- Автоматизация управления в технических системах

Содержание
- 2. Модуль 1. Введение, история, основные понятия и определения, принципы построения, классификация автоматизированных систем управления Вопрос 1.
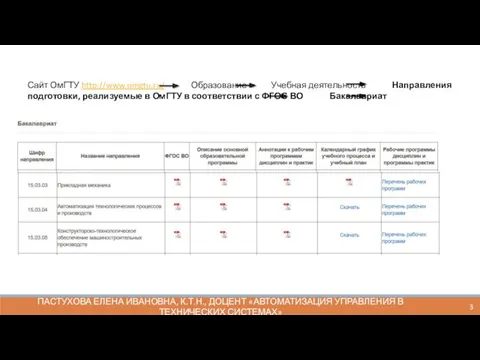
- 3. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Сайт ОмГТУ http://www.omgtu.ru/ Образование Учебная деятельность
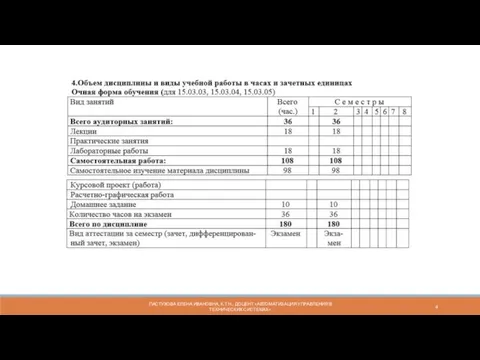
- 4. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
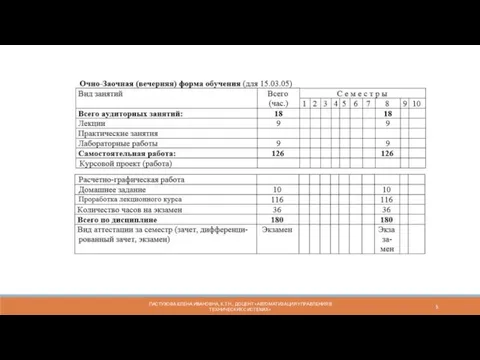
- 5. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
- 6. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Домашнее задание (реферат) – 10 часов
- 7. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
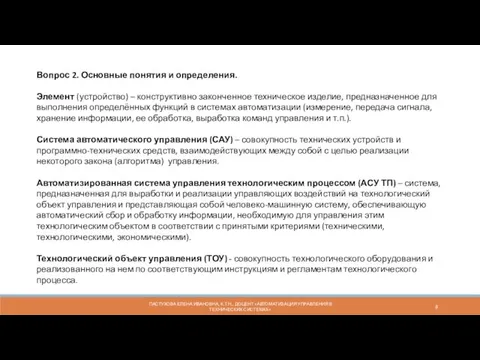
- 8. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Вопрос 2. Основные понятия и определения.
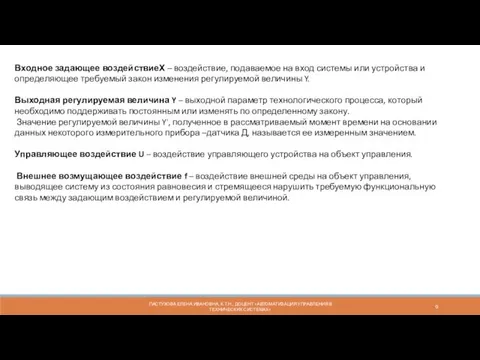
- 9. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Входное задающее воздействиеХ – воздействие, подаваемое
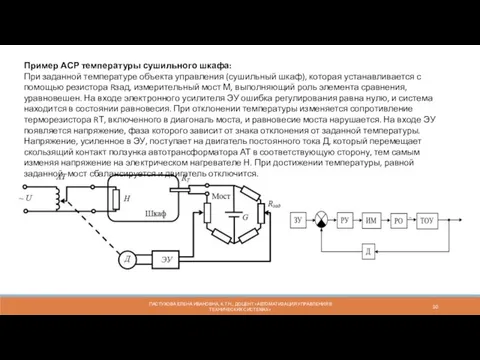
- 10. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Пример АСР температуры сушильного шкафа: При
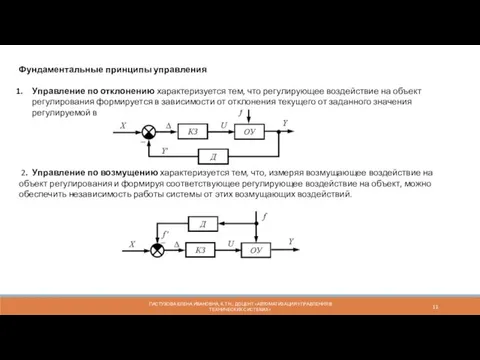
- 11. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Фундаментальные принципы управления Управление по отклонению
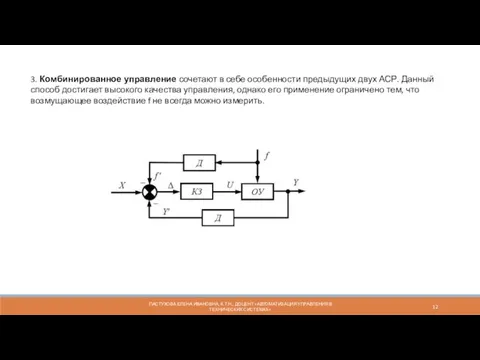
- 12. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» 3. Комбинированное управление сочетают в себе
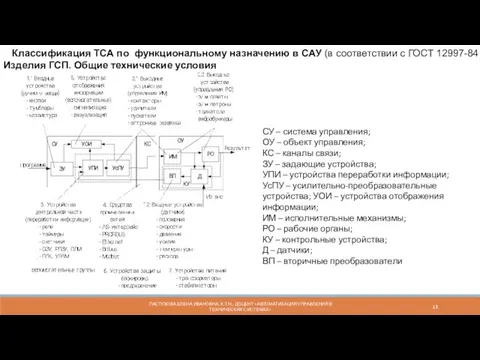
- 13. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Классификация ТСА по функциональному назначению в
- 14. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Государственная система приборов (ГСП)
- 15. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Классификация элементов АСР 1 По функциональному
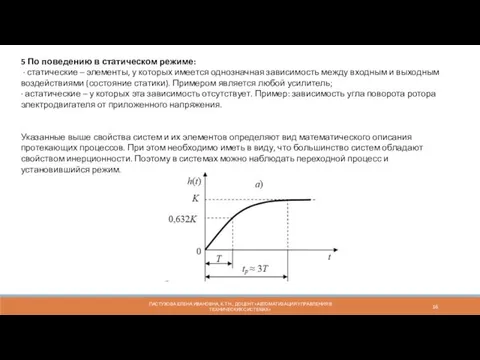
- 16. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» 5 По поведению в статическом режиме:
- 17. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Классификация АСР по функциональным, структурным или
- 18. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» 4 По количеству контуров: · одноконтурные–
- 19. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» 8 По характеру математических соотношений: ·
- 20. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Основные принципы построения ТСА Для построения
- 21. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» Унификация – это приведение различных видов
- 22. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» ПИРАМИДА УПРАВЛЕНИЯ СОВРЕМЕННЫМ ПРОИЗВОДСТВОМ ЕRP –
- 23. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» ПИРАМИДА УПРАВЛЕНИЯ СОВРЕМЕННЫМ ПРОИЗВОДСТВОМ
- 24. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» На следующих трех уровнях решаются задачи,
- 25. ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ» История зарождения и развития систем автоматического
- 27. Скачать презентацию
Модуль 1. Введение, история, основные понятия и определения, принципы построения, классификация
Модуль 1. Введение, история, основные понятия и определения, принципы построения, классификация
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Сайт ОмГТУ
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Сайт ОмГТУ
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Домашнее задание
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Домашнее задание
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Вопрос 2.
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Вопрос 2.
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Входное задающее
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Входное задающее
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Пример АСР
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Пример АСР
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Фундаментальные принципы
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Фундаментальные принципы
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
3. Комбинированное
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
3. Комбинированное
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Классификация ТСА
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Классификация ТСА
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Государственная система
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Государственная система

ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Классификация элементов
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Классификация элементов
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
5 По
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
5 По
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Классификация АСР
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Классификация АСР
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
4 По
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
4 По

ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
8 По
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
8 По
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Основные принципы
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Основные принципы
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Унификация –
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Унификация –
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПИРАМИДА УПРАВЛЕНИЯ
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПИРАМИДА УПРАВЛЕНИЯ

ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПИРАМИДА УПРАВЛЕНИЯ
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПИРАМИДА УПРАВЛЕНИЯ
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
На следующих
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
На следующих
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
История зарождения
ПАСТУХОВА ЕЛЕНА ИВАНОВНА, К.Т.Н., ДОЦЕНТ «АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ В ТЕХНИЧЕСКИХ СИСТЕМАХ»
История зарождения
 ТЕСТЫ ПО ГЕОГРАФИИ ДЛЯ 8 КЛАССА ПО ТЕМЕ ВНУТРЕННИЕ ВОДЫ РОССИИ
ТЕСТЫ ПО ГЕОГРАФИИ ДЛЯ 8 КЛАССА ПО ТЕМЕ ВНУТРЕННИЕ ВОДЫ РОССИИ Зачем идти в интернет?
Зачем идти в интернет? Lexema ERP v2 (4)
Lexema ERP v2 (4) Создание визуальных компонентов
Создание визуальных компонентов Презентация к уроку химии в 8 классе по теме Растворы
Презентация к уроку химии в 8 классе по теме Растворы Краска de luxe - новые оттенки
Краска de luxe - новые оттенки 20230918_slaydy_k_uroku
20230918_slaydy_k_uroku Тест с подсказками для закрепления знаний по теме Кислоты (8 класс)
Тест с подсказками для закрепления знаний по теме Кислоты (8 класс) Корзинка на Пасху
Корзинка на Пасху Нефтяные проблемы на Каспии и вопросы преодоления экологических угроз и рисков Прикаспийского региона
Нефтяные проблемы на Каспии и вопросы преодоления экологических угроз и рисков Прикаспийского региона Классный час Поговорим о толерантности
Классный час Поговорим о толерантности Памятники природы национального парка ТАГАНАЙ
Памятники природы национального парка ТАГАНАЙ Уголок настроения
Уголок настроения Русь во времена политической раздробленности
Русь во времена политической раздробленности Сравнение окон ALT F50 и СИАЛ
Сравнение окон ALT F50 и СИАЛ Песочное тесто и изделия из него
Песочное тесто и изделия из него Мастер-класс Бегущий барашек
Мастер-класс Бегущий барашек Милосердие и сострадание
Милосердие и сострадание Жизненный путь Чехова
Жизненный путь Чехова Презентация Притча о доброте
Презентация Притча о доброте Курс занятий Олимпиада
Курс занятий Олимпиада Презентация к собранию родителей будущих первоклассников
Презентация к собранию родителей будущих первоклассников Проектная деятельность учащихся на уроках музыки
Проектная деятельность учащихся на уроках музыки Послеродовые гнойно-септические заболевания (перитонит, сепсис, токсико-инфекционный шок)
Послеродовые гнойно-септические заболевания (перитонит, сепсис, токсико-инфекционный шок) Семь чудес света
Семь чудес света Легочная гипертензия
Легочная гипертензия Разработка родительского собрания Наши дети не для насилия
Разработка родительского собрания Наши дети не для насилия Взаимосвязь урочной и внеурочной деятельности
Взаимосвязь урочной и внеурочной деятельности