- Электрические машины постоянного тока. Лекция 12

Содержание
- 2. 6. Электрические машины постоянного тока 6.8. Пуск ДПТ 6.9. Свойство саморегулирования ДПТ 6.10. Основные характеристики ДПТ
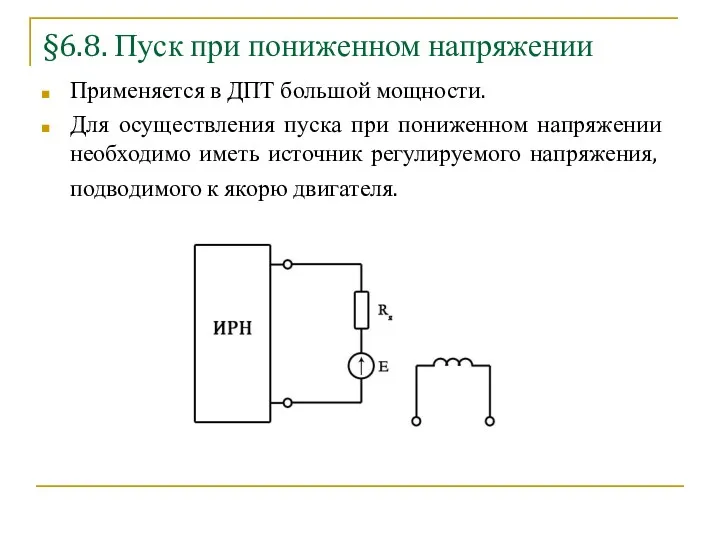
- 3. §6.8. Пуск при пониженном напряжении Применяется в ДПТ большой мощности. Для осуществления пуска при пониженном напряжении
- 4. §6.8. Пуск при пониженном напряжении Уменьшение подводимого к якорю напряжения приводит к уменьшению пускового тока и
- 5. §6.8. Реверс – изменение направления вращения Направление вращения якоря ДПТ можно изменить на противоположное, изменив направление
- 6. §6.9. Свойство саморегулирования ДПТ Свойство саморегулирования заключается в способности двигателей постоянного тока автоматически создавать вращающий момент,
- 7. §6.10. Основные характеристики ДПТ Основной характеристикой ДПТ является механическая характеристика – зависимость частоты вращения от величины
- 8. §6.10. ДПТ с независимым и параллельным возбуждением ДПТ с независимым возбуждением ДПТ с параллельным возбуждением
- 9. §6.10. ДПТ с независимым и параллельным возбуждением – частота вращения при идеальном холостом ходе, когда нет
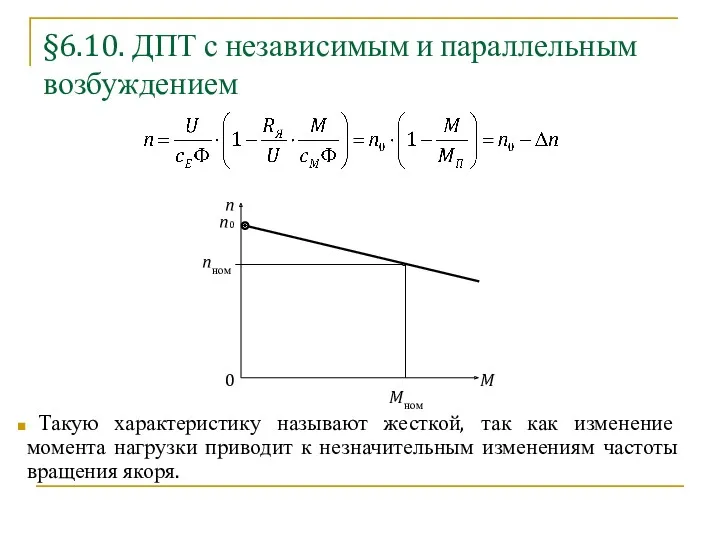
- 10. §6.10. ДПТ с независимым и параллельным возбуждением M n n0 0 Mном nном Такую характеристику называют
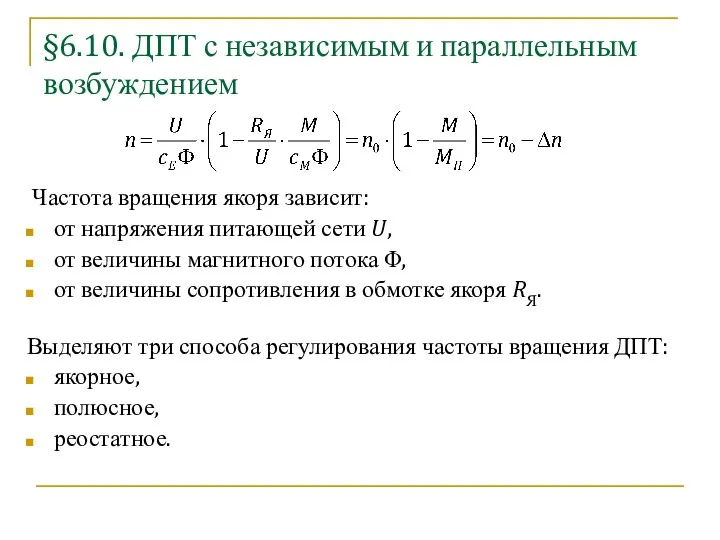
- 11. §6.10. ДПТ с независимым и параллельным возбуждением Частота вращения якоря зависит: от напряжения питающей сети U,
- 12. §6.10. ДПТ с последовательным возбуждением
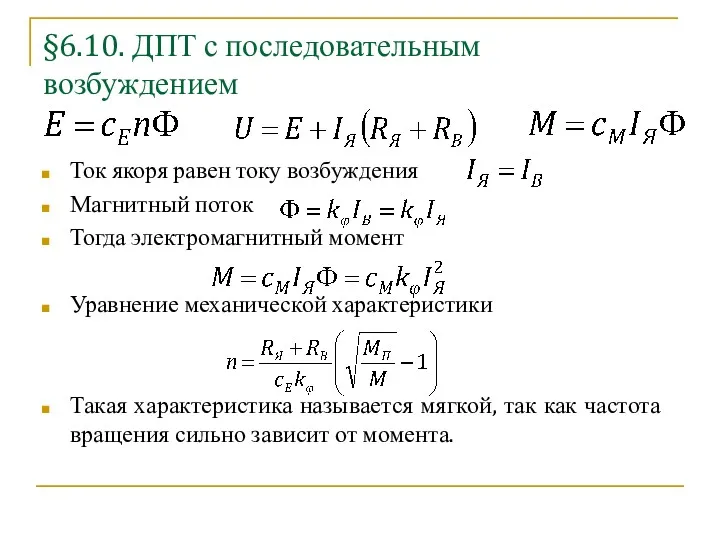
- 13. §6.10. ДПТ с последовательным возбуждением Ток якоря равен току возбуждения Магнитный поток Тогда электромагнитный момент Уравнение
- 14. §6.11. ДПТ с последовательным возбуждением Ток якоря в таких двигателях меньше зависит от нагрузки. При нагрузках,
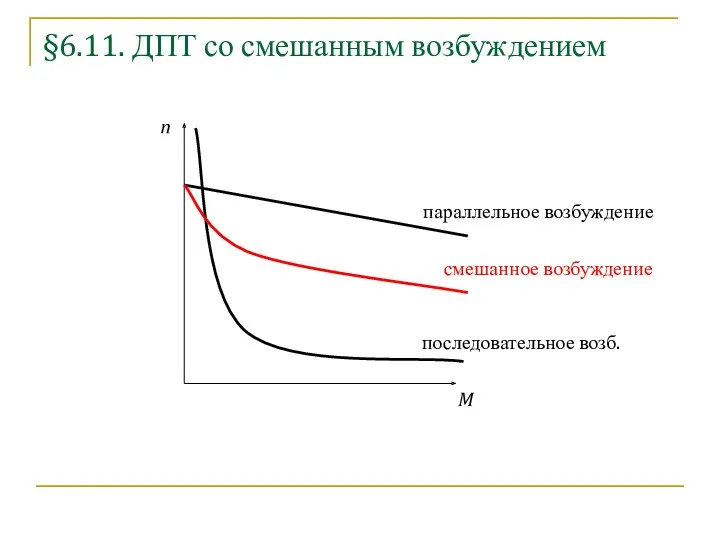
- 15. §6.11. ДПТ со смешанным возбуждением В двигателях смешанного возбуждения магнитный поток создается действием двух обмоток возбуждения
- 16. §6.11. ДПТ со смешанным возбуждением M n параллельное возбуждение последовательное возб. смешанное возбуждение
- 17. §6.11. Регулирование частоты вращения в ДПТ с независимым и параллельным возбуждением Частота вращения якоря зависит: от
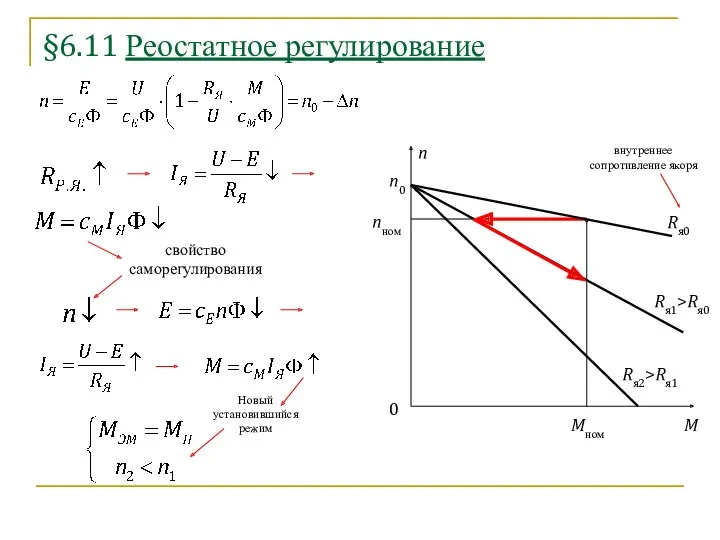
- 18. §6.11 Реостатное регулирование Заключается в добавлении добавочного регулировочного реостата в цепь якоря. Частный случай – реостатный
- 19. §6.11 Реостатное регулирование свойство саморегулирования M n n0 0 Mном nном Rя0 Rя1>Rя0 Rя2>Rя1 внутреннее сопротивление
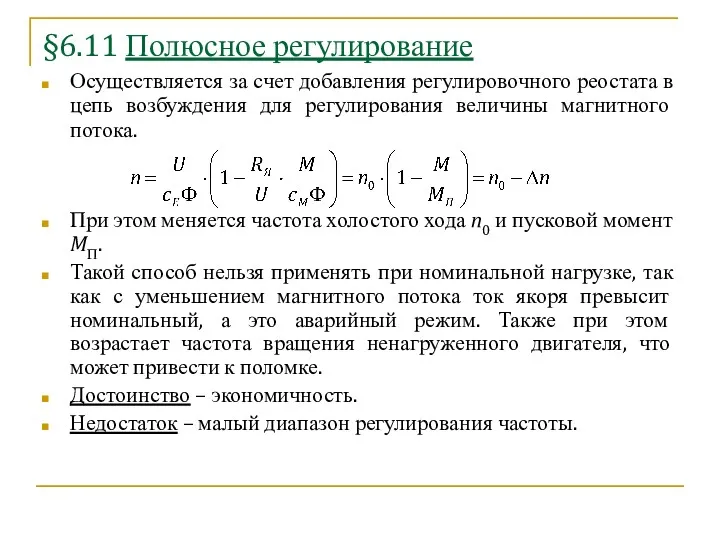
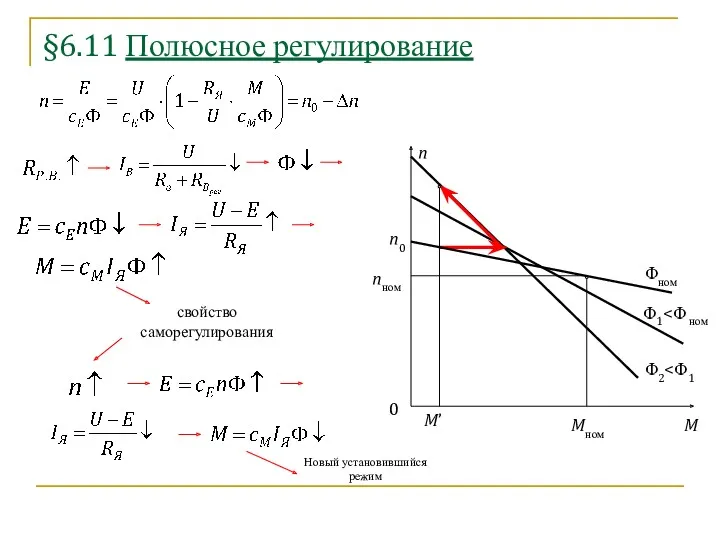
- 20. §6.11 Полюсное регулирование Осуществляется за счет добавления регулировочного реостата в цепь возбуждения для регулирования величины магнитного
- 21. §6.11 Полюсное регулирование свойство саморегулирования M n n0 0 Mном nном Φном Φ1 Φ2 M’ Новый
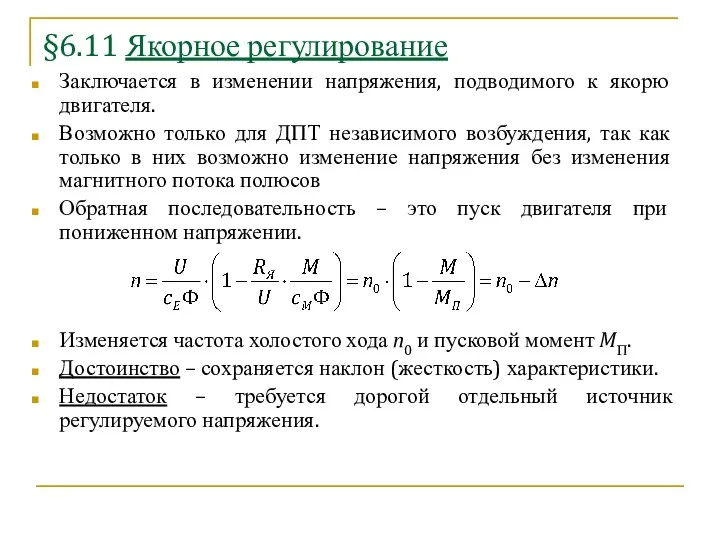
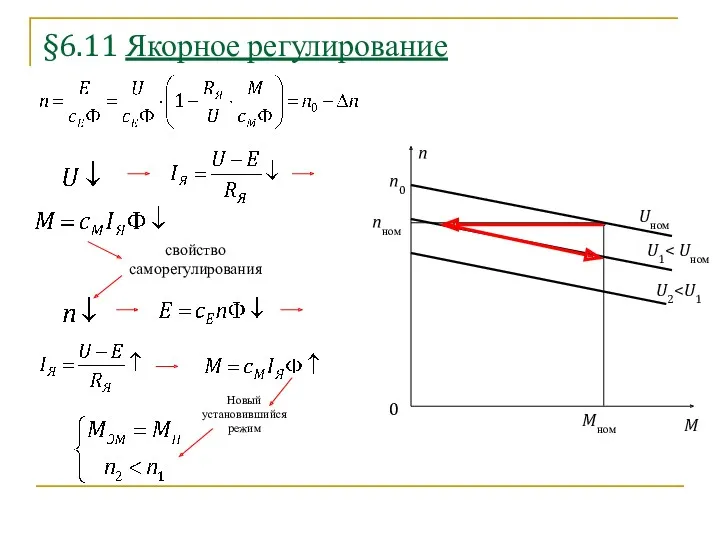
- 22. §6.11 Якорное регулирование Заключается в изменении напряжения, подводимого к якорю двигателя. Возможно только для ДПТ независимого
- 23. §6.11 Якорное регулирование свойство саморегулирования M n n0 0 Mном nном Uном U1 U2 Новый установившийся
- 24. §6.12. Баланс мощностей в ГПТ Затраченная мощность – механическая Pмех, полезная мощность – электрическая Pэл. Магнитные
- 25. §6.12. Баланс мощностей в ДПТ Затраченная мощность – электрическая Pэл, полезная мощность –механическая Pмех. Электрические потери
- 27. Скачать презентацию
6. Электрические машины постоянного тока
6.8. Пуск ДПТ
6.9. Свойство саморегулирования ДПТ
6.10. Основные
6. Электрические машины постоянного тока
6.8. Пуск ДПТ
6.9. Свойство саморегулирования ДПТ
6.10. Основные
§6.8. Пуск при пониженном напряжении
Применяется в ДПТ большой мощности.
Для осуществления пуска
§6.8. Пуск при пониженном напряжении
Применяется в ДПТ большой мощности.
Для осуществления пуска
§6.8. Пуск при пониженном напряжении
Уменьшение подводимого к якорю напряжения приводит к
§6.8. Пуск при пониженном напряжении
Уменьшение подводимого к якорю напряжения приводит к
§6.8. Реверс – изменение направления вращения
Направление вращения якоря ДПТ можно изменить
§6.8. Реверс – изменение направления вращения
Направление вращения якоря ДПТ можно изменить
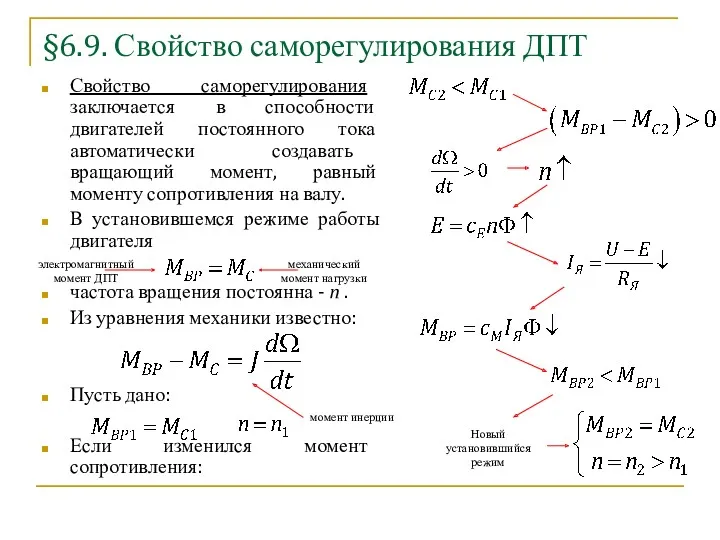
§6.9. Свойство саморегулирования ДПТ
Свойство саморегулирования заключается в способности двигателей постоянного тока
§6.9. Свойство саморегулирования ДПТ
Свойство саморегулирования заключается в способности двигателей постоянного тока
§6.10. Основные характеристики ДПТ
Основной характеристикой ДПТ является механическая характеристика – зависимость
§6.10. Основные характеристики ДПТ
Основной характеристикой ДПТ является механическая характеристика – зависимость
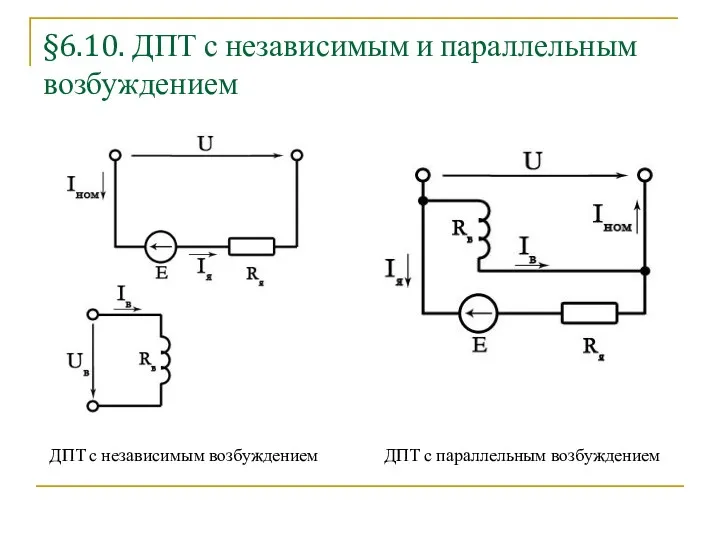
§6.10. ДПТ с независимым и параллельным возбуждением
ДПТ с независимым возбуждением
ДПТ
§6.10. ДПТ с независимым и параллельным возбуждением
ДПТ с независимым возбуждением
ДПТ
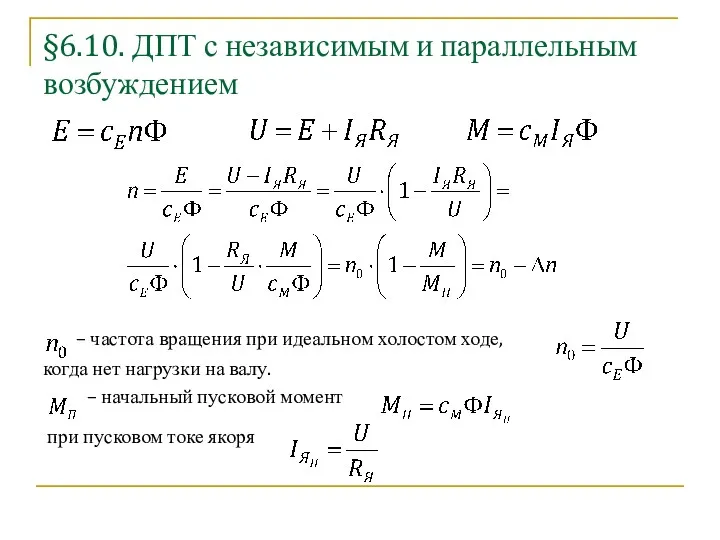
§6.10. ДПТ с независимым и параллельным возбуждением
– частота вращения при
§6.10. ДПТ с независимым и параллельным возбуждением
– частота вращения при
§6.10. ДПТ с независимым и параллельным возбуждением
M
n
n0
0
Mном
nном
Такую характеристику называют жесткой,
§6.10. ДПТ с независимым и параллельным возбуждением
M
n
n0
0
Mном
nном
Такую характеристику называют жесткой,
§6.10. ДПТ с независимым и параллельным возбуждением
Частота вращения якоря зависит:
§6.10. ДПТ с независимым и параллельным возбуждением
Частота вращения якоря зависит:
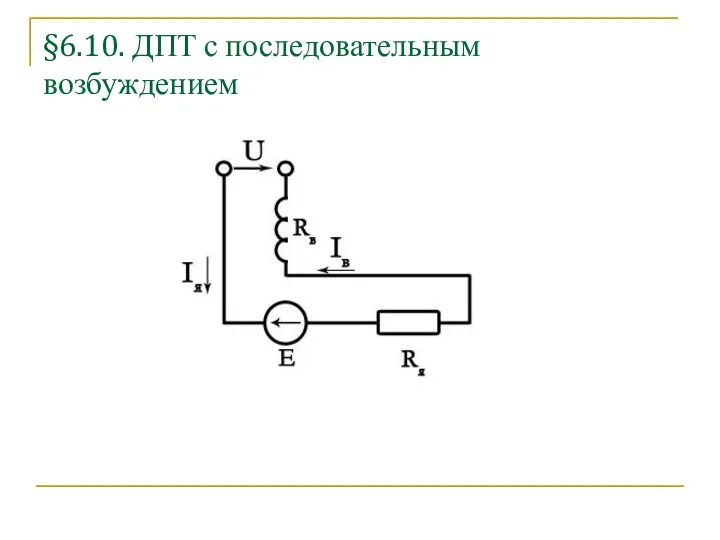
§6.10. ДПТ с последовательным возбуждением
§6.10. ДПТ с последовательным возбуждением
§6.10. ДПТ с последовательным возбуждением
Ток якоря равен току возбуждения
Магнитный поток
Тогда электромагнитный
§6.10. ДПТ с последовательным возбуждением
Ток якоря равен току возбуждения
Магнитный поток
Тогда электромагнитный

§6.11. ДПТ с последовательным возбуждением
Ток якоря в таких двигателях меньше зависит
§6.11. ДПТ с последовательным возбуждением
Ток якоря в таких двигателях меньше зависит
§6.11. ДПТ со смешанным возбуждением
В двигателях смешанного возбуждения магнитный поток создается
§6.11. ДПТ со смешанным возбуждением
В двигателях смешанного возбуждения магнитный поток создается
§6.11. ДПТ со смешанным возбуждением
M
n
параллельное возбуждение
последовательное возб.
смешанное возбуждение
§6.11. ДПТ со смешанным возбуждением
M
n
параллельное возбуждение
последовательное возб.
смешанное возбуждение
§6.11. Регулирование частоты вращения в ДПТ с независимым и параллельным возбуждением
§6.11. Регулирование частоты вращения в ДПТ с независимым и параллельным возбуждением
§6.11 Реостатное регулирование
Заключается в добавлении добавочного регулировочного реостата в цепь якоря.
§6.11 Реостатное регулирование
Заключается в добавлении добавочного регулировочного реостата в цепь якоря.
§6.11 Реостатное регулирование
свойство
саморегулирования
M
n
n0
0
Mном
nном
Rя0
Rя1>Rя0
Rя2>Rя1
внутреннее сопротивление якоря
Новый
установившийся
режим
§6.11 Реостатное регулирование
свойство
саморегулирования
M
n
n0
0
Mном
nном
Rя0
Rя1>Rя0
Rя2>Rя1
внутреннее сопротивление якоря
Новый
установившийся
режим
§6.11 Полюсное регулирование
Осуществляется за счет добавления регулировочного реостата в цепь возбуждения
§6.11 Полюсное регулирование
Осуществляется за счет добавления регулировочного реостата в цепь возбуждения
§6.11 Полюсное регулирование
свойство
саморегулирования
M
n
n0
0
Mном
nном
Φном
Φ1<Φ ном
Φ2<Φ1
M’
Новый установившийся режим
§6.11 Полюсное регулирование
свойство
саморегулирования
M
n
n0
0
Mном
nном
Φном
Φ1<Φ ном
Φ2<Φ1
M’
Новый установившийся режим
§6.11 Якорное регулирование
Заключается в изменении напряжения, подводимого к якорю двигателя.
Возможно только
§6.11 Якорное регулирование
Заключается в изменении напряжения, подводимого к якорю двигателя.
Возможно только
§6.11 Якорное регулирование
свойство
саморегулирования
M
n
n0
0
Mном
nном
Uном
U1< Uном
U2Новый
установившийся
режим
§6.11 Якорное регулирование
свойство
саморегулирования
M
n
n0
0
Mном
nном
Uном
U1< Uном
U2 Новый
установившийся
режим
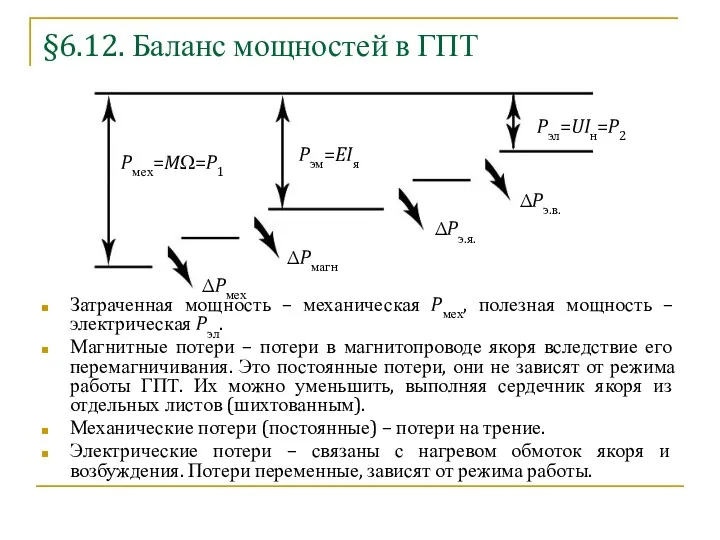
§6.12. Баланс мощностей в ГПТ
Затраченная мощность – механическая Pмех, полезная мощность
§6.12. Баланс мощностей в ГПТ
Затраченная мощность – механическая Pмех, полезная мощность
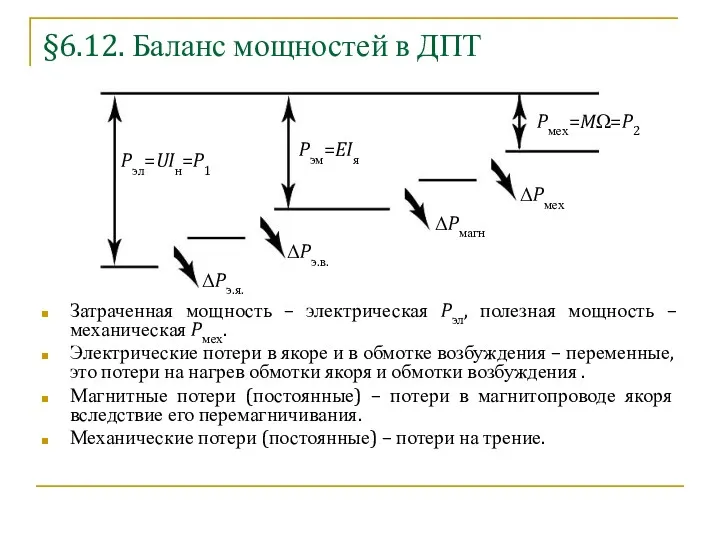
§6.12. Баланс мощностей в ДПТ
Затраченная мощность – электрическая Pэл, полезная мощность
§6.12. Баланс мощностей в ДПТ
Затраченная мощность – электрическая Pэл, полезная мощность
 Педпагогиканың класссгі К.Д. Ушинскийдің мұраларындағы халықтық тәрбие мәселелері
Педпагогиканың класссгі К.Д. Ушинскийдің мұраларындағы халықтық тәрбие мәселелері кл Бизнес и бизнес-план
кл Бизнес и бизнес-план Город Толерантность
Город Толерантность Функции Постоянного комитета СФС по соблюдению международных стандартов
Функции Постоянного комитета СФС по соблюдению международных стандартов Роль религии в жизни общества
Роль религии в жизни общества Weather vocabulary
Weather vocabulary Booking expressions 1
Booking expressions 1 Структура предложения. Английское предложение
Структура предложения. Английское предложение Опиоидные анальгетики
Опиоидные анальгетики Управление персоналом
Управление персоналом Сосудисто-тромбоцитарное звено системы гемостаза
Сосудисто-тромбоцитарное звено системы гемостаза Исследовательская работа Как сформировать правильную осанку
Исследовательская работа Как сформировать правильную осанку Взаємодія генів. Позаядерна спадковість
Взаємодія генів. Позаядерна спадковість Внимание. Виды и свойства внимания
Внимание. Виды и свойства внимания Котики
Котики Период детства от 3 до 6 лет
Период детства от 3 до 6 лет Параллельная работа трансформаторов
Параллельная работа трансформаторов Распределение электронов в атоме
Распределение электронов в атоме ВКР: Ядерный реактор
ВКР: Ядерный реактор Техническое задание на отрисовку планировок
Техническое задание на отрисовку планировок Сүт қышқылды өнімдерді өндіруге пайдаланатын ашытқылардың түрлері және олардың өнім сапасына әсері
Сүт қышқылды өнімдерді өндіруге пайдаланатын ашытқылардың түрлері және олардың өнім сапасына әсері Виброволновые методы интенсификации извлечения остаточной нефти при заводнении нефтяных залежей
Виброволновые методы интенсификации извлечения остаточной нефти при заводнении нефтяных залежей Коммерческое предложение от ООО АвтоКарт
Коммерческое предложение от ООО АвтоКарт Презентация Звук и буква А
Презентация Звук и буква А Открытое занятие
Открытое занятие Сучасна географія виробництва транспортних засобів
Сучасна географія виробництва транспортних засобів Художня культура козацької доби
Художня культура козацької доби Евпатория космическая Туманская Екатерина Большая перемена
Евпатория космическая Туманская Екатерина Большая перемена