- Движение робота на двухмоторной тележке с ориентированием по стенке

Содержание
- 2. Для настройки робота а режиме 2D отладки, следует загрузить модель мира «Стенка»
- 3. TRIK, ИК датчик расстояния подключен к порту 1. Модель робота – 2D модель Для начала настроим
- 4. Для программирования робота, следующего по линии, применяется принцип пропорционального регулирования, который мы уже изучили на предыдущих
- 5. Отладка робота в Trik Studio Для отладки робота используем виртуального робота на основе двухмоторной тележки и
- 7. Скачать презентацию
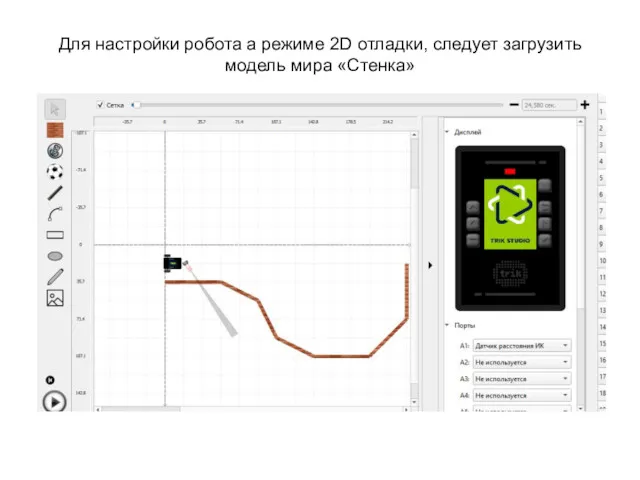
Для настройки робота а режиме 2D отладки, следует загрузить модель мира
Для настройки робота а режиме 2D отладки, следует загрузить модель мира
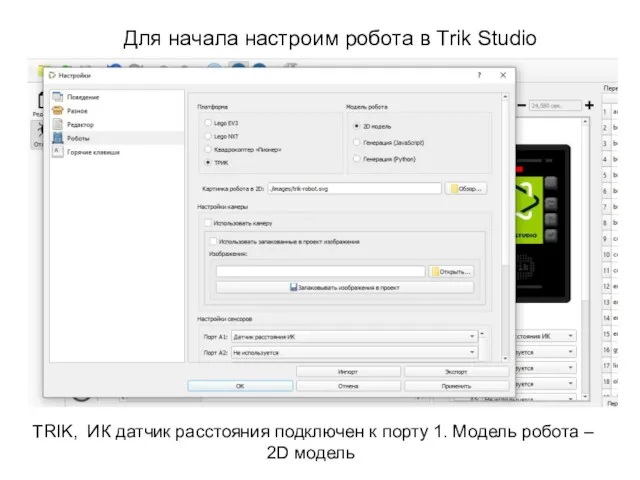
TRIK, ИК датчик расстояния подключен к порту 1. Модель робота –
TRIK, ИК датчик расстояния подключен к порту 1. Модель робота –

Для программирования робота, следующего по линии, применяется принцип пропорционального регулирования, который
Для программирования робота, следующего по линии, применяется принцип пропорционального регулирования, который
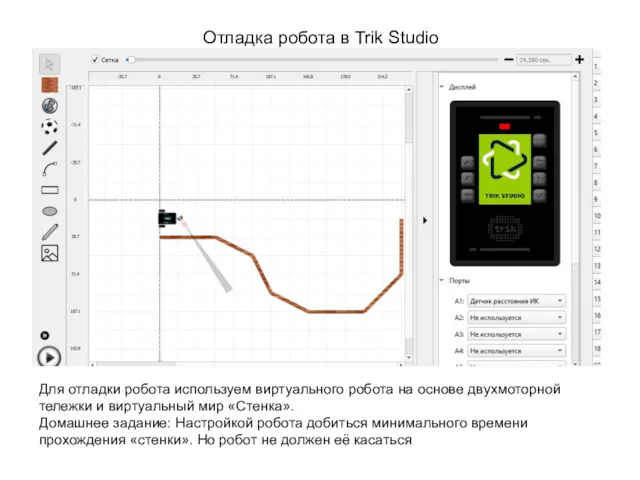
Отладка робота в Trik Studio
Для отладки робота используем виртуального робота на
Отладка робота в Trik Studio
Для отладки робота используем виртуального робота на
 Телевизионные системы наблюдения
Телевизионные системы наблюдения Регулювання міжнародної економічної діяльності
Регулювання міжнародної економічної діяльності Урок технологии 1 класс. Лепка совы.
Урок технологии 1 класс. Лепка совы. Региональная программа капитального ремонта на 2015-2044 годы
Региональная программа капитального ремонта на 2015-2044 годы Обдирочно-зачистное отделение цеха. Проект электроснабжения
Обдирочно-зачистное отделение цеха. Проект электроснабжения Производственная практика на АО Алмазы Анабара. Промывка геологических проб
Производственная практика на АО Алмазы Анабара. Промывка геологических проб Центр изучения восточной культуры Амрита. Выступления ансамбля
Центр изучения восточной культуры Амрита. Выступления ансамбля Учимся читать вместе
Учимся читать вместе Презентация: Библейская заповедь Помни о выходном дне
Презентация: Библейская заповедь Помни о выходном дне Полупроводниковые диоды
Полупроводниковые диоды Решение текстовых задач. 9-11 классы
Решение текстовых задач. 9-11 классы Построение таблиц истинности сложных высказываний
Построение таблиц истинности сложных высказываний Стрелковое оружие, гранатометы и ручные гранаты. Материальная часть стрелкового оружия АК-74, ПМ
Стрелковое оружие, гранатометы и ручные гранаты. Материальная часть стрелкового оружия АК-74, ПМ Транспортное строительство. Защита от шума жилой застройки
Транспортное строительство. Защита от шума жилой застройки Презентация Скоро, скоро Новый год!
Презентация Скоро, скоро Новый год! Открытое занятие педагога - психолога с детьми подготовительной группы Добро пожаловать в гости к деду Всеведу.
Открытое занятие педагога - психолога с детьми подготовительной группы Добро пожаловать в гости к деду Всеведу. The simpsons. Parts of the body
The simpsons. Parts of the body В зоопарке
В зоопарке Старая Ладога
Старая Ладога Разработка мероприятий по снижению безработицы в Ставропольском крае
Разработка мероприятий по снижению безработицы в Ставропольском крае Наш прадедушка — участник войны
Наш прадедушка — участник войны Проект Почему мы перестали быть навсегда в ответе за тех, кого приручили?
Проект Почему мы перестали быть навсегда в ответе за тех, кого приручили? Инновации в образовании
Инновации в образовании Общие сведения о мире животных. Зоология - наука о животных
Общие сведения о мире животных. Зоология - наука о животных Аммиак NH3
Аммиак NH3 организация летней оздоровительной кампании 2022
организация летней оздоровительной кампании 2022 Презентация Что за чудо домовой
Презентация Что за чудо домовой Инновационные модели обучения на уроках географии
Инновационные модели обучения на уроках географии