значений Y неизвестных
Итак, файл программа для 0≤ t≤ 15 имеет вид.
Y0= [1; 0];
Итак, файл программа для 0≤ t≤ 15 имеет вид.
Y0= [1; 0];
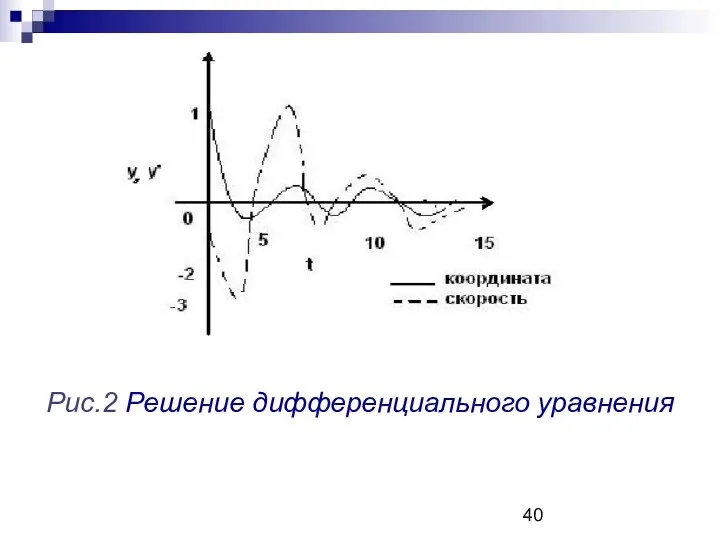
Рис.2 Решение дифференциального уравнения
Замечание
Здесь использовался солвер
ode45,
который применяет метод Рунге-Кутта четвертого порядка.
Замечание
Здесь использовался солвер
ode45,
который применяет метод Рунге-Кутта четвертого порядка.
Жесткие дифференциальные системы
Решение уравнений Лотка-Вольтерра
Во многих приложениях встречаются так называемые
Жесткие дифференциальные системы
Решение уравнений Лотка-Вольтерра
Во многих приложениях встречаются так называемые
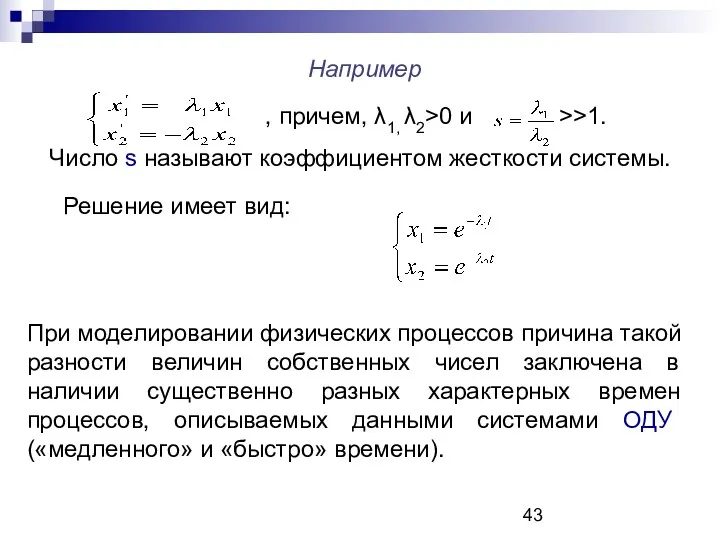
Например
, причем, λ1, λ2>0 и >>1.
Число s
Например
, причем, λ1, λ2>0 и >>1.
Число s
Отметим, что жесткость – это качество дифференциальной системы, а не разностного
Отметим, что жесткость – это качество дифференциальной системы, а не разностного
Число хищников и жертв в течение времени t изменяется по закону
Число хищников и жертв в течение времени t изменяется по закону
Решением системы (2) является замкнутая кривая.
Возьмем для примера
P=3, R=2,
Возьмем для примера
P=3, R=2,
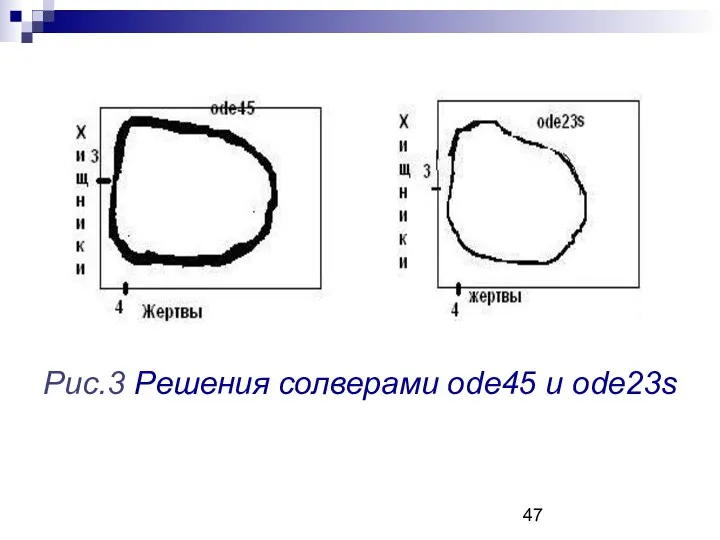
Рис.3 Решения солверами ode45 и ode23s
Рис.3 Решения солверами ode45 и ode23s
Вычисление, по умолчанию, в ode45 и ode23s происходит при одной точности,
Управление процессом решения
Для эффективного решения дифференциальных уравнений необходимо выбрать подходящий
Управление процессом решения
Для эффективного решения дифференциальных уравнений необходимо выбрать подходящий
Стратегия применения солверов MATLAB
(см. справку по MATLAB).
ode45 – дает
Стратегия применения солверов MATLAB
(см. справку по MATLAB).
ode45 – дает
ode23 – используется в задачах содержащих небольшую жесткость, когда требуется получить
Если все попытки применения этих солверов не приводят к успеху, то
Если все попытки применения этих солверов не приводят к успеху, то
Все солверы пытаются найти решение с относительной точностью 10-3.
Для задания другой
Все солверы пытаются найти решение с относительной точностью 10-3.
Для задания другой
Замечание
При заданных по умолчанию значениях, в частности при относительной погрешности
Замечание
При заданных по умолчанию значениях, в частности при относительной погрешности
Точное решение нашей системы будет
Если воспользуемся ode45, то для 10-3
Точное решение нашей системы будет
Если воспользуемся ode45, то для 10-3
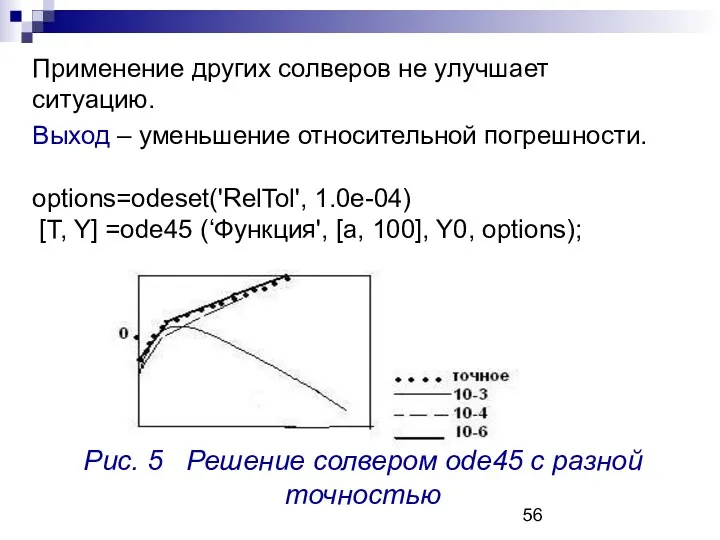
Применение других солверов не улучшает ситуацию.
Выход – уменьшение относительной погрешности.
options=odeset('RelTol',
Применение других солверов не улучшает ситуацию.
Выход – уменьшение относительной погрешности.
options=odeset('RelTol',
Замечание
Существует отдельный пакет для уравнений в частных производных Partial Diffential
Замечание
Существует отдельный пакет для уравнений в частных производных Partial Diffential
Решение граничных задач
Рассмотрим граничную задачу общего вида для обыкновенного дифференциального
Решение граничных задач
Рассмотрим граничную задачу общего вида для обыкновенного дифференциального
Решение задачи состоит из следующих этапов:
1. Преобразование дифференциального уравнения второго порядка
Решение задачи состоит из следующих этапов:
1. Преобразование дифференциального уравнения второго порядка
Первые два этапа выполняются практически так же, как и при решении
Файл-функция описывающая граничные условия должна зависеть от двух аргументов – векторов
Файл-функция описывающая граничные условия должна зависеть от двух аргументов – векторов
Выбор начального приближения может оказать влияние на решение солвером bvp4c.
MATLAB
MATLAB
![Пример 8 Пусть [a, b]= [0, 2*pi] и начальное приближение](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/207882/slide-62.jpg)
Пример 8
Пусть [a, b]= [0, 2*pi] и начальное приближение
y1=1,
Пусть [a, b]= [0, 2*pi] и начальное приближение
y1=1,
Замечание
Заданная сетка может быть изменена солвером в процессе решения, для
Заданная сетка может быть изменена солвером в процессе решения, для
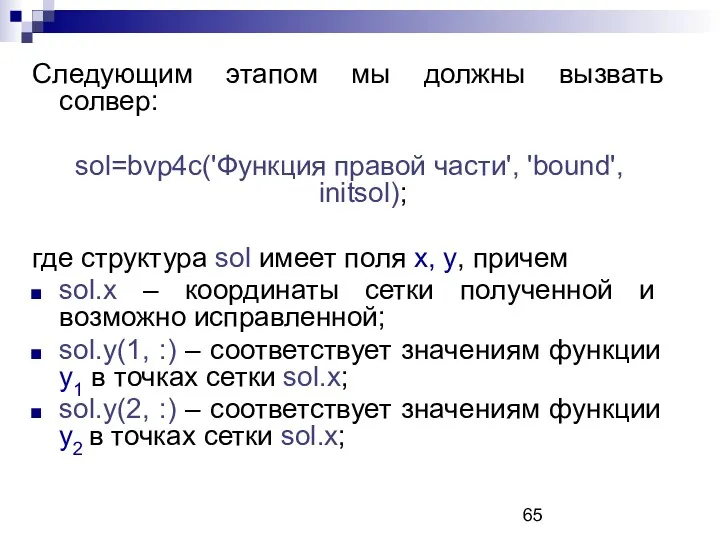
Следующим этапом мы должны вызвать солвер:
sol=bvp4c('Функция правой части', 'bound', initsol);
где
sol=bvp4c('Функция правой части', 'bound', initsol);
где
 Подобные слагаемые
Подобные слагаемые Координатная плоскость
Координатная плоскость Приёмы устных вычислений в пределах 1000
Приёмы устных вычислений в пределах 1000 Интеграл и его практическое применение
Интеграл и его практическое применение Задачи на увеличение (уменьшение) числа на несколько единиц.
Задачи на увеличение (уменьшение) числа на несколько единиц. Касательная. Уравнение касательной
Касательная. Уравнение касательной Сложение и вычитание чисел в пределах 10. Игра-тренажёр
Сложение и вычитание чисел в пределах 10. Игра-тренажёр Площадь прямоугольника, объём параллелепипеда , формулы…
Площадь прямоугольника, объём параллелепипеда , формулы… ПРЕЗЕНТАЦИЯ ОБЪЕМ
ПРЕЗЕНТАЦИЯ ОБЪЕМ Теорема Пифагора
Теорема Пифагора Компьютерный практикум по алгебре в среде Matlab
Компьютерный практикум по алгебре в среде Matlab Интерактивный тренажер Нахождение производной функции
Интерактивный тренажер Нахождение производной функции Решето Эратосфена
Решето Эратосфена Урок математики в 3 классе Масленица. Решение задач
Урок математики в 3 классе Масленица. Решение задач Свойства прямоугольных треугольников
Свойства прямоугольных треугольников Система подготовки учащихся к ОГЭ по математике
Система подготовки учащихся к ОГЭ по математике Математика о вреде курения
Математика о вреде курения Некоторые другие приемы сравнения дробей
Некоторые другие приемы сравнения дробей Осевая и центральная симметрия, 8 класс
Осевая и центральная симметрия, 8 класс Решение задач с помощью уравнений
Решение задач с помощью уравнений Системы уравнений. Система двух линейных уравнений с двумя неизвестными
Системы уравнений. Система двух линейных уравнений с двумя неизвестными Решение неравенств методом интервалов. 9 класс
Решение неравенств методом интервалов. 9 класс Study quadrilateral concepts of its elements. Quadrilaterals. lesson 1
Study quadrilateral concepts of its elements. Quadrilaterals. lesson 1 Незнайкины задачки (1 класс)
Незнайкины задачки (1 класс) Учимся выполнять умножение. урок 37. 1 класс. УМК Начальная школа 21 века
Учимся выполнять умножение. урок 37. 1 класс. УМК Начальная школа 21 века Умножение десятичных дробей на натуральные числа. 5 класс
Умножение десятичных дробей на натуральные числа. 5 класс Умножение рациональных чисел
Умножение рациональных чисел урок математики
урок математики