- Динамический анализ и синтез в робототехнике

Содержание
- 2. Динамический анализ механизмов Задачи динамики: прямая задача: по заданным силам и моментам определить обобщенные ускорения, интегрирование
- 3. Основные понятия и определения Машина – техническое устройство, в результате осуществления технологического процесса определенного рода, можно
- 4. Силы и моменты, действующие в машинном агрегате 1. Движущиеся силы и моменты Fд и Мд Работа
- 5. Понятие о механических характеристиках Механическая характеристика 3-х фазного асинхронного двигателя. Индикаторная диаграмма ДВС Индикаторная диаграмма насоса
- 6. Понятие о расчетной схеме машинного агрегата и переход от неё к динамической модели Если жесткость с1
- 7. Приведение сил и масс к одномассовой динамической модели ϕ1 – обобщенная координата. Нужно определить закон движения
- 8. Приведение сил и масс к одномассовой динамической модели (продолжение) В нашем случае: ωм = ω1 Определим
- 9. Приведение сил и масс к одномассовой динамической модели (продолжение) 2. Приведение сил. АΣ – работа суммарного
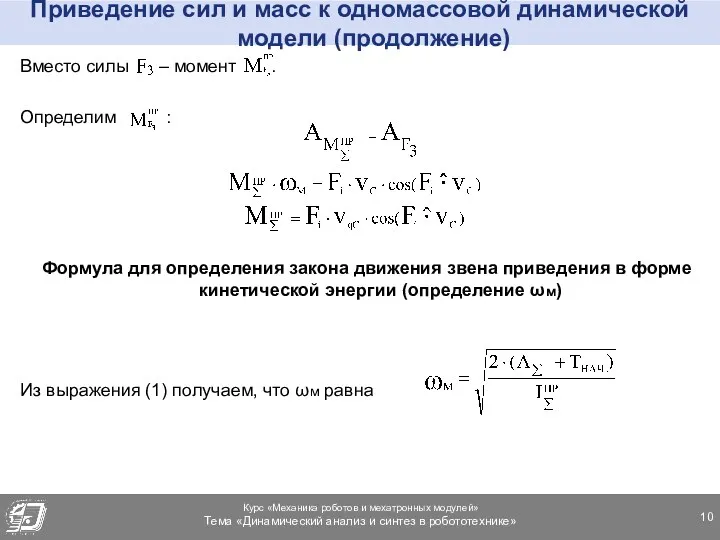
- 10. Приведение сил и масс к одномассовой динамической модели (продолжение) Вместо силы – момент . Определим :
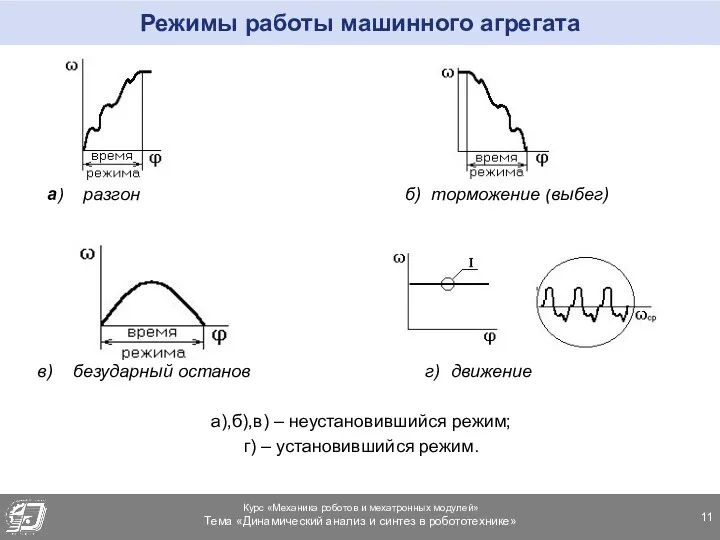
- 11. Режимы работы машинного агрегата а) разгон б) торможение (выбег) в) безударный останов г) движение а),б),в) –
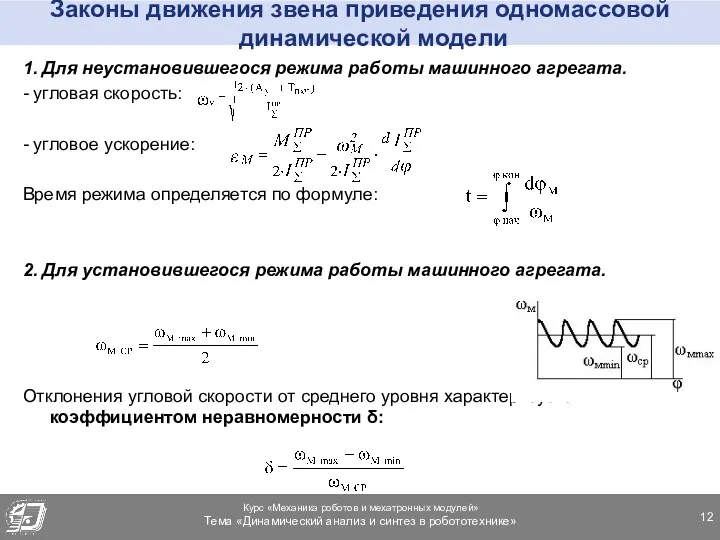
- 12. Законы движения звена приведения одномассовой динамической модели 1. Для неустановившегося режима работы машинного агрегата. - угловая
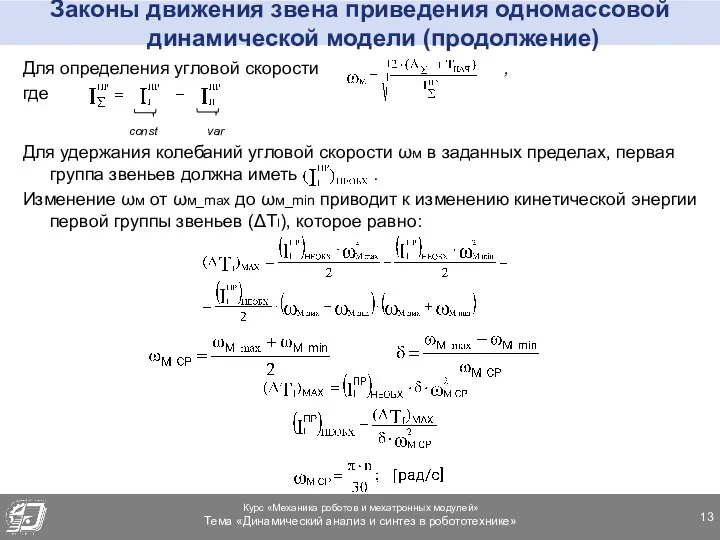
- 13. Законы движения звена приведения одномассовой динамической модели (продолжение) Для определения угловой скорости , где const var
- 14. Определение реакций в кинематических парах рычажных механизмов без учета трения Данная задача может быть решена: аналитическим
- 15. Определение реакций в кинематических парах рычажных механизмов без учета трения (продолжение) Звено 3 При решении задачи
- 16. Определение реакций в кинематических парах рычажных механизмов без учета трения (продолжение) О b A x
- 17. Учет трения при определении реакций в кинематических парах Трение является сложным физико-химическим процессом, сопровождающийся выделением тепла.
- 18. Учет трения во вращательной кинематической паре 1 - цапфа rц - радиус цапфы Δ - зазор
- 19. Динамический анализ механизмов Предметом динамики манипулятора как раздела робототехники является математическое описание действующих на манипулятор сил
- 20. Методы построения динамической модели манипулятора 1. Метод Лагранжа-Эйлера Уравнения Лагранжа – Эйлера обеспечивают строгое описание динамики
- 21. Уравнения динамики манипулятора Уравнения Лагранжа второго рода для голономной системы с n степенями свободы, которым отвечают
- 22. Уравнения динамики манипулятора (продолжение) Определим Тi по формуле: (5) Если за полюс звена принять его центр
- 23. Уравнения динамики манипулятора (продолжение) Определим вектор скорости центра инерции звена i через проекции на оси связанной
- 24. Заключение При решении задач динамики необходимо построить динамическую модель многозвенного механизма (манипулятора). В качестве динамической характеристики
- 26. Скачать презентацию
Динамический анализ механизмов
Задачи динамики:
прямая задача: по заданным силам и моментам определить
Динамический анализ механизмов
Задачи динамики:
прямая задача: по заданным силам и моментам определить
Основные понятия и определения
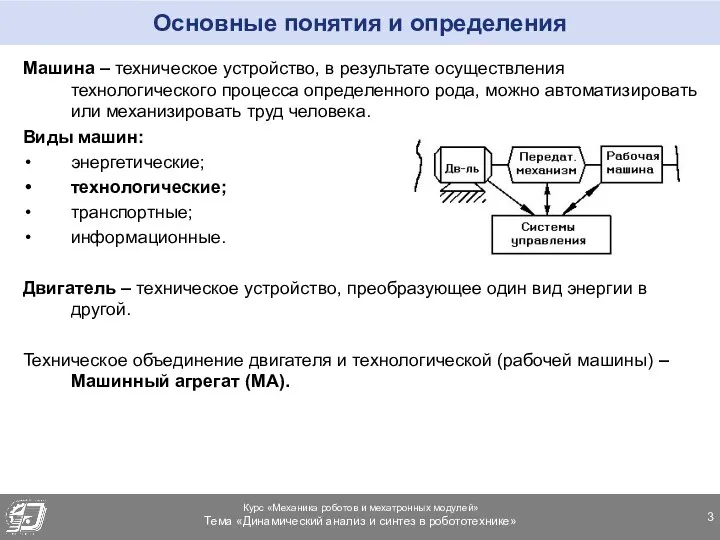
Машина – техническое устройство, в результате осуществления технологического
Основные понятия и определения
Машина – техническое устройство, в результате осуществления технологического
Силы и моменты, действующие в машинном агрегате
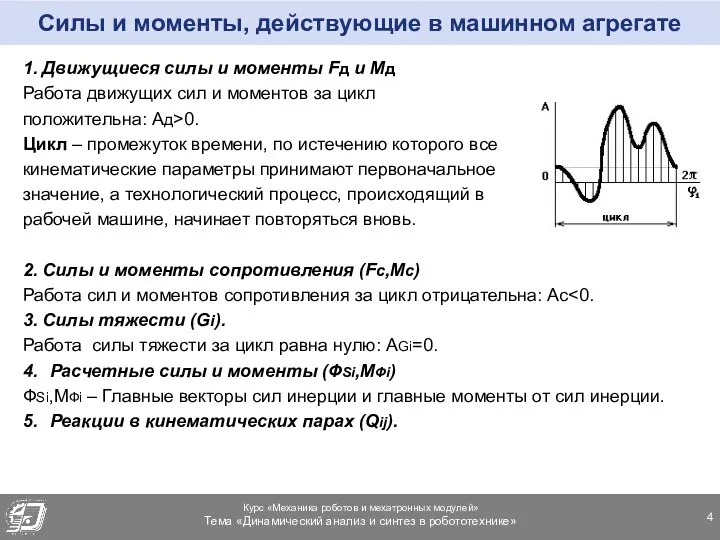
1. Движущиеся силы и моменты
Силы и моменты, действующие в машинном агрегате
1. Движущиеся силы и моменты
Понятие о механических характеристиках
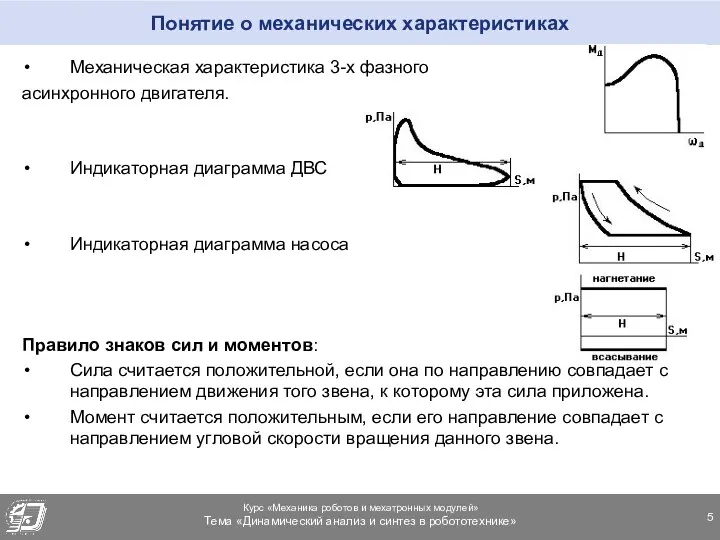
Механическая характеристика 3-х фазного
асинхронного двигателя.
Индикаторная диаграмма ДВС
Индикаторная диаграмма
Понятие о механических характеристиках
Механическая характеристика 3-х фазного
асинхронного двигателя.
Индикаторная диаграмма ДВС
Индикаторная диаграмма
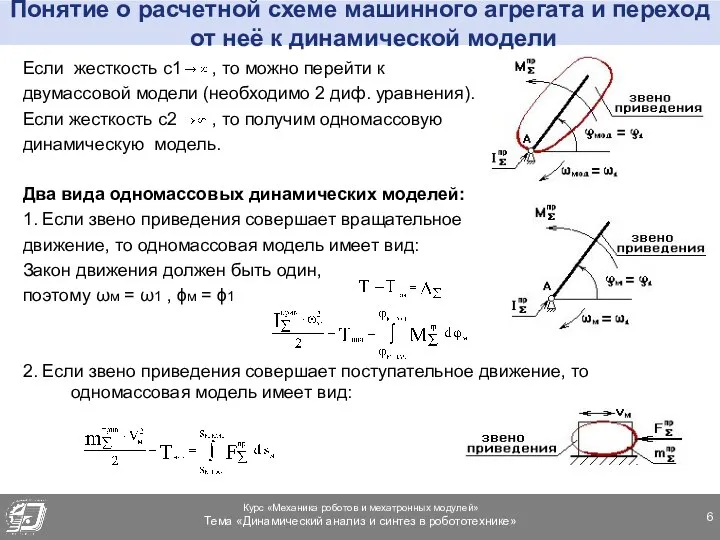
Понятие о расчетной схеме машинного агрегата и переход от неё к
Понятие о расчетной схеме машинного агрегата и переход от неё к
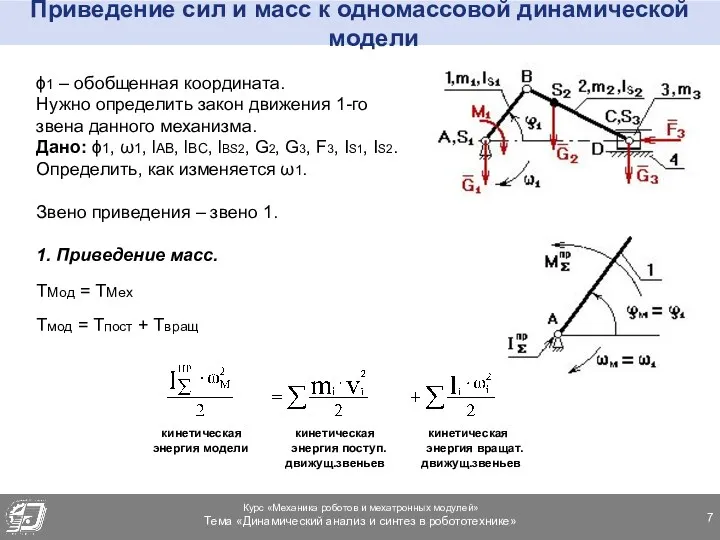
Приведение сил и масс к одномассовой динамической модели
ϕ1 – обобщенная координата.
Нужно
Приведение сил и масс к одномассовой динамической модели
ϕ1 – обобщенная координата.
Нужно
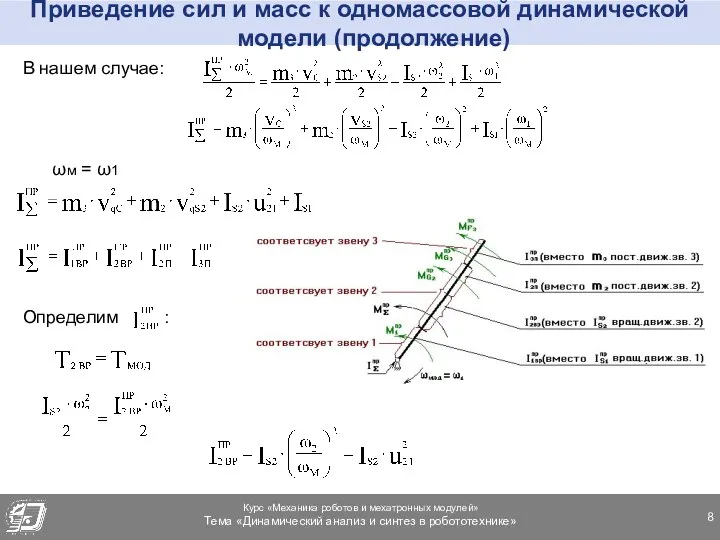
Приведение сил и масс к одномассовой динамической модели (продолжение)
В нашем случае:
ωм
Приведение сил и масс к одномассовой динамической модели (продолжение)
В нашем случае:
ωм
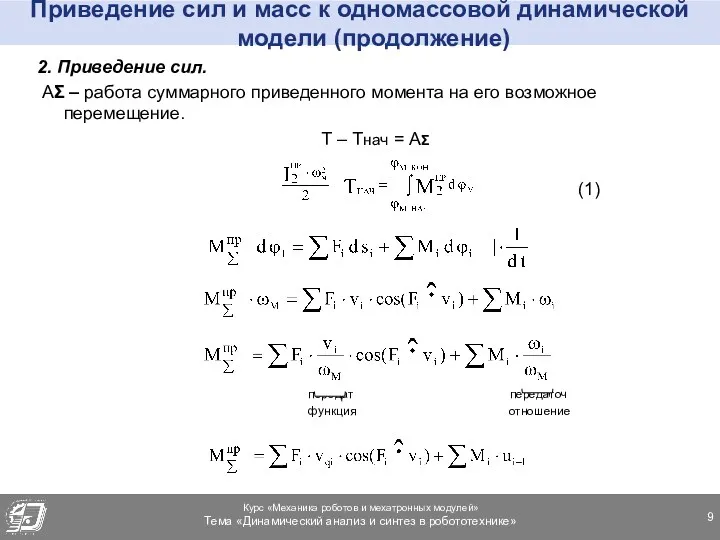
Приведение сил и масс к одномассовой динамической модели (продолжение)
2. Приведение сил.
Приведение сил и масс к одномассовой динамической модели (продолжение)
2. Приведение сил.
Приведение сил и масс к одномассовой динамической модели (продолжение)
Вместо силы
Приведение сил и масс к одномассовой динамической модели (продолжение)
Вместо силы
Режимы работы машинного агрегата
а) разгон б) торможение (выбег)
в) безударный останов г)
Режимы работы машинного агрегата
а) разгон б) торможение (выбег)
в) безударный останов г)
Законы движения звена приведения одномассовой динамической модели
1. Для неустановившегося режима работы
Законы движения звена приведения одномассовой динамической модели
1. Для неустановившегося режима работы
Законы движения звена приведения одномассовой динамической модели (продолжение)
Для определения угловой скорости
Законы движения звена приведения одномассовой динамической модели (продолжение)
Для определения угловой скорости
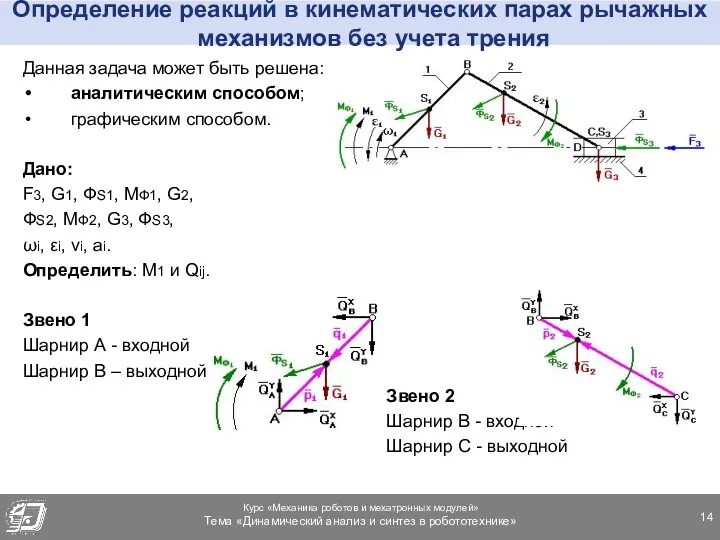
Определение реакций в кинематических парах рычажных механизмов без учета трения
Данная задача
Определение реакций в кинематических парах рычажных механизмов без учета трения
Данная задача
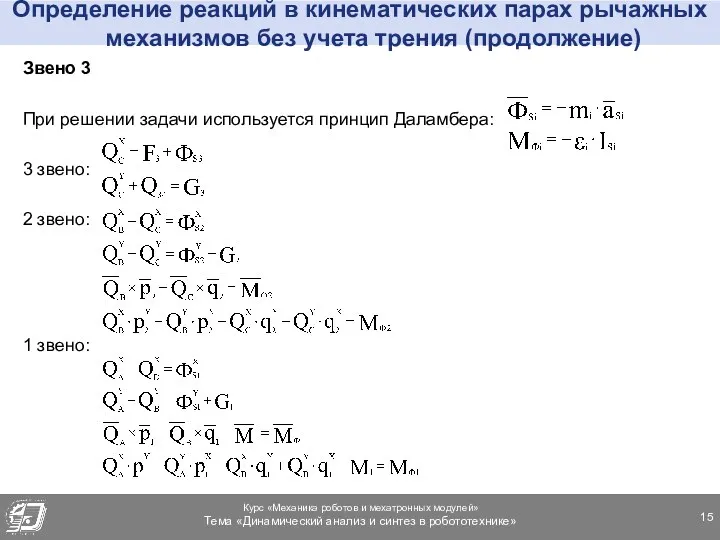
Определение реакций в кинематических парах рычажных механизмов без учета трения (продолжение)
Звено
Определение реакций в кинематических парах рычажных механизмов без учета трения (продолжение)
Звено
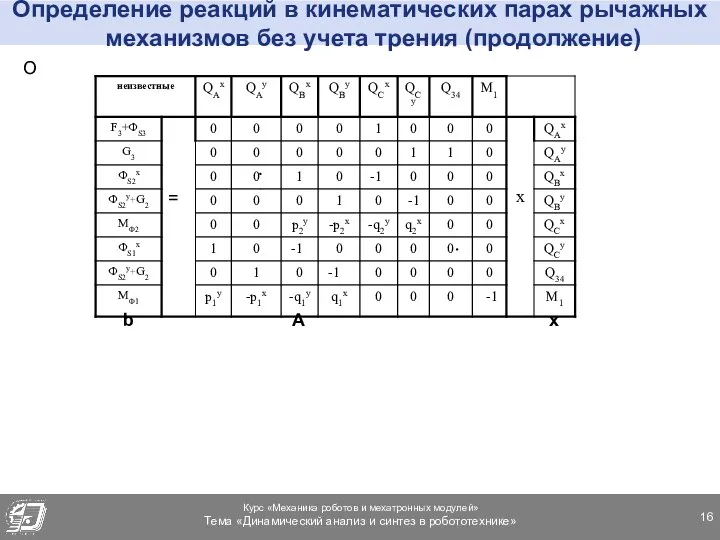
Определение реакций в кинематических парах рычажных механизмов без учета трения (продолжение)
О
b
Определение реакций в кинематических парах рычажных механизмов без учета трения (продолжение)
О
b
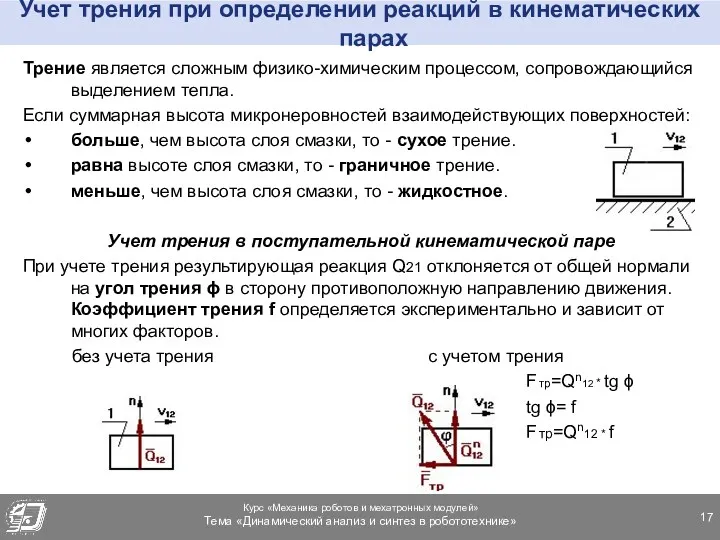
Учет трения при определении реакций в кинематических парах
Трение является сложным физико-химическим
Учет трения при определении реакций в кинематических парах
Трение является сложным физико-химическим
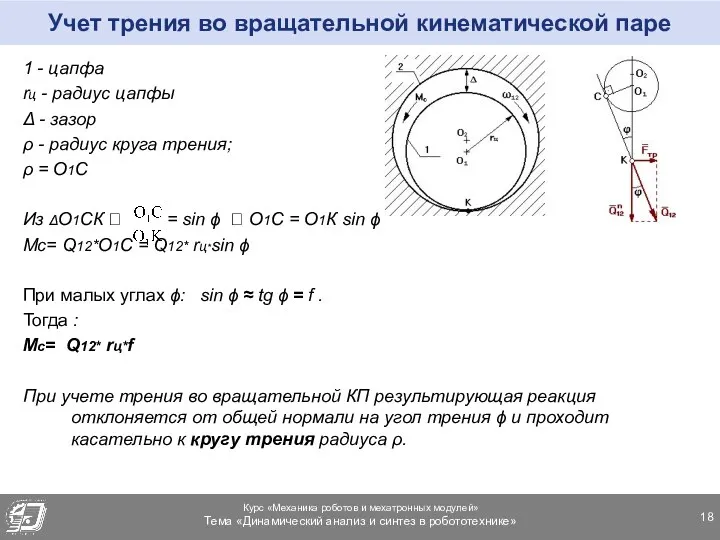
Учет трения во вращательной кинематической паре
1 - цапфа
rц - радиус цапфы
Δ
Учет трения во вращательной кинематической паре
1 - цапфа
rц - радиус цапфы
Δ
Динамический анализ механизмов
Предметом динамики манипулятора как раздела робототехники является математическое описание
Динамический анализ механизмов
Предметом динамики манипулятора как раздела робототехники является математическое описание
Методы построения динамической модели манипулятора
1. Метод Лагранжа-Эйлера
Уравнения Лагранжа – Эйлера обеспечивают
Методы построения динамической модели манипулятора
1. Метод Лагранжа-Эйлера
Уравнения Лагранжа – Эйлера обеспечивают
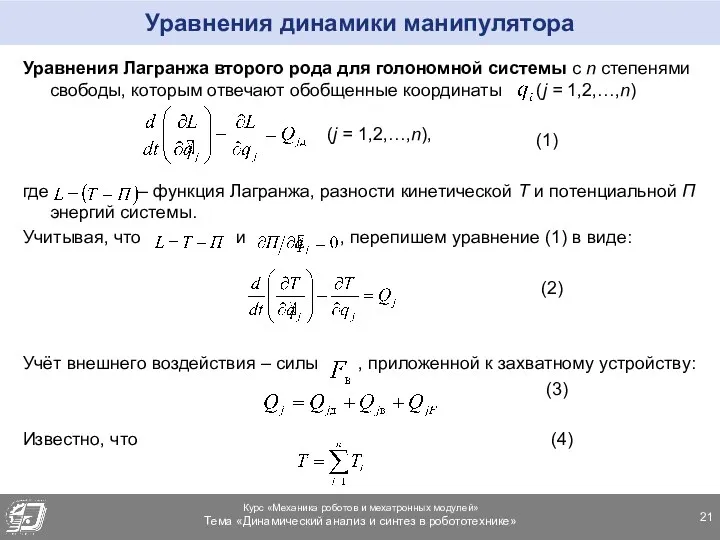
Уравнения динамики манипулятора
Уравнения Лагранжа второго рода для голономной системы с n
Уравнения динамики манипулятора
Уравнения Лагранжа второго рода для голономной системы с n
Уравнения динамики манипулятора (продолжение)
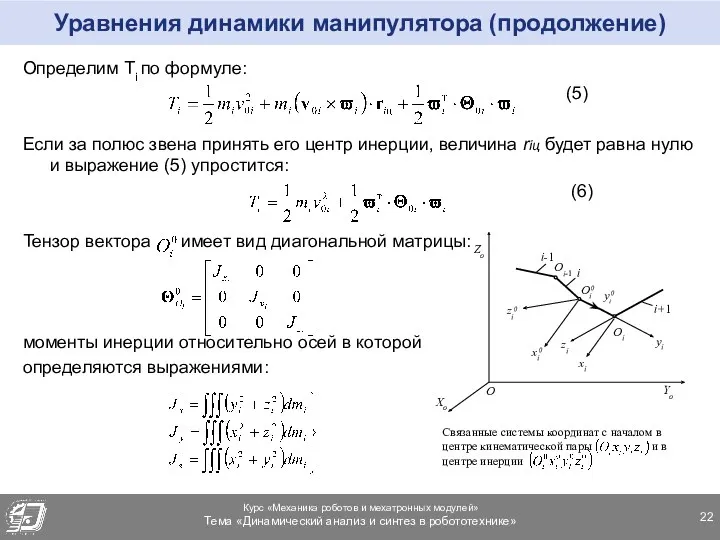
Определим Тi по формуле:
(5)
Если за полюс звена
Уравнения динамики манипулятора (продолжение)
Определим Тi по формуле:
(5)
Если за полюс звена
Уравнения динамики манипулятора (продолжение)
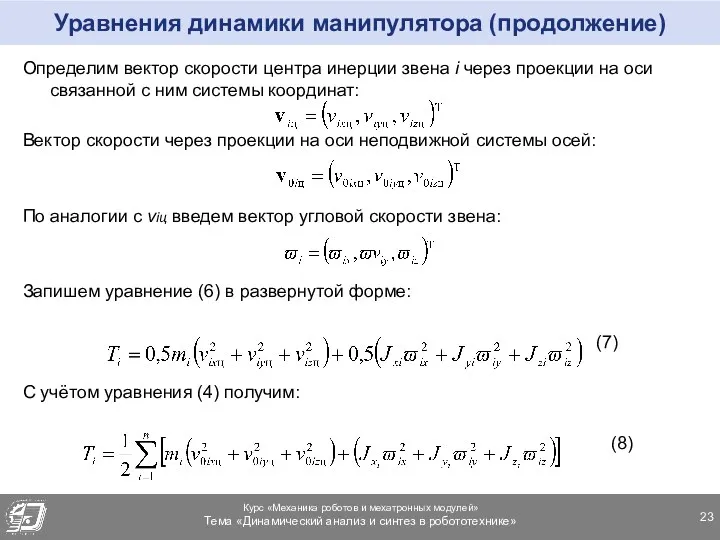
Определим вектор скорости центра инерции звена i через
Уравнения динамики манипулятора (продолжение)
Определим вектор скорости центра инерции звена i через
Заключение
При решении задач динамики необходимо построить динамическую модель многозвенного механизма (манипулятора).
Заключение
При решении задач динамики необходимо построить динамическую модель многозвенного механизма (манипулятора).
 Социальное партнёрство с родителями, как условие развития творческих способностей обучающихся
Социальное партнёрство с родителями, как условие развития творческих способностей обучающихся  149512
149512 Artificial intelligence
Artificial intelligence Предварительное обогащение
Предварительное обогащение Кратко о форсайте
Кратко о форсайте презентация мастер-класс Фоторамка - подготовительная группа
презентация мастер-класс Фоторамка - подготовительная группа Презентация Адаптация детей к школе.
Презентация Адаптация детей к школе. Государство Турция
Государство Турция Достопримечательности Европы
Достопримечательности Европы Welcome to Apple
Welcome to Apple Иммобилайзеры SHINCHANG
Иммобилайзеры SHINCHANG Антуан де Сент Экзюпери
Антуан де Сент Экзюпери Косарева Н.Н., Отставнова В.В. Использование информационно - коммуникационных технологий на уроках русского языка и литературы для активизации познавательной деятельности обучающихся.
Косарева Н.Н., Отставнова В.В. Использование информационно - коммуникационных технологий на уроках русского языка и литературы для активизации познавательной деятельности обучающихся. Налог на имущество физических лиц
Налог на имущество физических лиц Классификация и архитектура Windows Server
Классификация и архитектура Windows Server Вклад М.В.Ломоносова в развитие химии.
Вклад М.В.Ломоносова в развитие химии. Выделение существенных признаков
Выделение существенных признаков Совместный проект детей, воспитателя и родителей в старшей группе Промыслы нижегородкой области
Совместный проект детей, воспитателя и родителей в старшей группе Промыслы нижегородкой области Другу
Другу Традиционная народная кукла
Традиционная народная кукла Проверочная работа по теме Климат России
Проверочная работа по теме Климат России История одной фотографии
История одной фотографии Библиология. Перевод священного писания
Библиология. Перевод священного писания Сварка жаропрочных сталей и сплавов
Сварка жаропрочных сталей и сплавов Свайные фундаменты
Свайные фундаменты Cтроительные машины для уплотнения строительных смесей
Cтроительные машины для уплотнения строительных смесей Высшие растения
Высшие растения Портфоліо Кратік Надії Вікторівни
Портфоліо Кратік Надії Вікторівни