- :Анализ одиночного аэрофотоснимка

Содержание
- 2. ГЛОССАРИЙ М И Н И С Т Е Р С Т В О О Б Р
- 3. 1.Системы координат, применяемые в аэрофотограмметрии. Для определения взаимного положения точек применяют плоскую и пространственную систему координат.
- 4. 4. Ог Хг Уг – местная геодезическая система координат служит для определения взаимного положения точек небольших
- 5. 2. Элементы ориентирования одиночного аэроснимка. Изображение на снимке меняется с изменением взаимного расположения местности, центра проекции
- 6. 2) Величины, определяющие положение центра проекции и плоскости снимка в момент фотографирования относительно системы координат, принятой
- 7. Вторая система элементов внешнего ориентирования Во второй системе также шесть элементов внешнего ориентирования , три из
- 8. Элементы внешнего ориентирования могут быть определены непосредственно в полете в момент фотографирования, но с точностью, недостаточной
- 10. Скачать презентацию
ГЛОССАРИЙ
М И Н И С Т Е Р С Т В
ГЛОССАРИЙ
М И Н И С Т Е Р С Т В
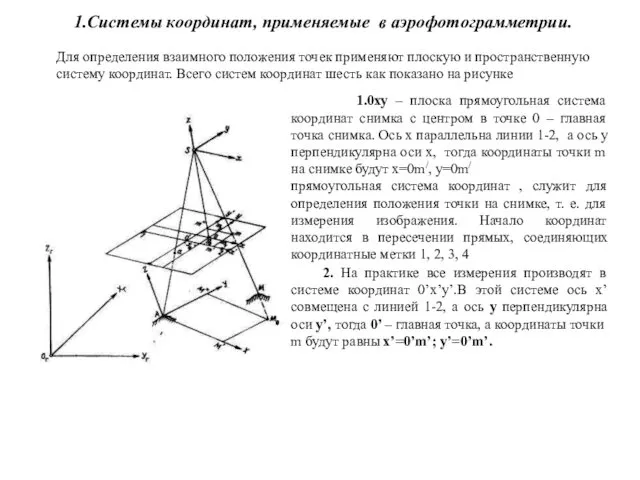
1.Системы координат, применяемые в аэрофотограмметрии.
Для определения взаимного положения точек
1.Системы координат, применяемые в аэрофотограмметрии.
Для определения взаимного положения точек
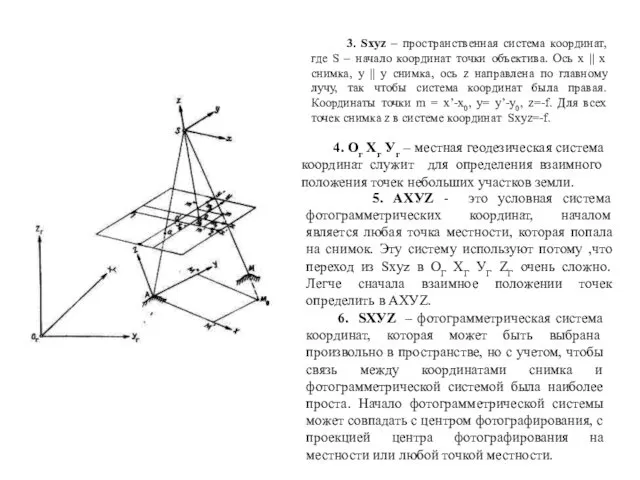
4. Ог Хг Уг – местная геодезическая система координат служит
4. Ог Хг Уг – местная геодезическая система координат служит
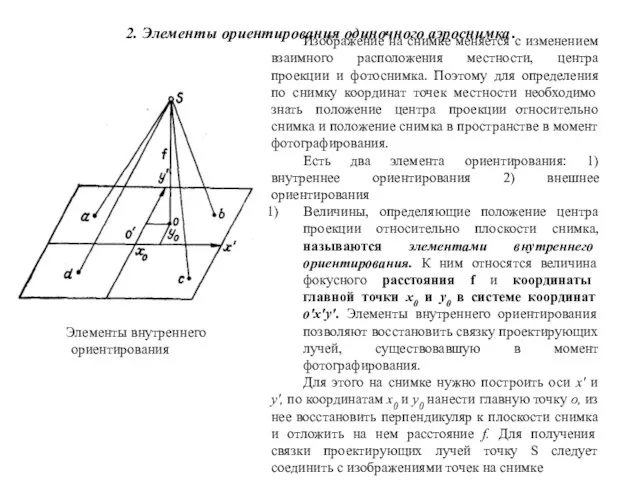
2. Элементы ориентирования одиночного аэроснимка.
Изображение на снимке меняется с изменением взаимного
2. Элементы ориентирования одиночного аэроснимка.
Изображение на снимке меняется с изменением взаимного
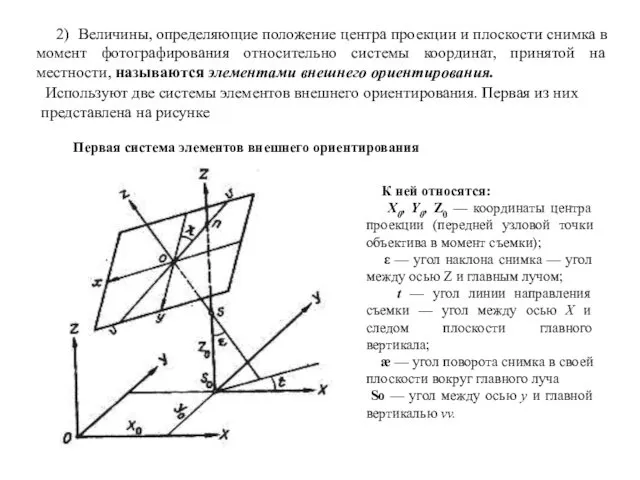
2) Величины, определяющие положение центра проекции и плоскости снимка в
2) Величины, определяющие положение центра проекции и плоскости снимка в
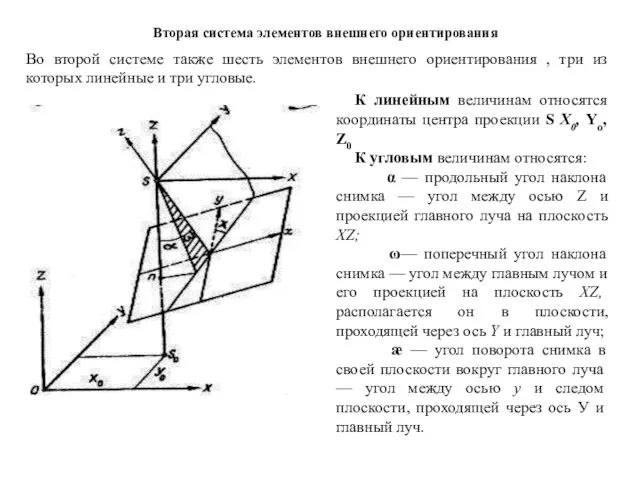
Вторая система элементов внешнего ориентирования
Во второй системе также шесть элементов
Вторая система элементов внешнего ориентирования
Во второй системе также шесть элементов
Элементы внешнего ориентирования могут быть определены непосредственно в полете в момент
Элементы внешнего ориентирования могут быть определены непосредственно в полете в момент
 Презентация группы Ёлочка
Презентация группы Ёлочка ОАО Судостроительный завод Северная верфь
ОАО Судостроительный завод Северная верфь Сравнительная характеристика гигиенических методик для пациентов с брекет-системами
Сравнительная характеристика гигиенических методик для пациентов с брекет-системами Технологии разработки Internet-приложений
Технологии разработки Internet-приложений Технология изготовления конструкций из листового проката, негабаритных емкостей, сосудов под давлением
Технология изготовления конструкций из листового проката, негабаритных емкостей, сосудов под давлением Паллиативная медицинская помощь в России и за рубежом
Паллиативная медицинская помощь в России и за рубежом Интенсификация добычи нефти зарезкой бокового ствола скважины
Интенсификация добычи нефти зарезкой бокового ствола скважины Развитие интеллектуальных умений учащихся при дифференцированном подходе в обучении
Развитие интеллектуальных умений учащихся при дифференцированном подходе в обучении Автоматизация звуков Л, Ль в стихах и скороговорках по книге Т.А Куликовской Люлим в стихах
Автоматизация звуков Л, Ль в стихах и скороговорках по книге Т.А Куликовской Люлим в стихах Отчет-презентация работы с одаренными детьми в школе
Отчет-презентация работы с одаренными детьми в школе Производство ткани
Производство ткани Участие краевом конкурсе Учитель года Алтая - 2012
Участие краевом конкурсе Учитель года Алтая - 2012 Система охлаждения ДВС
Система охлаждения ДВС ПРЕЗЕНТАЦИЯ Самообразование педагогов в ДОУ
ПРЕЗЕНТАЦИЯ Самообразование педагогов в ДОУ Города и сельские поселения
Города и сельские поселения Внешняя политика Ивана Грозного. Основные направления
Внешняя политика Ивана Грозного. Основные направления Презентация (продолжение) к уроку:Степень.Квадрат и куб числа
Презентация (продолжение) к уроку:Степень.Квадрат и куб числа Плесень и условия ее появления. 6 класс
Плесень и условия ее появления. 6 класс Среднее арифметическое чисел
Среднее арифметическое чисел Слушание музыки 1 класс 3 урок
Слушание музыки 1 класс 3 урок Токсические эффекты витамина Д
Токсические эффекты витамина Д Занятость и безработица
Занятость и безработица Музика епохи Відродження
Музика епохи Відродження Актуальные вопросы ведения бюджетного и казначейского учета и составления отчетности по исполнению федерального бюджета
Актуальные вопросы ведения бюджетного и казначейского учета и составления отчетности по исполнению федерального бюджета Заготовка силоса
Заготовка силоса История метро
История метро Материал посвящен ВОВ
Материал посвящен ВОВ vyezdnaya_prezentatsia_AP
vyezdnaya_prezentatsia_AP