- Бортовые комплексы радиоэлектронной борьбы. Основы построения комплексов РЭБ

Содержание
- 2. Тема 10. ОСНОВЫ ПОСТРОЕНИЯ КОМПЛЕКСОВ РЭБ 2 10.5. Основные подсистемы БКО 10.5.1. Подсистема информационного обеспечения
- 3. Основу ПИО составляют В состав ПИО могут входить СНРТР 1 аппаратура разведки в ИК и оптическом
- 4. ПИО решает следующие задачи: производит обнаружение сигналов облучающих РЭС; измеряет параметры обнаруженных сигналов; 4 определяет тип
- 5. Информация о РЭ обстановке поступает в БКО не только от собственных средств РЭР, но и по
- 6. 10.5.2. Подсистема управления 6
- 7. Во время преодоления ПВО ПУ решает задачи: принимает решение о способах РЭБ, определяет опасные и ГЦ
- 8. Рис. 1. Схема трехуровневой системы управления комплексом РЭБ 8
- 9. Три уровня управления (прямой, функциональный и организационный) характеризуются четкой системой подчиненности по принципу «сверху-вниз» верхняя управляющая
- 10. Требования к адаптивному комплексу РЭБ наличие гибкой структуры для адаптации к быстро меняющейся обстановке 1 применение
- 11. Рис. 2. Структурная схема замкнутой системы РЭБ 11
- 12. Внедрение цифровых устройств обработки сигналов выявило их существенные преимущества перед аналоговыми системами: уменьшились габариты и масса
- 13. Рис. 3. Структурная схема ПУ комплекса РЭБ 13
- 14. СП – специализированный процессор; ФЦУ – формуляр ЦУ; УС – устройство сопряжения; Д1 и Д2 –
- 15. Программный принцип управления закладывается в БКО на этапе проектирования. Изменения в программе могут производиться в процессе
- 16. Адаптивный принцип управления позволяет наиболее полно реализовать потенциальные возможности БКО, но требует достоверного опознавания типа атакующего
- 17. Идентификация угрожающих РЛС производится на основе анализа их сигналов, перехватываемых СРТР. Сигналы проходят «инвентаризацию» в предварительном
- 18. Управление БКО производит БЦВМ, входящая в ПУ. ПУ осуществляет автоматическую смену программ работы комплекса в зависимости
- 19. 10.5.3. Подсистема исполнительных устройств ПИУ предназначена для решения задач радио- и оптико-электронного подавления или поражения РЭС;
- 20. САП различных диапазонов ЭВМ, создающие помехи РЛС, КРУ и линиям связи, СГО, РНС станции (средства) ОЭП
- 21. Части РЭБ с самолетными средствами 21 «Красуха-2» «Москва-1» «Красуха-4» «Пародист»
- 22. Рис. 5. Вариант структурной схемы автоматической САП ПРМ НРТР – приемник станции непосредственной РТР; ГВЧ –
- 23. Рис. 6. Схема САП с управляемой мощностью излучения ВУУ – входное усилительное устройство; ВхУПЧ, ВУПЧ –
- 24. 10.5.4. Подсистема контроля 24
- 25. ПК БКО выполняет функции: Под состоянием БКО понимается степень соответствия требованиям или параметрам, установленным нормативно-технической документацией
- 26. СВК могут быть использованы для: поиска отказавших элементов 1 прогнозирования состояния 2 автоматической коррекции параметров 3
- 27. 10.6. Показатели эффективности БКО Леньшин А.В. Бортовые комплексы радиоэлектронной борьбы: Учебное пособие. – Воронеж: ВУНЦ ВВС
- 28. 10.7. Научно-технические проблемы обеспечения жизненного цикла авиационной техники РЭБ Леньшин А.В. Бортовые комплексы обороны самолетов и
- 30. Скачать презентацию
Тема 10.
ОСНОВЫ ПОСТРОЕНИЯ КОМПЛЕКСОВ РЭБ
2
10.5. Основные подсистемы БКО
10.5.1. Подсистема информационного
Тема 10.
ОСНОВЫ ПОСТРОЕНИЯ КОМПЛЕКСОВ РЭБ
2
10.5. Основные подсистемы БКО 10.5.1. Подсистема информационного

Основу ПИО составляют
В состав ПИО могут входить
СНРТР
1
аппаратура разведки в ИК
Основу ПИО составляют
В состав ПИО могут входить
СНРТР
1
аппаратура разведки в ИК
ПИО решает следующие задачи:
производит обнаружение сигналов облучающих РЭС;
измеряет параметры обнаруженных сигналов;
4
определяет
ПИО решает следующие задачи:
производит обнаружение сигналов облучающих РЭС;
измеряет параметры обнаруженных сигналов;
4
определяет
Информация о РЭ обстановке поступает в БКО не только от собственных
Информация о РЭ обстановке поступает в БКО не только от собственных
10.5.2. Подсистема управления
6
10.5.2. Подсистема управления
6
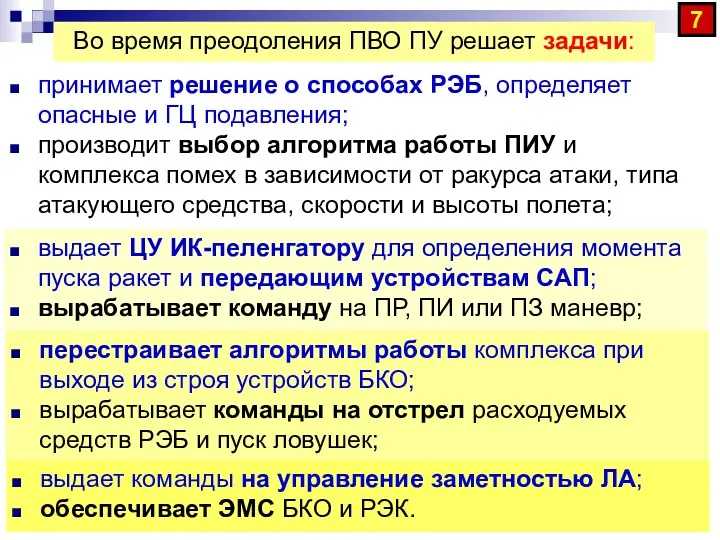
Во время преодоления ПВО ПУ решает задачи:
принимает решение о способах РЭБ,
Во время преодоления ПВО ПУ решает задачи:
принимает решение о способах РЭБ,

Рис. 1. Схема трехуровневой системы управления комплексом РЭБ
8
Рис. 1. Схема трехуровневой системы управления комплексом РЭБ
8
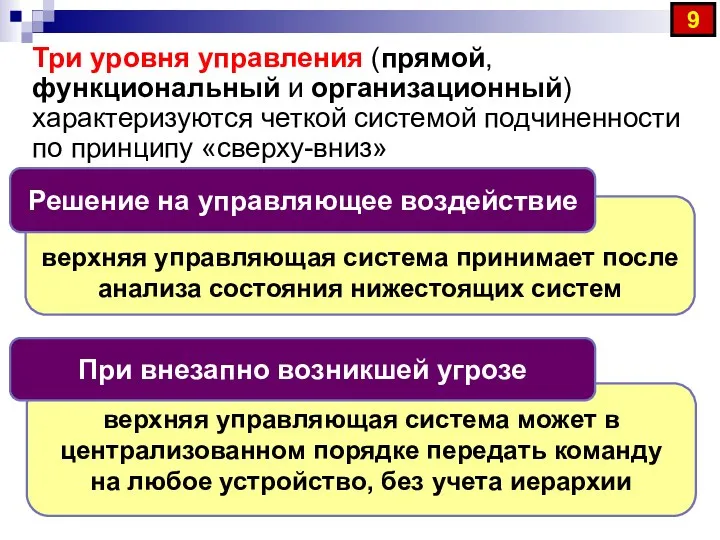
Три уровня управления (прямой, функциональный и организационный) характеризуются четкой системой подчиненности
Три уровня управления (прямой, функциональный и организационный) характеризуются четкой системой подчиненности
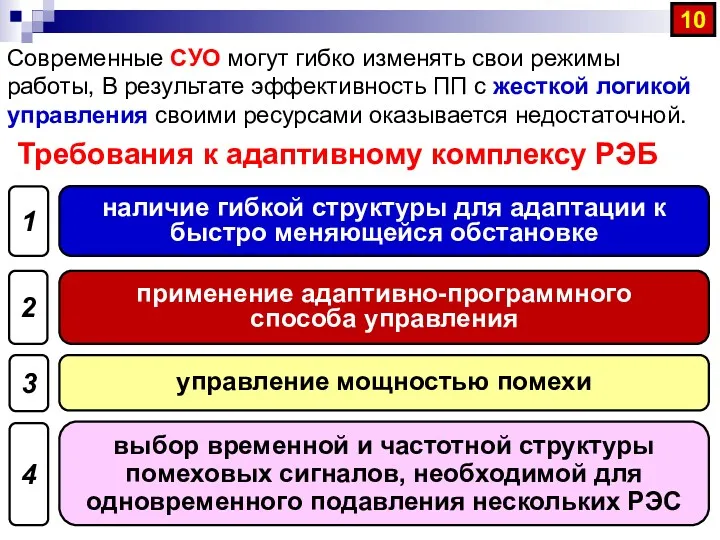
Требования к адаптивному комплексу РЭБ
наличие гибкой структуры для адаптации к быстро
Требования к адаптивному комплексу РЭБ
наличие гибкой структуры для адаптации к быстро
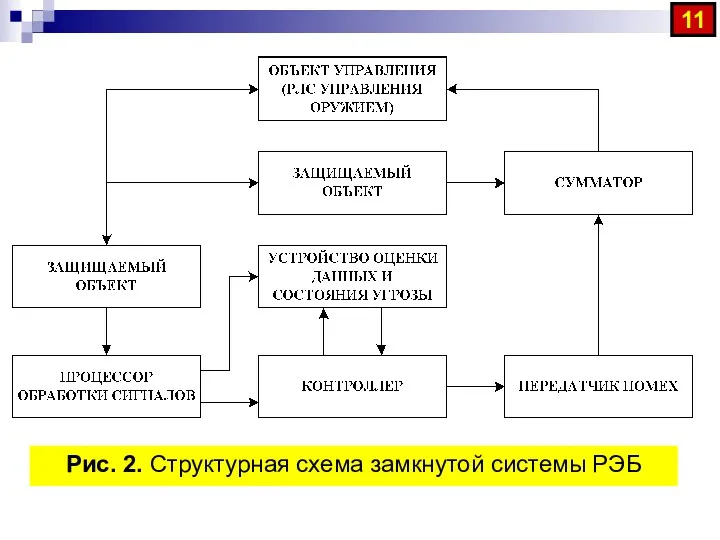
Рис. 2. Структурная схема замкнутой системы РЭБ
11
Рис. 2. Структурная схема замкнутой системы РЭБ
11
Внедрение цифровых устройств обработки сигналов выявило их существенные преимущества перед аналоговыми
Внедрение цифровых устройств обработки сигналов выявило их существенные преимущества перед аналоговыми

Рис. 3. Структурная схема ПУ комплекса РЭБ
13
Рис. 3. Структурная схема ПУ комплекса РЭБ
13
СП – специализированный процессор;
ФЦУ – формуляр ЦУ; УС – устройство
СП – специализированный процессор;
ФЦУ – формуляр ЦУ; УС – устройство
Программный принцип управления закладывается в БКО на этапе проектирования. Изменения в
Программный принцип управления закладывается в БКО на этапе проектирования. Изменения в
Адаптивный принцип управления позволяет наиболее полно реализовать потенциальные возможности БКО, но
Адаптивный принцип управления позволяет наиболее полно реализовать потенциальные возможности БКО, но
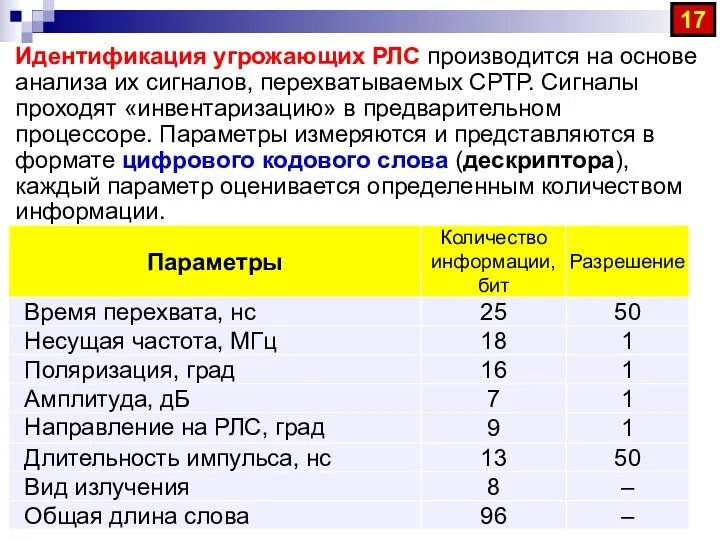
Идентификация угрожающих РЛС производится на основе анализа их сигналов, перехватываемых СРТР.
Идентификация угрожающих РЛС производится на основе анализа их сигналов, перехватываемых СРТР.
Управление БКО производит БЦВМ, входящая в ПУ. ПУ осуществляет автоматическую смену
Управление БКО производит БЦВМ, входящая в ПУ. ПУ осуществляет автоматическую смену
10.5.3. Подсистема исполнительных устройств
ПИУ предназначена для решения задач
радио- и оптико-электронного
10.5.3. Подсистема исполнительных устройств
ПИУ предназначена для решения задач
радио- и оптико-электронного
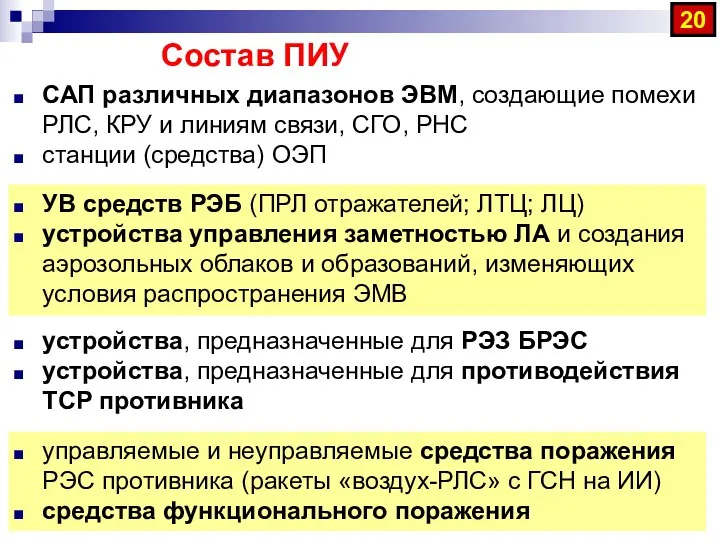
САП различных диапазонов ЭВМ, создающие помехи РЛС, КРУ и линиям связи,
САП различных диапазонов ЭВМ, создающие помехи РЛС, КРУ и линиям связи,

Части РЭБ с самолетными средствами
21
«Красуха-2»
«Москва-1»
«Красуха-4»
«Пародист»
Части РЭБ с самолетными средствами
21
«Красуха-2»
«Москва-1»
«Красуха-4»
«Пародист»

Рис. 5. Вариант структурной схемы автоматической САП
ПРМ НРТР – приемник станции
Рис. 5. Вариант структурной схемы автоматической САП
ПРМ НРТР – приемник станции
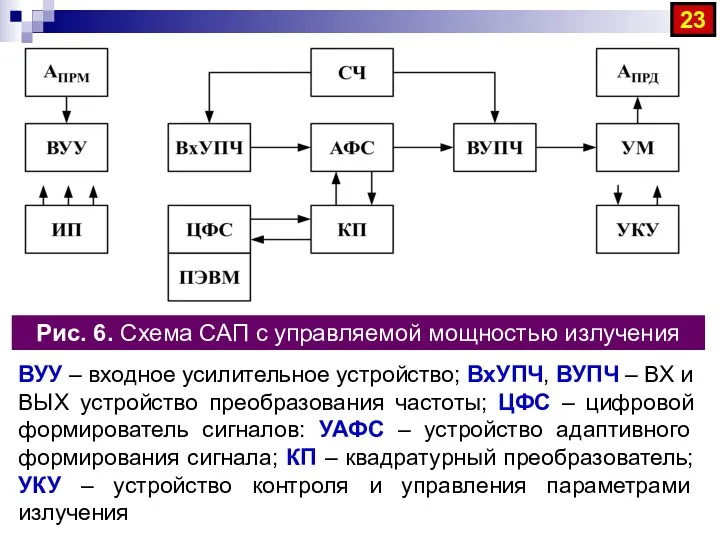
Рис. 6. Схема САП с управляемой мощностью излучения
ВУУ – входное усилительное
Рис. 6. Схема САП с управляемой мощностью излучения
ВУУ – входное усилительное
10.5.4. Подсистема контроля
24
10.5.4. Подсистема контроля
24
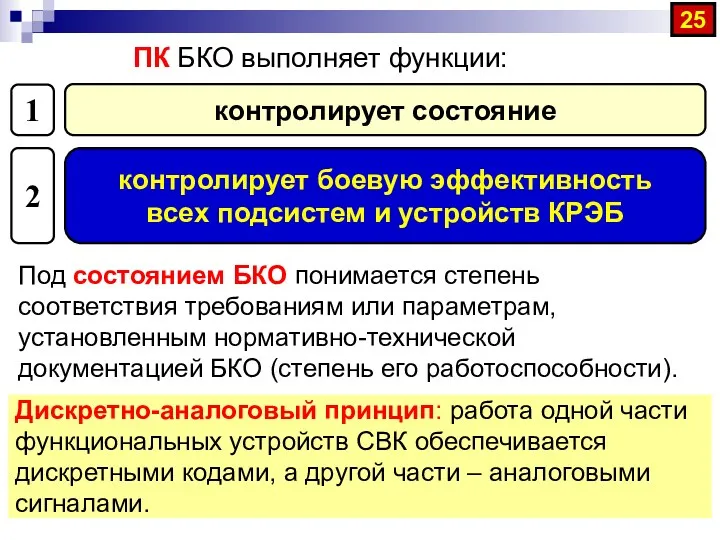
ПК БКО выполняет функции:
Под состоянием БКО понимается степень соответствия требованиям
ПК БКО выполняет функции:
Под состоянием БКО понимается степень соответствия требованиям

СВК могут быть использованы для:
поиска отказавших элементов
1
прогнозирования состояния
2
автоматической коррекции параметров
3
определения
СВК могут быть использованы для:
поиска отказавших элементов
1
прогнозирования состояния
2
автоматической коррекции параметров
3
определения
10.6. Показатели эффективности БКО
Леньшин А.В. Бортовые комплексы радиоэлектронной борьбы: Учебное
10.6. Показатели эффективности БКО
Леньшин А.В. Бортовые комплексы радиоэлектронной борьбы: Учебное
10.7. Научно-технические проблемы обеспечения жизненного цикла авиационной техники РЭБ
Леньшин А.В. Бортовые
10.7. Научно-технические проблемы обеспечения жизненного цикла авиационной техники РЭБ
Леньшин А.В. Бортовые
 Огнеборцы. Правила противопожарной безопасности в школе
Огнеборцы. Правила противопожарной безопасности в школе Л.Н.Толстой
Л.Н.Толстой Блокада длилась с 8 сентября 1941 года по 27 января 1944 года
Блокада длилась с 8 сентября 1941 года по 27 января 1944 года Развивающий коврик Городок
Развивающий коврик Городок Энергетика – тарихи, әлеуметтік және экологиялык аспектілері. Казахстан республика энергетикасынын замануй тенденциялары
Энергетика – тарихи, әлеуметтік және экологиялык аспектілері. Казахстан республика энергетикасынын замануй тенденциялары Хользунов Виктор Степанович
Хользунов Виктор Степанович 20231026_masshtab._ploshchad_kruga
20231026_masshtab._ploshchad_kruga Особо охраняемые природные территории и их значение в охране природы
Особо охраняемые природные территории и их значение в охране природы Деловая игра для педагогов
Деловая игра для педагогов Материалы для оклеивания стен
Материалы для оклеивания стен Нәрестелердегі жедел перитонит
Нәрестелердегі жедел перитонит Конструирование украшения на основе формы волны и спирали
Конструирование украшения на основе формы волны и спирали Презентаци по теме Чибис - птица года, для 2-4 классов
Презентаци по теме Чибис - птица года, для 2-4 классов презентация вулканы и источники
презентация вулканы и источники Географическая карта
Географическая карта Социальная стратификация социалистического общества
Социальная стратификация социалистического общества Быть разработчиком: вызовы, ожидания, перестроение мозгов
Быть разработчиком: вызовы, ожидания, перестроение мозгов Карбонильные соединения и карбоновые кислоты. Лекция № 4
Карбонильные соединения и карбоновые кислоты. Лекция № 4 Этиопатогенез нарушений функции щитовидной и паращитовидной желез
Этиопатогенез нарушений функции щитовидной и паращитовидной желез Конституционное право
Конституционное право Преподаватель глазами студентов
Преподаватель глазами студентов Шпалы и брусья
Шпалы и брусья Водевиль Золушка. Сказка-мюзикл от 9 класса
Водевиль Золушка. Сказка-мюзикл от 9 класса Лазерная резка металлов
Лазерная резка металлов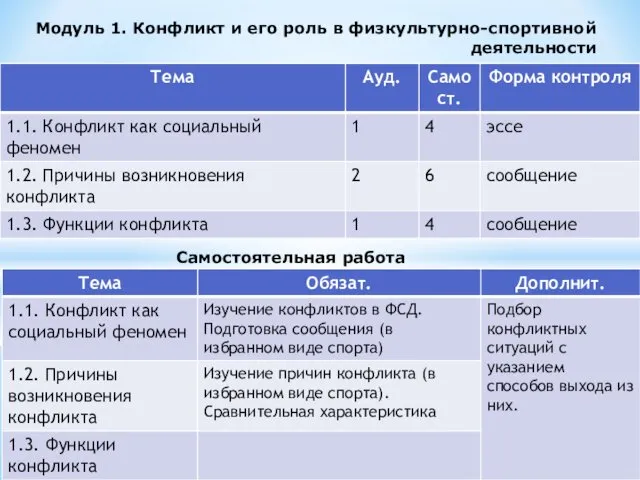 Конфликт и его роль в физкультурно-спортивной деятельности
Конфликт и его роль в физкультурно-спортивной деятельности Электрический ток в полупроводниках
Электрический ток в полупроводниках Числовые промежутки. 8 класс
Числовые промежутки. 8 класс Социально - бытовая ориентировка. (6 класс)
Социально - бытовая ориентировка. (6 класс)