Кадры для цифровой промышленности. Создание законченных проектноконструкторских решений в режиме соревнований Кибердром презентация
- Кадры для цифровой промышленности. Создание законченных проектноконструкторских решений в режиме соревнований Кибердром

Содержание
- 2. Изучаемые вопросы GPS/ГЛОНАС LPS УЗ (ультразвук) LPS ИК (инфракрасный) OPT (оптический поток) ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ
- 3. Цель занятия Изучение основных систем навигации, используемых на квадрокоптере «Пионер» Выделение достоинств и недостатков каждой из
- 4. БПЛА «Пионер» ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
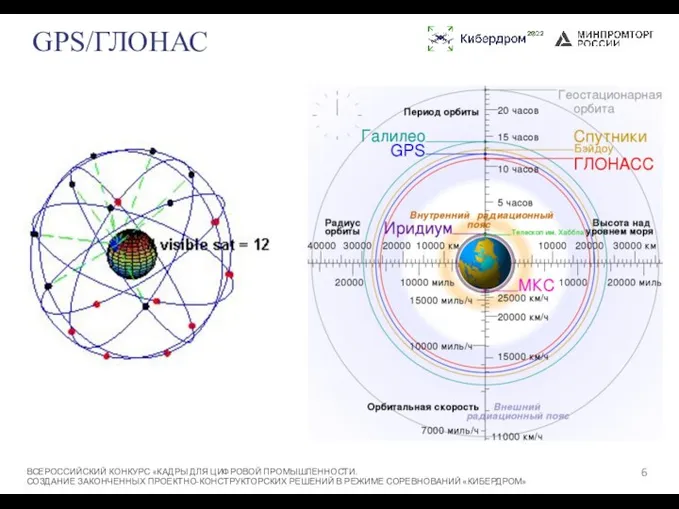
- 5. GPS/ГЛОНАС ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 6. GPS/ГЛОНАС ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 7. GPS/ГЛОНАС Точность ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
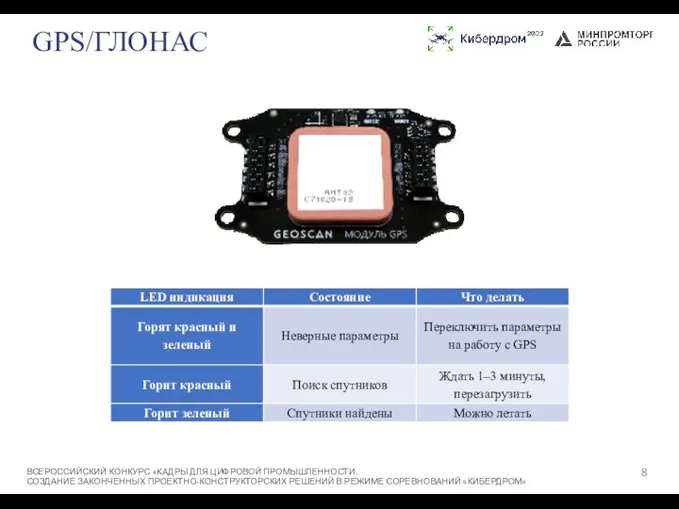
- 8. GPS/ГЛОНАС ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 9. GPS/ГЛОНАС ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ» Достоинства:
- 10. LPS УЗ ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 11. LPS УЗ ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 12. LPS УЗ Точность ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
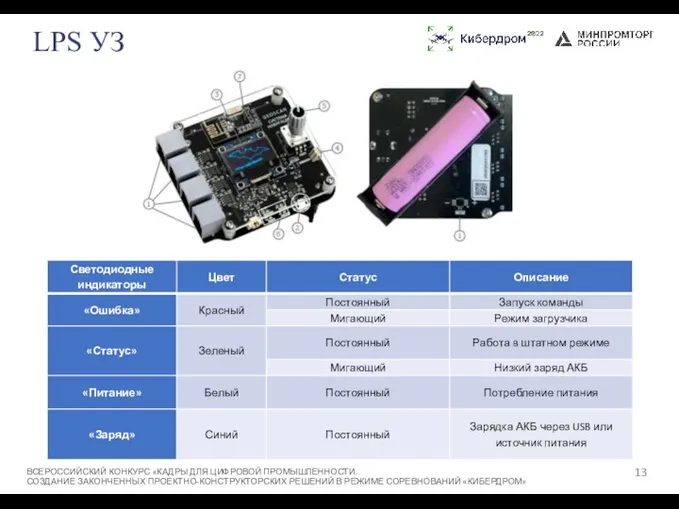
- 13. LPS УЗ ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
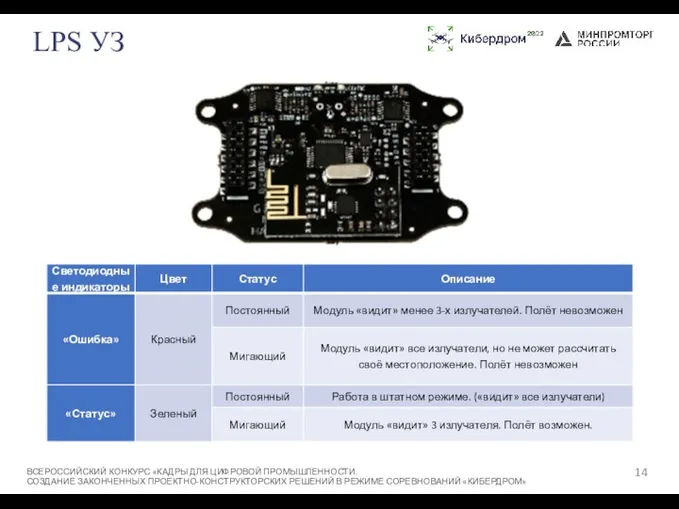
- 14. LPS УЗ ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
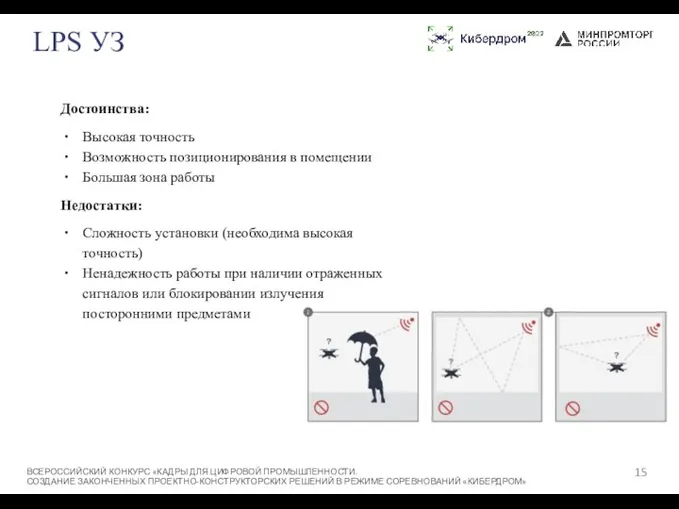
- 15. LPS УЗ ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
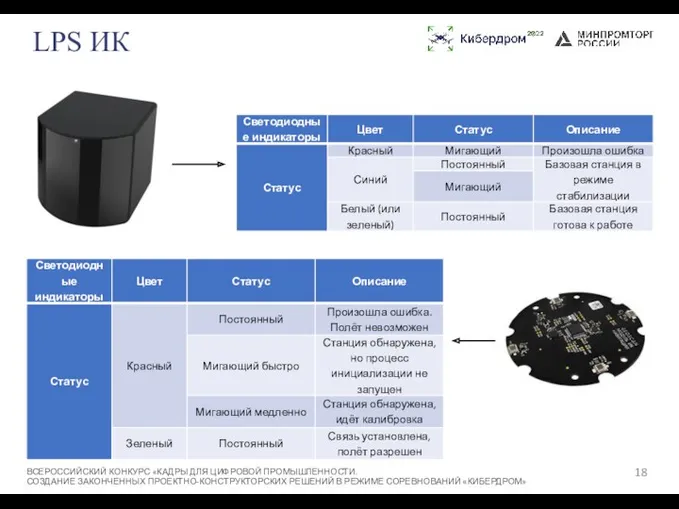
- 16. LPS ИК ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
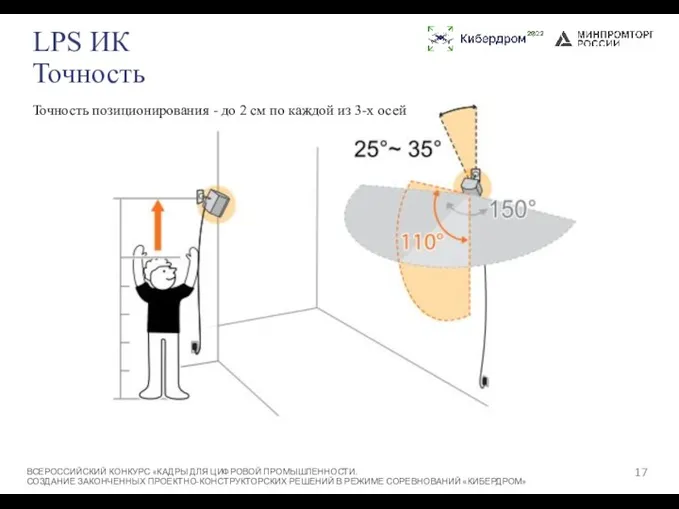
- 17. LPS ИК Точность ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ
- 18. LPS ИК ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 19. LPS ИК ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 20. OPT ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 21. OPT Точность ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ»
- 22. OPT ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ» На
- 23. OPT ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ СОРЕВНОВАНИЙ «КИБЕРДРОМ» Достоинства:
- 24. Итоги занятия Ознакомились с принципом работы основных систем позиционирования квадрокоптера Узнали достоинства и недостатки каждой из
- 25. Вопросы для самоподготовки Как определяется местоположение по GPS? В чём основное отличие системы ИК от УЗ
- 26. Домашнее задание обязательно Изучить методические указания, для лучшего понимания Узнать что такое GPS RTK и как
- 27. Дополнительные материалы Страница сайта с продуктом Геоскан Пионер [электронный ресурс] https://www.geoscan.aero/ru/products/pioneer/copter Содержание: На странице содержатся ссылки
- 29. Скачать презентацию
Изучаемые вопросы
GPS/ГЛОНАС
LPS УЗ (ультразвук)
LPS ИК (инфракрасный)
OPT (оптический поток)
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ
Изучаемые вопросы
GPS/ГЛОНАС
LPS УЗ (ультразвук)
LPS ИК (инфракрасный)
OPT (оптический поток)
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ
Цель занятия
Изучение основных систем навигации, используемых на квадрокоптере «Пионер»
Выделение достоинств и
Цель занятия
Изучение основных систем навигации, используемых на квадрокоптере «Пионер»
Выделение достоинств и
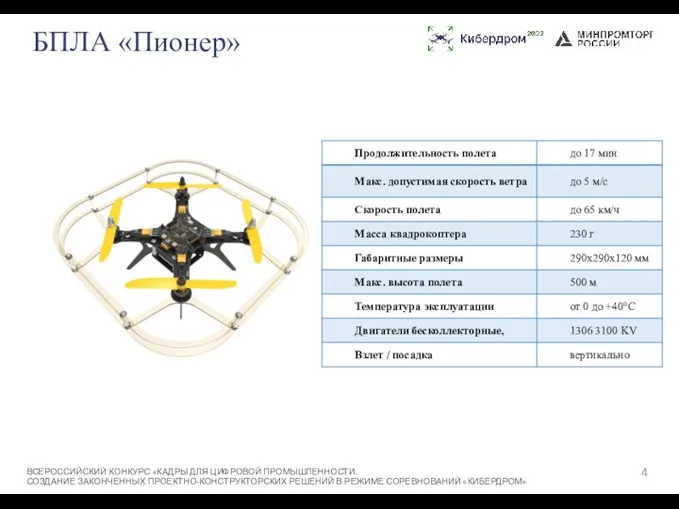
БПЛА «Пионер»
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
БПЛА «Пионер»
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
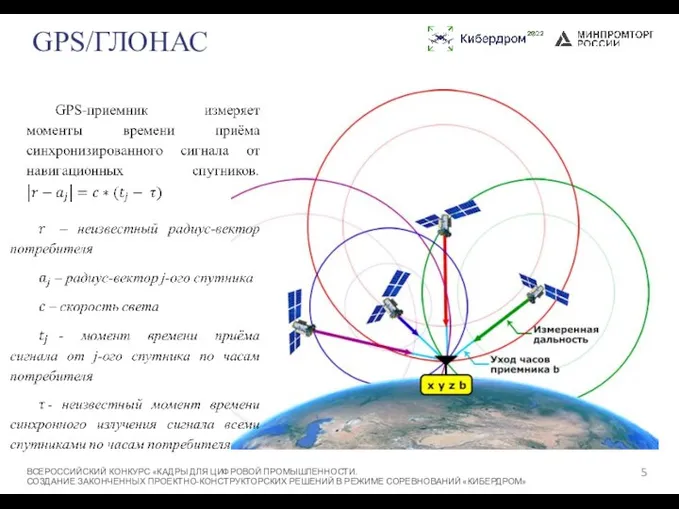
GPS/ГЛОНАС
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
GPS/ГЛОНАС
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
GPS/ГЛОНАС
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
GPS/ГЛОНАС
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
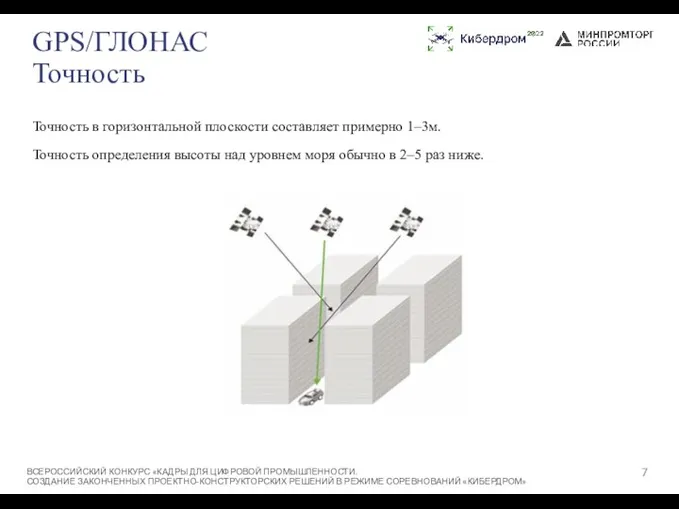
GPS/ГЛОНАС
Точность
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
GPS/ГЛОНАС
Точность
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
GPS/ГЛОНАС
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
GPS/ГЛОНАС
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
GPS/ГЛОНАС
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
GPS/ГЛОНАС
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
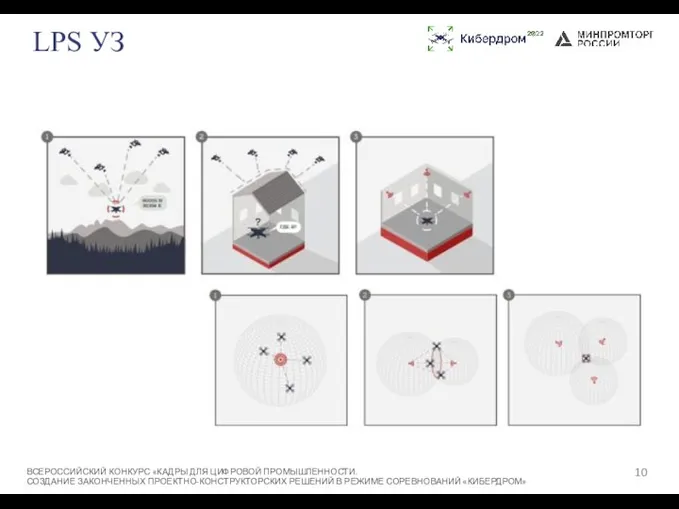
LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В

LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
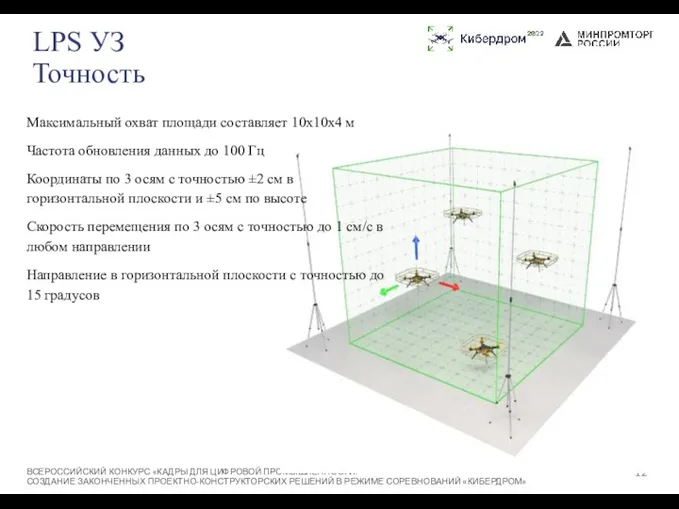
LPS УЗ
Точность
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS УЗ
Точность
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS УЗ
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В

LPS ИК
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS ИК
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS ИК
Точность
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS ИК
Точность
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS ИК
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS ИК
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS ИК
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
LPS ИК
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В
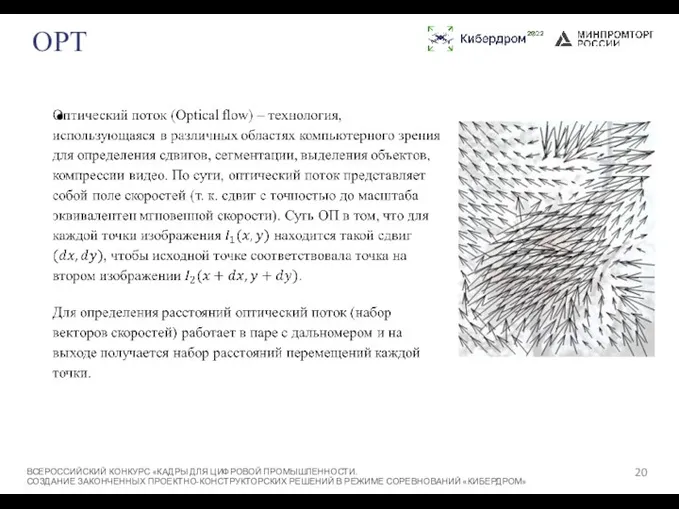
OPT
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
OPT
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
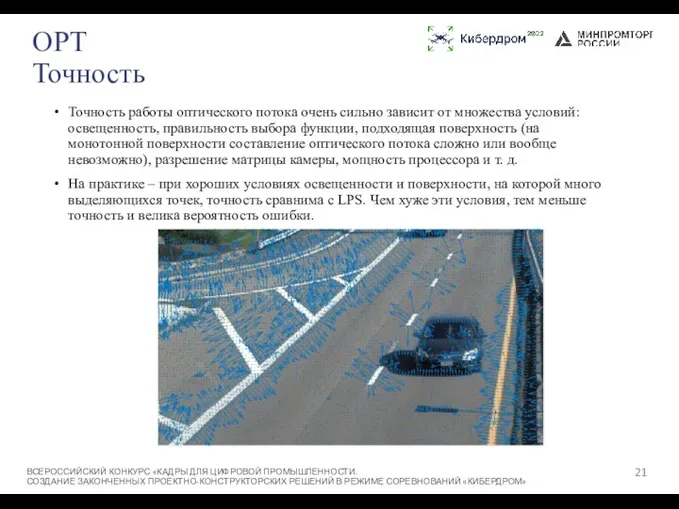
OPT
Точность
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
OPT
Точность
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
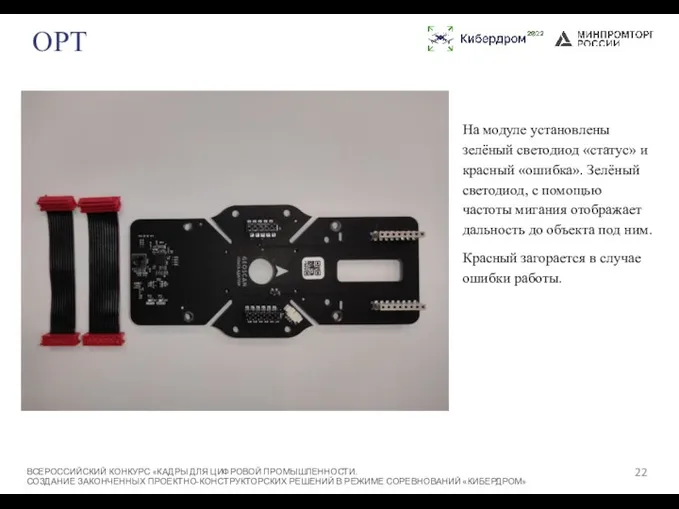
OPT
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
OPT
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
OPT
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ.
СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
OPT
ВСЕРОССИЙСКИЙ КОНКУРС «КАДРЫ ДЛЯ ЦИФРОВОЙ ПРОМЫШЛЕННОСТИ. СОЗДАНИЕ ЗАКОНЧЕННЫХ ПРОЕКТНО-КОНСТРУКТОРСКИХ РЕШЕНИЙ В РЕЖИМЕ
Итоги занятия
Ознакомились с принципом работы основных систем позиционирования квадрокоптера
Узнали достоинства и
Итоги занятия
Ознакомились с принципом работы основных систем позиционирования квадрокоптера
Узнали достоинства и
Вопросы для самоподготовки
Как определяется местоположение по GPS?
В чём основное отличие системы
Вопросы для самоподготовки
Как определяется местоположение по GPS?
В чём основное отличие системы
Домашнее задание обязательно
Изучить методические указания, для лучшего понимания
Узнать что такое GPS
Домашнее задание обязательно
Изучить методические указания, для лучшего понимания
Узнать что такое GPS
![Дополнительные материалы Страница сайта с продуктом Геоскан Пионер [электронный ресурс]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/352100/slide-26.jpg)
Дополнительные материалы
Страница сайта с продуктом Геоскан Пионер [электронный ресурс] https://www.geoscan.aero/ru/products/pioneer/copter Содержание:
Дополнительные материалы
Страница сайта с продуктом Геоскан Пионер [электронный ресурс] https://www.geoscan.aero/ru/products/pioneer/copter Содержание:
 Государственная программа РФ Развитие образования на 2013-2020 годы
Государственная программа РФ Развитие образования на 2013-2020 годы Игра- презентация В мире сказок и стихов татарского поэта Габдуллы Тукая
Игра- презентация В мире сказок и стихов татарского поэта Габдуллы Тукая Изучение национально-регионального компонента средствами музейной деятельности
Изучение национально-регионального компонента средствами музейной деятельности Изготовление плечевого изделия
Изготовление плечевого изделия Экономические и социокультурные эффекты образования
Экономические и социокультурные эффекты образования Английский алфавит
Английский алфавит Оценивание и ФГОС
Оценивание и ФГОС Совещание презентация ФГОС
Совещание презентация ФГОС МДОУ ЦРР ДС № 48 г. Истра. Паспорт объекта образования
МДОУ ЦРР ДС № 48 г. Истра. Паспорт объекта образования Образовательная среда как одно из условий, обеспечивающее доступное и качественное образование
Образовательная среда как одно из условий, обеспечивающее доступное и качественное образование Активизация учебной деятельности и повышение уровня обучености при помощи метода когнитивной визуализации дидактических объектов
Активизация учебной деятельности и повышение уровня обучености при помощи метода когнитивной визуализации дидактических объектов Проведение государственной итоговой аттестации выпускников 9 классов в 2018 году
Проведение государственной итоговой аттестации выпускников 9 классов в 2018 году Futures грамотность в образовании, системах подготовки future skills и процессах принятия решений
Futures грамотность в образовании, системах подготовки future skills и процессах принятия решений Инновационные образовательные технологии в высшей медицинской школе
Инновационные образовательные технологии в высшей медицинской школе Формы и метды духовно - нравственного воститания в реализации ФГОС
Формы и метды духовно - нравственного воститания в реализации ФГОС Спешите делать добро
Спешите делать добро Договор об организации базовой кафедры Техники и технологии
Договор об организации базовой кафедры Техники и технологии Разработка АОП с требованиями ФГОС образования обучающихся с ОВЗ
Разработка АОП с требованиями ФГОС образования обучающихся с ОВЗ доклад и презентация по теме Портфолио. Цели задачи портфолио. Его структура. Потртфолио ученика и педагога.
доклад и презентация по теме Портфолио. Цели задачи портфолио. Его структура. Потртфолио ученика и педагога. Педагогические и методические основы проектирования дополнительной общеобразовательной общеразвивающей программы
Педагогические и методические основы проектирования дополнительной общеобразовательной общеразвивающей программы Как подготовить и правильно оформить реферат и научную работу
Как подготовить и правильно оформить реферат и научную работу Should Class Attendance Be Optional for University Students
Should Class Attendance Be Optional for University Students Открытый городской социально-образовательном проект ТЕХНОМИКС как форма организации взаимодействия учреждений образования
Открытый городской социально-образовательном проект ТЕХНОМИКС как форма организации взаимодействия учреждений образования Основы учебно-исследовательской и проектной деятельности
Основы учебно-исследовательской и проектной деятельности Самостоятельная работа как средство развития математического мышления учащихся
Самостоятельная работа как средство развития математического мышления учащихся Проектирование программы внеурочной деятельности ФГОС
Проектирование программы внеурочной деятельности ФГОС Образование, как социокультурный феномен. (Тема 2)
Образование, как социокультурный феномен. (Тема 2) Программное обеспечение образовательного процесса в системе дополнительного образования детей
Программное обеспечение образовательного процесса в системе дополнительного образования детей